
Knowledge-Based Approach to Generate Scenarios for Testing
Highly Automated On-Sight Train Operations
Lucas Greiner-Fuchs
1,2
and Martin Cichon
2
1
Institute of Vehicle Technology, Nuremberg Institute of Technology, Keßlerplatz 12, Nuremberg, Germany
2
Institute of Vehicle System Technology, Karlsruhe Institute of Technology, Rintheimer Querallee 2, Karlsruhe, Germany
Keywords: Scenario-Based Testing, Scenario Generation, Automatic Train Operation, Automated Driving System,
Operational Design Domain.
Abstract: Scenario-based test methods are cumulatively used for developing and testing highly automated railway
vehicles, similar to the automotive industry. However, due to significant differences between the two
technologies, existing approaches in the automotive sector cannot be directly applied to railways. Therefore,
it is necessary to develop revised and new processes and methods that are tailored to the rail sector.
The primary step in scenario-based testing is to set up appropriate test scenarios. A significant challenge faced
by the rail industry is the limited availability of measured data from actual railway operations. For this reason,
knowledge-based data sources need to be primarily used and considered in the scenario generation process.
This paper presents a basic approach to define sufficient quantity of test scenarios for highly automated
railway vehicles, using as an example a sensor-supported system for on-sight train operation. The approach
uses the system definition of the automated system as input, includes the operational design domain, and
considers railway-specific data through formalities and knowledge sources. Scenarios are then systematically
derived in three steps: description, combination, and derivation. In the end, a set of testable scenarios is
generated that can be used for virtual and real field testing of automated train operations.
1 INTRODUCTION
The rail system is a high priority in the current focus
of politics and society. The system offers low
greenhouse gas emissions and high energy efficiency
through the use of electromobility, as well as high
levels of traffic safety and capacity with low land
consumption for passenger and freight transport.
Despite the social and global advantages, the
proportion of rail passenger transport performance
has stagnated in recent years, and rail freight transport
has even decreased in Europe. This is primarily
caused by the low economic performance of the rail
system. However, Europe is expected to experience a
significant increase in the rail sector. To manage this
growth, rail transport must increasingly focus on
digitalisation and automation. (Zintel et al., 2023).
The development of highly automated driving
systems (HADS), has a high priority in current
research and industry. In addition to, for example
increasing driving comfort in the automotive sector
and compensating for the lack of personnel in the
railway sector, automation primarily improves the
capacity of transport systems with at least same levels
of safety and reliability. With the establishment of the
SAE J3016 standard (SAE International, 2021) of the
automotive industry in 2014 and the IEC 62290-1
standard (IEC, 2006) from 2006 as the Grade of
Automation (GoA) level in the railway industry, both
have created a detailed description and categorisation
of HADS in terms of their degree of automation.
In addition to the focused development of HADS,
extensive testing of these systems is necessary.
Alternative test approaches, such as scenario-based
testing, are increasingly coming into focus. For
automotive, extensive research projects have already
been launched, such as the Pegasus project family
(Pegasus, 2020; VVM, 2022). Despite early high
levels of automation, such as the first GoA4-System
on the Port Island line in Kobe, Japan in 1981 (Powell
et al., 2016), there are still few established research
approaches or test methods and strategies for
demonstrating the safe operation of Automatic Train
Operation (ATO) Systems, especially for not
restricted and intersection-free rail traffic. The
similarities between the definitions of automation
394
Greiner-Fuchs, L. and Cichon, M.
Knowledge-Based Approach to Generate Scenarios for Testing Highly Automated On-Sight Train Operations.
DOI: 10.5220/0012693500003702
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 10th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2024), pages 394-401
ISBN: 978-989-758-703-0; ISSN: 2184-495X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

levels suggest comparable testing approaches. Also,
the grade of complexity of ATO-Systems is
comparable to that of automated road transport. There
are parallels, particularly in the area of on-sight train
operation, where similar sensor systems are used. The
focus is on monitoring the environment and keeping
the track clear. Established approaches and tools of
the automotive industry can serve as inspiration, but
different Use Cases (UC) and system boundaries
require a review and revision as well as a derivation
of new methods for the test process. When it comes
to rail-bounded driving, it is important to consider
additional knowledge sources and processes due to
varying regulations, physical conditions, and UCs.
During test development, a strong focus is placed
on the definition of appropriate scenarios. In this
context, there are scenarios in rail traffic that are very
similar to those in road traffic, such as situations
involving signal detection, passing groups of people
(station entrance, city traffic) or simple speed
changes. However, typical road traffic manoeuvres
and situations such as overtaking, following or mixed
traffic (cars, cyclists, pedestrians, etc.) are only used
to a limited extent in the rail sector or are not possible
due to the system. In contrast, there is a greater focus
on data and radio transmission scenarios or on
monitoring the clearance gauge. Furthermore, the use
of a separate traffic network, interfaces to other traffic
participants (gated and ungated level crossings, entry
and exit of passengers at regularly scheduled stops)
as well as regulations in train operation (automatic
train control, block signalling, train radio) have to be
considered. Rail operations are limited due to the use
of rail-bound vehicles and long braking distances
caused by high masses and low coefficients of friction
in wheel-rail contact. Equipping test vehicles and
demonstrators and carrying out real field tests and
measurements involves greater effort and cost in the
rail sector. Rail vehicles can only be driven by trained
personnel, and the availability of vehicles and track
sections for system testing and data recording is also
a major challenge. This has an impact on the paucity
of real-world measurement data. Vehicle and
environmental data from real drives and situations are
a useful source for creating appropriate scenarios. In
the automotive industry there are many data sets
available, some of which are publicly accessible, due
to extensive endurance campaigns (Guo et al., 2018).
This input is not available in the rail industry, which
is why it is not possible to derive test scenarios
directly from measurement data.
Considering all the reasons mentioned above, this
paper shows the current state of research on a
methodological approach for the knowledge-based
generation of sufficient scenarios for testing ATO. The
focus here is on the aspect of perception in on-sight
train operation, in which the driver has full
responsibility for track monitoring in the non-
automated case. The objective of this paper is to
demonstrate a method comparable to the state of the art
in the automotive industry and to advance the
development and testing of HADS for rail vehicles. At
the beginning some basic information about scenario-
based testing are mentioned. Afterwards the generation
process for relevant railway scenarios is introduced.
2 SCENARIO-BASED TESTING
Due to reasons of economy, clarity, time efficiency,
and organization, conventional test approaches, such
as distance-based testing, are no longer practical.
Instead of executing millions of test kilometres in the
real world, potential eventualities in the application
field of the HADS are described as completely as
possible through different scenarios. These are tested
in a coordinated process first in a virtual environment
and additional partially in the field. (Schuldt, 2017).
The sections below provide basic information on the
term of a scenario and scenario generation methods.
2.1 Scenario Characterization
To gain a better understanding of a scenario, the terms
scene, scenery and situation are described. A scene is
a snapshot of the environment, including the scenery,
dynamic elements, actors, and watchers. The scenery
contains the stationary elements that make up the
fundamental environment of the scene. Finally, the
situation describes the functional information through
the scene, such as interactions and states of different
movable elements, as well as missions or tasks.
Starting with an initial scene, changes described by
the situation and ending with a final scene, a scenario
is a temporal development of scene elements.
Different scenes are combined by actions and events.
(Ulbrich et al., 2015).
The description of a scenario can be presented at
different levels of abstraction, depending on the
specific UC. In the Pegasus project, three scenario
levels were defined based on the work of (Bagschik
et al., 2017). The functional scenario provides the
most abstract description, where the situation is
specified in a semantic form. The logical scenario
then concretises the semantic variables using
parameter spaces. Finally, the concrete scenario is
formed as an instance of the logical scenario using a
variation of these parameters. All variables have
Knowledge-Based Approach to Generate Scenarios for Testing Highly Automated On-Sight Train Operations
395
detailed parameters, and the scenario is fully
described. (Bagschik et al., 2017; Pegasus, 2020).
2.2 Scenario Generation Methods
There are several cross-domain approaches to derive
scenarios. This paper focuses on methods of the
automotive sector because of its thematic proximity
to railways. The survey conducted by (Riedmaier et
al., 2020) provides a general overview of scenario
generation and presents various approaches to derive
scenarios. In particular, data-based and knowledge-
based approaches have proven to be effective for
scenario generation.
To create a set of scenarios from recorded field
data, a sufficient amount of real driving data must be
available. Recording this data requires extensive
endurance projects and data management. The use of
real driving data ensures that all derived scenarios are
realistic and applicable. However, it is important to
note that the scenario set only covers what the data set
includes, and critical situations may be missing.
In the knowledge-based approach, having a solid
foundation of knowledge data is essential. The
information collected from various sources must be
linked appropriately to generate scenarios. One
common method is the use of an ontology (Bagschik et
al., 2018). Other approaches include equivalent or
specially developed combination languages (Fremont
et al., 2018). At (Menzel et al., 2018), a detailed
example of the knowledge-based generation process is
mentioned based on (Bagschik et al., 2018). Semantic
scenarios are generated using an ontology, specified
with the 6-Layer Model presented in (Scholtes et al.,
2021) and then converted into concrete test scenarios
for use in OpenSCENARIO (ASAM e. V., 2024) by
parameterizing the semantic variables. To utilize the
distinct advantages of data-based and knowledge-
based scenario generation, (Hao et al., 2023) propose
an approach that combines both methods.
Based on current research and definitions, a
railway-specific approach for scenario-based testing
is introduced, taking into account the requirements of
the railway system and the challenges of data
generation. The following chapter presents the
developed method and its individual components.
3 GENERATION OF RELEVANT
RAILWAY SCENARIOS
ATO can be used for different fields of application. A
methodical approach for the development of a tool
chain for scenario-based testing of ATO-Systems was
presented at (Greiner-Fuchs et al., 2022). Based on
this, our paper outlines a method for generating
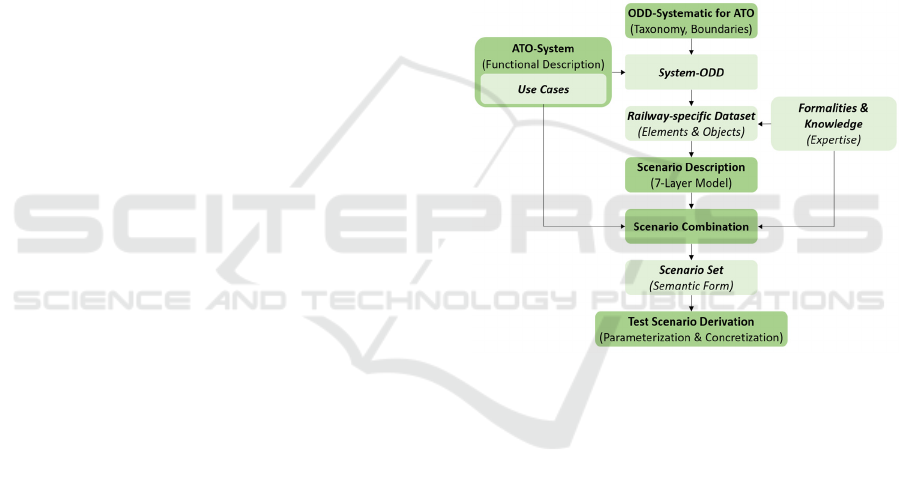
appropriate scenario sets. Figure 1 shows the
proceeding of the Scenario Generation. The following
subsections present the current state of our research
on the knowledge-based scenario generation process.
First, based on the ATO-System, the associated
Operational Design Domain (ODD) is discussed.
This is followed by the process of creating a
knowledge-based dataset of the necessary scenario
elements. The Scenario Description is then
introduced as the basis for Scenario Combination.
During this part, the combinatorics and actual
generation are discussed, from which the scenario set
is finally created. Lastly, the derivation of concrete
test scenarios is described.
Figure 1: Proceeding of knowledge-based Scenario
Generation for ATO-Systems.
The structure should ensure a high degree of
automation and be used for different kind of ATO-
Systems. The challenge is to fully integrate and consi-
der all necessary knowledge sources while ensuring
consistency throughout the scenario generation
process. In our research, the focus is on the evaluation
of automated on-sight train operation that work in
combination with sensor units. In main line operation,
the use of visual track monitoring is limited due to the
long braking distances. Nevertheless, there are still
situations that require sensor-based environment
detection in driverless operation. These include, for
example, shunting movements for train preparation,
monitoring train entry and exit at platforms, or critical
situations where safe operation cannot be guaranteed
by train control. In addition to main line operations,
other important applications include operating in
shunting yards, industrial and port facilities, and the
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
396
operation of trams or other slow-moving rail vehicles.
For the application testing of the method, we focus on
automated shunting operations (ASO).
3.1 Operational Design Domain
The first step of the generation process, located in the
upper part of Figure 1, is to define the boundaries and
scope of the HADS. For this purpose, an ODD of the
ATO-System is formulated. Within the ODD, the area
of application of the HADS is determined, thus
defining the conditions under which the system can
be used. For automotive applications in this purpose,
the PAS 1883 standard (British Standards Institution
(BSI), 2020) defines the fields of scenery,
environmental conditions and dynamic elements. The
standard provides a taxonomy as a basis for setting up
the System-ODD.
For the formulation of a railway-specific ODD-
Systematic the PAS 1883 standard is used as input
and system definitions from current research on ATO
applications are analysed. Initial approaches to the
definition of an ODD in rail transport can be found,
e.g., in (Tonk et al., 2021), where a proposal for the
definition of an ODD for securing remote driving
trains based on the PAS 1883 standard was
introduced. Another approach by (Meng et al., 2021)
presents an ODD for high-speed ATO-Systems in the
context of an analysis of derived scenarios.
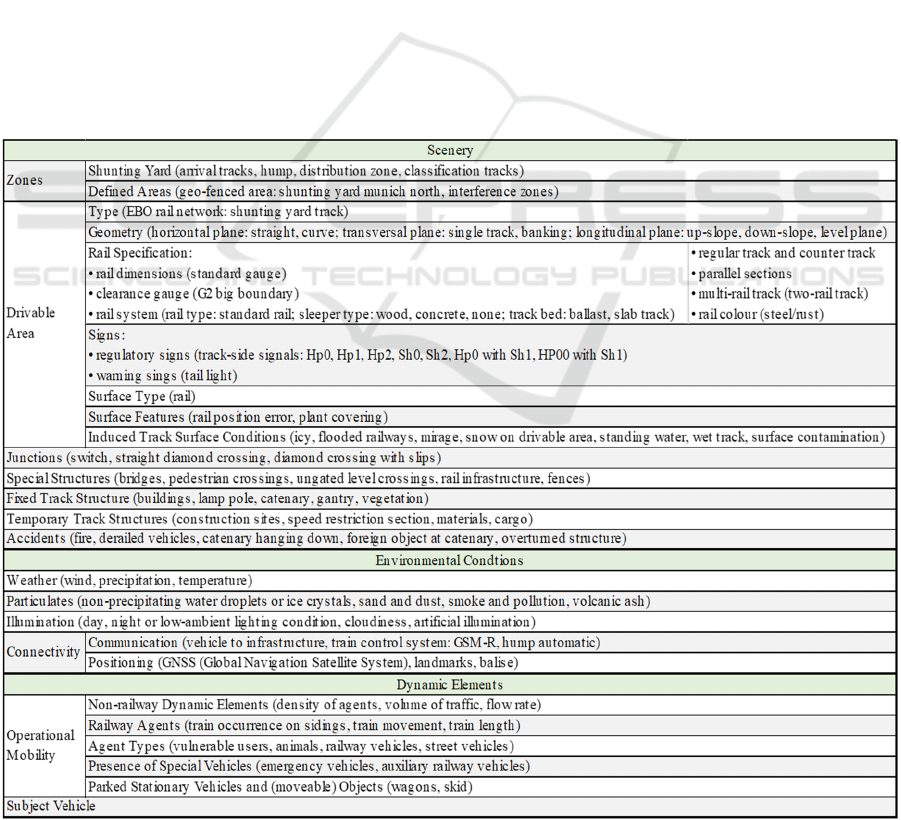
In the test development of the ASO-System, we
created a first draft of an ODD, which is shown in
Table 1. The ODD is based on the PAS 1883
standard, with specific adaptations and extensions for
the field of ASO. In relation to the functional
requirements of the system, implicitly the
specifications, as well as the operational area as
shunting yard in Germany, the individual aspects of
this ODD are determined. The three categories
scenery, environmental conditions and dynamic
elements are defined to the extent necessary to
represent the scope and operating conditions of the
ASO-System. Amongst the surroundings, conditions
and occurring elements under which the system is to
function
faultlessly, information is provided on data
Table 1: ODD for Automated Shunting Operations.
Knowledge-Based Approach to Generate Scenarios for Testing Highly Automated On-Sight Train Operations
397

communication, details on the missions and
movements of the ego-vehicle and other dynamic
elements. Besides the functional description of the
ASO-System, it is also useful to derive its specific
UC. These are complementary to the definition of the
System-ODD and also serve to derive the test
scenarios in an efficient manner. (Hofmeier et al.,
2022) describes how UCs for the example of ASO can
be derived.
Further research will define a railway-specific
ODD-Systematic with the assistance of the ODD for
ASO. This taxonomy must be able to map ODDs
from all areas of rail transport and represent the limits
and scope of a specific ATO-System.
3.2 Railway-Specific Dataset
The System-ODD in combination with railway-
specific knowledge sources are used to create a
dataset that forms the foundation for the Scenario
Description. The dataset must include all entities
required for testing in various scenarios. This
encompasses a comprehensive list of necessary static
and dynamic objects associated with the defined
ODD, as well as descriptions of the track topologies
to be considered. The dataset thus serves to specify
the aspects defined in the System-ODD and provides
the foundation for Scenario Generation. The structure
and process for filling the dataset can be used across
different ODDs, but a separate or customized dataset
must be created for each specific ODD.
To achieve comprehensive ODD-specific test
case coverage, it is essential to aim for a high degree
of completeness when setting up the dataset. This task
requires the use of multiple data sources to populate
the dataset. For our example of ASO at a German
shunting yard, this analysis will consider operational
and situational conditions through formalities and
guidelines such as the train service instruction (DB
Netz AG, 2021), signal regulation (DB Netz AG,
2020), and railway construction and operating
regulations (Eisenbahn Bau- und Betriebsordnung:
EBO, 1967), as well as existing operational datasets
and expert knowledge. Additionally, exceptional
cases and potential errors in regular operation will
also be taken into account. This will be achieved
through the use of statistics on accidents and
operational analyses. Examples of well-known
sources include the investigation reports of the
German Federal Bureau of Railway Accident
Investigation and its open dataset on hazardous
incidents in railway operations that have been finally
investigated (BEU, 2024). Own experiences from
system development and recorded data during our
research are also considered. Furthermore, small
existing public and self-collected measured datasets
are used as a supplement. However, the current
amount of data is insufficient for a complete
measurement-based derivation of scenarios.
Therefore, the data serves only as an additional source
of knowledge.
3.3 Scenario Description
To set up scenarios, a logical process is used based on
the collected objects in the dataset. Following the 6-
Layer Model (Scholtes et al., 2021), a railway-
specific Scenario Description was published by
(Greiner-Fuchs et al., 2023). In this description, a
model for rail transport is developed and extended
specifically for the example of ASO to the 7-Layer
Shunting Model. The model provides the
fundamental framework for an organized scenario
layout. The entities from the railway-specific dataset
are assigned to seven distinct layers. The sorting
process is performed simultaneously with the dataset
creation, resulting in a sorted database that can be
directly applied to the method.
Starting with Layer 1 “Railway system and
signals”, the scenario's scenery is first defined. Layer
2 “Stationary objects” defines all non-moving objects
that occur in the environment of the situation. Layer
3 “Temporary changes of Layers 1, 2 (& 4)” contains
temporary deviations from the previous layers, e.g.
due to a tree falling onto the track or also derailed
railway vehicles. Last mentioned are usually assigned
to Layer 4 “Dynamic objects”, which contains all
movable elements. Weather, light and soil conditions
can be found in Layer 5 “Environmental conditions”.
Layer 6 “Digital information” deals with digital data
such as localisation signals, digital maps or the status
of railway traffic lights. In addition, Layer 7
“Shunting order” has been added for the ASO-System
as a higher-level information and status layer. The
shunting order describe the work tasks and the
associated movement of the locomotive, including
data on the driving route, travel speed in various track
sections and track release notification. In addition,
indirectly safely occurring objects, such as wagons or
shunting staff, can be derived for scenario definition.
When using the method, it is possible to create a
wide variety of scenarios based on the sorted
database. Thereby, a scenario can always consist of a
defined number of objects per layer. The use of this
ordered approach is shown in the following Scenario
Combination.
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
398
3.4 Scenario Combination
The complete scenario set is created by following the
structuring and sorting of the scenario description
above. Starting from the lowest level of abstraction,
the scenarios are implemented in semantic form
according to (Bagschik et al., 2017). To achieve this,
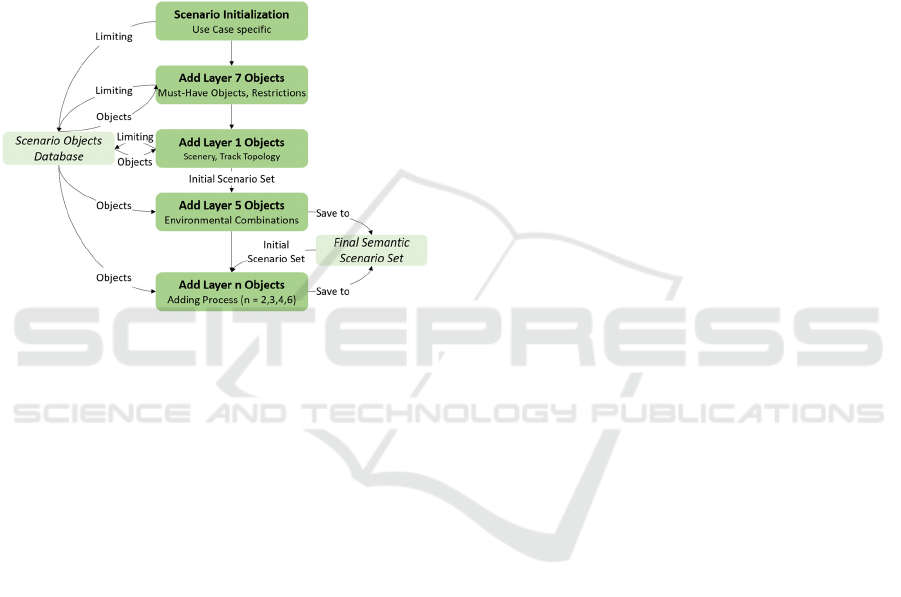
a program flow combinatorics is developed, which is
shown in Figure 2 as a simplified flowchart. In the
following, the individual steps of combinatorics are
listed and the chosen order of the object combination
is explained.
Figure 2: Flowchart - Combination Process.
The first step is the Scenario Initialization, where
basic information of the scenario is generated. The
objects in the database are also pre-filtered directly,
referenced to the specific UC. Unnecessary entities
are removed from the combinatorics to increase the
relevance of generated scenarios. Based on the UC,
additional information through Layer 7 is determined.
Safely occurring objects are added to the
combinatorics and defined limits, such as speed
specifications, are set. The starting conditions of the
ego vehicle are also specified. The inclusion of these
additional information enables a more targeted and
efficient scenario generation. The track topology and
scenery are created using the objects specified in
Layer 1. During the combination process, the objects
are linked in advance and saved as a “Map”. These
are generated to cover the spatial operation area of the
HADS. In addition, the restriction of certain objects
from appearing in the defined area limit the object
database. By combining the conditions of the UC,
Layer 7 definitions and maps, an initial set of
scenarios is created. This set is used as input for the
subsequent combination process.
During the part of adding Layer 5 objects, each
initial scenario is combined with all possible and
sensible environmental conditions, following specific
rules to ensure logical conditions. For instance, the
occurrence of snow is excluded in combination with
high temperatures. Each final scenario requires
precisely one environmental condition to guarantee
unambiguous definitions. This leads to the first final
set of semantic scenarios. The objects from the
remaining layers are added in ascending order, using
the most recent semantic scenario set as input. The
newly created scenarios are saved to the scenario set
and used as additional initial input for the next layer.
Rules for adding the objects are also established with
the help of the knowledge sources.
For Layers 2 – 4, the first step is to determine the
potential placement of the new object within the
scenario. This is achieved by developing a logic of
referencing. Starting from the initial position of the
ego vehicle, objects are positioned laterally and
longitudinally to the movement path. Simultaneously,
a check is carried out to identify specific object
combinations or irrelevant constellations. It is
important to avoid conflicts by ensuring that no
position in the scenario is filled twice. Certain objects
may have limitations or specific rules depending on
their intended use. For instance, there may be a
predetermined maximum number of an object
allowed in a given scenario, or restrictions on its
possible positions. In the case of Layer 3 objects, it is
important to use a reasonable combination to
determine the maximum number of temporary
changes that can occur simultaneously. When dealing
with Layer 4 objects, it is also important to consider
their movement. Dynamic objects may have a defined
trajectory and move within the scene. It is essential to
avoid unwanted collisions between objects and
ensure that the movement vectors and trajectory paths
are properly set up. Furthermore, the mobility of the
objects enables additional positioning in relation to
the object's orientation and pose. In the final
combination section, Layer 6 objects are included.
These objects are intangible and do not appear in the
scene, but describe states and changes in state of
existing objects or provide additional information for
the automated system.
Our research currently focuses on elaborating
specific combinatorics for ASO. Using the described
procedure and the predefined object database, a first
approach to completeness can be established.
However, it is necessary to set up the combination
rules in a well-founded and comprehensible manner
and to justify any limitations. The implementation of
combinatorics is dependent on the defined ODD and
knowledge base. These affect the limitations of the
database during the combination steps, as well as the
specific rules for adding objects. The basic structure
Knowledge-Based Approach to Generate Scenarios for Testing Highly Automated On-Sight Train Operations
399

of the combination process can be applied to various
ATO-Systems, but object-related specifications and
rules must be adapted or supplemented accordingly.
In the end the output is a final semantic scenario set
that serves as input for further Test Scenario
Derivation.
3.5 Test Scenario Derivation
In order to execute test cases, both in the field and in
a virtual environment, it is necessary to concretize the
abstract semantic scenarios. According to (Menzel et
al., 2018), therefore first logical and then concrete
scenarios are generated by parametrization. Based on
this reliable process, the derivation of test scenarios is
described in the final step of the Scenario Generation.
To implement parameterization, each semantic
variable must be assigned a defined parameter space
that outlines different states of the description. For
example, this enables more detailed specification of
object properties such as size, speed, and positioning.
By defining an increment within the parameter
spaces, specific values can be assigned to each
variable, allowing for the generation of concrete
scenarios for each logical scenario. Finding the
appropriate step size is crucial as it greatly impacts
the number of concrete scenarios. It is important to
strike a balance between generating useful diverse
scenarios and avoiding situations that are only
slightly diffuse. When establishing a meaningful and
logical definition and differentiation in the parameter
space, it is important to consider the influence of
knowledge sources.
At present, we have analysed the derivation of
concrete test scenarios in theoretical form. We are
developing a demonstrative combinatorics based on
our example of ASO. Based on a first proven
semantic scenario set, concrete scenarios will be
derived and tested in a railway-specific virtual
environment (Schäfer et al., 2023).
4 CONCLUSION
The testing of HADS in rail transport is still in its
infancy. New and customised methods need to be
developed and proven in practice. This paper presents
a general process and structure of knowledge-based
railway scenario generation. A proceeding for
defining and deriving scenarios in a systematic, step-
by-step manner has been introduced. However,
further research and work are required to elaborate on
the individual sub-steps, in order to verify the
methodological approach using the example of ASO.
The level of detail in the ODD and the dataset derived
from knowledge should be regularly reviewed. The
combinatoric requires a formal definition of how
individual objects are linked in a given scenario.
Specific rules are established based on the knowledge
sources to manage this data linkage. For this purpose,
a semantic description language is used to define the
dependence of the objects. The implementation of the
semantic language for the combination needs to be
examined more closely. It is crucial to determine
whether an ontology or another semantic conversion
would be more efficient. Moreover, the combination
process must consider object placement and object
variation in more detail. It is important to clarify how
much variability in object positioning and appearance
is required to cause a significant difference in the
scenario. This directly affects the number of scenarios
generated and the performance of the combinatorics.
Once the process has been fully developed, it is
essential to demonstrate its applicability for scenario-
based testing. For the ASO example, it is necessary to
create a comprehensive scenario database, test it, and
evaluate it in a virtual test environment. The results
will be used to verify the meaningfulness and
representativeness of the generated scenarios, as well
as their direct transferability to the field test.
Currently, the method offers a theoretical approach to
generate specific scenarios in the railway sector.
However, it is crucial to conduct thorough virtual
testing and practical evaluation to confirm its
effectiveness.
ACKNOWLEDGEMENTS
This work was partly accomplished within the project
VAL, FKZ 5320000013, EBA Az. 8fd/003-
1255#008-VAL, funded by the German Federal
Ministry of Digital and Transport.
REFERENCES
ASAM e. V. (2024). ASAM OpenSCENARIO® DSL.
https://www.asam.net/
Bagschik, G., Menzel, T., & Maurer, M. (2018). Ontology
based Scene Creation for the Development of
Automated Vehicles. https://arxiv.org/pdf/1704.0100
6.pdf
Bagschik, G., Menzel, T., Reschka, A., & Maurer, M.
(2017). Szenarien für Entwicklung, Absicherung und
Test von automatisierten Fahrzeugen. https://www.pe
gasusprojekt.de/de/lectures-publications
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
400

BEU. (2024). Bundesstelle für Eisenbahnfallunter-suchung.
https://www.eisenbahn-unfalluntersuchung.de/EUB/DE
/Publikationen/publikationen_node.html
British Standards Institution (BSI). (2020). Operational
design domain (ODD) taxonomy for an automated
driving system (ADS). Specification. BSI Standards
Limited. https://www.bsigroup.com/en-GB/
DB Netz AG. (2020). Richtlinien 301 – Signalbuch: Ril301.
DB Kommunikationstechnik GmbH. https://www.dbin
frago.com/web
DB Netz AG. (2021). Richtlinie 408—Züge fahren und
Rangieren: Ril408. DB Kommunikationstechnik
GmbH. https://www.dbinfrago.com/web
Eisenbahn Bau- und Betriebsordnung: EBO, Bundes-
gesetzblatt II (1967). https://www.gesetze-im-
internet.de/ebo/EBO.pdf
Fremont, D. J., Yue, X., Dreossi, T., Ghosh, S.,
Sangiovanni-Vincentelli, A., & Seshia, S. A. (2018).
Scenic: Language-Based Scene Generation. Electrical
Engineering and Computer Sciences University of
California at Berkeley. https://www2.eecs.berkeley.edu/
Greiner-Fuchs, L., Schäfer, S., Hofmeier, T., & Cichon, M.
(2023). 7-Layer Shunting Model: Generische
Szenariobeschreibung automatisierter Rangierfunk-
tionen. International Rail Symposium Aachen, 4. Band.
https://doi.org/10.18154/RWTH-2024-00257
Greiner-Fuchs, L., Schäfer, S., Hofmeier, T., & Cichon, M.
(2022). Database-supported methodical approach for
the development of a toolchain for the evaluation of
ATO functions using a scenario-based test
methodology. Proceedings of the Fifth International
Conference on Railway Technology: Research,
Development and Maintenance. https://doi.org/10.42
03/ccc.1.13.4
Guo, J., Kurup, U., & Shah, M. (2018). Is it Safe to Drive?
An Overview of Factors, Challenges, and Datasets for
Driveability Assessment in Autonomous Driving.
http://arxiv.org/abs/2311.10937
Hao, K., Liu, L., Cui, W., Zhang, J., Yan, S., Pan, Y., &
Yang, Z. (2023). Bridging Data-Driven and
Knowledge-Driven Approaches for Safety-Critical
Scenario Generation in Automated Vehicle Validation.
http://arxiv.org/abs/2311.10937
Hofmeier, T., Greiner-Fuchs, L., Schäfer, S., & Cichon, M.
(2022). Task analysis of a shunting locomotive to derive
use-cases for scenario based tests of ATO Functions.
9th Auto Test Conference, Stuttgart. https://www.re
searchgate.net/
IEC. (2006). IEC 62290-1:2006 Railway applications –
urban guided transport management and
command/control systems – part 1: System principles
and fundamental concepts (IEC 62290–1).
Meng, Z., Tang, T., Wei, G., & Yuan, L. (2021). Analysis
of ATO System Operation Scenarios Based on
UPPAAL and the Operational Design Domain.
Electronics, 10(4). https://doi.org/10.3390/electronics1
0040503
Menzel, T., Bagschik, G., Isensee, L., Schomburg, A., &
Maurer, M. (2018). Detaillierung einer stich-
wortbasierten Szenariobeschreibung für die Durch-
führung in der Simulation am Beispiel von Szenarien
auf deutschen Autobahnen. Workshop Fahrer-
assistenzsysteme und automatisiertes Fahren, 12.
https://www.uni-das.de/
Pegasus. (2020). Projekt zur Etablierung von generell
akzeptierten Gütekriterien, Werkzeugen und Methoden
sowie Szenarien und Situationen zur Freigabe
hochautomatisierter Fahrfunktionen. https://www.pega
susprojekt.de
Powell, J. P., Fraszczyk, A., Cheong, C. N., & Yeung, H.
K. (2016). Potential Benefits and Obstacles of
Implementing Driverless Train Operation on the Tyne
and Wear Metro: A Simulation Exercise. Urban Rail
Transit, 2(3–4). https://doi.org/10.1007/s40864-016-
0046-9
Riedmaier, S., Ponn, T., Ludwig, D., Schick, B., &
Diermeyer, F. (2020). Survey on Scenario-Based Safety
Assessment of Automated Vehicles. IEEE Access, 8.
https://doi.org/10.1109/ACCESS.2020.2993730
SAE International. (2021). SAE J3016. 2021 SAE
International/ISO. https://www.sae.org/content/12-03-
01-0003/
Schäfer, S., Greiner-Fuchs, L., Hofmeier, T., Koch, P., &
Cichon, M. (2023, April). Virtual Validation Method of
Automated On-Sight Driving Systems for Shunting
Operations. BOOK OF ABSTRACTS. 10th International
Conference on Railway Operations Modelling and
Analysis (ICROMA), Belgrade, Serbia. https://doi.org/
10.37528/FTTE/9788673954677/RailBelgrade.2023.ZE
Scholtes, M., Westhofen, L., Turner, L. R., Lotto, K.,
Schuldes, M., Weber, H., Wagener, N., Neurohr, C.,
Bollmann, M. H., Kortke, F., Hiller, J., Hoss, M., Bock,
J., & Eckstein, L. (2021). 6-Layer Model for a
Structured Description and Categorization of Urban
Traffic and Environment. IEEE Access, 9.
https://doi.org/10.1109/ACCESS.2021.3072739
Schuldt, F. (2017). Ein Beitrag für den methodischen Test
von automatisieren Fahrfunktionen mit Hilfe von
virtuellen Umgebungen. http://publikationsserver.tu-
braunschweig.de/
Tonk, A., Boussif, A., Beugin, J., & Collart-Dutilleul, S.
(2021). Towards a Specified Operational Design
Domain for a Safe Remote Driving of Trains.
Proceedings of the 31st European Safety and Reliability
Conference (ESREL 2021). https://doi.org/10.3850/97
8-981-18-2016-8 504-cd
Ulbrich, S., Menzel, T., Reschka, A., Schuldt, F., & Maurer,
M. (2015, September). Defining and Substantiating the
Terms Scene, Situation, and Scenario for Automated
Driving. 2015 IEEE 18th International Conference on
Intelligent Transportation Systems. https://doi.org/
10.1109/ITSC.2015.164
VVM. (2022, September 28). Verification Validation
Methods. VVM Projekt. https://www.vvm-projekt.de/
Zintel, M., Pluchet, J., Hensler, A., Bamberger, V., Baron,
R., & Watson, S. (2023). Rail 2040. Arthur D. Little.
https://www.adlittle.com/sa-en/insights/report/rail-
2040
Knowledge-Based Approach to Generate Scenarios for Testing Highly Automated On-Sight Train Operations
401
