
Improving Lane Level Dynamics for EV Traversal: A Reinforcement
Learning Approach
Akanksha Tyagi, Meghna Lowalekar and Praveen Paruchuri
International Institute of Information Technology Hyderabad (IIIT-H), Hyderabad, India
Keywords:
Reinforcement Learning, Emergency Vehicles, Lane Level Dynamics.
Abstract:
Emergency vehicles (EVs) perform a critical task of attending medical emergencies and delay in their opera-
tions can result in loss of lives to long term or permanent health implications. Therefore, it is very important
to design strategies that can reduce the delay of EVs caused by slow moving traffic. Most of the existing work
on this topic focuses on assignment and dispatch of EVs from different base stations to hospitals or finding the
appropriate routes from dispatch location to hospital. However, these works ignore the effect of lane changes
when EV is travelling on a stretch of a road. In this work, we focus on lane level dynamics for EV traversal
and showcase that a pro-active picking of lanes can result in significant reductions in traversal time. In partic-
ular, we design a Reinforcement Learning (RL) model to compute the most optimal lane for an EV to travel
at each timestep. We propose RLLS (Reinforcement Learning based Lane Search) algorithm for a general
purposes EV traversal problem and perform a series of experiments using the well-known traffic simulator
SUMO. Our experimentation demonstrates that our model outperforms the default SUMO algorithm and is
also significantly better than the existing state-of-the-art heuristic approach BLS (Best Lane Search) strategy
in normal traffic conditions. We also simulate worst case scenarios by introducing slowed down vehicles at
regular time intervals into the traffic and observe that our model generalizes well to different traffic scenarios.
1 INTRODUCTION
Emergency vehicles (EV) are a class of vehicles
which include ambulances, fire trucks, police cars etc.
They are dispatched from their base stations to disas-
ter site to respond to medical emergency, fire disaster
among others. Any small delay in their operation can
result in loss of life or long term damage or implica-
tions to health. Hence, even a small improvement in
their traversal time can have significant impact. In the
case of any medical emergency or disaster, a call is
sent to a helpline such as 911 and upon receiving the
call, the helpline connects with the appropriate base
station to dispatch the EV. There are multiple criti-
cal decisions here which can have an impact on the
overall response time. The first decision is, which
base station should dispatch the EV vehicle (Ghosh
and Varakantham, 2018; Haghani et al., 2003; Joe
et al., 2022). The second decision is, what is the route
that the EV will take to travel from the base station
to emergency site and then from the emergency site
to hospital(s) (Giri et al., 2022; Su et al., 2022). The
third decision which is mostly overlooked is, when
an EV enters a stretch of road in its route, which
lane should the EV travel on (Agarwal and Paruchuri,
2016; Cao and Zhao, 2022). As demonstrated in ear-
lier works (Agarwal and Paruchuri, 2016), the lane
level dynamics can also play a crucial role in reducing
the EV traversal time and hence the overall response
time resulting in saving more lives and reduction of
long term health implications. The existing work re-
lies on heuristic approaches for lane level dynamics
which can be myopic in nature and hence cannot cap-
ture the long term effect of decisions. Therefore, in
this work we focus on improving the lane level dy-
namics for EV traversal using a reinforcement learn-
ing approach.
Our first contribution is to model the problem of
lane level dynamics of EV using Markov Decision
Process (MDP) (Puterman, 2014). The modelling of
the problem as MDP allows us to use reinforcement
learning algorithm to learn the best way to choose the
appropriate lane for the EV to travel at each timestep.
We propose RLLS - a Reinforcement Learning based
Lane Search which uses the Advantage Actor-Critic
method (Mnih et al., 2016) to learn the MDP pol-
icy. We compare RLLS with the baseline approaches
using the SUMO (Simulation of Urban MObility)
134
Tyagi, A., Lowalekar, M. and Paruchuri, P.
Improving Lane Level Dynamics for EV Traversal: A Reinforcement Learning Approach.
DOI: 10.5220/0012637200003702
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 10th International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2024), pages 134-143
ISBN: 978-989-758-703-0; ISSN: 2184-495X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

(Lopez et al., 2018) traffic simulator, which simulates
real traffic scenarios. SUMO offers a designated ve-
hicle class known as emergency, facilitating the sim-
ulation of emergency vehicles and their unique priv-
ileges. Vehicles classified as emergency vehicles are
automatically assigned default shapes and sizes suit-
able for rescue operations. They possess special pre-
vileges, such as the ability to overtake on the right side
in all traffic scenarios. Additionally, these vehicles are
permitted to traverse lanes specifically designated for
”emergency” use, which may restrict normal passen-
ger traffic. This functionality within SUMO enables
an accurate modeling of emergency vehicle behaviors
and traffic dynamics. We showcase that RLLS can re-
duce the EV travel time significantly as compared to
this default (SUMO emergency) baseline.
Our second contribution is the introduction of ex-
perimental settings which can help with evaluating the
worst case performance of algorithms. To evaluate
the worst case performance of algorithms, we intro-
duce slowing down vehicles at regular time intervals
into the traffic. These slowing down vehicles block
the traffic and introduce more congestion in the traffic
network. This simulation setting helps with evalua-
tion of the robustness of algorithms. Using a wide
range of experiments, we showcase that our RLLS
model trained using normal traffic scenarios can gen-
eralize well to these worst case settings and we do not
need to train separate models for the different traffic
scenarios.
In addition, we also evaluate the performance of
our approaches on real word dataset by using real
time speed data from New York City traffic (NYD,
2022) to calibrate traffic in a simulation. In this set-
ting as well, RLLS model outperforms the existing
approaches. In all the settings, for purposes of realis-
tic modeling, we also allow the EV to communicate
with other vehicles within a communication distance
c
d
. This is equivalent to communication done by an
EV using a siren in real world scenarios.
2 RELATED WORK
The first thread of research focuses on finding strate-
gies for the assignment of EV to incoming requests
(emergency calls) (Ghosh and Varakantham, 2018;
Haghani et al., 2003; Joe et al., 2022; Schmid, 2012).
(Schmid, 2012), formulates the problem of finding
the optimal dispatch strategy as an approximate dy-
namic programming problem and uses value function
approximation strategies to find the assignment of EV
to emergency calls at each timestep. (Ghosh and
Varakantham, 2018) formulate the problem as an in-
teger optimization problem and use Benders decom-
position to find a solution to the integer optimization
problem.
The second thread of research focuses on finding
the best route for EV to travel from base station to the
disaster location and from disaster location to hospi-
tal(s) (Giri et al., 2022; Su et al., 2022; Jotshi et al.,
2009). A sub-thread of this line of work, is the co-
ordination of traffic signal control to mitigate traffic
congestion and as a result to allow EV to reach the
destination quickly (Asaduzzaman and Vidyasankar,
2017; Chen et al., 2020; Chu et al., 2019; Van der Pol
and Oliehoek, 2016).
The last thread of research which is most rele-
vant to this paper is related to improving the lane
level dynamics of Emergency vehicles (Agarwal and
Paruchuri, 2016; Ismath et al., 2019; Cao and Zhao,
2022). In this thread of work, focus is on under-
standing and computing the value of each lane so to
pick the best feasible lane to optimize on the travel
time. (Zhang et al., 2022) focuses on safe lane-
changing trajectories for autonomous driving in ur-
ban environments to enhance the efficiency as well
as safety. (Maleki et al., 2023) studies a real-time
optimal cooperative lane change strategy leverag-
ing V2V communication, prioritizing safety and effi-
ciency through constrained optimization. While these
approaches primarily address normal traffic scenar-
ios using heuristic methods, our strategy formulates
the challenge of minimizing EV traversal time as an
MDP and employs RL techniques. Additionally, we
introduce scenarios with random slowing vehicles to
add complexity and enhance the realism of the simu-
lation. There are different assumptions and aspects of
the problem e.g., nature of communication, range of
communication, communication protocol to use, priv-
ileges of EV etc. that can affect the lane level decision
making process. Please note that while traffic simu-
lators will need to handle vehicle routing which in-
volves changing of lanes, decisions to switch lanes are
myopic in nature in general even though route plan-
ning tends to get optimized in a global sense.
3 BACKGROUND
The handling of lane level dynamics in EV traversal
consists of picking the best lane for EV to travel while
traversing a multi lane stretch of road. Similar to ex-
isting work, we assume the presence of a V2V single
hop communication model where EV can obtain the
position and speed of a vehicle in any lane up to a
fixed communication distance, c
d
via V2V commu-
nication. It can also send lane change requests to
Improving Lane Level Dynamics for EV Traversal: A Reinforcement Learning Approach
135

Figure 1: Comparison of EV Traversal Time for ERB,
SUMO, FLS and BLS Strategies.
the vehicles ahead of EV in its current lane within
this communication distance, c
d
, to clear the traffic.
Upon receiving the request from EV, vehicles attempt
to change the lane and if there is no vehicle present in
the destination lane, the lane change action would be
successful.
(Agarwal and Paruchuri, 2016) introduced the fol-
lowing two strategies to find the best lane for EV.
• FLS (Fixed Lane Strategy). In this strategy, EV
identifies the lane, that is fastest on an average,
based on prior information and picks that lane as
the fixed lane for its entire journey.
• BLS (Best Lane Strategy). In this strategy, at each
timestep, EV identifies the best lane using the util-
ity values for each lane and switches to the best
identified lane. BLS computes utility of lane i us-
ing the following equation:
u
i
= w
a
∗ A
i
+ w
b
∗ B
i
+ w
c
∗ µ
i
where A
i
denotes the normalized speed of the
slowest vehicle on lane i, B
i
denotes the normal-
ized average speeds of the vehicles on the lane i
and µ
i
denotes the normalized free space on the
lane i. The normalized free space is an approx-
imation and is computed using
n
i
−c
i
n
i
, where n
i
is the maximum number of vehicles that can be
present on lane i within communication distance
c
d
and c
i
is the number of vehicles present on the
lane i within communication distance c
d
.
In their experiments, the paper (Agarwal and
Paruchuri, 2016) compares the above two strategies
against the following baseline strategies:
• SUMO. SUMO (Simulation of Urban MObil-
ity) (Lopez et al., 2018) is a well known free and
open source traffic simulation package which has
been used for experimentation purposes in liter-
ature (and we also use in this paper). We use
SUMO strategy to refer to the default lane change
strategy implemented within the simulator.
• ERB (Empty Road Baseline). As the name sug-
gests, it is the time taken by the EV when there
are no vehicles on the road for the entire simula-
tion period. This is the minimum possible time
the EV can take and hence acts as a lower bound
for the EV traversal time.
Figure 1 shows the comparison between EV
traversal time of the above mentioned strategies
which act as a baseline for our work. As shown in the
figure, BLS outperforms FLS and SUMO, therefore,
in this work we focus on providing a better strategy
than BLS for lane level dynamics. There are two ma-
jor limitations of BLS which we try to overcome in
this work.
• BLS takes the decision of changing lane based on
the computed utility values of each lane. These
utility values are computed based on the current
timestep parameters and as a result can not cap-
ture the long term effect of the decision.
• BLS uses static weights for each parameter which
need to be pre-decided.
In this work, we propose reinforcement learning
based algorithm which can capture the long term ef-
fect of the decisions and does not require any weights
to be assigned to each parameter.
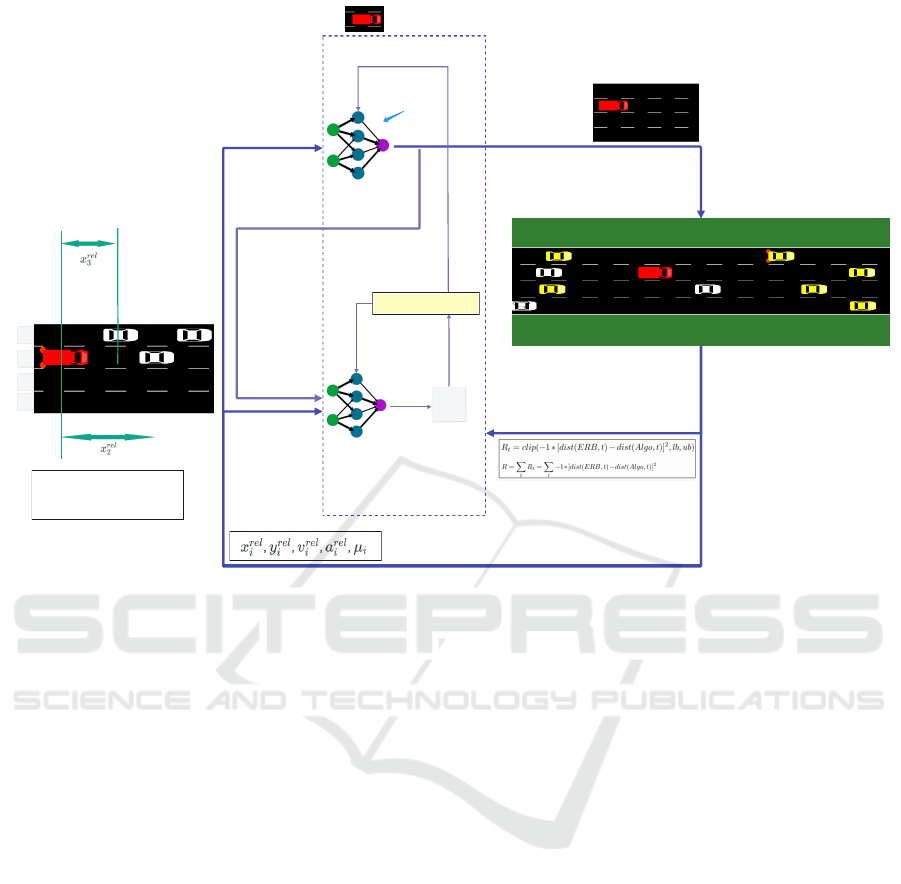
4 MODEL
As mentioned earlier, we encode the lane changing
problem for EV using an RL model. We now describe
each of the components of the underlying MDP tuple:
< S, A,P, R, N >
1. State Space (S). The state space comprises below
parameter values from each lane i:
• x
rel
i
. Relative distance along the x-axis, i.e., the
difference between the x-coordinate of the po-
sition of vehicle immediately ahead of the EV
on the lane i and the x-coordinate of EV.
• y
rel
i
. Relative distance along the y-axis, i.e., the
difference between the y-coordinate of the po-
sition of vehicle immediately ahead of the EV
on the lane i and the y-coordinate of EV.
• v
rel
i
. Relative speed, i.e., the difference between
the current speed of the vehicle immediately
preceding the EV on the lane i and the EV’s
current running speed.
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
136
AGENT
ENVIRONMENTActor
Critic
Action
Reward
Next State
State
State
Action
Adv=Q(s,a)- V(s)
V(S)
EV chooses the lane
at each step
Policy
0
1
2
3
Closest vehicle ahead of EV in
each lane is considered for
state space
Figure 2: RLLS Algorithm.
• a
rel
i
. Vehicle acceleration of the vehicle imme-
diately ahead of the EV on the lane i.
• µ
i
. Free space on the lane i within communica-
tion distance c
d
. It is calculated similar to the
BLS strategy as described in the Section 3.
As described above, the state space consists of
parameters extracted from vehicles immediately
preceding the EV, with one vehicle chosen from
each lane. The rationale for selecting a preceding
vehicle is to generalize the lane behavior by eval-
uating the parameters of vehicles ahead of the EV.
For N lanes, the state space will consist of 5*N
parameters.
2. Action Space (A). The action space encompasses
the available lane options within the simulation
environment,i.e. it is one of the N lanes.
3. Transition Probability (P). It is the probability
of transitioning from state s
i
to state s
j
on taking a
lane change action a. The transition model is not
known and hence we use reinforcement learning
to learn the policy for EV.
4. Reward (R). The intermediate reward at each
timestep is given by:
R
t
= −1 ∗ [dist(ERB, t) − dist(Algo, t)]
2
where dist(ERB,t) is the distance covered by
Empty Road Baseline within a Reward Interval t
and dist(Algo,t) is the distance covered by the al-
gorithm within the same Reward Interval t. The
total episodic reward is the sum of individual
rewards and can be represented using following
equation:
R =
∑
t
R
t
=
∑
t
−1∗[dist(ERB, t)−dist(Algo, t)]
2
To mitigate the effect of outliers on the reward
computation, hyperparameters such as the lower
bound (lb) and upper bound (ub) are employed
to clip the intermediate reward. The selection of
appropriate values for lb and ub is determined
through experimentation, reflecting the adjust-
ment of these parameters to optimize the reward
calculation process.
R
t
= clip(R
t
, lb, ub) (1)
5. Total Lanes (N). Represents the total number of
lanes. At any point, each vehicle will be present
in one of the N lanes.
Improving Lane Level Dynamics for EV Traversal: A Reinforcement Learning Approach
137

5 RLLS: REINFORCEMENT
LEARNING BASED LANE
SEARCH
Our RLLS approach uses A2C (Advantage Actor-
Critic) as an underlying algorithm to solve the model
described in Section 4. A2C is a synchronous, de-
terministic variant of Asynchronous Advantage Ac-
tor Critic (A3C) (Mnih et al., 2016). It combines
elements of both the actor-critic architecture and ad-
vantage estimation to improve training stability and
efficiency. This hybrid architecture combines value-
based and policy-based methods that help to stabilize
the training by reducing the variance. an Actor re-
sponsible for controlling the agent’s behavior (policy-
based method) and a Critic assessing the quality of
the actions taken (value-based method). In A2C, the
actor component is assigned the role of selecting ac-
tions based on the current policy, while the critic part
evaluates the value of state-action pairs and provides
feedback to the actor. The different components of
our RLLS approach are described in Figure 2.
As shown in the figure, the actor network maps
each state to a corresponding action. We can update
the Actor Network weights after every time step. The
actor network outputs a probability distribution cor-
responding to each action. We sample actions from
this probability distribution according to each action’s
probability. In our case, the action corresponds to the
lane on which EV should travel. If the action to take
lane1 has a value of .8 and the action to take lane2
has a value of .2, we will only choose the lane1 action
80% of the time and the lane2 action 20% of the time.
Because the output is a probability distribution, please
note that the agent action will not be deterministic but
stochastic.
A2C algorithm uses the Advantage function
which plays a crucial role in stabilizing the learning
process by estimating how better it is to take an ac-
tion at a state when compared to the average value of
that state. It gauges the additional reward obtained be-
yond the expected value of that state. If the Advantage
function A(s,a) is positive, indicating that our action
performs better than the average value of that state,
our gradient is encouraged in that direction. Con-
versely, if A(s, a) is negative, suggesting that our ac-
tion under performs compared to the state’s average
value, our gradient is prompted in the opposite direc-
tion. This mechanism helps guide the training process
towards actions that yield superior outcomes relative
to the state’s average value.
The critic network maps each state s to its corre-
sponding value v(s). Unlike the Actor Network which
outputs a probability distribution of actions, the Critic
Network outputs the value of the input state as a float-
ing point number. In the figure 2, the critic network
evaluates the input state to have a value v(s).
6 EXPERIMENTS
Goal of the experiments section is to compare the per-
formance of our RLLS approach against the leading
baseline strategies across different settings. The met-
ric we use to compare the strategies is the EV traver-
sal time, i.e., the total time taken by the EV to cover
the stretch of the road. RLLS is evaluated against the
following baseline strategies:
• ERB - Empty Road Baseline
• SUMO - Default strategy used within simulator.
• FLS - Fixed Lane Strategy
• BLS - Best Lane Strategy
We propose three variants of RLLS namely
RLLS-A,B and C. Each variant differs from the other
based on the type of reward function used in the sim-
ulation (episodic,intermediate or both) and the train-
ing scenario (trained using normal traffic or the worst
case traffic simulation using slowed down vehicles).
The difference between these variants is summarized
in Table 1.
Table 1: RLLS Settings.
Setting Training Scenario Reward Type
RLLS-A Normal Traffic Intermediate
RLLS-B Normal Traffic
Intermediate +
Episodic
RLLS-C
3 vehicles slowed
for every 10 seconds
Intermediate +
Episodic
6.1 Setup
In this section, we present our experimental set-up us-
ing the SUMO software to evaluate the different EV
strategies. The parameters used for simulation are
listed in Table 2. The experimental setup tries to repli-
cate the environment which is prevalent in major city
area. The road segments in such cities have multiple
lanes that are quite crowded and are in general 1 km
to 10 km in length, at a stretch, before hitting an inter-
section. In our experiments, unless stated otherwise,
we use a 2 km one way stretch of road with 4 lanes.
As discussed in Section 5, we employed the Ad-
vantage Actor-Critic (A2C) model for training. The
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
138
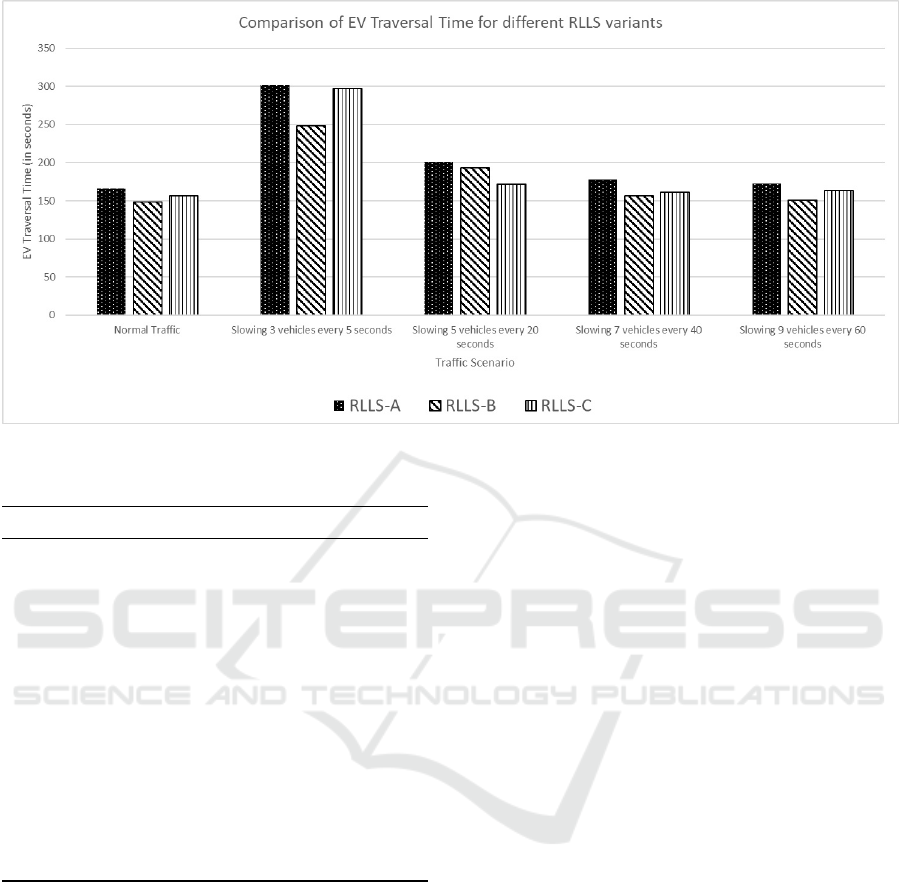
Figure 3: Comparison of EV traversal time for RLLS variants.
Table 2: Experimental Parameters.
Parameters Description Defaults
v
i
Vehicle maximum speed 33.33m/s
vi
p
Preferred maximum speed variable
a
i
Vehicle acceleration 0.8m/s
2
d
i
Vehicle deceleration 4.5m/s
2
c
j
Request delay 1 second
s
dev
Speed deviation 0, 0.2
σ Driver imperfection 0, 0.5
w
a
Lowest speed weight-age 0.4
w
b
Average speed weight-age 0.4
w
c
Free space weight-age 0.2
δ
Min utility difference
between lanes
0.20
t Reward Interval 5 seconds
α Re-computation Interval 10 seconds
c
d
Communication Distance 100 meters
intermediate reward is subjected to clipping as men-
tioned in Equation 1. The lower bound (lb)is used
as -100 and upper bound (ub) is used as 0 to ensure
stability during the reinforcement learning process.
The training comprises of 700,000 steps. The train-
ing setup is designed in such a way that the EV ex-
plores through various traffic distributions. The same
simulation environment is used across strategies for
uniformity. At every simulation step, RLLS decides
whether EV should change to any other lane or con-
tinue in the same lane. All the algorithms take lane
change decision for EV at every re-computation inter-
val. EV also communicates to other vehicles within
communication distance to change the lane at every
re-computation interval. The re-computation interval
is fixed to 10 seconds in our experiments (refer Table
2).
6.1.1 Simulation Model Setup for Real World
Dataset
We model the traffic patterns corresponding to cities
with relatively faster moving traffic using the data
available from the City of New York Department of
Transportation(NYCDOT) (NYD, 2022). The NYC-
DOT data feed contains real-time traffic information
from sensor feeds, mostly from major arterials and
highways of New York City (NYC). This data feed is
updated every minute for each road over a total of 137
roads. We developed our simulation model using the
following steps:
1. We collected data for about a week (9670 min-
utes) from the real-time data feed.
2. For any road simulated, a segment of 2 kms is
used, irrespective of the actual length of the road
segment.
3. For (a few) roads with varying number of lanes
(merges or splits), we use the maximum number
of lanes for the entire length we simulate.
4. We included 131 roads having 4 lanes each (roads
having other number of lanes were excluded).
5. The road speed data we have is converted into in-
dividual lane speed using the procedure described
below that would capture the salient features of
NYC traffic.
6. Modeling Groups. Firstly, we classify roads into
groups based on number of lanes in the road.
Improving Lane Level Dynamics for EV Traversal: A Reinforcement Learning Approach
139
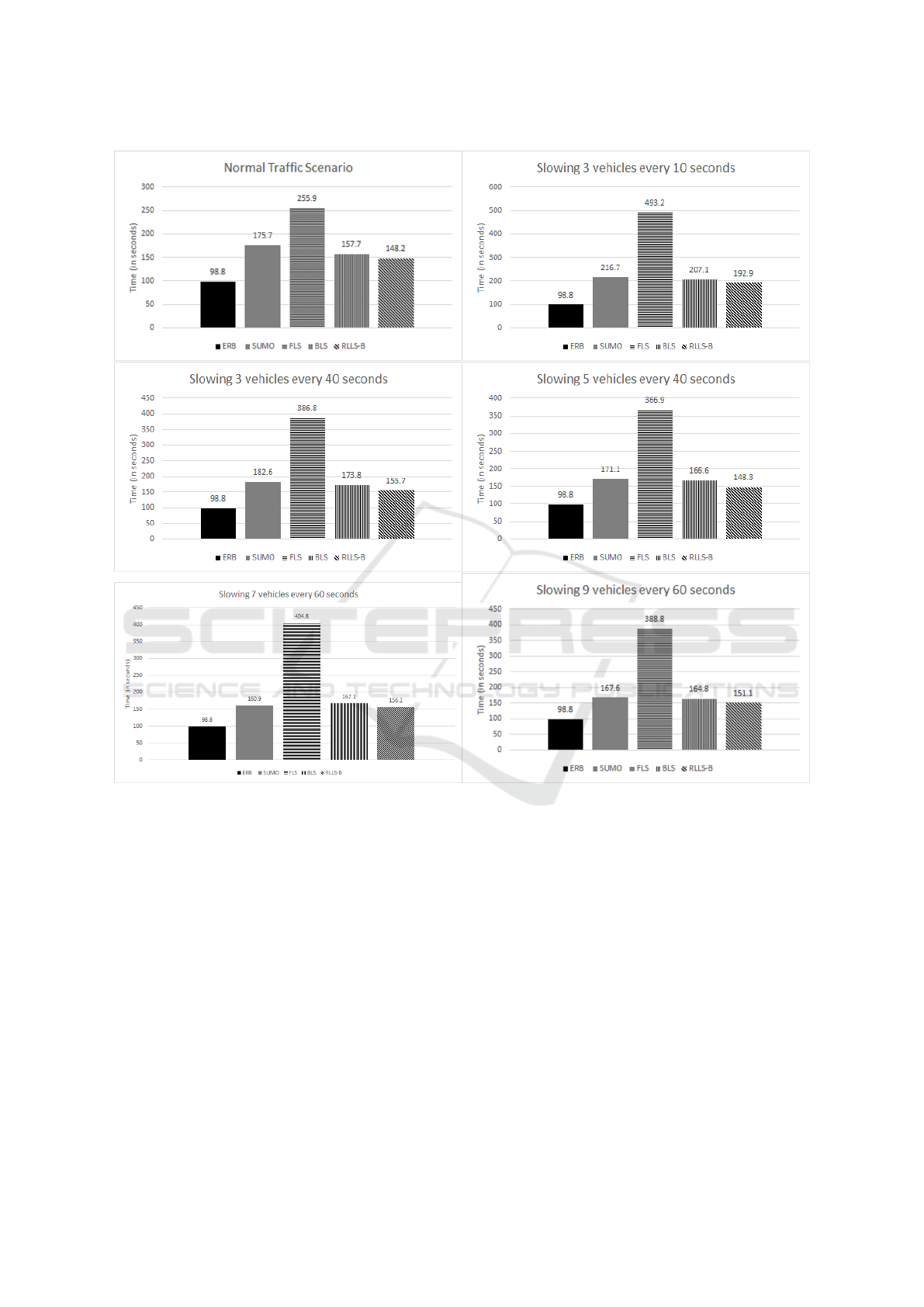
Figure 4: Comparison of EV traversal time of RLLS with baseline strategies in different traffic scenarios.
Hence all roads with 2 lanes are classified into one
group g2, roads with 3 lanes into group g3 and so
on. In this work, we consider only roads with 4
lanes so we have a single group g4.
7. Modeling Buckets. For the group g4, the average
road speeds are classified into buckets using inter-
vals of 5 m/s (18 km/h) each. Therefore we have
buckets b
1 j
for 0-5 m/s, b
2 j
for 5-10 m/s till b
14 j
for 65-70 m/s.The average speed for each bucket,
b
avg j
, is taken as the mean of the bucket. For ex-
ample, for the bucket 0-5 m/s, the average bucket
speed, b
avg j
is considered 2.5 m/s. In a similar
way the average road speed for 5-10 m/s bucket is
considered 7.5 m/s.
8. Obtaining Weights for Buckets. We then obtain
the weights for each bucket in the following fash-
ion: We have information for 131 roads having
9670 minutes of data collected per minute. There-
fore, for each road, we have 9670 data points cor-
responding to average speed of the road at that
minute. Each of these 9670 points are then classi-
fied into buckets depending on the speed the data
point represents. The weight of a bucket is incre-
mented by 1 for each data point that falls under
this bucket. For example, if the average speed of
a road (with j lanes) is 0-5 m/s for 500 minutes
(out of the 9670 minutes) then we increment the
weight w
1 j
by 500. This procedure is repeated for
all the roads to obtain the total weight for each
bucket.
9. The SUMO Simulation. Each b
i j
has an aver-
age bucket speed b
avg j
and a weight w
i j
. b
avg j
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
140

is taken as the average road speed in simulation.
To simulate lanes, b
avg j
is converted into lane
speeds: Each lane is set a maximum speed, picked
using a uniform distribution between b
i j
± 40%.
Hence, the mean of maximum speed across lanes
is the average road speed on expectation. We then
let the EV traverse on a 2 km stretch of road in
the SUMO simulation and calculate it’s run time.
Each setting is run for 100 times, hence the same
lane will have different maximum speeds across
the 100 runs and we obtain 100 different EV run
times.
10. EV Run Time per Bucket. We average the 100
different EV run times obtained to compute the
EV run time EV
ri j
for a bucket i and group j. It
represents the time an EV would take (on average)
if the number of lanes is j and the average road
speed corresponds to b
avg j
. This is repeated for
all buckets in every group.
11. Computing Mean Run Time. For each group
j, we compute gr
j
= EV
r1 j
∗ w
1 j
+ EV
r2 j
∗ w
2 j
+
... + EV
r14 j
∗w
14 j
.
gr
j
(w
1 j
+...+w
14 j
)
represents the av-
erage time an EV needs to travel a 2 km road
with j lanes. As we consider only a single group
with 4 lanes, the mean run time is obtained as
gr
4
(w
14
+...+w
144
)
. This mean run time represents the
average time an EV needs to cover a 2 km stretch
of road with speeds corresponding to NYC roads
and is used as run time for different strategies.
6.1.2 Traffic Scenarios
In our experiments we consider different traffic sce-
narios to evaluate the performance of our approach.
• Normal Traffic: This is the regular traffic scenar-
ios where vehicles are travelling on the road. In
the simulation, at each second one vehicle enters
the road with a probability of 60%.
• Slowing down m vehicles every t seconds: These
are the specialized traffic scenarios which we in-
troduce to simulate traffic congestion on the road.
In this scenario, every t seconds, we randomly
slow down m vehicles on the road. This can be
considered as worst case scenarios as it is difficult
to move in a congested road where vehicles are
moving at a very slow pace. Therefore, if an al-
gorithm performs well in such scenarios it can be
considered robust to random traffic congestion’s
which can occur in real-world.
6.2 Results
Our first experiment is to compare the results of dif-
ferent variants of our approach i.e., RLLS in different
traffic scenarios to identify the best performing vari-
ant. Figure 3 shows the comparison of EV traversal
times in different traffic conditions. As shown in the
figure, RLLS-B outperforms the other variants and
has lowest EV traversal time across different settings.
We can make following observations from these re-
sults:
• Providing both intermediate and episodic reward
helps in learning a better model than providing
only the intermediate reward.
• We can train a single model for normal traffic sce-
narios and it generalizes well to different traffic
conditions.
Next, we provide the comparison of RLLS-B
model against baseline approaches on the synthetic
dataset. Figure 4 show the comparison of the time
taken by EV using RLLS-B and other approaches. As
shown in the figure, RLLS-B consistently performs
better than existing approaches for different scenar-
ios. Here are the key observations:
• BLS outperforms SUMO in minimizing the EV
traversal time through its utility function com-
putation in normal traffic conditions. However,
when the environment is made more complex,
like slowing vehicles; the performance of BLS
gets limited with only a little improvement over
SUMO. This could be due to its deterministic na-
ture. In contrast, by utilizing the adaptability of
the RL algorithm, the RLLS-B algorithm can dy-
namically respond to these varying traffic scenar-
ios using the state space information.
• In normal traffic scenarios, RLLS-B obtains 6%
improvement over BLS but in specialized scenar-
ios of slowing down vehicles this improvement
goes up to 10.9% (Slowing down 5 vehicles ev-
ery 40 seconds)
Finally, in Figure 5, we present the comparison of
RLLS-B approach with the baseline strategies on the
real-world dataset. The data is processed and the run-
time of EV is computed as mentioned in the Sec-
tion 6.1.1. In this case as well, RLLS-B outperforms
BLS and other baseline strategies. In the normal traf-
fic scenario, RLLS-B obtains 2.5% improvement over
BLS which increases to 4% when we slow down ve-
hicles.
It is important to note that even a very small im-
provement in the travel time of EV can help in saving
human lives, so improvement of 4% is of significant
importance.
Improving Lane Level Dynamics for EV Traversal: A Reinforcement Learning Approach
141
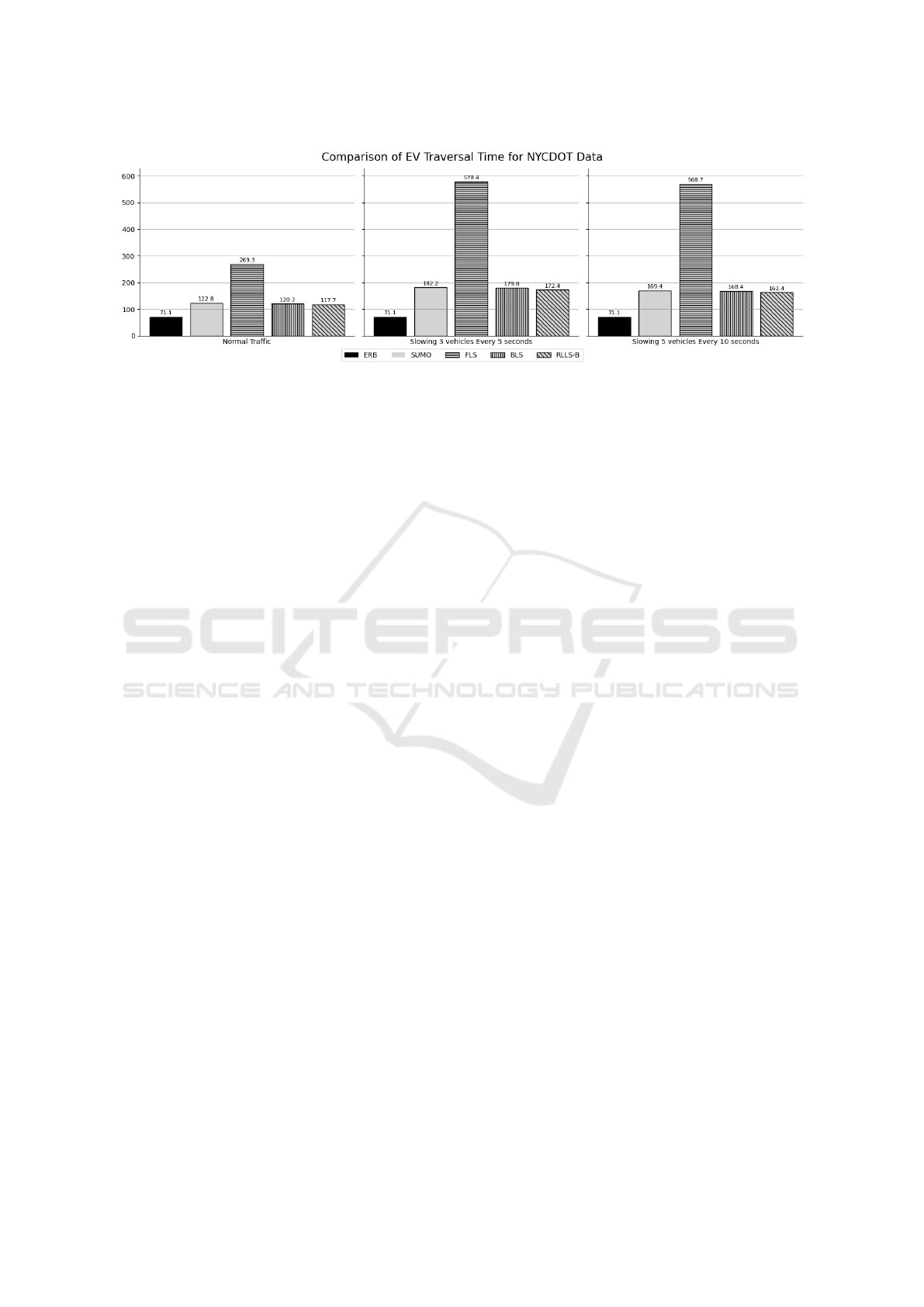
Figure 5: Comparison of EV Traversal Time for ERB, SUMO, FLS, BLS, RLLS-B strategies for Real-World dataset.
We would also like to highlight that the perfor-
mance of RLLS-B can be improved by choosing a
better state space. Initially we experimented with a
bigger state space including the details of 20 clos-
est vehicles around EV but this state space resulted
in sub-optimal results and also increased the training
time. The algorithm performance has been enhanced
by adjusting this state space to include the positional
difference and speed, acceleration differences of the
immediate vehicle only in each of the four lanes; as
well as the free space. This reduction in the dimension
resulted in not only reducing the noise from the initial
state space, but also focusing on more relevant factors,
leading to improved performance of the RLLS-B lane
changing strategy.
7 CONCLUSION
In this paper we presented a reinforcement learning
strategy to improve lane level dynamics for emer-
gency vehicles. Through detailed experiments us-
ing SUMO simulator, we showed that our approach
outperforms the baseline strategies in different traffic
scenarios. We considered a straight stretch of road in
this work. In future, we would like to extend this work
to combine the route planning and lane level dynam-
ics which can further help in reducing the overall EV
travel time.
REFERENCES
Agarwal, A. and Paruchuri, P. (2016). V2v communication
for analysis of lane level dynamics for better ev traver-
sal. In 2016 ieee intelligent vehicles symposium (iv),
pages 368–375. IEEE.
Asaduzzaman, M. and Vidyasankar, K. (2017). A priority
algorithm to control the traffic signal for emergency
vehicles. In 2017 ieee 86th vehicular technology con-
ference (vtc-fall), pages 1–7. IEEE.
Cao, W. and Zhao, H. (2022). Lane change algorithm us-
ing rule-based control method based on look-ahead
concept for the scenario when emergency vehicle ap-
proaching. Artificial Life and Robotics, 27(4):818–
827.
Chen, C., Wei, H., Xu, N., Zheng, G., Yang, M., Xiong,
Y., Xu, K., and Li, Z. (2020). Toward a thousand
lights: Decentralized deep reinforcement learning for
large-scale traffic signal control. In Proceedings of
the AAAI Conference on Artificial Intelligence, vol-
ume 34, pages 3414–3421.
Chu, T., Wang, J., Codec
`
a, L., and Li, Z. (2019). Multi-
agent deep reinforcement learning for large-scale traf-
fic signal control. IEEE Transactions on Intelligent
Transportation Systems, 21(3):1086–1095.
Ghosh, S. and Varakantham, P. (2018). Dispatch guided
allocation optimization for effective emergency re-
sponse. In Proceedings of the AAAI Conference on
Artificial Intelligence, volume 32.
Giri, A. R., Chen, T., Rajendran, V. P., and Khamis, A.
(2022). A metaheuristic approach to emergency ve-
hicle dispatch and routing. In 2022 IEEE Interna-
tional Conference on Smart Mobility (SM), pages 27–
31. IEEE.
Haghani, A., Hu, H., and Tian, Q. (2003). An optimiza-
tion model for real-time emergency vehicle dispatch-
ing and routing. In 82nd annual meeting of the Trans-
portation Research Board, Washington, DC. Citeseer.
Ismath, I., Samarasinghe, T., Dias, D., Wimalarathna, M.,
Rasanga, W., Jayaweera, N., and Nugera, Y. (2019).
Emergency vehicle traversal using dsrc/wave based
vehicular communication. In 2019 IEEE Intelligent
Vehicles Symposium (IV), pages 1981–1986. IEEE.
Joe, W., Lau, H. C., and Pan, J. (2022). Reinforcement
learning approach to solve dynamic bi-objective po-
lice patrol dispatching and rescheduling problem. In
Proceedings of the International Conference on Au-
tomated Planning and Scheduling, volume 32, pages
453–461.
Jotshi, A., Gong, Q., and Batta, R. (2009). Dispatching and
routing of emergency vehicles in disaster mitigation
VEHITS 2024 - 10th International Conference on Vehicle Technology and Intelligent Transport Systems
142

using data fusion. Socio-Economic Planning Sciences,
43(1):1–24.
Lopez, P. A., Behrisch, M., Bieker-Walz, L., Erdmann, J.,
Fl
¨
otter
¨
od, Y.-P., Hilbrich, R., L
¨
ucken, L., Rummel,
J., Wagner, P., and Wießner, E. (2018). Microscopic
traffic simulation using sumo. In 2018 21st inter-
national conference on intelligent transportation sys-
tems (ITSC), pages 2575–2582. IEEE.
Maleki, M., Taghavipour, A., and Azadi, S. (2023). A real-
time optimal cooperative lane change strategy via v2v
communication. Proceedings of the Institution of Me-
chanical Engineers, Part D: Journal of Automobile
Engineering, 237(13):3094–3107.
Mnih, V., Badia, A. P., Mirza, M., Graves, A., Lillicrap, T.,
Harley, T., Silver, D., and Kavukcuoglu, K. (2016).
Asynchronous methods for deep reinforcement learn-
ing. In International conference on machine learning,
pages 1928–1937. PMLR.
NYD (2022). New york department of transporta-
tion - real-time traffic speed data. https://data.
cityofnewyork.us/transportation/real-time-traffic-
speed-data/xsat-x5sa.
Puterman, M. L. (2014). Markov decision processes: dis-
crete stochastic dynamic programming. John Wiley &
Sons.
Schmid, V. (2012). Solving the dynamic ambulance reloca-
tion and dispatching problem using approximate dy-
namic programming. European journal of operational
research, 219(3):611–621.
Su, H., Zhong, Y. D., Dey, B., and Chakraborty, A. (2022).
Emvlight: A decentralized reinforcement learning
framework for efficient passage of emergency vehi-
cles. In Proceedings of the AAAI Conference on Arti-
ficial Intelligence, volume 36, pages 4593–4601.
Van der Pol, E. and Oliehoek, F. A. (2016). Coordi-
nated deep reinforcement learners for traffic light con-
trol. Proceedings of learning, inference and control of
multi-agent systems (at NIPS 2016), 8:21–38.
Zhang, S., Deng, G., Yang, E., and Ou, J. (2022).
Optimal vehicle lane change trajectory planning in
multi-vehicle traffic environments. Applied Sciences,
12(19):9662.
Improving Lane Level Dynamics for EV Traversal: A Reinforcement Learning Approach
143
