
Integrated Driver Pose Estimation for Autonomous Driving
Xiao Cao
1,2
, Wei Hu
2a
and Hui Liu
3b
1
Shanghai Electric Automation Group, 200023, Shanghai, China
2
School of Mechanical and Aerospace Engineering, Nanyang Technological University, 639798, Singapore
3
Cognitive System Lab, University of Bremen, 28359, Bremen, Germany
Keywords: Computer Vision, Autonomous Driving, Driver Posture Estimation, Human-Machine Interaction.
Abstract: Human-machine interaction, especially driver posture estimation is important to the development of
autonomous driving, which can facilitate safe and smooth driving behaviours. Besides, it also contributes to
ergonomics research and human-machine interaction design for automated vehicles. The existing studies have
got great achievements in body estimation, hand pose estimation, and even face feature estimation thanks to
the rapid development of deep learning approaches and the upgrade of hardware equipment. However, most
existing models can only process body estimation or hand estimation separately, which will impede the
research on driver-vehicle interaction in autonomous driving. This is because the driving process is highly
dependent on the cooperation between the body and hands behaviours. In this study, five popular deep
learning models, including Simple Faster R-CNN, RootNet, PoseNet, Yolo v3, and graph convolutional neural
network, are combined through a cascade method to develop an integrated model which can estimate body
and hand simultaneously during the driving process. The coordinate transform system is proposed to connect
models in series. Experiment results demonstrate the proposed method can produce 2D and 3D reorganization
of the human body and hands simultaneously with acceptable accuracy.
1 INTRODUCTION
Autonomous driving exhibits rapid progress in recent
years due to its substantial application value and
potential societal implications. Human pose
estimation technology is crucial in autonomous
driving, particularly with the growing possibility of
automated vehicles navigating congested roads,
which allows for instantaneous tracking of driver
motion, enhancing driver requirements, and
identifying potential safety risks. Many advanced
functions including operation simplification, fatigue
detection, and behaviour analysis can be developed
based on driver gesture research. Besides,
autonomous driving can be made to resemble human
driving to the greatest extent possible through
observing and recording driver behaviours.
The advancements in photograph acquisition
technologies and deep learning approaches have led
to significant progress in human pose estimation
technology, which has been implemented in many
domains like security systems and smart payment.
a
https://orcid.org/0000-0001-7058-939X
b
https://orcid.org/0000-0002-6850-9570
However, for autonomous driving, most
implementations only focus on specific body parts
like the body or hand, which ignores the correlation
and coordination among different human body parts
during driving behaviour and results in limited
progress in driver behaviour studies.
This research aims to develop an integrated model
to estimate hands and body simultaneously by
deploying the proposed cascade method on 5
mainstream computer vision models. Subsequently,
2D and 3D skeleton diagrams have been generated
and the accuracy of the proposed method has been
verified. However, due to the scarcity of public
datasets on whole-body, the performance of the
developed model can only be evaluated by
visualization.
The rest of this article is organized as follows:
Section 2 introduces the existing works in relevant
fields. Section 3 presents the principles and pipeline
of the proposed method. Section 4 illustrates the
details of experiments and results while the
conclusion and discussion are presented in Section 5.
Cao, X., Hu, W. and Liu, H.
Integrated Driver Pose Estimation for Autonomous Driving.
DOI: 10.5220/0012639400003657
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 17th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2024) - Volume 1, pages 695-702
ISBN: 978-989-758-688-0; ISSN: 2184-4305
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
695

2 LITERATURE REVIEW
2.1 Human Detection
Human detection models are designed to identify the
presence and location of humans in images or video
frames, it is derived from objection models, which
have been developed for decades. Current popular
objection models contain Region-based
Convolutional Neural Networks (R-CNN) and You
Only Look Once (Yolo) families.
R-CNN family is the most popular framework for
object detection and includes several categories like
basic R-CNN, Fast R-CNN, and Mask R-CNN. R-
CNN has founded the basis for the current region-
based object detection methods (Girshick et al., 2014)
and the main idea is to select a certain number of
regions of interest to conduct the image classification
randomly or empirically. The limitation is that the
region size warp process may damage the original
information and result in unexpected errors and
unsatisfying accuracy. To address the issue, Spatial
Pyramid Pooling in Deep Convolutional Networks
(SPPnet) was developed utilizing grids meshing and
features concatenating approach (He et al., 2014), and
Fast R-CNN employed this approach to construct the
Region of Interest (RoI) pooling layer, which brought
the object detection into a new era. Besides, faster R-
CNN introducing region proposal network (RPN)
rather than conventional selective search to produce
region proposals (Mueller et al., 2017), which
improves the time-efficiency and facilities the
development of multi-scale detection. Mask R-CNN
is a convenient and flexible general object instance
segmentation neural network (He et al., 2017), which
can not only realize object detection but also generate
segmentation results for each target.
Recently, the Yolo methodology also attracted the
attention of researchers because of its excellent
performance. Unlike R-CNN methods, Yolo v1
(Redmon et al., 2016) treats the object detection task
as a regression problem instead of region detection.
The main difference between Yolo and R-CNN
families is that global information can be analysed
rather than local information from sliding windows or
region proposals approach. This allows for the
acquisition of highly generalized features, which
outperform previous object detection algorithms and
can be migrated to related fields. Though the initial
Yolo model had some limitations, such as lower
accuracy and speed compared to some state-of-the-art
object detection models, which were addressed in
subsequent versions. Yolo v2 and v3 utilized
improved network architectures and advanced
training techniques, such as batch normalization and
residual connections, to enhance detection accuracy.
At present, Yolo v3 is a well-respected algorithm
considering both maturity and training performance
(Gkioxari et al., 2018). The Yolo family comprises a
range of object detection algorithms that are well-
known for their remarkable processing speed.
Additionally, the CornerNet approach, which relies
on key point-based object detection, has also
demonstrated high efficiency and accuracy (Law &
Deng, 2018). Notably, the recently proposed
CornerNet-Lite, an improved version of CornerNet,
has achieved both higher speed and superior
performance compared to Yolo v3 (Hei Law, Yun
Teng, Olga Russakovsky, 2019).
2.2 Body Pose Estimation
The estimation results of human body estimation
models are always represented by the several key
points on a specific skeleton and the methodology is
roughly divided into three categories: 3D pose
tracking, 2D-3D pose lifting, and pose regression
from images. As the models selected in this project
are all based on deep learning and neural network, the
dissertation would focus on the last two methods,
especially the deep learning-based methods. Pavllo et
al.(Pavllo et al., 2019) processed the detected key
points by a fully convolutional architecture that is
compatible with the 2D joints detector to predict the
coordinates effectively, while in (Ge et al., 2019) the
3D pose estimation is treated as a regression problem
of Euclidean Distance Matrices (EDM) to capture
more information about pairwise correlations
between key points.
Pose Regression from Image can overcome the
inherent ambiguity generated by encoding and
decoding between 2D pose estimation and 2D to 3D
lifting. Mehta et al.(Mehta et al., 2020) developed an
estimation model to evaluate the level of similarity
between the target 3D pose and the input image. Zhou
et al.(Zhou et al., 2016) treated a kinematic object
model as the prior knowledge in the neural network
to optimize the articulated object pose estimation.
2.3 Hand Estimation
Hand estimation has great significance in the
development of human-computer interaction with a
long development period. Generally, hand estimation
can be divided into three categories: discriminative
approach, generative approach and hybrid approach.
The discriminative method processes the image and
predicts the pose of the hand from the image directly,
BIOSIGNALS 2024 - 17th International Conference on Bio-inspired Systems and Signal Processing
696
while the generative method prepares a hand model
previously and tries to match the hand model to the
input image, and the Hybrid method is the
combination of two approaches (Barsoum, 2016).
Barsoum (Tompson et al., 2014) created labelled
ground-truth data and developed the Pose Recovery
model to estimate human hands from single-depth
images. Oikonomidis et al.(Iasonas Oikonomidis,
Nikolaos Kyriazis, 2011) treated the hand estimation
as an optimization problem where the hand model
parameters had to be determined to minimize the
error between the preprepared models and the
processed input image. Besides, Oikonomidis et
al.(Oikonomidis et al., 2011) resented a similar
method, where the discrepancy is quantified between
the actual features and predicted features extracted
from the observation and then minimized to the
expected value by improving the parameters. Finally,
the improved parameters are decoded to obtain the 3D
hand pose.
2.4 Dataset
Benchmark datasets with ground truth annotations are
critically important but the dataset establishment is
usually difficult (Erol et al., 2007). Some popular
datasets related to the human body and hands are
listed below.
Table 1: Body datasets.
Dataset Descri
p
tion
HumanEva
(Mehta et al.,
2018)
4 people, 810
samples, Marker-
based MoCap in indoor
Human3.6M
(von Marcard
et al., 2018)
11 people, 360 10
samples, Marker-
based MoCap in indoor
Total Capture
(Sharp et al.,
2015
)
5 people, 190 10
samples, Marker-
based MoCap along with IMUs in indoor
MPI-INF-
3DHP
(Barsoum,
2016)
8 people,130 10
samples, Marker
less MoCap in both indoor and outdoor
3DPW
(Oikonomidis
et al., 2011
)
5 people, 510
samples, 3D human
poses captured with IMUs in outdoor
Table 2: Hands datasets.
Dataset Descri
p
tion
Hand-Object
Interaction
(Hamer et al.,
2010
)
Hand-Object, rigid & articulated
objects, 60 sequences, 10 objects
shapes
ETHZ (Ballan et
al., 2012
)
Hand-Hand/Hand-Object, rigid &
articulated ob
j
ects, 7 se
q
uences
Hands in Action
(Tzionas et al.,
2016
)
Hand-Hand/Hand-Object, rigid &
articulated objects, 29 sequences with
a lar
g
e variet
y
of interactions
Dexter & Object
(Sridhar et al.,
2016
)
Hand-Object, rigid objects, simple
object shape(cube), 6 sequences with 2
actors and with 2 ob
j
ects sha
p
es
EgoDexter
(Mueller et al.,
2017)
Hand-Object, rigid & articulated
objects, 4 sequences with 4 actors,
various objects and cluttered
b
ack
g
roun
d
3 METHOD
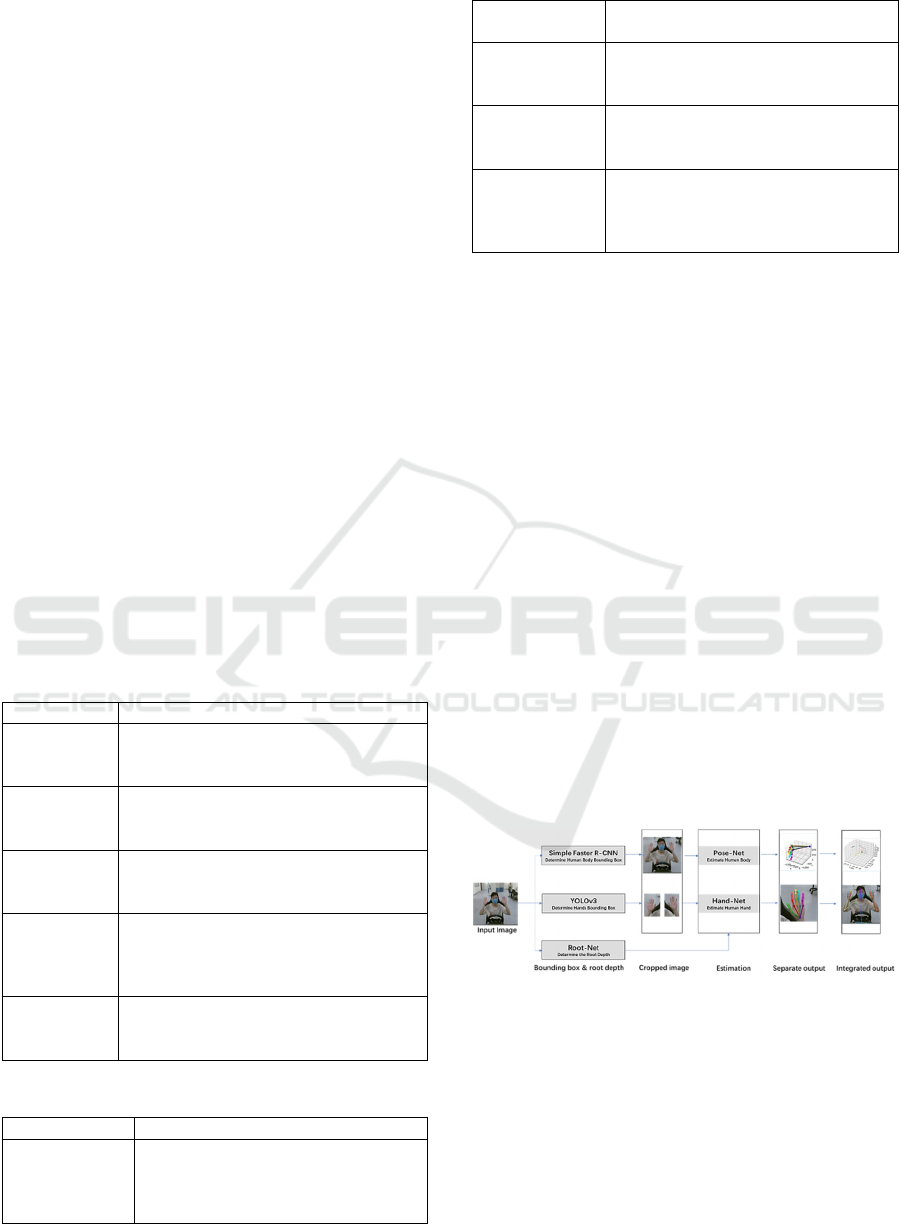
3.1 Overview
To realize the estimation of the body and hand
simultaneously by one integrated model, the
following pipeline (Fig. 1) has been designed: At
first, the image is processed by Fast RCNN and Yolo
v3 models to determine the bounding boxes for the
human body and hands, respectively. Simultaneously,
the original image is fed into RootNet to predict the
root depth, which represents the absolute distance
between the human and the camera. Subsequently,
based on the bounding boxes, the image is cropped to
isolate the corresponding sections comprising the
human body and hands. Then PoseNet and HandNet
models are utilized to estimate the body and hands
using cropped images and root depth, and then their
outputs are decoded to obtain 2D estimation and 3D
skeleton of the hand and body. Finally, the integrated
results are generated utilizing the overlapping and the
coordinate transformation approach.
Figure 1: The pipeline of the proposed model.
3.2 Bounding Box
3.2.1 Body Bounding Box
The body bounding box should be generated before
the estimation to clear the object for the subsequent
model, which can avoid the error caused by the
difference between the size of the image and the
human. In this research, the Simple Faster R-CNN
Integrated Driver Pose Estimation for Autonomous Driving
697

(Ren et al., 2017) model is utilized to identify the
bounding box in the image, which contains a fully
convolutional network for feature map generation and
a regional proposal network for processing. The
processed feature is fed into a box-regression layer
and a box-classification layer, and then the original
image is cropped based on the bounding box
parameters to get the image of the human.
3.2.2 Hand Bounding Box
Yolo v1 is utilized to predict large-size objects,
whereas Yolo v2 and Yolo v3 are better suitable for
medium and small-size objects. So, the Yolo v3
(Redmon & Farhadi, 2018) is utilized to predict the
hands-bounding box, which is composed of the
backbone and Darknet Building Block (DBL). The
backbone contains the convolutional and residual
network for object features extraction, while the DBL
is composed of convolutional layers, batch
normalization, and activation layers, which are used
to predict the object and generate the bounding box.
3.3 Root Depth
The root depth estimation model is used to predict the
camera-centred coordinate of key points of humans
from the cropped image of people processed by the
detection model. And the RootNet (Moon et al., 2019)
proposed by Moon et al. has been utilized in this
section. The network contains three modules for
feature extraction, coordinate estimation, and depth
estimation. The loss function is defined as follows:
𝐿
‖
𝑅𝑅
∗
‖
(1)
Where R is the predicted root depth while 𝑅
∗
represents the ground-truth root depth.
3.4 Estimation Net
3.4.1 PoseNet
The input is the cropped image based on the body
bounding box and the integral regression method
(Sun et al., 2018) is applied. It contains the backbone
modules for feature extraction and poses estimation
for 3D heatmap generations. The PoseNet is trained
by minimizing 𝐿
distance between groundtruth
coordinates and the predicted results. The loss
function is defined as follows:
𝐿
1
𝐽
𝑃
𝑃
∗
(2)
Where represents 𝑃
predicted coordinates and
𝑃
∗
represents the ground-truth coordinates.
3.4.2 HandNet
Based on the hand bounding box, the image is
cropped to get two hand images relatively and they
are fed into a hand estimation network to get the 3D
and 2D results. Graph convolutional neural network
(Ge et al., 2019) has been selected as the method.
Firstly, the image passes through a two-stacked
hourglass network to extract the feature maps and 2D
heat maps, which are then processed and encoded as
a latent feature vector by a residual network.
Secondly, the latent feature is put into a Graph CNN
to predict the 3D coordinates of mech vertices.
Finally, the 3D hand pose is linearly regressed from
the 3D hand mesh. The pose loss function is defined
as follows:
𝐿
∑
𝜑
𝜑
(3)
Where 𝜑
denotes the ground-truth 3D joint
locations while 𝜑
is the estimated 3D joint
locations.
3.5 2D and 3D Integration
The 2D or 3D skeleton diagram of the body and hands
are generated by pose and hand estimation models
respectively. For the 2D integration, the 2D outputs
can be directly achieved by overlapping the 2D body
and 2D hands results based on common joint points.
For 3D integration, the hand coordinates system can
be transformed into the body coordinate system
through a linear transformation with at least three sets
of coordinates. Two common key points, the root of
the hand and middle finger can be utilized as the first
two sets and the root of the index finger is chosen to
be the third set of coordinates, which has been
contained in the hand coordinate system. The
information of the root of the index finger in the body
coordinate system can be predicted by rotating the
coordinate of the root of the middle finger by 15°
counterclockwise or clockwise on the palm plane.
The rotation matrix is shown in Eq. 4, where 𝑅
𝜃
represents rotation matrix with 𝜃
rotation angle
around axis (x,y,z).
Figure 2: Transformation pipeline and hand estimation.
BIOSIGNALS 2024 - 17th International Conference on Bio-inspired Systems and Signal Processing
698

𝑅
𝜃
10 0
0𝑐𝑜𝑠𝜃
𝑠𝑖𝑛𝜃
0𝑠𝑖𝑛𝜃
𝑐𝑜𝑠𝜃
𝑅
𝜃
𝑐𝑜𝑠𝜃
0𝑠𝑖𝑛𝜃
010
𝑠𝑖𝑛𝜃
0𝑐𝑜𝑠𝜃
(4)
𝑅
𝜃
𝑐𝑜𝑠𝜃
𝑠𝑖𝑛𝜃
0
𝑠𝑖𝑛𝜃
𝑐𝑜𝑠𝜃
0
001
The coordinate of the root of the index finger (𝐼)
can be computed by Eq. 5, where 𝑅
is rotation
transformations (x,y,z) and 𝑀 means coordinate of
the root of the middle finger.
𝐼𝑅
∗𝑀 (5)
Then, the transformation matrix can be calculated
by the three sets of 3D coordinates. Assume that the
three sets of coordinates in hand and body coordinate
systems are represented as 𝑋
( 𝑋𝐴,𝐵,𝐶;𝑖
ℎ𝑎𝑛𝑑 𝑜𝑟 𝑏𝑜𝑑𝑦 𝑐𝑜𝑜𝑟𝑑𝑖𝑛𝑎𝑡𝑒 𝑠𝑦𝑠𝑡𝑒𝑚). Suppose that
all these coordinates are raw matrix, and the inverse
matrix is as Eq. 6 while the transformed coordinates
of the hand coordinate system can be derived by Eq.
7, where 𝐽
represent the joint coordinates of the hand
or body coordinate system.
𝐼𝑛𝑣 𝑚𝑎𝑡𝑟𝑖𝑥 ∙
𝐴
𝐵
𝐶
𝐴
𝐵
𝐶
(6)
4 EXPERIMENT
4.1 Equipment
An experiment platform has been utilized to simulate
the driving process, which contains three display
screens, two monitors, a seat, and a steering wheel
(Fig.3). The steering wheel (Logitech G29) can
generate realistic force feedback, making the details
of the driver’s hand movements much more
realistically when driving while the monitors are used
to record the driver posture.
Figure 3: Experiment environment.
4.2 Implementation Environment
This project was conducted mainly in Python based
on the Ubuntu system. The following main open-
source libraries were installed in a virtual
environment: Python3.8, OpenCV, Scikit-image,
tqdm, fire, pprint, Pillow, Keras, Pytorch,
torchvision, cpython, ipdb, numpy, scipy, yacs,
Matplotlib.
4.3 Result and Discussion
Unlike the hand estimation and body estimation
models which have enough datasets to evaluate their
performance, we have not found public datasets that
evaluate the performance of the model estimating
hand and body simultaneously has been created.
Hence, the integrated model utilises 1126 images
extracted from a video collected by the Microsoft
Kinect and the model performance is evaluated by the
results observation of these images. The performance
is divided into 3 levels. Level 1, both 2D and 3D
estimation are perfect, which means that the predicted
2D joint locations are matched with the origin 2D
image, and 3D output is evaluated manually as
reasonable without considering accurate error. Level
2, the 2D estimation is perfect but the 3D estimation
has some problems. For example, the hand is
squeezed into a line, the hand size is problematic, and
the pose or gesture is unreasonable. Level 3, the 2D
estimation and 3D estimation are both unexpected,
which means the predicted joint points of 2D outputs
are not fitted to the actual joint points correctly.
Finally, 88% of results are in level 1 and level 2,
which is acceptable accuracy and performance. The
output of the integrated model contains estimations of
hand, body pose, and the combination of hand and
body pose in 2D and 3D formats. Only the
combination of hand and body pose is shown because
of our research focus. Some perfect visualization
results are shown in Fig. 4 while some problematic
results are shown in Fig. 5-7.
Integrated Driver Pose Estimation for Autonomous Driving
699

Figure 4: The visualization of results.
In Fig. 5 the 2D outputs are perfect, where the
joints of both hand and body are predicted exactly.
However, the right hand of 3D outputs is squeezed
into a line. One possible reason is that the created
joints have an error due to the incorrect rotation
direction and angle. Another factor is that the root of
the hand of these two models is not matched. From
2D outputs, it’s clear that the key points of the hand
root failed to match, which means the same issues in
3D outputs.
Figure 5: The result with the hand squeezed into a line.
Fig. 6 illustrates the unreasonable size of the 3D
output, especially the human hands. The 3D outputs
of hand parts are nearly shrunk to one point. As the
output of the hand estimation model is correct, the
potential problem is from the rotation transformation.
The essential factors of this problem are similar to the
estimated hand squeezed into a line.
Figure 6: The result with the hands shrunk to one point.
The third main problem is the incorrect
estimation. From Fig. 7, the hand joints of 2D output
are unacceptable and the key point representing the
hand root is located outside of the hand in 3D outputs.
The main factor is that the selected hand estimation
model failed to predict the joints, which means that
the robustness of the model is not perfect.
Figure 7: The result with incorrect hand estimation.
In conclusion, despite the high proportion of
feasible outputs, it does exist some unexpected
results, especially 3D output. There are three main
reasons: 1. The robustness of the selected model is not
perfect, which means some postures cannot be
recognized successfully. 2. Some errors may exist in
the coordination of hand estimation and body
estimation. 3. The rotation transformation is not
precise enough, especially for some complex
gestures.
5 CONCLUSION
This paper proposed an integrated method based on
five existing models to achieve the estimation of body
and hands simultaneously and the model performance
and potential problems are analysed based on the
experiment. Besides, human body poses, and hand
estimation-related techniques and models have been
reviewed. Drive estimation is truly one of the most
important topics in autonomous driving, and an
important problem is that there are no publicly
available datasets for the whole-body including
details of hand, body pose and face, which means that
there is no authoritative and recognized evaluation
method to measure the performance of the integrated
model. Despite this study having defined a simple
evaluation standard, it is based on manual observation
which is not strict and persuading enough. Hence, the
public and recognized evaluation criteria are
necessary.
In the future, more accurate rotation
transformation methods or other approaches should
be developed to avoid the inconsistency between the
key points of hand estimation and body pose
estimation. Besides, more models should be
integrated to create a new model to estimate the
human body, hands, feet, face, and other parts of the
body simultaneously. More importantly, the publicly
available datasets catering for the whole-body
estimation and an evaluation method should be
created.
BIOSIGNALS 2024 - 17th International Conference on Bio-inspired Systems and Signal Processing
700

REFERENCES
Ballan, L., Taneja, A., Gall, J., Van Gool, L., & Pollefeys,
M. (2012). Motion capture of hands in action using
discriminative salient points. Proceedings of European
Conference on Computer Vision, 7577 LNCS(PART 6),
640–653. https://doi.org/10.1007/978-3-642-33783-
3_46
Barsoum, E. (2016). Articulated Hand Pose Estimation
Review. 1–50. http://arxiv.org/abs/1604.06195
Erol, A., Bebis, G., Nicolescu, M., Boyle, R. D., &
Twombly, X. (2007). Vision-based hand pose
estimation: A review. Computer Vision and Image
Understanding, 108(1–2), 52–73. https://doi.org/
10.1016/j.cviu.2006.10.012
Ge, L., Ren, Z., Li, Y., Xue, Z., Wang, Y., Cai, J., & Yuan,
J. (2019). 3D hand shape and pose estimation from a
single RGB image. Proceedings of the IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition, 2019-June, 10825–10834. https://doi.org/
10.1109/CVPR.2019.01109
Girshick, R., Donahue, J., Darrell, T., & Malik, J. (2014).
Rich feature hierarchies for accurate object detection
and semantic segmentation. Proceedings of the IEEE
Computer Society Conference on Computer Vision and
Pattern Recognition, 580–587. https://doi.org/
10.1109/CVPR.2014.81
Gkioxari, G., Girshick, R., Dollár, P., & He, K. (2018).
Detecting and Recognizing Human-Object Interactions.
Proceedings of the IEEE Computer Society Conference
on Computer Vision and Pattern Recognition, 1(c),
8359–8367. https://doi.org/10.1109/CVPR.2018.00872
Hamer, H., Gall, J., Weise, T., & Van Gool, L. (2010). An
object-dependent hand pose prior from sparse training
data. Proceedings of the IEEE Computer Society
Conference on Computer Vision and Pattern
Recognition, 671–678. https://doi.org/10.1109/CVP
R.2010.5540150
He, K., Gkioxari, G., Dollar, P., & Girshick, R. (2017).
Mask R-CNN. Proceedings of the IEEE International
Conference on Computer Vision, 2017-Octob, 2980–
2988. https://doi.org/10.1109/ICCV.2017.322
He, K., Zhang, X., Ren, S., & Sun, J. (2014). Spatial
pyramid pooling in deep convolutional networks for
visual recognition. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 8691 LNCS(PART
3), 346–361. https://doi.org/10.1007/978-3-319-10578-
9_23
Hei Law, Yun Teng, Olga Russakovsky, J. D. (2019).
CornerNet-Lite : Efficient Keypoint-Based Object
Detection.
Iasonas Oikonomidis, Nikolaos Kyriazis, and A. A. A.
(2011). Markerless and Efficient 26-DOF Hand Pose
Recovery. Proceedings of the 10th Asian Conference
on Computer Vision, 6978 LNCS(PART 1), 365–373.
https://doi.org/10.1007/978-3-642-24085-0_38
Law, H., & Deng, J. (2018). CornerNet. European
Conference on Computer Vision(ECCV), 765–781.
Mehta, D., Rhodin, H., Casas, D., Fua, P., Sotnychenko, O.,
Xu, W., & Theobalt, C. (2018). Monocular 3D human
pose estimation in the wild using improved CNN
supervision. Proceedings - 2017 International
Conference on 3D Vision, 3DV 2017, 506–516.
https://doi.org/10.1109/3DV.2017.00064
Mehta, D., Sotnychenko, O., Mueller, F., Xu, W., Elgharib,
M., Fua, P., Seidel, H. P., Rhodin, H., Pons-Moll, G., &
Theobalt, C. (2020). XNect: Real-time Multi-Person
3D Motion Capture with a Single RGB Camera. ACM
Transactions on Graphics, 39(4), 1–24.
https://doi.org/10.1145/3386569.3392410
Moon, G., Chang, J. Y., & Lee, K. M. (2019). Camera
distance-aware top-down approach for 3D multi-person
pose estimation from a single RGB image. Proceedings
of the IEEE International Conference on Computer
Vision, 2019-Octob, 10132–10141. https://doi.org/
10.1109/ICCV.2019.01023
Mueller, F., Mehta, D., Sotnychenko, O., Sridhar, S., Casas,
D., & Theobalt, C. (2017). Real-Time Hand Tracking
under Occlusion from an Egocentric RGB-D Sensor.
Proceedings of the IEEE International Conference on
Computer Vision, 2017-Octob, 1163–1172.
https://doi.org/10.1109/ICCV.2017.131
Oikonomidis, I., Kyriazis, N., & Argyros, A. (2011).
Efficient model-based 3D tracking of hand
articulations using Kinect. June 2014, 101.1-101.11.
https://doi.org/10.5244/c.25.101
Pavllo, D., Feichtenhofer, C., Grangier, D., & Auli, M.
(2019). 3D human pose estimation in video with
temporal convolutions and semi-supervised training.
Proceedings of the IEEE Computer Society Conference
on Computer Vision and Pattern Recognition, 2019-
June, 7745–7754. https://doi.org/10.1109/CVPR.201
9.00794
Redmon, J., Divvala, S., Girshick, R., & Farhadi, A. (2016).
You only look once: Unified, real-time object detection.
Proceedings of the IEEE Computer Society Conference
on Computer Vision and Pattern Recognition, 2016-
Decem, 779–788. https://doi.org/10.1109/CVPR.20
16.91
Redmon, J., & Farhadi, A. (2018). YOLOv3: An
Incremental Improvement. http://arxiv.org/abs/1804.0
2767
Ren, S., He, K., Girshick, R., & Sun, J. (2017). Faster R-
CNN: Towards Real-Time Object Detection with
Region Proposal Networks. IEEE Transactions on
Pattern Analysis and Machine Intelligence, 39(6),
1137–1149. https://doi.org/10.1109/TPAMI.2016.257
7031
Sharp, T., Keskin, C., Robertson, D., Taylor, J., Shotton, J.,
Kim, D., Rhemann, C., Leichter, I., Vinnikov, A., Wei,
Y., Freedman, D., Kohli, P., Krupka, E., Fitzgibbon, A.,
& Izadi, S. (2015). Accurate, robust, and flexible
realtime hand tracking. Conference on Human Factors
in Computing Systems - Proceedings
, 2015-April,
3633–3642. https://doi.org/10.1145/2702123.2702179
Sridhar, S., Mueller, F., Zollhöfer, M., Casas, D.,
Oulasvirta, A., & Theobalt, C. (2016). Real-time joint
tracking of a hand manipulating an object from RGB-D
input. International Journal of Computer Vision, 9906
Integrated Driver Pose Estimation for Autonomous Driving
701

LNCS, 294–310. https://doi.org/10.1007/978-3-319-
46475-6_19
Sun, X., Xiao, B., Wei, F., Liang, S., & Wei, Y. (2018).
Integral human pose regression. Proceedings of the
European Conference on Computer Vision (ECCV),
11210 LNCS, 536–553. https://doi.org/10.1007/978-3-
030-01231-1_33
Tompson, J., Stein, M., Lecun, Y., & Perlin, K. (2014).
Real-time continuous pose recovery of human hands
using convolutional networks. ACM Transactions on
Graphics, 33(5). https://doi.org/10.1145/2629500
Tzionas, D., Ballan, L., Srikantha, A., Aponte, P.,
Pollefeys, M., & Gall, J. (2016). Capturing Hands in
Action Using Discriminative Salient Points and Physics
Simulation. International Journal of Computer Vision,
118(2), 172–193. https://doi.org/10.1007/s11263-016-
0895-4
von Marcard, T., Henschel, R., Black, M. J., Rosenhahn, B.,
& Pons-Moll, G. (2018). Recovering accurate 3D
human pose in the wild using IMUs and a moving
camera. Proceedings of the European Conference on
Computer Vision (ECCV), 2018, 11214 LNCS, 614–
631. https://doi.org/10.1007/978-3-030-01249-6_37
Zhou, X., Sun, X., Zhang, W., Liang, S., & Wei, Y. (2016).
Deep kinematic pose regression. Lecture Notes in
Computer Science (Including Subseries Lecture Notes
in Artificial Intelligence and Lecture Notes in
Bioinformatics), 9915 LNCS(March 2017), 186–201.
https://doi.org/10.1007/978-3-319-49409-8_17
BIOSIGNALS 2024 - 17th International Conference on Bio-inspired Systems and Signal Processing
702
