
Prototyping Educational and Scientific Devices with a Custom Python
Library for Lego Robot Inventor 5in1 Mindstorms Kit: A Leap Motion
Integration Case Study
Jakub Malinowski
1
, Piotr Artiemjew
2 a
and Wojciech Cybowski
1
1
Scientific Circle of Robotics, Univeristy of Warmia and Mazury in Olsztyn, Poland
2
University of Warmia and Mazury in Olsztyn, Poland
Keywords:
Educational Technology, Prototyping Tools, Python Programming, Lego Mindstorms, Leap Motion
Controller, Interactive Learning Environments.
Abstract:
This paper introduces a custom Python library specifically developed to enable the rapid prototyping of de-
vices for educational and scientific purposes using the Lego Mindstorms Robot Inventor set. The integration
of Leap Motion as a case study exemplifies the library’s extensive capabilities in facilitating intuitive and inter-
active control mechanisms for mobile robots. Through the Leap Motion controller, this research explores the
innovative application of real-time hand gesture recognition, allowing users to command the robot with natural
gestures for movement, direction, and speed adjustments. The decision to use Leap Motion as a case study
serves to highlight the library’s adaptability and effectiveness in processing and interpreting gesture data,
thereby offering a glimpse into the broader potential of the library for various applications. This approach
demonstrates how educators and researchers can utilize the library to create engaging learning experiences
and conduct exploratory projects in robotics and beyond. By detailing the process of integrating Leap Motion
with the Robot Inventor set through our Python library, the paper underscores the potential of such tools in en-
hancing interactive learning environments and advancing the field of educational technology. The open-source
nature of the library, coupled with its modular design, ensures that it can be easily extended and adapted to fit
a wide range of educational and scientific prototyping needs. This paper thus presents a valuable resource for
those looking to explore the frontiers of interactive technology in education and research.
1 INTRODUCTION
The use of prototyping in education and research is
a very valuable practice. In general, it provides an
opportunity to teach in an interesting way, by observ-
ing the effects in the real world. And to create low-
cost initial versions of devices to verify research hy-
potheses. The current work is located in the area of
application of prototyping in learning to develop AI
techniques and creating hybrid IoT and robotic sys-
tems for research scenarios. In our laboratory (UWM,
2024), we have many years of experience in the use
of hardware in teaching intelligent robotics and ar-
tificial intelligence. Among others, we specialise in
the development of gesture control systems, having
experience in controlling Roomba, Nao, Spot, lego
robots - see for example the work (
˙
Zmudzi
´
nski et al.,
2016). We develop systems to train robotics and AI
a
https://orcid.org/0000-0001-5508-9856
algorithms using augmented reality markers - see for
example (Szpakowska et al., 2023). We generally de-
velop technology for algorithm learning and research.
In this paper, we focus on connecting the Robot
Inventor kit with the Leap Motion controller. We use
a Python library we developed in our robotics lab (Cy-
bowski, 2023) to help the robot work with a dedicated
Leap Motion control software suite. This work not
only highlights how gesture control can be applied in
robotics but also shows our lab’s dedication to push-
ing forward the development of educational and sci-
entific devices with easy-to-use and accessible tech-
nology
The next sections of this paper have the follow-
ing content. In sections 1.1 and 1.2 we have a dis-
cussion of the potential applications of our system in
education and research. In section 2, we discuss the
individual components of the project, the implemen-
tation part and demonstration of the project. Finally,
we summarise the work and discuss future works.
542
Malinowski, J., Artiemjew, P. and Cybowski, W.
Prototyping Educational and Scientific Devices with a Custom Python Library for Lego Robot Inventor 5in1 Mindstorms Kit: A Leap Motion Integration Case Study.
DOI: 10.5220/0012712600003693
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Computer Supported Education (CSEDU 2024) - Volume 1, pages 542-549
ISBN: 978-989-758-697-2; ISSN: 2184-5026
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

Figure 1: Graphical presentation of the system - use of Leap motion as a case study.
Let’s start by discussing the potential applications
of our lego mindstorms robot inventor 5in1 control
python library in educational contexts.
1.1 Educational Applications
Robotics Education. The developed Python library
and Leap Motion integration offer significant ad-
vantages in robotics education. By providing stu-
dents with a hands-on experience in controlling a
robot through intuitive hand gestures, this technology
enhances the learning process (Anderson and Dill,
2000). It promotes a deeper understanding of robotics
concepts, and sensor integration. Students can exper-
iment with different gestures and observe their imme-
diate impact on robot behavior, cultivating a practical
understanding of robotics principles.
Engaging STEM Learning. The use of gesture-
based control makes learning about science, technol-
ogy, engineering, and mathematics (STEM) more en-
gaging and interactive. It attracts the interest of stu-
dents at various educational levels, from elementary
schools to universities. The tool can be integrated
into STEM curriculum modules, enabling educators
to teach abstract concepts in a real and exciting man-
ner (Folk, 1981).
Prototyping and Design Projects. Students can
use the Python library to design and build their
robotic prototypes, experimenting with different con-
trol strategies. This hands-on approach encourages
creativity and problem-solving skills (Resnick et al.,
2009). Additionally, it allows students to gain prac-
tical experience in the iterative design process, from
concept development to prototype testing and refine-
ment.
Interdisciplinary Learning. The flexibility of the
Python library and its compatibility with other de-
vices and sensors create opportunities for interdisci-
plinary learning. Students from diverse backgrounds,
including computer science, engineering, and design,
can collaborate on projects that incorporate both hard-
ware and software elements (Cagiltay et al., 2014).
This promotes a comprehensive understanding of
technology integration.
Accessible Learning. The open-source nature of
the library ensures accessibility, making it an inclu-
sive tool for diverse learners. It can be easily shared
among educational institutions, ensuring that students
from various backgrounds have equal opportunities
to explore robotics and human-computer interaction
(Miglino et al., 1999).
Research Collaboration. Educators and re-
searchers can collaborate on innovative teaching
methods and curricula development using this tech-
nology. By sharing experiences and best practices,
they can continually improve robotics education and
contribute to the growth of the field.
In summary, the developed Python library and
Leap Motion controller integration offer valuable re-
sources for enhancing robotics education. They pro-
vide a platform for engaging, interactive, and interdis-
ciplinary learning experiences, empowering students
to explore the exciting world of robotics while en-
couraging creativity, problem-solving skills, and col-
laboration. Moreover, the open-source nature of the
tool promotes accessibility and collaboration among
educators and researchers, further advancing the field
of robotics education.
Let’s move on to discuss an overview of the re-
search and teaching applications of our project re-
sults.
Prototyping Educational and Scientific Devices with a Custom Python Library for Lego Robot Inventor 5in1 Mindstorms Kit: A Leap
Motion Integration Case Study
543

1.2 Research Applications
Rapid Prototyping and Experimentation. The
Python library and Leap Motion controller integration
provide researchers with a resourceful platform for
rapid prototyping and experimentation in the field of
robotics and human-machine interaction. Researchers
can quickly develop and test novel control algorithms,
user interfaces, and interaction paradigms, reducing
development time and costs (Lawitzky et al., 2013).
Human-Robot Interaction Studies. The gesture-
based control system enables researchers to conduct
in-depth studies on human-robot interaction (HRI).
By using hand gestures to control robots, researchers
can investigate how users perceive and interact with
robotic systems. This technology can be applied in
various HRI contexts, such as healthcare, manufac-
turing, and service robotics (Neto et al., 2019).
Usability Testing. Researchers can use the tool to
conduct usability testing of robotic systems and inter-
faces. By analyzing user interactions and feedback,
they can fine-tune the design of robotic applications
to improve user experience and efficiency. This is par-
ticularly valuable in the development of robotic solu-
tions for specific industries and user groups (Chac
´
on
et al., 2021).
Sensor Integration and Data Collection. The
Python library’s compatibility with various sensors
and devices allows researchers to integrate additional
hardware components seamlessly. This flexibility en-
ables the collection of rich sensor data, facilitating
research in areas such as environmental monitoring,
object recognition, and spatial awareness (Zhang and
Doyle, 2023).
Collaborative Research. The open-source nature
of the library promotes collaboration among re-
searchers and institutions. Researchers can share their
code and experiences, promoting a community of
experts in robotics and human-machine interaction.
Collaborative efforts can lead to the development of
standardized interfaces and best practices in the field
(Matthews and Greenspan, 2020).
Cross-Disciplinary Research. The tool’s adapt-
ability extends its utility to cross-disciplinary research
projects. Researchers from diverse fields, including
robotics, computer science, psychology, and engi-
neering, can collaborate on projects that use gesture-
based control and robotics technology to address
complex research questions (Rex Hartson, 1998).
Validation and Benchmarking. Researchers can
use the library to validate and benchmark their control
algorithms and robotic systems. By comparing the
performance of their solutions with the gesture-based
control system, they can assess the effectiveness of
their approaches and contribute to the advancement
of the field (Araujo et al., 2023).
In conclusion, the Python library and Leap Mo-
tion controller integration offer researchers a pow-
erful tool for advancing their work in robotics and
human-machine interaction. Whether it’s for rapid
prototyping, in-depth HRI studies, usability testing,
or cross-disciplinary research, this technology pro-
vides a flexible and accessible platform. The open-
source nature of the tool encourages collaboration and
knowledge-sharing among researchers, driving inno-
vation in the field and contributing to the development
of robust and user-friendly robotic systems.
Now lets discuss in detail how we created our
smart gesture control system, which is a demonstra-
tion of the use of our library.
2 PROJECT COMPONENTS AND
IMPLEMENTATION
Lets start by discussing the hardware compotents used
in the work.
2.1 Description of the Leap Motion
Controller
Leap Motion is a motion sensing and hand tracking
technology designed to provide precise and intuitive
control of digital devices through natural hand and
finger movements (Ultraleap, 2023). It utilizes ad-
vanced cameras and infrared sensors to track hand and
finger movements with remarkable accuracy, offering
a wide field of view of approximately 135 degrees.
Operating at up to 150 frames per second, it captures
hand gestures and movements in real time, making it
compatible with both Windows and macOS operating
systems. Leap Motion is equipped with a software
development kit (SDK), enabling developers to inte-
grate hand tracking into various applications, includ-
ing virtual reality, augmented reality, and interactive
design. It finds applications in fields such as virtual
reality gaming, medical simulations, architectural de-
sign, and more, enhancing user interaction and im-
mersion in digital environments.
CSEDU 2024 - 16th International Conference on Computer Supported Education
544

2.2 Description of Robot Inventor Kit
The LEGO Robot Inventor 5in1 Mindstorms kit is a
flexible and educational robotics set that allows users
to build and program five different robots (LEGO
Group, 2023). It offers a wide range of components,
including motors, sensors, and a programmable hub,
enabling users to create robots capable of various
tasks. With the help of the intuitive LEGO Mind-
storms software, users can code their robots to per-
form actions, follow commands, and even respond to
sensors. This kit is designed to teach programming,
engineering, and problem-solving skills in a fun and
hands-on way, making it suitable for both beginners
and more experienced robotics enthusiasts.
2.3 Competitive Solutions
There are many robotics platforms that can provide
an excellent environment to practice artificial intelli-
gence and robotics algorithms. Among these we have,
for example, the Aduino and the Raspberry Pi. The
advantage of Lego robots over other solutions is that
they have a closed, safe design, are very fault-tolerant
and have good quality sensors and servomotors in re-
lation to their price. In addition, by controlling Lego
robots in a semi autonomous way, serious robotics al-
gorithms can be tested at university level. For these
two reasons alone, we ourselves use these robots in
the process of educating students and decided to use
one of them in our work.
Next, let’s demonstrate how to use our library to
control robots with lego 5in1 robot inventor kits and
gesture recognition system.
2.4 Robot Control Using the Python
Library le mind controller
The library, named le mind controller and avail-
able at the following address as open source soft-
ware: github.com/wcyb/le mind controller, enables
communication and control of the hub, a key com-
ponent of the Lego Mindstorms set numbered 51515.
In addition, it should also work with the hub from the
Lego Spike Prime set numbered 45678, due to the fact
that the hubs in the two sets differ only in external ap-
pearance, but tests have not been conducted on the
hub from the 45678 set. Connection to the hub can
be made via a USB cable as well as via Bluetooth.
The type of connection does not affect the operation
and use of the library. The library is divided into four
modules:
1. Helpers.py - contains helper functions, respon-
sible for listing the serial ports available on
the system and for establishing a connection
through the selected port. The open source py-
Serial library, available at the following address:
github.com/pyserial/pyserial, is responsible for
the technical, operating system-dependent aspects
of handling serial ports.
2. MindComm.py - is responsible for formatting and
sending control commands to the hub. It also re-
ceives responses and data sent by the hub, and
then directs them to a parsing function in another
module. When sending commands, it is important
to remember that each must contain an individual
identifier. It is randomly generated, has a length of
four characters and consists of uppercase and low-
ercase letters, numbers and ”- ” characters. When
the hub executes a command, it sends back a mes-
sage with the same identifier as the command sent.
This makes it easy to control the status of com-
mand execution.
3. MindData.py - processes the data received from
the hub, as well as contains the definition of con-
stant values used by the modules connected to the
hub and the hub itself, such as the color seen by
the sensor or the type of module connected. The
functions contained in this module allow to eas-
ily obtain the information of interest from the hub
itself as well as the modules connected to it.
4. SerComm.py - it is used to handle events related
to the connection with the hub. Here one can find,
among others, functions called in case of connec-
tion loss or receiving a new line of data from the
hub.
2.5 Gesture Recognition Based on Leap
Motion
The code snippet in Figure 2 is an implementation for
handling data from the Leap Motion device in Python.
In brief, this code analyzes data related to hand and
wrist movements provided by the device and identi-
fies certain gestures based on that data.
The rotation angles (roll) and directions (yaw,
pitch) are transformed from radians to degrees. Then,
the code checks the type of hand (left or right) and
performs different conditional checks based on the
range of the hand’s rotation angle.
The main gestures identified by the code include
wrist movements, hand tilt angles, and the detection
of a fist by analyzing the finger angle. The results are
then sent to the console and logged to a file named
”log.txt” in the form of gesture labels and angle val-
ues.
Prototyping Educational and Scientific Devices with a Custom Python Library for Lego Robot Inventor 5in1 Mindstorms Kit: A Leap
Motion Integration Case Study
545
rolldeg = normal.roll * Leap.RAD_TO_DEG
arm = hand.arm
content1 = ""
content2 = ""
if handtype == "Right hand":
if -125 <= rolldeg <= -45:
content = "gestp:2"
armdeg = arm.direction * Leap.RAD_TO_DEG
handdir = direction.yaw * Leap.RAD_TO_DEG
- armdeg[0],→
if -15 < handdir < 15:
content1 = "gest:3"
content2 = handdir
#gest left, driving left
elif handdir < -15:
content1 = "gest:4"
content2 = handdir
#gest right, driving right
elif handdir > 15:
content1 = "gest:5"
content2 = handdir
elif -45 <= rolldeg <= 45:
armdeg = arm.direction * Leap.RAD_TO_DEG
handdeg = direction.pitch *
Leap.RAD_TO_DEG - armdeg[1],→
content = "gestp:1"
finger = hand.fingers[2]
bone = finger.bone(3)
punch = - bone.direction[1] *
Leap.RAD_TO_DEG - direction.pitch *
Leap.RAD_TO_DEG
,→
,→
if 5 < handdeg < 35:
content1 = "gest:6"
content2 = handdeg
#gest down, driving backward
elif handdeg < 5:
content1 = "gest:7"
content2 = handdeg
#gest up, driving forward
elif handdeg > 35:
content1 = "gest:8"
content2 = handdeg
#reset or exit gest
if punch < -40:
content1 = "gest:0"
content2 = punch
else:
print "gest not found"
content = False
if content:
print content, "\n", content1, "\n",
"degvalue:", content2,→
with open("log.txt", "a") as file:
file.write(content + "\n")
% \end{lstlisting}
Figure 2: Gesture recognition based on data from leap mo-
tion.
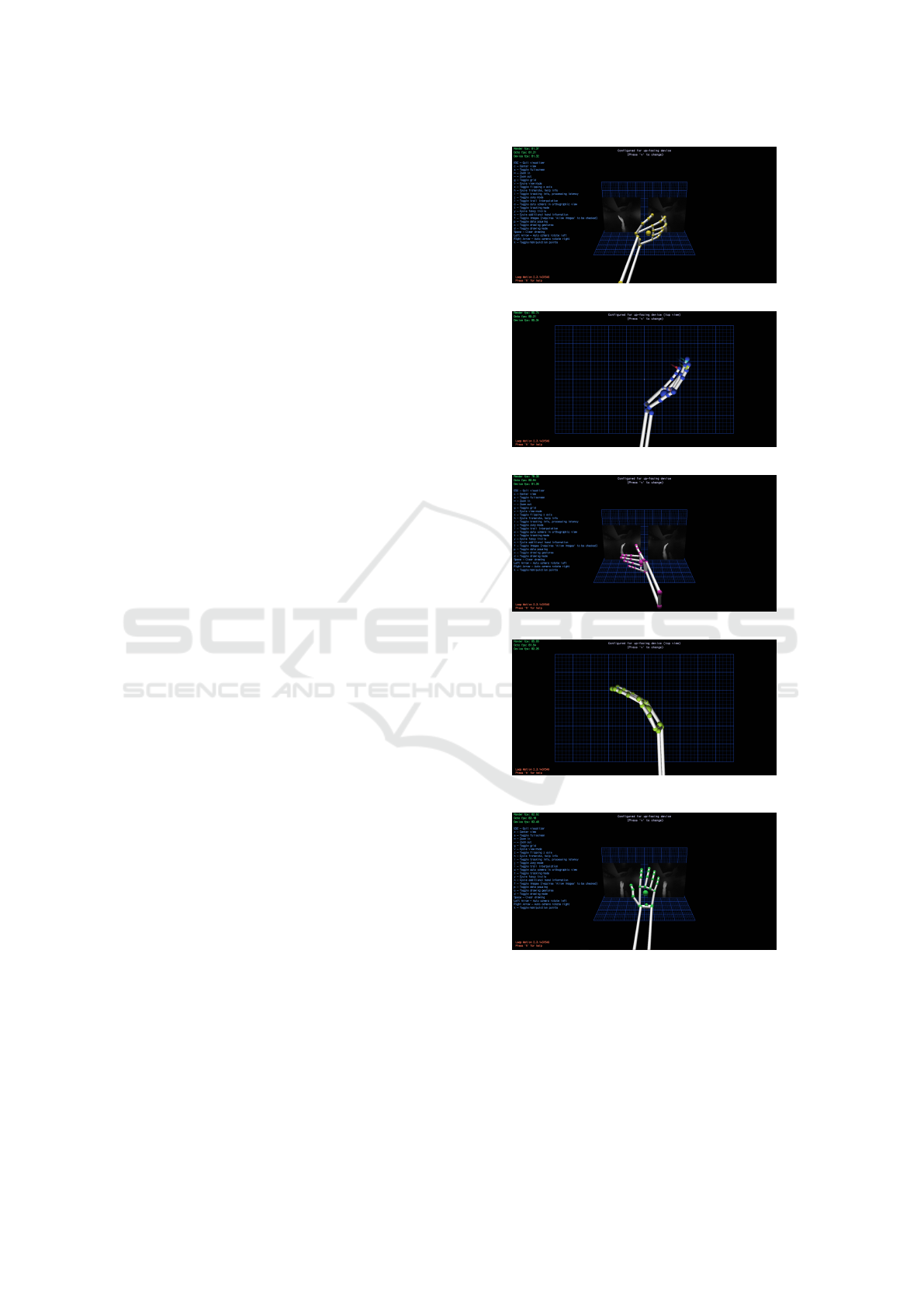
The gestures used in the work can be seen in Figs.
3 through 10.
Figure 3: Gest right, driving right.
Figure 4: Gest right, driving right.
Figure 5: Gest left, driving left.
Figure 6: Gest left, driving left.
Figure 7: Gest up, driving forward.
2.6 Controlling the Robot with Gestures
The provided code snippet is responsible for receiving
data from a process, analyzing the received messages
regarding types of gestures or angle values, and taking
appropriate actions based on the received commands.
This code is dedicated to interacting with a device,
CSEDU 2024 - 16th International Conference on Computer Supported Education
546

Figure 8: Gest up, driving forward.
Figure 9: Gest down, driving backward.
Figure 10: Gest down, driving backward.
likely related to movement or steering a vehicle.
In the code, each received line is processed to ex-
tract gesture type or angle value. Depending on the
identified gesture, corresponding actions are taken,
such as controlling motors to move in different direc-
tions.
The code involves checking and comparing the
received commands, performing specific actions for
each command, and controlling motors accordingly.
The overall functionality is geared towards the con-
trol and movement of a device based on gestures and
angles received from an external source.
2.7 Demonstration and Codes
For the project, we used a robot control library devel-
oped in our scientific team (Cybowski, 2023), based
on the intelligent lego cube from the Robot Inven-
tor kit (LEGO Group, 2023). And we used the SDK
of the LeapMotion hand tracking device (Ultraleap,
2023). A demonstration of how to use the system is
available at the youtube link (Malinowski and Artiem-
jew, 2023). Screen shots of the gestures used can be
seen in figures from 3 to 10. The codes applied to the
controls in Figures 2, 11 and 12. An example robot
process = subprocess.Popen(
[python2_path, "./Development/Sample.py"],
stdin=subprocess.PIPE,
stdout=subprocess.PIPE,
stderr=subprocess.PIPE,
universal_newlines=True)
[...]
for line in process.stdout:
if line != "\n":
# Divide the line by gesture type or
angle value,→
line_gest = line.split(":", 1)
if line_gest[0] == "gest":
command = line_gest[1]
if command:
print("Command:", command, end="")
# Check the order received and take
appropriate action,→
# gest up, driving forward
if command == '8 \n':
#Taking action on change of command
if last_command and last_command != '8
\n':,→
print('up')
mc.cmd_stop_program_execution()
mc.cmd_motor_turn_on(HubPortName.A,
-50),→
mc.cmd_motor_turn_on(HubPortName.E,
50),→
status = True
# gest down, driving backward
elif command == '7 \n':
if last_command and last_command != '7
\n':,→
print('down')
mc.cmd_stop_program_execution()
mc.cmd_motor_turn_on(HubPortName.A,
50),→
mc.cmd_motor_turn_on(HubPortName.E,
-50),→
status = True
# gest left, driving left
elif command == '4 \n':
if last_command and last_command != '4
\n':,→
print('left')
mc.cmd_stop_program_execution()
mc.cmd_motor_turn_on(HubPortName.A,
50),→
mc.cmd_motor_turn_on(HubPortName.E,
50),→
status = True
Figure 11: Robot control using leap motion data - code
snipet part1.
from the Robot Inventor kit in fig. 13.
2.8 Possibilities for Other Experiments
To expand the awareness of how our system can be
used we will have a discussion in this section about
Prototyping Educational and Scientific Devices with a Custom Python Library for Lego Robot Inventor 5in1 Mindstorms Kit: A Leap
Motion Integration Case Study
547

# gest right, driving right
elif command == '5 \n':
if last_command and last_command != '5
\n':,→
print('right')
mc.cmd_stop_program_execution()
mc.cmd_motor_turn_on(HubPortName.A,
-50),→
mc.cmd_motor_turn_on(HubPortName.E,
-50),→
status = True
else:
if status:
# Stopping the execution of a
command,→
mc.cmd_stop_program_execution()
status = False
last_command = command
if line_gest[0] == "degvalue":
value = line_gest[1]
if value:
print("value:", value)
# Additional safety shutdown
if not q.empty():
item = q.get()
process.communicate("\n")
sys.exit()
% \end{lstlisting}
Figure 12: Robot control using leap motion data - code
snipet part2.
Figure 13: The robot used in the experimental part - based
on Smart Element Hub cube with LED screen of the Robot
Inventor kit.
possible experimental extensions that we use in prac-
tice with other libraries. First and foremost, in the
lego set under consideration we have the ability to
control servo motors, determine direction of move-
ment, track coloured objects and measure distance to
obstacles. Which, in a student learning environment,
provides a simple way to test localization filters us-
ing distance in map fields and distinguishable colour
shades on the floor. Another area of application is the
implementation and testing of PID controllers for the
precise movement of robots on a map between pre-
defined path co-ordinates, and thus also the testing
of path planning algorithms such as D* Lite. Us-
ing motor speed control and information about the
robot’s position relative to the target direction be-
tween points. In addition, it is possible to test the
algorithms with limited knowledge of the surround-
ings, e.g. by tracking obstacles encountered and map-
ping the terrain. In fact, it is only in the field of au-
tonomous robots that it is possible to learn and practi-
cally test dozens of algorithms with this simple robot.
Not to mention the myriad applications creating hy-
brid control systems - where we have only shown one
of them in our publication.
3 CONCLUSION & FUTURE
WORKS
In this paper we presented our new python library
for controlling devices built from the lego robot 5in1
mindstorms kit. That is, a toolkit for testing robotics
and AI algorithms in constructed within the capabil-
ities of this technology. We reviewed possible appli-
cations of the library in education and research. As
a case study, we made a presentation of the combina-
tion of a Leap Motion device for gesture control of an
example robot from the kit. As a demonstrator, we
created a fully functional gesture control system for a
selected robot. In this work, we offer a highly func-
tional tool for prototyping research scenarios related
to the application of robotics and AI techniques in the
IoT area. And we demonstrate an in-house tool for
learning to develop algorithms - with observation of
how they work in practice. In future work, we plan to
demonstrate the possibility of using our library with
other controllers, e.g. the cyberith virtualiser and the
xtion-pro controller.
ACKNOWLEDGEMENTS
This work has been supported by the grant from Min-
istry of Science and Higher Education of the Republic
of Poland under the project number 23.610.007-110
CSEDU 2024 - 16th International Conference on Computer Supported Education
548

REFERENCES
Anderson, C. A. and Dill, K. E. (2000). Video games and
aggressive thoughts, feelings, and behavior in the lab-
oratory and in life. Journal of Personality and Social
Psychology, 78(4):772–790.
Araujo, H., Mousavi, M. R., and Varshosaz, M. (2023).
Testing, validation, and verification of robotic and au-
tonomous systems: A systematic review. ACM Trans.
Softw. Eng. Methodol., 32(2).
Cagiltay, K., Kara, N., and Cigdem, C. (2014). Smart Toy
Based Learning, pages 703–711.
Chac
´
on, A., Ponsa, P., and Angulo, C. (2021). Usability
study through a human-robot collaborative workspace
experience. Designs, 5(2).
Cybowski, W. (2023). Library for smart element hub cube
lego robot inventor kit. https://github.com/wcyb/le m
ind controller.
Folk, M. (1981). Review of ”mindstorms: Children, com-
puters, and powerful ideas by seymour papert”, ba-
sic books: New york, 1980. SIGCUE Outlook,
15(1):23–24.
Lawitzky, M., Hern
´
andez, J. R. M., and Hirche, S. (2013).
Rapid Prototyping of Planning, Learning and Control
in Physical Human-Robot Interaction, pages 73–88.
Springer International Publishing, Heidelberg.
LEGO Group (2023). Robot inventor 5-in-1 mindstorms.
https://www.lego.com/. Accessed on November 14,
2023.
Malinowski, J. and Artiemjew, P. (2023). Demonstration of
a gesture control project using leap motion with the
lego robot inventor kit 5in1 mobile robot. https://ww
w.youtube.com/shorts/AjKu5T4IbkE. Accessed on
November 14, 2023.
Matthews, P. and Greenspan, S. (2020). Automation and
Collaborative Robotics: A Guide to the Future of
Work.
Miglino, O., Hautop, H., and Cardaci, M. (1999). Robotics
as an educational tool. Journal of Interactive Learning
Research, 10.
˙
Zmudzi
´
nski, L., Augustyniak, A., and Artiemjew, P. (2016).
Control of mindstorms nxt robot using xtion pro cam-
era skeletal tracking. Technical Sciences, 19(1):71–
81.
Neto, P., Sim
˜
ao, M., Mendes, N., et al. (2019). Gesture-
based human-robot interaction for human assistance
in manufacturing. International Journal of Advanced
Manufacturing Technology, 101:119–135.
Resnick, M., Maloney, J., Monroy-Hern
´
andez, A., Rusk,
N., Eastmond, E., Brennan, K., Millner, A., Rosen-
baum, E., Silver, J., Silverman, B., and Kafai, Y.
(2009). Scratch: Programming for all. Commun.
ACM, 52:60–67.
Rex Hartson, H. (1998). Human–computer interaction: In-
terdisciplinary roots and trends. Journal of Systems
and Software, 43(2):103–118.
Szpakowska, A., Artiemjew, P., and Cybowski, W. (2023).
Navigational strategies for mobile robots using rough
mereological potential fields and weighted distance
to goal. In Campagner, A., Urs Lenz, O., Xia, S.,
´
Sle¸zak, D., Wa¸s, J., and Yao, J., editors, Rough Sets,
volume 14481 of Lecture Notes in Computer Science.
Springer, Cham.
Ultraleap (2023). Leap motion. https://www.ultraleap.com/.
Accessed on November 14, 2023.
UWM (2024). Intelligent robotics laboratory. http://www.
uwm.edu.pl/nkr/. Accessed on March 22, 2023.
Zhang, Y. and Doyle, T. (2023). Integrating intention-based
systems in human-robot interaction: a scoping review
of sensors, algorithms, and trust. Frontiers in Robotics
and AI, 10:1233328.
Prototyping Educational and Scientific Devices with a Custom Python Library for Lego Robot Inventor 5in1 Mindstorms Kit: A Leap
Motion Integration Case Study
549
