
Positioning Method of Four-Wheel Drive Robots Based on
Multi-Sensor Fusion and Improved Adaptive Monte Carlo Algorithm
Zhang Yi
1
, Li Beijun
1,*
and Shi Zhiqiang
2
1
School of Advanced Manufacturing Engineering, Chongqing University of Posts and Telecommunications,
Chongqing, China
2
China Assistive Devices and Technology Center, Beijing, China
Keywords: Adaptive Monte Carlo, Stratified Low Variance Sampling, KLD Sampling, Path Planning.
Abstract: This paper proposes an improved method for the traditional Adaptive Monte Carlo Localization (AMCL)
algorithm, addressing issues such as long computation time and poor real-time updating ability. In the
sampling phase, this method improves the traditional AMCL algorithm by using a parallel approach of
stratified low variance sampling and KLD sampling. Additionally, the improved AMCL algorithm is
integrated into the ROS-based SLAM package to reduce robot positioning errors and improve map accuracy
in unknown environments during simultaneous localization and mapping. It is also integrated into the ROS-
based navigation package to enhance robot's localization accuracy in known environments and optimize both
global and local path planning functionality when loading pre-built maps.
1 INTRODUCTION
Mobile robots have been integrated into society, but
with the development of society, higher requirements
are being put forward for the various performance of
robots, and autonomous operation of robots is one of
them, and autonomous positioning is one of the basic
tasks of autonomous operation. The autonomous
localization of robots is based on the pose estimation
of the previous moment, utilizing environmental
information and sensor data, and optimizing the
algorithm to obtain the pose estimation of the current
moment to locate the mobile robot.
The AMCL (Adaptive Monte Carlo Localization)
localization algorithm is the adaptive Monte Carlo
localization algorithm. It is a classic algorithm in
robot positioning algorithms, widely used in robot
positioning, navigation, and path planning. However,
the traditional AMCL algorithm has high
computational complexity and large computational
load, which cannot meet the real-time requirements of
autonomous mobile robots, autonomous driving, and
other scenarios that require high real-time
performance and quick response. Therefore, this
article proposes an improved AMCL algorithm to
shorten the calculation time of the localization
algorithm.
The main research content of this article is as
follows: In the sampling stage, the AMCL
localization algorithm has been improved, which
involves parallel implementation of Stratified Low
Variance Sampling and KLD sampling. The
improved AMCL localization algorithm not only
shortens the calculation time of localization, but also
improves the accuracy and real-time performance of
localization. At the same time, the improved AMCL
algorithm is loaded into the mapping and navigation
function package of the ROS system (Robot
Operating System). By adjusting the AMCL
parameters and resampling rules, higher precision
grid maps are created in unknown environments. At
the same time, global and local planning are used to
track the localization of robot humans.
2 FUSION LOCALIZATION
BASED ON IMPROVED AMCL
2.1 AMCL Algorithm
The AMCL algorithm is an improved version based
on the MCL (Monte Carlo Localization) algorithm,
which introduces an adaptive mechanism to improve
the accuracy and robustness of localization.
10
Beijun, L., Yi, Z. and Zhiqiang, S.
Positioning Method of Four-Wheel Drive Robots Based on Multi-Sensor Fusion and Improved Adaptive Monte Carlo Algorithm.
DOI: 10.5220/0012875700004536
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 1st International Conference on Data Mining, E-Learning, and Information Systems (DMEIS 2024), pages 10-16
ISBN: 978-989-758-715-3
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

Assuming the robot's pose is
t
x
, The observed
value is
1:t
z , input is
1:t
u , According to Bayesian
theorem, it can be obtained that:
1: 1: 1 1:
1
1: 1 1: 1 1:
1:
1:
(| , |,
|,)*
)( ,)
(( | ,*( )
tt ttt t
tt t
t
ttt
p
p
pxzu zxz u
xz u pzz u
−
−
−−
=
(1)
Among them,
()
1: 1:
|,
ttt
px z u
is the pose state,
1: 1 1:
(,)|,
tt t t
pz x z u
−
is a sensor observation model,
111::
|(,)
tt t
p
x
zu
−
is the motion model,
1: 1 1:
(| , )
tt t
p
zz u
−
is a normalized constant.
By using Bayesian filters, the above equation can
be expressed in recursive form:
() ( ) ( )
()
1
1
|* |,
ttttttt
bel x p z x p x u bel x dx
−−
=
(2)
Among them,
()
|
tt
pz x
is the probability
density function, and
()
()
1
|,
tt t
px ubelx
−
is the
motion model.
For particle filtering, use a set of state
assumptions
[] []
{
}
1
,
M
ii
tt
i
xw
=
to approximate the
posterior distribution
()
1: 1:
|,
ttt
px z u
, where
[]
i
t
x
is
the state assumption of the i-th particle,
[]
i
t
w
is the
weight of the i-th particle. By randomly sampling a
group of particles in the state space, a rough state
estimation can be obtained.
Predicting each particle based on the motion
model as the robot moves:
[] []
()
[]
1
|, ε
iii
ttttt
xpxxu
−
=+
(3)
Among them,
[
]
ε
i
t
is a random disturbance from
motion model noise.
When the robot receives sensor observations, the
weight of each particle is updated based on the sensor
model:
[] []
()
[]
()
1
1
|* |
M
ii i
ttt tt
j
pz x pz x
ω
−
=
=
(4)
Among them,
[]
()
|
i
tt
pz x
represents the
observation probability of the given particle position
by the sensor.
The particles and their corresponding weights are
resampled to update the state estimates. This process
can be done by randomly sampling from the current
particle distribution and generating a new set of
particles according to the particle weight distribution.
2.2 Stratified Low Variance Sampling
In the AMCL algorithm, the resampling process has
a significant impact on the accuracy and speed of the
algorithm, but traditional polynomial resampling
methods can lead to high variance in certain
situations, making the estimation results unstable; At
the same time, because polynomial resampling is
done through polynomial distribution, it can cause
some important samples to be discarded during the
resampling process, thereby affecting the accuracy of
the estimation. In order to ensure the stability and
accuracy of the algorithm, the stratified low variance
sampling method is selected in this paper.
The main idea of stratified low variance sampling
is to divide the population sample into several layers,
and then conduct random sampling in each layer, so
that the sample proportion of each layer is the same
as the population. This can ensure the
representativeness of the sample and reduce the
variance of the sample. Assuming we have N
particles, each with a weight of
i
w . We need to
resample these particles to obtain new N particles that
satisfy the relationship between weight and
probability density function. Firstly, normalize the
weights of all particles to obtain the probability
density function
i
p
:
1
1
*
i
t
ii j
j
pw w
−
=
=
(5)
Then integrate the probability density function
and calculate the cumulative distribution function:
1
i
ij
j
Cp
=
=
(6)
Next, generate a random number
1
[0, )uN
−
∈
as
the starting point for the first sampled particle, and
define two variables j, k, both of which have an initial
value of 1.
Generate a uniformly distributed random number
()
1
0,
j
rU N
−
and use the following formula for
resampling:
1
1
1, 1
jk
tt
jk
tt
jj
if u r C
then x x
and j j k k
else x x
+
+
+>
=
=+ =+
=
(7)
Repeat the above resampling until k>N.
Finally, set the weights of all new particles to
1
N
−
. This completes the entire hierarchical low variance
resampling process.
2.3 KLD Sampling
KLD sampling is a key technique for particle filter
adaptation and is commonly used to determine
Positioning Method of Four-Wheel Drive Robots Based on Multi-Sensor Fusion and Improved Adaptive Monte Carlo Algorithm
11
whether resampling is necessary. Its principle is
based on Kullback-Leibler divergence, which
measures the degree of difference between two
probability distributions and can be used to evaluate
the representativeness of particle sets. Assuming
there is a target particle collection for KLD sampling
to determine whether to resample, the weight of the
target particle is first calculated by normalizing the
particle weight:
()
()
1
ii
qwsunw
−
=
(8)
Among them,
i
q represents the target weight of
particle i,
i
w represents the weight of particle i, and
()
s
un w
represents the sum of all particle weights.
Calculate the KL divergence between the
approximate distribution and the true distribution to
determine if they are close:
( ) () () ()
()
(
)
1
|| log *
K
LP Q Px Px Qx dx
−
=
(9)
Among them,
()
P
x
represents the probability
density of the true distribution at x, and
()
Qx
represents the probability density of the approximate
distribution at x.
Calculate the probability density function of an
approximate distribution, expressed as:
() ( )
()
*
ii
Qx q x x
δ
=−
(10)
Among them,
()
i
x
x
δ
−
is the Dirac Delta
function, represented
i
x
x− , the value is 1, otherwise
it is 0.
Substitute the probability density function of the
approximate distribution into the KL divergence
formula and perform an integral operation on the
entire space:
()() () ()
()
(
)
1
|| log * *
ii
K
LP Q Px Px q x x d
x
δ
−
=−
(11)
Since the approximate distribution is represented
by a set of particles, we can introduce an importance
weight w_i for each particle. So that the approximate
distribution can be represented as:
() ( )
()
*
ii
Qx w x x
δ
=−
(12)
Substitute the probability density function of the
approximate distribution with importance weights
into the KL divergence formula and perform
integration operations on the entire space:
( ) () () ( )
()
(
)
1
|| log * *
ii
K
LP Q Px Px w x x d
x
δ
−
=−
(13)
Due to the properties of the Dirac Delta function,
the KL divergence formula can be further
transformed into:
( ) () ()
()
()
()
1
|| log * *
ieff
K
LP Q Px Px w x x
δ
−
=−
(14)
Among them,
()()
()
1
**
eff i i i
xwxw
−
=
is
the weighted average position.
Define the number of effective particles
eff
N
is:
()
1
2
()
eff i
Nw
−
=
, and then based on the relationship
between KL divergence and the number of effective
particles, it can be determined whether resampling is
necessary.
2.4 AMCL Based on Parallel
Resampling and KLD Sampling
Traditional KLD sampling involves resampling at a
specific time and generating a new particle set after
resampling is completed. Then perform KLD
sampling on all particles one by one. When the
number of sampled particles reaches the required
number of particles according to the KLD criterion,
the remaining particles will not participate in
subsequent probability statistical operations, and the
KLD sampling of these particles will also be
terminated. Sampling termination requires
resampling and KLD sampling, which will greatly
increase calculation time and also cause positioning
delay. In order to shorten calculation time, improve
positioning accuracy and real-time performance, it is
proposed to parallelize resampling and KLD
sampling. In this method, a resampling operation is
first performed while calculating the KL divergence
of the particle set. Then, based on the results of KL
divergence, determine whether resampling is
necessary again.
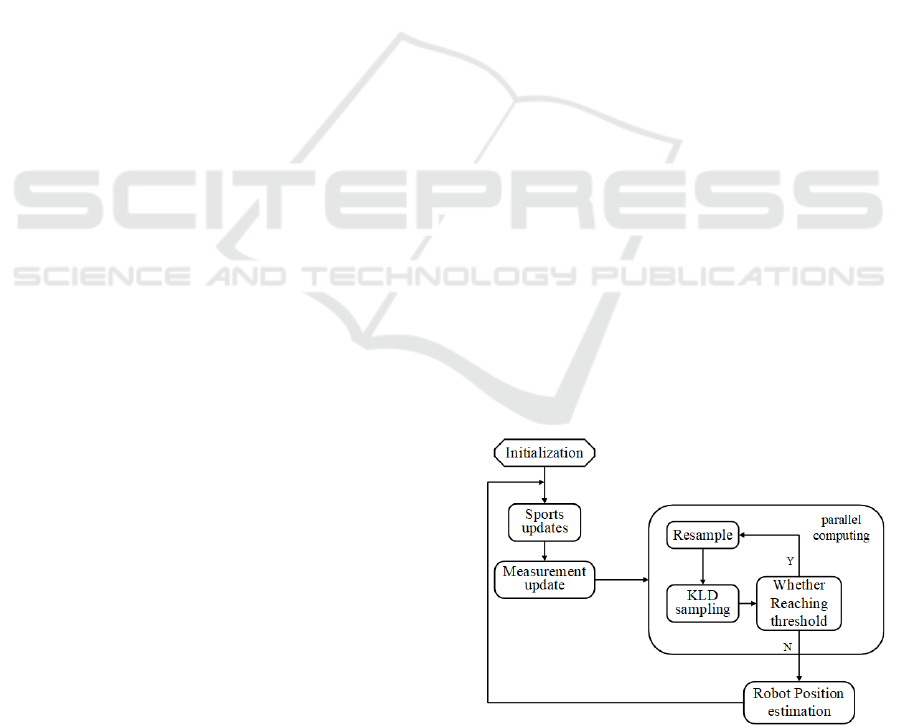
The AMCL algorithm process based on parallel
resampling and KLD sampling is as follows:
Figure 1: Improved AMCL Algorithm Process.
DMEIS 2024 - The International Conference on Data Mining, E-Learning, and Information Systems
12
1) Firstly, initialize the filter, collect and generate
an initial particle set, and assign equal weights to each
particle.
2) Based on the motion model of the robot, each
particle is sampled and predicted to update its state.
Assuming the linear velocity of the robot is v and the
angular velocity of the robot is ω, Sports updates are
as follows:
()
1
**cos
tt t
xxtv
θ
+
=+Δ
(15)
()
1
**sin
tt t
yytv
θ
+
=+Δ
(16)
1
*
tt
t
θθ ω
+
=+Δ
(17)
Among them,
t
x
and
t
y
represents the position
coordinate of the robot at time t,
t
θ
represents the
orientation angle of the robot at time t, and ∆t
represents the time step.
3) Update the weight of each particle based on the
sensor measurement information of the robot. Based
on the particle's location and map, use the
measurement model to calculate the probability
density function
()
|
tt
pz x
of the particle under the
current measurement, and calculate the weight
i
w of
each particle by the total weight of all particles to
obtain the normalized weight
'
i
w
, and use the
normalized weight
'
i
w
as the final weight of
i
x
.
Based on the normalized weight of each particle
'
i
w
, resampling is performed to obtain a new particle
set
{
}
'' '
12
,,,
N
x
xx
. Then, the KLD calculation
method is used to compare the weight distribution of
the new particle set with the target weight
distribution, and the KLD value is calculated:
()
'
1
''
1
*log *
N
iii
i
KLD w w w
−
=
=
(18)
Among them,
'
N
represents the number of
particles obtained after resampling.
Then evaluate whether resampling is necessary
based on the set threshold. If the KLD value exceeds
the threshold, resampling is performed; On the
contrary, skip the resampling step.
5) Repeat steps 2 to 4 for motion updates,
measurement updates, parallel resampling, and KLD
calculations to gradually adjust the particle set.
6) Calculate the mean and variance of the robot's
position estimation:
'
''
1
*
N
hii
i
x
wx
=
=
(19)
()
()
'
2
''
1
var *
N
hiih
i
x
wxx
=
=−
(20)
Among them,
h
x
represents the mean of robot
position estimation, and the
()
var
h
x
table represents
the variance of node position estimation.
The algorithm resampling and KL divergence
calculation are carried out in parallel, which can
determine whether resampling is necessary in a more
timely manner and reduce positioning delay.
Meanwhile, since the calculation of KL divergence is
performed before resampling, it is possible to
determine whether resampling is necessary before
resampling, avoiding unnecessary calculation time.
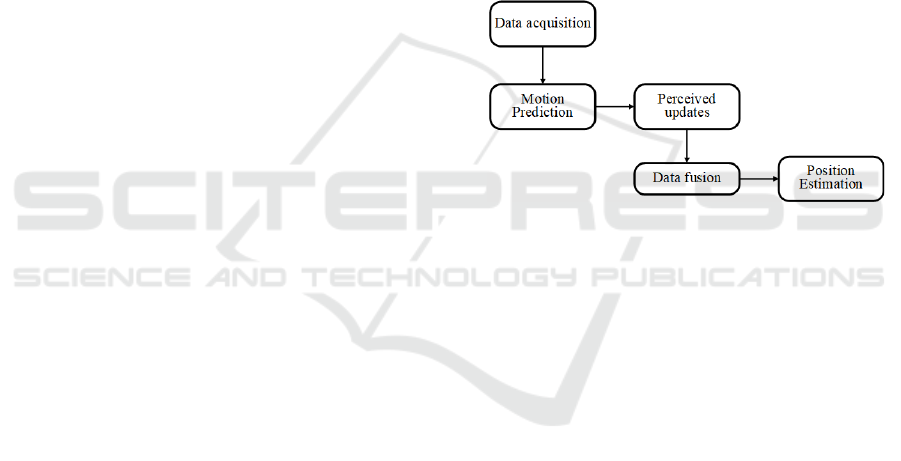
2.5 Improved AMCL Algorithm and
Multi-Sensor Fusion
Improved AMCL algorithm and multi-sensor fusion
steps:
Figure 2: Steps for Improving AMCL Algorithm and Multi
Sensor Fusion.
1) Data collection: Use an encoder to measure the
motion of robot wheels, in order to obtain the motion
model of the robot, including translation and rotation
information. At the same time, using LiDAR to
perceive the surrounding environment and obtain
environmental maps and obstacle information;
2) Motion prediction: Using encoder data to
predict the current position based on the robot's
motion model; Use LiDAR data for map matching
and particle filtering to obtain initial estimates of the
robot's position;
3) Perception update: Run steps 1 to 5 of the
resampling and KLD parallel AMCL algorithm every
time new LiDAR and encoder data is received to
obtain the estimated mean and variance of the
resampling particle set and robot position;
4) Data fusion: Using an extended Kalman filter,
the estimated values obtained from motion prediction
are combined with the measurement data of LiDAR
and encoder to obtain the final robot position
estimation result;
5) Output robot position estimation: Combining
the fused data, output the final robot position
estimation result, including the robot's position
Positioning Method of Four-Wheel Drive Robots Based on Multi-Sensor Fusion and Improved Adaptive Monte Carlo Algorithm
13
coordinates and corresponding uncertainty
information.
By utilizing the motion information of encoders
and the environmental perception of LiDAR through
multi-sensor fusion, the positioning accuracy and
robustness of robots have been greatly improved,
enabling them to calibrate and locate in complex
environments.
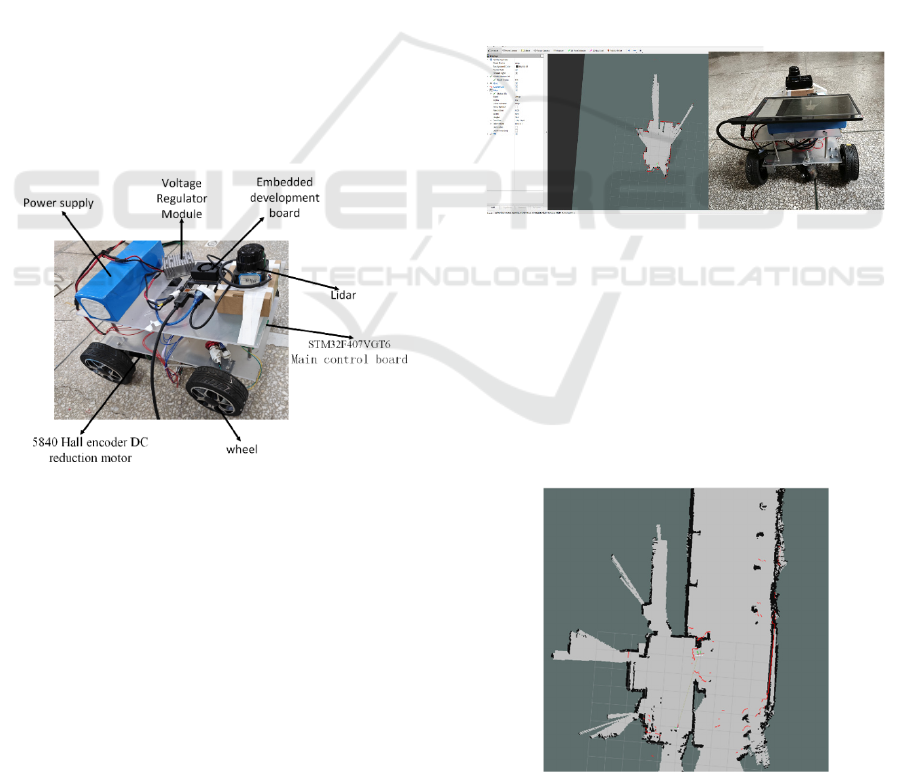
3 EXPERIMENTATION
3.1 Experimental Platform
The mobile robot selected for this experiment is
shown in Figure 3. The mobile robot is equipped with
a 5840 Hall encoder DC deceleration motor that can
provide high speed, a Silan S1 LiDAR, and a 24V15A
lithium battery. The lower computer uses the
STM32F407VGT6 main control board to control the
low-level operation of the robot, while the upper
computer uses the NVIDIA high-performance
embedded development board. Install Ubuntu 20.04
environment and ROS open-source robot operating
system on the upper computer.
Figure 3: Overall Structure of the Robot.
3.2 Robot Localization Based on
AMCL Fusion Algorithm
This article selects the ROS system, which provides a
large number of functional packages that can be used
to handle common tasks of robots, such as sensor data
processing, navigation, motion control, perception,
etc. ROS adopts a distributed architecture, allowing
multiple independent software modules (referred to
as nodes) to communicate through information
transmission. This distributed communication, where
each node is independent of each other, greatly
improves the system's fault tolerance and
maintainability.
In the ROS environment, build an environment
map using the open-source SLAM algorithm
Gmapping feature pack. The selection of the mapping
environment is relatively simple, and the road surface
is relatively flat on the external corridor of the
laboratory. Firstly, test whether the entire system is
running normally. After everything is normal, start
the low-level control program of the robot, open the
communication node and Gmapping mapping node,
and simultaneously start the rviz node for
environmental visualization and keyboard control
program. Control the robot's movement through a
remote keyboard to scan environmental information.
On the visualization interface of rviz, information
features of the surrounding environment can be seen.
After the robot completes a circle in the relevant
environment, it can complete map construction, as
shown in Figure 4.
Figure 4: SLAM Mapping Process.
After the map construction is completed, start the
map_ The server node saves the constructed map as a
two-dimensional grid map. The constructed two-
dimensional grid map is shown in Figure 5. During
the mapping process, the node continuously corrects
the robot's posture in the environment based on the
position estimation provided by the AMCL algorithm
and the information conveyed by sensors to ensure
the accuracy of map construction.
Figure 5: Built Grid Map.
DMEIS 2024 - The International Conference on Data Mining, E-Learning, and Information Systems
14

After the map construction is completed, start the
underlying communication nodes, navigation nodes,
and rviz visualization interface to assist in keyboard
control. After determining the initial position of the
robot, start setting navigation points on the map. The
process of setting navigation points is shown in
Figure 6.
Figure 6: Navigation Point Settings.
After completing the navigation point setting,
start the path planning node, and the robot will use
sensors such as LiDAR to start autonomous
navigation based on the node information. After
successful navigation, the window will prompt that
the node has been successfully reached, as shown in
Figure 7.
Figure 7: Robot Autonomous Navigation.
By comparing the error generated by using the
traditional AMCL algorithm for positioning, as
shown in Table 1, under the same environmental and
hardware conditions, using the traditional AMCL
algorithm for positioning resulted in a standard
deviation of 7.7cm, while using the algorithm
proposed in this paper resulted in a standard deviation
of 5.8cm.
Table 1: Positioning error statistics.
Positioning Method
Maximum
distance error
(cm)
Distance
standard
deviation
(
cm
)
AMCL 32.4 7.7
Proposed Method 14.7 5.8
4 CONCLUSIONS
In this paper, the mathematical models of AMCL
algorithm, stratified low variance sampling and KLD
sampling are analyzed. Based on the goal of reducing
algorithm computation time and improving algorithm
real-time performance, it is determined to adopt the
AMCL algorithm with parallel hierarchical low
variance resampling and KLD sampling. This
algorithm improves the positioning accuracy of the
ROS system during SLAM mapping, and when
applied to the autonomous navigation module, it
assists in positioning and also improves the efficiency
of path planning. Of course, most of the sensors used
in this article are two-dimensional sensors. If you
want to achieve three-dimensional positioning, you
need to add three-dimensional sensors such as
cameras and three-dimensional LiDAR to perform
positioning in a three-dimensional environment.
ACKNOWLEDGEMENTS
1) Research Project of China Disabled Persons'
Federation – on Assistive Technology:
2022CDPFAT-01.
2) Chongqing Urban Management Research
Project (Chengguan Kezi 2022 No. 34).
REFERENCES
Wang, N., Wang, J., Li, L., J., 2019. An improved AMCL
robot positioning method. Journal of Navigation and
Positioning, vol.07, no.03, pp. 31- 37, Tongfang
HowNet (Beijing) Technology Co., Ltd,
https://doi.org/10.16547/j.cnki.10- 1096.20190306.
Chen, M., Zhang, S., Miao, C. and Li, Y., J., 2023. Self-
recovery Monte Carlo localization algorithm.
Optoelectronics · Laser, vol.34, no.01, pp.43-51,
Tongfang HowNet (Beijing) Technology Co., Ltd,
https://doi.org/10.16136/j.joel.2023.01.0169.
Li, Y. and Wu, M., J., 2023. An improved localization
method for indoor robots based on ultrasound and
AMCL. Agricultural Equipment and Vehicle
Engineering, vol.61, no.06, pp.117-121146, Tongfang
HowNet (Beijing) Technology Co., Ltd,
https://doi.org/10.39696/j.issn.1673-3142.2023.06.024
Zhang, S., Li, Y., Zhang, T., J., 2022. AMCL localization
algorithm based on fast affine template matching.
Journal of Beijing University of Aeronautics and
Astronautics, vol.221, no.04, pp.1-10, Tongfang
HowNet (Beijing) Technology Co., Ltd, https://
doi.org/10.13700/j.bh.1001-5965.2022.0001.
Jiang, L., Nie, W., Zhu, J., Liu, Q., Tian, T., Li, J., J., 2022.
Improved AMCL Relocation Algorithm Based on
Positioning Method of Four-Wheel Drive Robots Based on Multi-Sensor Fusion and Improved Adaptive Monte Carlo Algorithm
15

Semantic Maps with Corner Information. Journal of
Mechanical Engineering, vol.58, no.24, pp.312-323,
Tongfang HowNet (Beijing) Technology Co., Ltd,
https://doi.org/10.3901/JME.2022.24.312.
Feng, J., Pei, D., Zou, Y., Zhang, B. and Ding, P., J., 2021.
An Improved AMCL Algorithm Based on Robot
Laser Localization. Progress in Laser and
Optoelectronics, vol.58, no.20, pp.1-9, Tongfang
HowNet (Beijing) Technology Co., Ltd,
https://doi.org/10.3788/LOP202158.28003.
Wang, Z., Yan, B., Dong, M., Wang, J. and Sun, P., J.,
2022. A Wall Climbing Robot Positioning Method
Based on LiDAR and Improved AMCL. Journal of
Instrumentation, vol.43, no.12, pp.220-227, Tongfang
HowNet (Beijing) Technology Co., Ltd, https://doi.org
/10.19650/j.cnki.cjsi.J2210261.
Yuan, Q., Tian, X., Shen, S., J., 2022. Mobile robot
localization based on multi-sensor fusion. Computer
System Applications, vol.31, no.03, pp.136-142,
Tongfang HowNet (Beijing) Technology Co., Ltd,
https://doi.org/10.15888/j.cnki.csa.008390.
Yang, J., Lin, R., Wang, Z., Sun, L., J., 2016. Research
and Design of Motion Control Systems for Wheeled
Mobile Robots. Modern Electronic Technology, vol.39,
no.02, pp.22-27, Tongfang HowNet (Beijing)
Technology Co., Ltd, https://doi.org/10.16652/
j.issn.1004373x.2016.02.007.
Ren, P. and Li, W., J., 2021. Mobile robot localization
based on improved visual mileage calculation method.
Automation and Instrumentation, vol.36, no.07, pp.32-
37,63, Tongfang HowNet (Beijing) Technology Co.,
Ltd, https://doi.org/10.19557/j.cnki.1001-
9944.2021.07.006.
Zhou, X., Wu, T., Li, B. and Sun, J., J., 2022. Research on
four-wheel drive mobile robots based on ROS and PX4
flight control. Modern Electronic Technology, vol.45,
no.20, pp.177-182, Tongfang HowNet (Beijing)
Technology Co., Ltd, https://doi.org/10.
16652/j.issn.1004373x.2022.20.035.
DMEIS 2024 - The International Conference on Data Mining, E-Learning, and Information Systems
16
