
A Framework for Intelligent Virtual Reality Tutoring System Using
Semantic Web Technology
Victor Häfner
a
, Tengyu Li
∗ b
, Felix Longge Michels
c
, Polina Häfner
d
, Haoran Yu
and Jivka Ovtcharova
Institute for Information Management in Engineering (IMI), Karlsruhe Institute of Technology (KIT), Karlsruhe, Germany
Keywords:
Virtual Reality Training, Personalized Tutoring, Semantic Web Technology, Intelligent Tutoring System,
Engineering Education, Virtual Flow Rig Training.
Abstract:
Adaptive and personalized immersive virtual reality (VR) training is a current research focus, aiming to make
training more efficient and let users have a better learning experience. But there is currently an unmet need for
flexible VR training that can adapt to the user’s abilities and performance to provide a personalized learning
process. The main problem is the high cost of setting up and maintaining virtual environments, resulting in
a lack of flexibility to easily update training content. To solve this problem, we incorporate Semantic Web
technology into VR training. Using the heterogeneous knowledge integration and reasoning capabilities of the
Semantic Web, VR training content can be easily created and updated. In addition, due to the advantages of
the intelligent tutoring system (ITS) in tracking the student performance and providing automated and person-
alized tutoring, we explore the integration of the ITS into the VR learning environment. Therefore, this paper
proposes a framework for a Semantic Web-Enabled Intelligent VR Tutoring System, especially for engineer-
ing education, and demonstrates its feasibility by a proof of concept application. The system is exemplified
using a virtual flow rig application for training, facilitating the education of students and professionals on fluid
flow principles, control strategies, and measurement techniques.
1 INTRODUCTION
With the emergence of consumer hardware of im-
mersive virtual reality (VR), the application range
of VR technology continues to expand, involving
many fields such as education, training and enter-
tainment (Häfner, 2020; Zahabi and Abdul Razak,
2020). Among them, the application of VR in the
field of training has attracted much attention. It can
simulate expensive or dangerous scenarios, thereby
reducing the cost of training, eliminating risks for
trainees, and greatly improving the flexibility of train-
ing in time and location (Ruthenbeck and Reynolds,
2015). In addition, immersive and contextual experi-
ences provide the best basis for understanding knowl-
edge and skills (Dale, 1969). Due to the significant
advantages of VR training, it has been widely used
in industry (Richard et al., 2021b), medical (Vaughan
a
https://orcid.org/0000-0001-8682-1122
b
https://orcid.org/0009-0008-8174-1009
c
https://orcid.org/0000-0001-6533-4886
d
https://orcid.org/0000-0003-4534-351X
∗
Corresponding author
et al., 2016), military (Bhagat et al., 2016), construc-
tion (Schiavi et al., 2021) and other fields. In order to
make VR training more effective, current research fo-
cuses on adaptation and personalization in VR train-
ing, and many achievements have been made (Zahabi
and Abdul Razak, 2020). The U.S. National Academy
of Engineering (U.S. National Academy of Engineer-
ing, 2017) has also listed “Enhancing Virtual Real-
ity” and “Advancing Personalized Learning" among
the major challenges in Engineering in the 21st cen-
tury. Nonetheless, there is an unmet need for flexi-
ble VR training that can adapt to the user’s abilities
and performance to provide a personalized learning
process. This is because most studies concentrate on
the adaptation of features or their combinations in a
given training scenario (such as display features, con-
trolled elements, difficulty level determined by other
features, etc.) (Zahabi and Abdul Razak, 2020), and
pay less attention to the adaptation of training con-
tent. The main problem is the high cost of setting
up and maintaining virtual environments, resulting in
a lack of flexibility to easily update training content.
To address this problem, it is promising to utilize Se-
Häfner, V., Li, T., Michels, F., Häfner, P., Yu, H. and Ovtcharova, J.
A Framework for Intelligent Virtual Reality Tutoring System Using Semantic Web Technology.
DOI: 10.5220/0012746400003693
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Computer Supported Education (CSEDU 2024) - Volume 2, pages 141-152
ISBN: 978-989-758-697-2; ISSN: 2184-5026
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
141

mantic Web technology to facilitate ontology-driven
VR training. Ontologies can support the integration
and management of heterogeneous knowledge such
as virtual three-dimensional (3D) scenes, interactions
and tasks (Benferdia et al., 2021). Once implemented,
the training content can be easily created and updated
with the support of the reasoner. However, there are
few literatures on this aspect at present. An Intelli-
gent Tutoring System (ITS) is a computer-based tutor-
ing agent engineered to track and analyze a “student
model", which encompasses the student’s progress,
performance, and learning patterns. The primary ob-
jective of an ITS is to provide automated and per-
sonalized tutoring, comprising task selection, error
detection and rectification, step guidance, and other
adaptive learning approaches (Häfner, 2021; Herbert
et al., 2018). Integrating Intelligent Tutoring Systems
(ITSs) into VR learning environments represents an
emerging research field, yet the extent of exploration
to date remains limited (Laine et al., 2022). As a re-
sponse to this gap, we propose the concept of a Se-
mantic Web-Enabled Intelligent VR Tutoring System,
a fusion of Semantic Web technology, ITS, and VR
training applications. Semantic Web technology, an
artificial intelligence (AI) approach based on knowl-
edge representation, offers an alternative pathway to
implement an ITS. Hence, the integration of these
three components is viable, and currently, there exists
no established framework to describe such a compre-
hensive system.
In view of the above development trends and chal-
lenges of VR training, this paper proposes a frame-
work of Semantic Web-Enabled Intelligent VR Tutor-
ing System. To illustrate its practical application, we
specifically focus on the development of an intelligent
VR tutoring system for a flow rig. The flow rig is a
valuable tool utilized extensively in research, experi-
mentation, analysis, testing, and validation within en-
gineering, fluid dynamics, thermodynamics, and re-
lated domains. While the flow rig serves a wide
array of applications, our particular emphasis is on
its pivotal role in education and the creation of VR
training application to showcase its effectiveness in
teaching control principles, methods, and operational
procedures for fundamental process parameters such
as flow rate, level, volume, and differential pressure
within piping systems. The application caters to a di-
verse range of users including students in educational
settings, vocational training programs, sales and tech-
nical support personnel, as well as professionals seek-
ing continuing education and research and develop-
ment teams in engineering and manufacturing indus-
tries. The flow rig use case serves as an example train-
ing application and a proof of concept for the pro-
posed framework. The implementation methods of
the three core modules within the framework are de-
tailed, aiming to provide readers with a clear under-
standing of the system’s functionality and potential.
Among them, in the implementation of immersive VR
learning environment, we focus on the high-fidelity
simulation of complex machines in the field of me-
chanical engineering. Furthermore, we point out the
need and importance of automating the virtualization
process of machines, aiming to facilitate further the
process of creation of immersive VR trainings.
The subsequent sections of this paper are outlined
as follows. In Section 2, we present a comprehensive
review of related research. Section 3 elaborates on
the framework of the proposed ITS system. Follow-
ing that, Section 4 provides an introduction to the im-
plementation approaches for the three core modules.
Finally, in Section 5, we summarize the paper and of-
fer insights into potential avenues for future research.
2 RELATED WORK
Here, we mainly review the prior work on the appli-
cation of Semantic Web technology in virtual train-
ing and ITSs. Due to the advantages of the Semantic
Web in knowledge representation, integration, shar-
ing, reuse, reasoning, etc., there is growing interest in
using the Semantic Web in virtual training. Häfner
(Häfner, 2017) pointed out that connecting the virtual
world with semantic models to build a smart virtual
environment has great prospects for training applica-
tions, especially in the engineering field. Walczak
et al. (Walczak et al., 2020) proposed an ontology-
based semantic modeling method for VR training sce-
narios, and developed a scenario editor based on this
method, which supports users without advanced pro-
gramming and modeling skills to easily create train-
ing scenarios. Elenius et al. (Elenius et al., 2016)
proposed a framework for users to interact with vir-
tual environments based on ontologies and rules, and
applied it to the training of weapon skills. Filho et
al. (Filho and Vieira, 2014; Filho et al., 2015) used
an ontology approach to facilitate the development of
virtual scenarios in a training simulator for the op-
eration of electrical systems. Havard et al. (Havard
et al., 2017) proposed an industrial ontology describ-
ing operational guidelines for integration with infor-
mation systems. Gorecky et al. (Gorecky et al., 2014;
Gorecky et al., 2017) used an ontology-based seman-
tic modeling method to solve the integration problem
of heterogeneous data in order to promote the existing
enterprise data (such as production line structure, pro-
cess description, etc.) to be used in the setting of vir-
CSEDU 2024 - 16th International Conference on Computer Supported Education
142
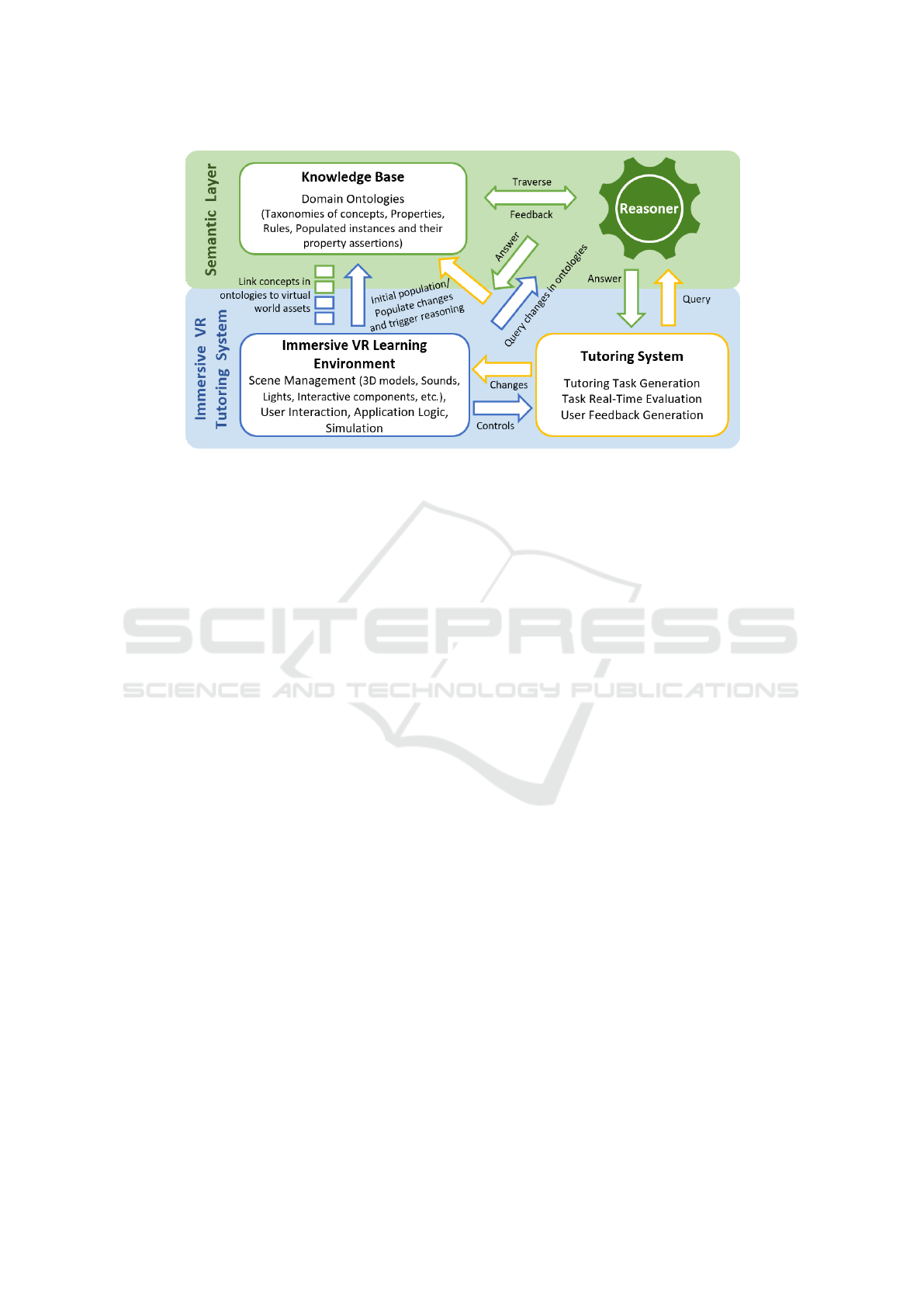
Figure 1: Framework of the Semantic Web-Enabled Intelligent VR Tutoring System (adapted from (Häfner, 2021)).
tual training scenarios. It can be seen that most studies
use Semantic Web technology to solve the problems
of scenario creation and heterogeneous knowledge in-
tegration in virtual training, while few studies focus
on how to use Semantic Web to drive the VR training
process, including user interaction, training content
update, and evaluation.
Some achievements have also been made in the
application of Semantic Web in ITS. Chang et al.
(Chang et al., 2020) used ontology to build a tutor-
ing model in an ITS, and explored the use of data
mining technology to accelerate this process. Jac-
into and Oliveira (Jacinto and Oliveira, 2008) pre-
sented an architecture of an ITS based on multiple on-
tologies. Muñoz Merino and Kloos (Muñoz Merino
and Kloos, 2008) combined the ITS with Semantic
Web technology to provide students with personal-
ized prompts adaptively. Vesin et al. (Vesin et al.,
2012) used semantic reasoning to identify students’
learning styles and recommend personalized courses
for students. Wen et al. (Wen et al., 2022) devel-
oped an ontology-driven dialogue-based ITS. How-
ever, few studies have explored the combination of
Semantic Web, ITS and VR training.
3 FRAMEWORK OVERVIEW
The framework of the Semantic Web-enabled intelli-
gent VR tutoring system is shown in Figure 1. The
whole is divided into three core modules, namely the
semantic layer, the immersive VR learning environ-
ment and the tutoring system.
The semantic layer is a module that provides in-
telligence based on Semantic Web technology. It
includes an ontology-based knowledge base and a
reasoner. The ontology defines the data model of
the knowledge base (Häfner et al., 2013; Wicaksono
et al., 2013), which includes several small ontologies
for different domains describing the virtual world,
user interactions and tutoring situations, such as the
ontology characterizing the state of the visual interac-
tive object like machine virtual twin ontology, student
behavior ontology, tutoring task ontology, student
skill ontology, etc. These ontologies are comprised
of domain-related concept (class) taxonomies, prop-
erties, reasoning rules, concept instances and their
property assertions. Concepts from different ontolo-
gies are linked to each other through rules. Virtual
world assets are linked to the corresponding concepts.
In the stage of system initialization, relevant object
instances are generated according to the initial train-
ing requirements and populate the knowledge base,
such as specific virtual scene instances, initial state
parameter instances for both the user and the sys-
tem, tutoring task instances, among other relevant el-
ements. During the tutoring phase, the system con-
tinuously adds or updates instances in the knowledge
base in reaction to changes within the VR environ-
ment and tutoring system, like populating user behav-
ior instances, updating tasks or virtual scenes, and so
on. The semantic layer tracks the knowledge of the
virtual learning environment and the user in real time,
which is very important for the dynamic update of the
visual scene and the function implementation of the
tutoring system.
Reasoner is a module in the semantic layer that
implements intelligence. It engages in automatic rea-
soning and logical deduction using ontology rules
to derive new knowledge from the existing knowl-
A Framework for Intelligent Virtual Reality Tutoring System Using Semantic Web Technology
143

edge within the knowledge base, ultimately facilitat-
ing decision-making and query responses. Scenar-
ios that trigger the reasoner include user interactions
with the virtual scene and queries from the application
logic in the VR environment or the tutoring system.
The reasoner uses predefined ontology rules to infer
the changes that should be made in the virtual world
based on the user interactions and their interpreted be-
haviors, or to execute prescribed tutoring actions. The
inference results are reflected as modifications to the
instance information in the knowledge base. The rea-
soner cannot directly change the virtual world, which
requires the application logic to achieve it. Therefore,
the application logic should send queries to the rea-
soner to learn about changes in the knowledge base.
In addition, the tutoring system can also issue queries
to the reasoner to check the progress of task execu-
tion, the user’s wrong behavior, or the improvement
of the user’s skills, etc. The reasoner will traverse all
the knowledge of the virtual world and the user in the
knowledge base, and make corresponding feedback
based on all relevant rules.
The primary roles of the tutoring system are to
generate tutoring tasks, evaluate tasks in real time,
and generate user feedback. These three functions are
implemented via interacting with the semantic layer,
which will be described in detail in Section 4.3. The
results produced by the tutoring system will change
the virtual environment, for example, changes in tasks
may affect changes in the virtual scene, and user feed-
back is visually presented in real time on the graph-
ical interface. In addition, in order to give users the
option to control their own learning, it is also neces-
sary to design an interactive interface for the tutoring
system in the virtual environment.
The immersive VR learning environment consists
of scene management, simulations, user interaction
and application logic. A virtual scene encompasses
assets such as 3D models, materials, textures and
sounds, as well as artefacts like virtual cameras, lights
and virtual sound sources. The arrangement of these
virtual assets and their topological relationships can
be managed using a hierarchical structure diagram.
In each frame, the hierarchical structure diagram is
traversed to compute the transformation of the vir-
tual world. Simulations are approximations of var-
ious behaviors in the real world, and are also the
core of building an immersive VR learning environ-
ment. Usually, VR engines have been embedded with
physics engines to simulate the basic physical behav-
ior of objects, such as collisions, gravity, vehicle dy-
namics, and so on. User interaction, a key character-
istic of immersive VR applications, depends on the
user behavior and the choice of interactive devices.
Users can virtually select, grab, and move virtual ob-
jects, as well as implement different navigation modes
as needed. Additionally, the realistic manipulation of
virtual objects can be realized through the simulation
of physical reactions of these objects like deforma-
tions and the implementation of force feedback. Fi-
nally, developers should add application logic to the
virtual assets as needed to implement the necessary
actions in the virtual environment. The application
logic is programmatically created using scripting lan-
guages. Within this ITS system framework, an impor-
tant function that the application logic should perform
is to populate various instance data into the seman-
tic layer during system initialization and run-time. In
addition, the application logic is also responsible for
dynamically generating some ontology rules, issuing
queries, and activating the reasoner.
In the following sections, we will provide a de-
tailed description of the implementation of the three
core modules of this system.
4 IMPLEMENTATION
4.1 Concept of Automating the
Virtualization to Build up Machine
Virtual Twins
The core and difficulty of constructing an immersive
VR learning environment is the simulation of the real
world. Since our long-term work focuses on VR ap-
plications in the field of mechanical engineering, this
section mainly discusses the simulation of real ma-
chines in the VR environment, which will be used for
virtual training of machines.
The virtual twin of a machine is its virtual rep-
resentation, which includes all dynamic and func-
tional aspects (Häfner, 2019). The creation of the
virtual twin involves knowledge from multiple do-
mains, such as mechanical, electrical, and machine
programming. Integrating planning data from vari-
ous domains to generate an interactive virtual twin
with realistic machine behavior is highly complex,
time-consuming, and resource-consuming. Auto-
matic aggregation of overall knowledge from plan-
ning data is desired, in particular automatic asso-
ciation of component data in Electrical Computer-
Aided Design (ECAD) and Mechanical Computer-
Aided Design (MCAD) (Michels and Häfner, 2022;
Häfner et al., 2020). On the other hand, if the seman-
tic information required for the simulation of kine-
matics, dynamics, hydrodynamics, etc. is lacking in
the MCAD data, then this information should be de-
CSEDU 2024 - 16th International Conference on Computer Supported Education
144
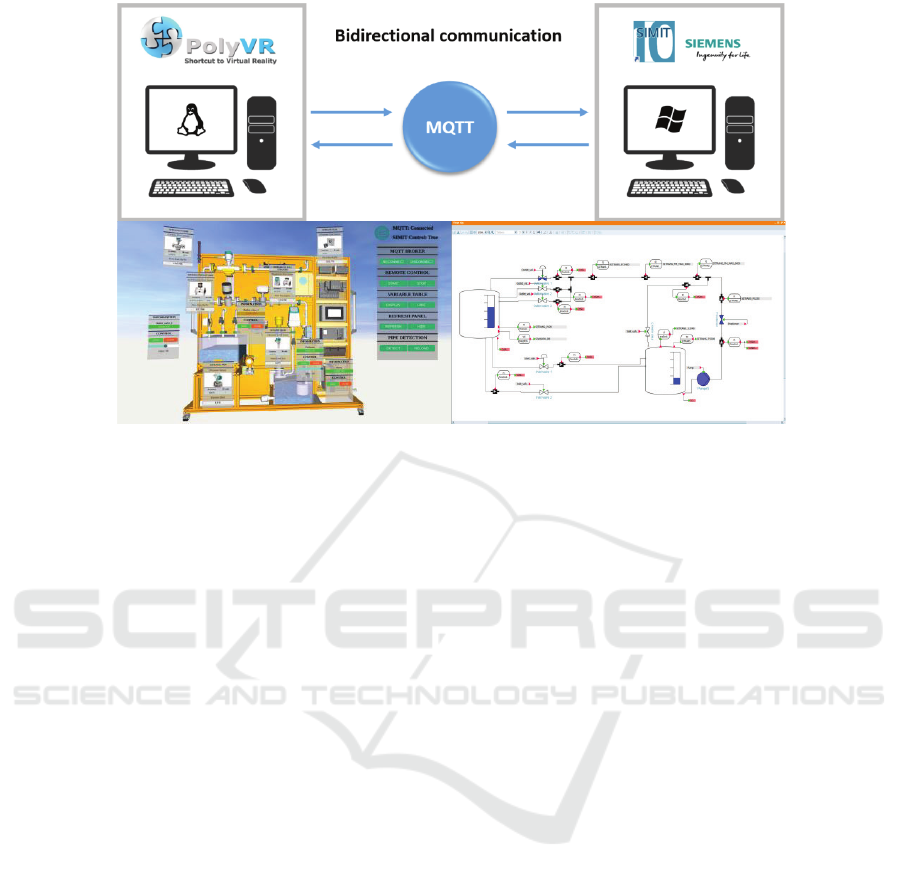
Figure 2: Architecture of flow rig virtual twin.
termined elsewhere. The development of automatic
analysis algorithms for geometric objects helps to
quickly capture as much inherent knowledge as pos-
sible from MCAD data to support parameter settings
for various simulations. Specifically, the choice of
the first data source in the virtualization process often
comes to MCAD data as the entry point. These ge-
ometries are often exported from native engineering
software tools in the exchange format STEP, which
is the status quo due to its general compatibility with
other Computer-Aided Design (CAD) software ven-
dors. The exports lack further semantic information,
which either is stored in the native design tool and
cannot be exchanged digitally or rests in the non-
digital knowledge of the engineers and domain ex-
perts. This semantic data can be for example me-
chanical relevant data such as rotation axis, radius and
pitch of gears for the calculation of ratios in gearboxes
to virtually generate a kinematic chain for the kine-
matic simulation (Michels and Häfner, 2022) or pipe
parameters for generating a flow simulation, as shown
in the example of flow rig below. Another regular
difficulty with MCAD data exports is the inconsis-
tent data quality, depending on the CAD system and
the modelling methods used by the construction en-
gineer. It may be that the product structure is bad,
lacking meaningful groups of parts into assemblies.
For complex machines, it is more urgent to realize the
automation of MCAD data structure optimization.
The automated virtualization process forms the
foundation for expediting the implementation of di-
verse virtual engineering applications, including but
not limited to machine training, virtual commission-
ing, material flow simulation, and more (Michels and
Häfner, 2022; Häfner et al., 2020). This approach
holds significant promise and potential to streamline
the authoring process of immersive learning applica-
tions. Furthermore, embedding the semantic layer in
the virtual environment not only helps integrate the
heterogeneous data needed to build a virtual twin, but
also paves the way for the automatic parameteriza-
tion of the simulation model by linking semantic in-
formation to virtual 3D assets, as well as expanding
the range of possibilities for machine behavior simu-
lation and user interaction options.
Let’s take the VR tutoring system for a specific
flow rig, which we are currently working on, as an
illustrative example to further elucidate our concept.
During the creation of a flow rig virtual twin, the pre-
existing MCAD data was directly imported and de-
ployed, while the system simulation for the hydrody-
namics was coupled through the externally running
simulation tool. In order to save the time and cost of
creating the virtual twin, the existing SIMIT simula-
tion was combined with the MCAD model to obtain
an interactive virtual twin of the flow rig, as shown
in Figure 2. The software SIMIT from SIEMENS is
a simulation environment used for simulating the be-
havior of the flow rig, as shown on the right side of
Figure 2. The virtual scene of the flow rig was gen-
erated in PolyVR, an open-source VR authoring soft-
ware (Häfner, 2019), as shown on the left side of Fig-
ure 2. The communication between the virtual scene
running and the hydrodynamic simulation was facili-
tated via MQTT (OASIS Standard, 2015), a well es-
tablished protocol for Industry 4.0 applications. Over
A Framework for Intelligent Virtual Reality Tutoring System Using Semantic Web Technology
145

this MQTT interface we sent sensor data such as flow
rate, or tank level towards the virtual twin as well as
action commands input from the user for individual
valves and pumps towards SIMIT. One of the typical
issues we encountered was that in the MCAD data,
the scene graph generated from the product tree ex-
hibited a flat structure without any hierarchical group
concepts and the names of components were missing.
A lack of semantic information to identify the com-
ponents makes it difficult to map MCAD components
to the SIMIT simulation model, which is necessary
for visualizing and interacting with the virtual flow
rig. To solve this problem, it is necessary to clas-
sify the components of the piping system and identify
their topological position to map them to the simula-
tion model. Moreover, for pipes, in addition to their
type, semantic information such as length and inner
radius are particularly important for their parametric
simulation and analysis of flow characteristics such
as throughput or pressure loss due to friction. Finally,
we adopted a geometric analysis method to realize the
classification of the components and the extraction of
the basic pipe parameters, and further implemented
the automatic generation of the piping system topol-
ogy. Since this part is not the focus of this paper, the
specific classification implementation method will not
be covered in detail here.
4.2 Implementation of the Semantic
Layer
Here, we give the general procedure for implementing
the semantic layer, as shown in Figure 3. Ontology
design is subjective, which means that the ontology
designed by different developers has different defini-
tions of concepts and properties. A good ontology
taxonomy should be intuitive, and its internal rela-
tionships should be easy to grasp and explore (Häfner,
2019). In order to standardize the ontology design as
much as possible to facilitate the subsequent merging
and mapping of different ontologies, the guidelines
proposed by Häfner (Häfner, 2021) can be referred to.
The Web Ontology Language (OWL) is a prominent
ontology description language, widely utilized in var-
ious domains. Specifically, OWL ontologies can be
effectively modeled using tools like Protégé, an open-
source graphical ontology development tool that sig-
nificantly simplifies the process, enhancing accessi-
bility for researchers and practitioners (Musen, 2015).
In addition, the tool has a built-in reasoner, whose
main function is to infer the hierarchical structure of
classes, i.e. concepts, and to check the consistency of
ontologies in the design phase.
Analyzing and determining all the domains
Figure 3: General procedure for implementing the semantic
layer (adapted from (Häfner, 2021)).
needed to implement the tutoring system is the
premise of constructing ontologies in the semantic
layer, and it is also the first step in constructing the
semantic layer. This paper takes the intelligent VR
tutoring system of the flow rig mentioned in the previ-
ous section as an example, and briefly analyzes which
domain ontologies are required for its semantic layer.
First, the content and objectives of the tutoring should
be clearly defined. While the flow rig is a versatile
tool with applications in research, experimentation,
analysis, testing, and validation across engineering,
fluid dynamics, thermodynamics, and more, its pri-
mary function remains in education. It helps teach
students the control principles and methods of basic
process parameters such as flow rate, level, volume
and differential pressure in the piping system, as well
as the operation methods of common control com-
ponents, equipment and measuring instruments, such
as the starting steps of the pump, the measurement
method of the flow meter, etc. More complexly, it can
be used to teach the setting of a single closed-loop
level/flow control system, the test method of the step
response characteristics of the tank level, and the test
method of the flow characteristics of the valve, etc.
This type of learning is called skill training. The vast
majority of skill training tasks for machines are pro-
cedural, which means that the task can be represented
as an ordered sequence of behaviors or actions.
Therefore, based on the above analysis and the
content of the preceding sections, we preliminarily
concluded that the semantic layer of the ITS ought
CSEDU 2024 - 16th International Conference on Computer Supported Education
146
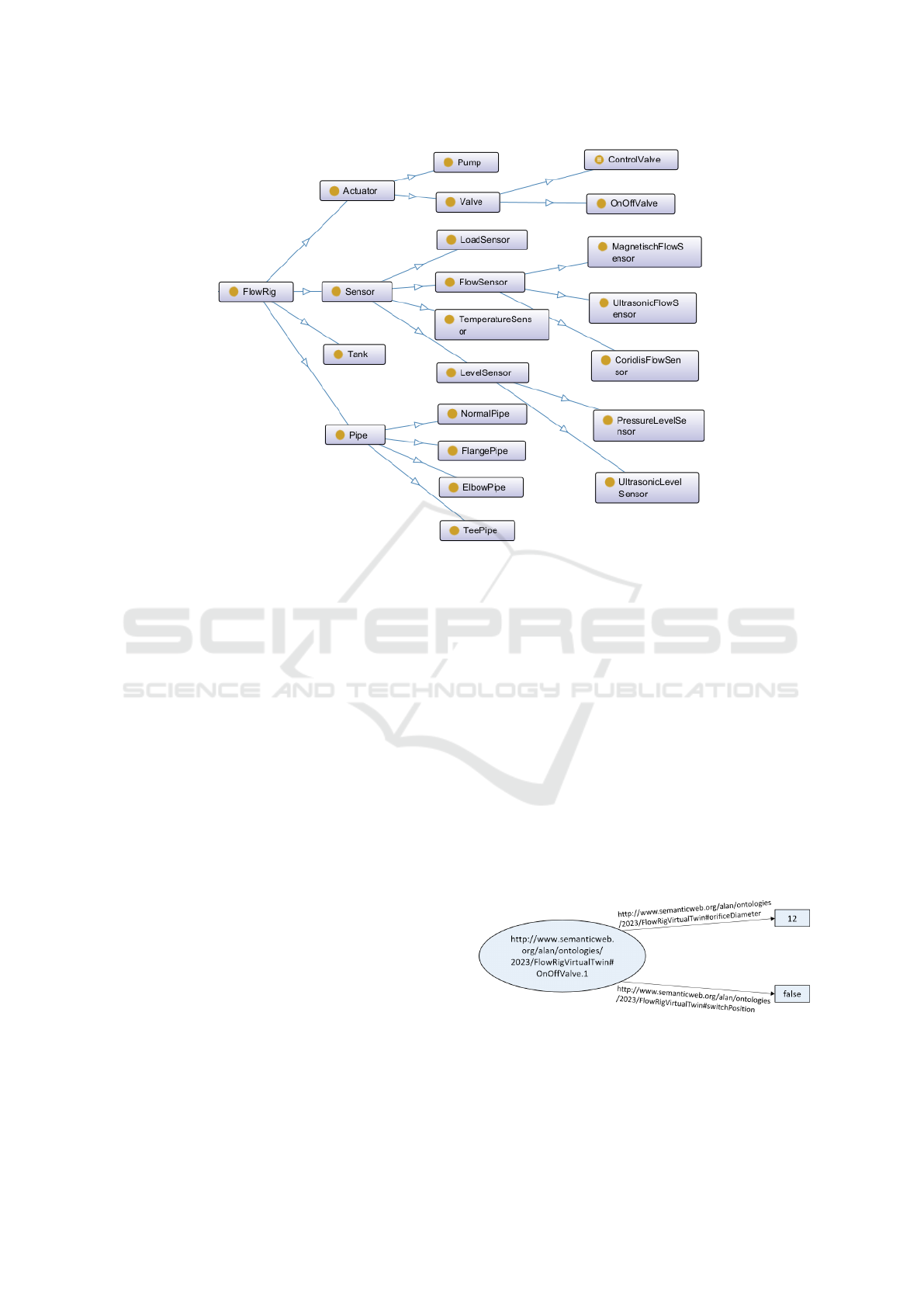
Figure 4: Flow rig virtual twin ontology.
to comprise four key domain ontologies. First among
these is the virtual twin ontology, serving to elucidate
information about each component within the flow rig
and the interrelationships between these components.
The second is the behavior ontology, describing the
interactions available to students, along with the cor-
responding execution rules for these interactions on
the virtual twin components. The third, the tutor-
ing task ontology, is used to describe the procedural
task content, task evaluation and user feedback con-
tent. Lastly, there is a skill ontology, responsible for
recording the learning intensity and mastery of vari-
ous skills, which is used to support the adaptive gen-
eration of tutoring tasks.
The component class hierarchy defined in the flow
rig virtual twin ontology is shown in Figure 4. Define
a set of properties for each component class, which
can be divided into static properties to record basic
component parameters such as the volume of the tank,
the orifice diameter of the valve, etc., and dynamic
properties to capture the current state of the compo-
nent such as the opening degree of the valve, the level
of the tank, etc. In the system initialization stage, the
component instances of the flow rig virtual twin es-
tablished in the previous section and their initial se-
mantic information are populated into the virtual twin
ontology knowledge base, where the basic structure
of representing facts is a triple based on Resource De-
scription Framework (RDF), that is, the format of sub-
ject (instance of class) - predicate (property of class)
- object (property value) (Pan, 2009). Take the on-off
valve class as an example, which includes the orifice
diameter property and the switch position property to
indicate the state of the on-off valve. Their range
classes are Decimal class and Boolean class respec-
tively. After system initialization, several fact asser-
tions about specific on-off valves will be generated in
the knowledge base. Take one of them as an example
and use the RDF graph to represent it as shown in Fig-
ure 5. Each entity in the ontology (including classes,
properties, and instances) has a unique International-
ized Resource Identifier (IRI) used for reference pur-
poses. After mapping the flow rig virtual twin to the
ontology, an automatic parametric simulation model
is formed. Driven by the reasoner and behavior ontol-
ogy rules, the flow rig virtual twin enables automatic
responses to user interactions.
Figure 5: RDF graph describing the on-off valve instance
OnOffValve.1.
The purpose of constructing the behavior ontology
is, on the one hand, to endow the basic interface inter-
A Framework for Intelligent Virtual Reality Tutoring System Using Semantic Web Technology
147

action between users and objects (such as click, drag
and drop, etc.) with specific semantics, which helps
the tutoring system meaningfully understand user be-
havior and make evaluations, and on the other hand, to
realize the impact of user behavior on the virtual en-
vironment by using ontology rules. In addition, there
may be more than one semantic operation that can be
performed on an object, which should be explicitly
presented and chosen by the user when manipulating
the object. For example, when operating the pump of
the flow rig, in addition to the operation to start the
pump, it should also include the operation to check
the submergence degree of the pump, which should
be performed before starting the pump. By classify-
ing various object operations, we consider construct-
ing a behavior ontology composed of general behav-
ior classes and object-specific behavior classes. The
definition of general behavior classes helps the be-
havior ontology to be reused in other machine train-
ing, as well as to keep the ontology simple. Gen-
eral behaviors include: Open, Close, Adjust, Press,
Check, Record, etc. The object-specific behavior can
be adding water to the tank, checking the submer-
gence depth of the pump, etc. Based on the needs
of rule reasoning, define a set of properties for the
behavior class to capture information associated with
the behavior instance. For example, the Open class
has an openedObject property, whose value can be a
certain on-off valve or the pump; in addition to having
an adjustedObject property, the Adjust class should
also have a value property that records the final value
of the adjustment, such as the opening adjustment of
the control valve. When the user performs a behav-
ior on a component object of the virtual twin, a new
behavior instance and its property assertions will be
created, which will be populated into the knowledge
base in the form of RDF triples. Finally, the ontology
rules describe the effects of different behaviors on the
virtual twin. Ontology rules are also a kind of for-
malized knowledge in essence, which is represented
based on if-then logic. Semantic Web Rule Language
(SWRL) (Horrocks et al., 2004) is used to model on-
tology rules. Taking the adjustment of the control
valve as an example, the behavior rule is modeled as
follows:
• adjustedObject(adjustInstance, ?cv)^
value(adjustInstance, ?val)^
openingDegree(?cv, ?opd)^
swrlb:notEqual(?val, ?opd)->
openingDegree(?cv, ?val)
The prerequisite for the above rule to be true is
that the expression on the left side of the arrow “->”,
that is, the if statement, is true. The part on the right
side of the arrow represents the result of the rule, that
is, the then statement. While generating an instance
of the Adjust class (in this case replacing the instance
name with the parameter adjustInstance), the above
rule is created dynamically and the reasoner is trig-
gered to reason based on the rule. The symbol “^”
represents the logical operation “and”, linking mul-
tiple subexpressions. The expressions adjustedOb-
ject, value, and openingDegree are all property ex-
pressions. Their first parameter represents the indi-
vidual being tested, and the second parameter repre-
sents the property value of the individual. The SWRL
syntax uses the form of a question mark plus a char-
acter to represent a wildcard, which is used to dy-
namically bind each property value of the individual.
The swrlb:notEqual is a built-in function of SWRL
to determine whether two parameters are unequal.
On the result side of the rule, the property expres-
sion openingDegree is used as a property assertion
to set the openingDegree property value of the indi-
vidual bound to the first argument (that is, the control
valve) to the value bound to the second argument (that
is, the adjusted value of the Adjust behavior). Due
to the monotonic reasoning characteristics of SWRL,
SWRL rules can only add new reasoning informa-
tion to the ontology but cannot modify the existing
information of the ontology. Therefore, SPARQL,
short for “SPARQL Protocol and RDF Query Lan-
guage”(World Wide Web Consortium, 2013) can be
used to delete old axioms. The overall meaning of this
behavior rule is that if the user’s adjustment behavior
does change the opening degree of the control valve,
then update the value of the opening degree property
of the control valve in the virtual twin ontology. Once
the application logic learns through queries that the
information in the virtual twin ontology has changed,
it will re-run the flow rig parametric simulation model
to update the virtual environment.
The details and functions of the other two ontolo-
gies will be explained in conjunction with the content
of the next section.
4.3 Intelligent Tutoring System
This section summarizes specific requirements for
setting up an ITS and delivers some insights into their
realization. As mentioned in Section 3, in our pro-
posed framework, the functions of an ITS mainly in-
clude generating tutoring tasks, evaluating tasks in
real time, and generating user feedback. These three
functional modules are described in turn as follows.
First, for the tutoring task generation module, it
should be able to adaptively generate the most suit-
able tutoring task considering the student’s skill level,
proficiency in skills and forgetting curve. In order
to evaluate the skill level of the students, a simple
CSEDU 2024 - 16th International Conference on Computer Supported Education
148
method is proposed, which is to divide the skills re-
quired by students into different levels through a top-
down analysis. The learning of a higher-level skill is
based on the mastery of all lower-level skills. Taking
the training of the flow rig as an example, the premise
for students to learn process parameter control strate-
gies is that they have been able to skillfully operate
various control components, equipment and measur-
ing instruments. With this approach, a student’s skill
level can be obtained by analyzing his learning situ-
ation of all tasks at each level, which is recorded in
the user profile. As long as there are tasks at a certain
level that are not fully mastered, meaning that the stu-
dent is still at that skill level, new tasks generated by
the tutoring system should also be at that level. The
tasks generated based on the student’s skill level pre-
vent students from being frustrated by the excessive
burden during the training process or losing interest
in learning due to tasks that are too easy.
For the evaluation of skill proficiency, it can be
realized by formulating a user performance-based
penalty rule, and taking the task score obtained based
on the rule as the user proficiency of the skill cor-
responding to the task. The user’s score for each
task will be updated in the user profile. The tutor-
ing system learns the user’s proficiency in each skill
by checking the latest scores for each task. A full
score means complete mastery. In addition, the tutor-
ing system should also consider the forgetting curve
of knowledge when generating tasks, that is, con-
sider the time factor. Periodically repeating tasks
with perfect proficiency and re-evaluating the user’s
skill performance can effectively combat the forget-
ting curve. Therefore, the learning intensity of each
skill expressed as the learning interval should also be
recorded in the user profile and updated regularly.
It should be noted that all the tasks that the tu-
toring system can provide, and their corresponding
scenes, should be defined in advance in the underlying
data model of the task generation module. A task se-
lection strategy that takes into account the user’s skill
level, proficiency, and timely spaced repetition needs
to be designed and integrated. Before each task is
generated, the module will read the relevant informa-
tion of each skill from the skill ontology for use by
the task selection algorithm. This is exactly why we
created the skill ontology in the semantic layer of the
tutoring system of the flow rig, as described in Sec-
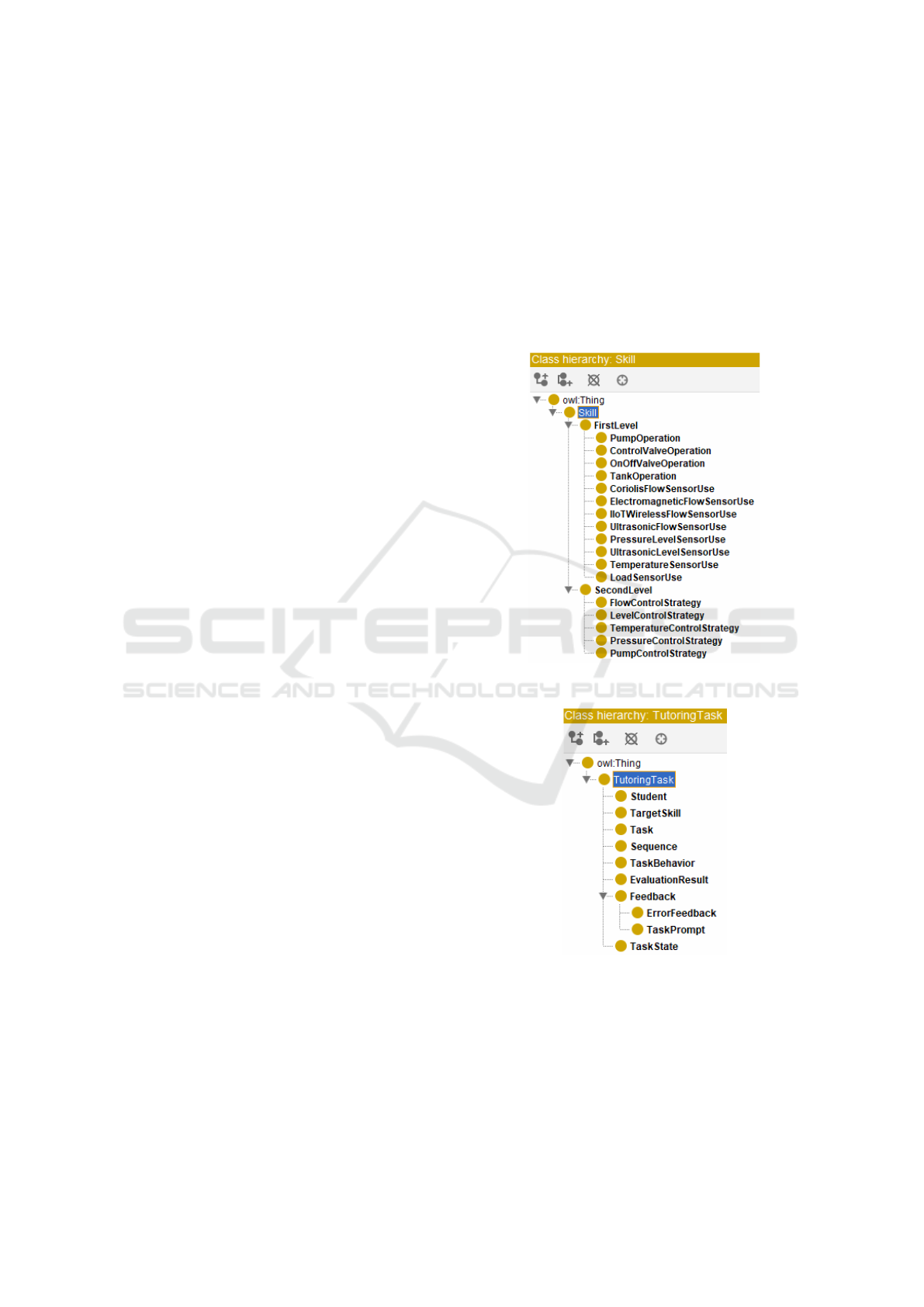
tion 4.2. A preliminary and simple skill ontology for
the flow rig training can be constructed as shown in
Figure 6. Each skill is endowed with proficiency and
learning intensity properties. During system initial-
ization, the proficiency and learning intensity infor-
mation of the skills from the user profile will populate
the skill ontology. In fact, in addition to the properties
directly related to task selection, there are some prop-
erties in the ontology that are defined due to the need
to build rule reasoning, which are flexibly added dur-
ing the rule design process. The new tasks are inferred
based on the designed ontology rules. The informa-
tion of the newly generated tasks will also be updated
in time to the tutoring task ontology. A preliminary
tutoring task ontology for the flow rig is presented in
Figure 7. All tutoring tasks for the flow rig are per-
formed in the same scene.
Figure 6: Skill ontology for flow rig training.
Figure 7: Tutoring task ontology.
Secondly, for the task real-time evaluation mod-
ule, its main goal is to segment the user’s interaction
with the immersive environment in real time, espe-
cially for continuous interactions, identify the user’s
misbehavior, and ultimately evaluate the proficiency
of the skill. For example, in a driving simulation, the
computer should segment the user’s driving behavior
A Framework for Intelligent Virtual Reality Tutoring System Using Semantic Web Technology
149

in real time into a sequence of discrete atomic behav-
iors or events (e.g. acceleration, shifting, etc.) based
on the time series of the user’s hardware input data
(e.g. the simulator’s pedal signals, steering wheel sig-
nals, etc.) and the driving simulation output data. For
the flow rig example above, the user’s interaction with
the flow rig virtual twin is inherently discrete, so it
does not need to be segmented. And since each user’s
behavior will be recorded in the behavior ontology,
the user’s behavior can be easily traced. Since the task
is also typically represented as a sequence of behav-
iors or events and is pre-stored in the semantic layer,
the reasoner can detect whether the user is misbehav-
ing based on predefined ontology rules. Detections
can be event-triggered or periodically triggered. Here,
based on the example of the control valve adjustment
behavior in the previous section, the following sim-
ple example is given to show how the semantic layer
implements the evaluation of user behavior, which is
implemented based on SWRL and SPARQL.
• order(adjustInstance, ?ord1)^
type(adjustInstance, ?t1)^
adjustedObject(adjustInstance, ?obj1)^
value(adjustInstance, ?val)^
TaskBehavior(?tb)^order(?tb, ?ord1)^
type(?tb, ?t1)^adjustedObject(?tb, ?obj1)^
value(?tb, ?val)->
isCorrect(adjustInstance, true)
• SELECT (COUNT(?x) AS ?c) WHERE
{adjustInstance isCorrect ?x}
The first one is the behavior evaluation rule based
on SWRL, which is triggered immediately after the
user performs the behavior. As shown in Figure 7, the
TaskBehavior class is defined in the tutoring task on-
tology, which is a subclass of the behavior class. Each
expected behavior in the task behavior sequence is an
instance of this class, and each behavior instance has
an order property value that represents the position of
the behavior instance in the behavior sequence. The
type property is used to indicate the type of the be-
havior. The isCorrect property indicates whether the
user is performing the correct behavior, which is not
asserted by default. The evaluation logic of this rule
is to compare the behavior performed by the user with
the expected behavior at the same position in the task
behavior sequence. If the two are completely consis-
tent, the reasoner asserts that the user’s current behav-
ior is correct.
The second one is the SPARQL query statement,
which is used to output the reasoning results of the
reasoner. It can also be implemented using Seman-
tic Query-Enhanced Web Rule Language (SQWRL)
(O’Connor and Das, 2009). The WHERE part de-
fines the pattern to be matched in the query, which
is based on the RDF triple structure. The wildcard ?x
dynamically binds the value obtained through pattern
matching. For brevity, the prefixes of the behavior in-
stance adjustInstance and property isCorrect, which
represent the namespace, are omitted here. The SE-
LECT part determines what data to output. Here, we
use the COUNT function to calculate the number of
?x that satisfies the pattern, and assign it to the wild-
card ?c for output. Since the isCorrect property of a
behavior instance is not asserted by default, when the
output value is 0, it indicates that the current behavior
is wrong; when the output value is 1, it indicates that
the behavior is correct. SPARQL queries can also be
used to implement prompts for task information.
To be sure, different developers define the rules
differently. The evaluation results will also popu-
late the tutoring task ontology for use by the user
feedback generation module. It should be noted that
tasks should be defined with consideration that there
may be more than one correct sequence of user be-
haviors, which can support students in exploratory
learning and thus promote their understanding and
mastery of skills (Aleven et al., 2009). Moreover,
in order to simplify the task authoring process, it is
promising to arrange the task behavior sequence by
directly letting tutors to demonstrate in the virtual en-
vironment, called authoring-by-doing (Richard et al.,
2021a). Based on the user’s performance, this mod-
ule will ultimately evaluate the user’s proficiency in
the currently trained skill and update it with the skill
learning intensity to the skill ontology. Once the tu-
toring concludes, all skill-related information will be
saved in the user’s profile for future reference.
Finally, the main goal of the user feedback gen-
eration module is to present the prompts of task in-
formation and the real-time evaluation results of the
evaluation module to the user. The presentation can
be visual or audio output. During the first training of
the task, the system should show the user the recom-
mended and detailed task solution, and provide the
most detailed error feedback in real time, including
the wrong behavior and the corrective solution. In or-
der to promote students’ mastery of skills, the sys-
tem should adaptively increase the difficulty of the
task with the improvement of users’ skill proficiency,
which can be achieved by reducing the level of de-
tail of prompts and feedback. To achieve this, a va-
riety of feedback forms with different levels of detail
can be pre-designed, and difficulty levels defined for
them. When a new task is generated, its difficulty
level is set, which will be recorded in the tutoring
task ontology. Based on the difficulty property value
of the task and real-time evaluation results, the feed-
back generation module generates feedback content
with the corresponding level of detail with the help of
CSEDU 2024 - 16th International Conference on Computer Supported Education
150

the reasoner, which will also be populated in the tutor-
ing task ontology for visual or audio output module to
read. There should also be the possibility for users to
manage their training themselves, including task se-
lection and difficulty settings.
5 CONCLUSION AND FUTURE
WORK
This paper proposed a framework of Semantic Web-
Enabled Intelligent VR Tutoring System, and ex-
pounded the implementation methods of the three
core modules of the framework in combination with
the flow rig use case. With regard to the development
of an immersive VR learning environment, the prob-
lems and expected solutions in implementing the vir-
tual twin for training were discussed, and it was em-
phasized that automating the virtualization process is
helpful to accelerate the development of training ap-
plications in the field of mechanical engineering.
An intelligent VR tutoring system based on this
framework can quickly deploy personalized training
content according to the user’s context and provide
real-time evaluation and feedback on user behavior,
which will help improve the effectiveness of VR train-
ing. The application of the ontology-driven method-
ology for updating training content is expected to
lower the cost of setting up virtual environments for
all training scenarios, which will be evaluated experi-
mentally in the future. Indeed, the proposed frame-
work can be extended to the development of skills
training applications in other fields beyond engineer-
ing education, such as driving, construction, emer-
gency scenarios, and more.
In the future work, the details of functional imple-
mentation of each module in the framework will be
studied, such as the design method of each domain
ontology in the semantic layer, the method of gen-
erating task behavior sequence through authoring-by-
doing (Richard et al., 2021a), the task selection al-
gorithm based on user context, and the adaptive user
feedback, etc. The proposed framework and method-
ology will be utilized for the flow rig immersive train-
ing application, along with more complex use cases.
Finally, in-depth user tests will be conducted to fully
evaluate our research results.
ACKNOWLEDGEMENTS
This work is funded by the China Scholarship Coun-
cil (CSC) under grant No. 202206890036, and the
Ministry of Science, Research and Arts of the Federal
State of Baden-Württemberg, Germany under Ko-
labBW project within the InnovationCampus Future
Mobility (ICM).
REFERENCES
Aleven, V., Mclaren, B. M., Sewall, J., and Koedinger, K. R.
(2009). A new paradigm for intelligent tutoring sys-
tems: Example-tracing tutors. International Journal
of Artificial Intelligence in Education, 19(2):105–154.
Benferdia, Y., Ahmad, M. N., Mustafa, M., and Ali, M.
A. M. (2021). The role of ontologies through the life-
cycle of virtual reality based training (VRT) develop-
ment process: A review study. International Jour-
nal of Advanced Computer Science and Applications,
12(9).
Bhagat, K. K., Liou, W.-K., and Chang, C.-Y. (2016). A
cost-effective interactive 3D virtual reality system ap-
plied to military live firing training. Virtual Reality,
20:127–140.
Chang, M., D’Aniello, G., Gaeta, M., Orciuoli, F., Samp-
son, D., and Simonelli, C. (2020). Building ontology-
driven tutoring models for intelligent tutoring systems
using data mining. IEEE Access, 8:48151–48162.
Dale, E. (1969). Audiovisual Methods in Teaching. Dryden
Press, New York, 3
nd
edition.
Elenius, D., Denker, G., and Kim, M. (2016). Seman-
tically enhanced virtual learning environments using
sunflower. In Proc. MTSR, pages 81–93. Springer,
Cham.
Filho, F. T., Aguiar, Y. P. C., and Vieira, M. F. Q.
(2015). Ontology based modelling of operator train-
ing simulator scenarios from human error reports. In
Proc. SIMULTECH, pages 261–270, Setúbal, Portu-
gal. SciTePress.
Filho, F. T. and Vieira, M. F. Q. (2014). An ontology-driven
framework to support scenario representation in a 3D
operator training simulator. In Proc. SIMULTECH,
pages 298–303, Setúbal, Portugal. SciTePress.
Gorecky, D., Khamis, M., and Mura, K. (2017). Introduc-
tion and establishment of virtual training in the factory
of the future. International Journal of Computer Inte-
grated Manufacturing, 30(1):182–190.
Gorecky, D., Loskyll, M., and Stahl, C. (2014). Semantic
digital factory–using engineering knowledge to create
ontologies for virtual training. IFAC Proceedings Vol-
umes, 47(3):7825–7830.
Häfner, P. (2020). Categorisation of the benefits and lim-
itations of immersive technologies for education. In
Proc. MAS, pages 154–159, Rende, Italy. Cal-Tek.
Häfner, P. (2021). Holistic Approach for Authoring Immer-
sive and Smart Environments for the Integration in En-
gineering Education. PhD thesis, Karlsruhe Institute
of Technology, Germany.
Häfner, V. (2019). PolyVR - A Virtual Reality Authoring
Framework for Engineering Applications. PhD thesis,
Karlsruhe Institute of Technology, Germany.
A Framework for Intelligent Virtual Reality Tutoring System Using Semantic Web Technology
151

Havard, V., Jeanne, B., Savatier, X., and Baudry, D. (2017).
Inoovas-Industrial ontology for operation in virtual
and augmented scene: The architecture. In Proc.
CoDIT, pages 0300–0305, New York. IEEE.
Herbert, B., Ens, B., Weerasinghe, A., Billinghurst, M., and
Wigley, G. (2018). Design considerations for combin-
ing augmented reality with intelligent tutors. Comput-
ers & Graphics, 77:166–182.
Horrocks, I., Patel-Schneider, P. F., Boley, H., Tabet, S.,
Grosof, B., and Dean, M. (2004). SWRL: A seman-
tic web rule language combining OWL and RuleML.
https://www.w3.org/submissions/SWRL/. Accessed:
2023-09-01.
Häfner, P., Häfner, V., Wicaksono, H., and Ovtcharova, J.
(2013). Semi-automated ontology population from
building construction drawings. In Proc. KEOD,
pages 379–386, Setúbal, Portugal. SciTePress.
Häfner, V. (2017). Modelling smart virtual en-
vironments. In 4. Fachkonferenz zu VR/AR-
Technologien in Anwendung und Forschung an der
Professur Werkzeugmaschinen und Umformtechnik,
pages 151–162, Chemnitz, Deutschland. Technische
Universität Chemnitz. https://var2.org/downloads/
Tagungsband-VAR2-2017_digital.pdf.
Häfner, V., Benedix, A.-C., and Häfner, P. (2020). Au-
tomatisierung des virtualisierungsprozesses im anla-
genbau. Zeitschrift für wirtschaftlichen Fabrikbetrieb,
115(3):148–152.
Jacinto, A. S. and Oliveira, J. M. P. (2008). An
ontology-based architecture for intelligent tutoring
systems. Interdisciplinary Studies in Computer Sci-
ence, 19(1):25–35.
Laine, J., Lindqvist, T., Korhonen, T., and Hakkarainen, K.
(2022). Systematic review of intelligent tutoring sys-
tems for hard skills training in virtual reality environ-
ments. International Journal of Technology in Educa-
tion and Science, 6(2):178–203.
Michels, F. L. and Häfner, V. (2022). Automating virtu-
alization of machinery for enabling efficient virtual
engineering methods. Frontiers in Virtual Reality,
3:1034431.
Muñoz Merino, P. J. and Kloos, C. D. (2008). An archi-
tecture for combining semantic web techniques with
intelligent tutoring systems. In Proc. ITS, pages 540–
550. Springer, Berlin, Heidelberg.
Musen, M. A. (2015). The protégé project: A look back and
a look forward. AI Matters, 1(4):4–12.
OASIS Standard (2015). MQTT Version 3.1.1. https://docs.
oasis-open.org/mqtt/mqtt/v3.1.1/mqtt-v3.1.1.html.
Accessed: 2023-07-03.
O’Connor, M. and Das, A. (2009). SQWRL: a query lan-
guage for OWL. In Proc. OWLED, page 208–215,
Aachen, Germany. CEUR-WS.org.
Pan, J. Z. (2009). Resource Description Framework, pages
71–90. Springer, Berlin, Heidelberg.
Richard, K., Havard, V., and Baudry, D. (2021a).
Authoring-by-doing: An event-based interaction
module for virtual reality scenario authoring frame-
work. In Proc. AVR, pages 519–527, Cham. Springer.
Richard, K., Havard, V., His, J., and Baudry, D. (2021b).
INTERVALES: INTERactive Virtual and Augmented
framework for industriaL Environment and Scenarios.
Advanced Engineering Informatics, 50:101425.
Ruthenbeck, G. S. and Reynolds, K. J. (2015). Virtual real-
ity for medical training: the state-of-the-art. Journal
of Simulation, 9(1):16–26.
Schiavi, B., Havard, V., Beddiar, K., and Baudry, D. (2021).
Semi-automatic generation of virtual reality procedu-
ral scenarios for operation in construction based on
4D building information models. In Proc. CONVR,
pages 104–111, Middlesbrough, UK. Teesside Uni-
versity Press.
U.S. National Academy of Engineering (2017).
NAE grand challenges for engineering.
http://www.engineeringchallenges.org/File.aspx?
id=11574&v=34765dff. Accessed: 2023-09-14.
Vaughan, N., Dubey, V. N., Wainwright, T. W., and Middle-
ton, R. G. (2016). A review of virtual reality based
training simulators for orthopaedic surgery. Medical
engineering & physics, 38(2):59–71.
Vesin, B., Ivanovi
´
c, M., Klašnja-Mili
´
cevi
´
c, A., and Budi-
mac, Z. (2012). Protus 2.0: Ontology-based seman-
tic recommendation in programming tutoring system.
Expert Systems with Applications, 39(15):12229–
12246.
Walczak, K., Floty
´
nski, J., Strugała, D., Strykowski, S.,
Soboci
´
nski, P., Gał ˛azkiewicz, A., Górski, F., Bu
´
n, P.,
Zawadzki, P., Wielgus, M., and Wojciechowski, R.
(2020). Semantic modeling of virtual reality training
scenarios. In Proc. EuroVR, pages 128–148. Springer,
Cham.
Wen, Y., Zhu, X., and Zhang, L. (2022). CQACD: A
concept question-answering system for intelligent tu-
toring using a domain ontology with rich semantics.
IEEE Access, 10:67247–67261.
Wicaksono, H., Dobreva, P., Häfner, P., and Rogalski, S.
(2013). Ontology development towards expressive
and reasoning-enabled building information model for
an intelligent energy management system. In Proc.
KEOD, pages 38–47, Setúbal, Portugal. SciTePress.
World Wide Web Consortium (2013). SPARQL 1.1 Query
Language. https://www.w3.org/TR/sparql11-query/.
Accessed: 2023-08-25.
Zahabi, M. and Abdul Razak, A. M. (2020). Adaptive vir-
tual reality-based training: a systematic literature re-
view and framework. Virtual Reality, 24:725–752.
CSEDU 2024 - 16th International Conference on Computer Supported Education
152
