
Revolutionizing Vehicle Damage Inspection: A Deep Learning
Approach for Automated Detection and Classification
Onikepo D. Amodu
1
, Adel Shaban
1a
and Gbenga Akinade
2b
1
University Centre Middlesbrough, Middlesbrough College, U.K.
2
Department of Computing & Games, Teesside University, U.K.
Keywords: Vehicle Damage Detection, Deep Learning Algorithms, Machine Learning.
Abstract: In the past, fleet managers and vehicle insurance companies relied on manual methods to inspect vehicle
damage. This involved visually examining the vehicles and taking measurements manually. The aim of this
study was to explore the use of deep learning algorithms to automate the process of vehicle damage detection
and classification. By automating these tasks, stakeholders in the industry, such as fleet managers and
insurance companies, can streamline vehicle inspections, assess the extent and severity of damage, and
validate insurance claims. The research focused on three main deep learning architectures: Convolutional
Neural Networks (CNNs), Generative Adversarial Networks (GANs), and Deep Neural Networks (DNNs).
These algorithms were applied to a diverse dataset containing vehicles in different lighting conditions. The
study conducted a comprehensive evaluation of each algorithm's performance, considering factors such as
accuracy, speed, and detection rates. The goal was to assess the strengths and weaknesses of each approach.
The results of the experiment revealed significant differences in the performance of the CNN, DNN, and GAN
models. The CNN model achieved the highest accuracy rate, at 91%, followed by the DNN model at 84%.
The GAN model achieved a more modest accuracy rate of 78%. These findings contribute to the advancement
of vehicle damage detection technology and have important implications for industries, policymakers, and
researchers interested in deploying state-of-the-art solutions for faster and more precise identification of
various levels of damage and their severity.
1 INTRODUCTION
The swiftly emerging technology of identifying and
categorizing vehicular damage has garnered immense
traction due to its ability to address two primary
objectives. Firstly, it considerably reduces the
expenses related to the traditional manual inspection
of vehicles. Secondly, it provides an unfailingly
dependable methodology for detecting and classifying
damage from several factors, such as wear and tear
and collisions (Kim et al., 2013). This state-of-the-art
technology has brought about a significant
transformation in the automotive industry and
associated fields, consequently contributing to
elevated levels of safety, improved quality assurance,
and product advancement.
Damage detection was often done by hand
measurements and visual inspections prior to the
a
https://orcid.org/0000-0001-6765-3645
b
https://orcid.org/0000-0003-3950-3775
development of automated technologies. Although
this method is beneficial, it had flaws and was prone
to errors and instability. As a result, scientists have
worked to develop a more efficient method of damage
detection, as mentioned in the research by Lyu, Feng,
and Wang (2020). The study comes to the conclusion
that it is possible to precisely measure physical
deformations in an object in addition to being able to
identify them by using advanced data collection
techniques like stereo vision. Zhao et al.'s (2018)
research has provided further evidence of the
advantages of automated inspection techniques. The
study investigated the long-term benefits of automated
damage detection systems, suggesting that the risk of
human error can be eliminated entirely, resulting in
more precise estimates of vehicle damage reports.
This improvement in accuracy has been mentioned in
numerous workshop reports and was also illustrated in
the field experiment conducted by Jeon et al. (2020).
Amodu, O., Shaban, A. and Akinade, G.
Revolutionizing Vehicle Damage Inspection: A Deep Learning Approach for Automated Detection and Classification.
DOI: 10.5220/0012630700003705
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 9th International Conference on Internet of Things, Big Data and Security (IoTBDS 2024), pages 199-208
ISBN: 978-989-758-699-6; ISSN: 2184-4976
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
199

The research concluded that utilizing automated
vehicle damage recognition systems can save dozens
of man-hours, significantly reducing the time required
to diagnose vehicle problems.
Innovatively, deep learning technology has
substantially grown in recent years. Its potential as a
facilitative mechanism for various industries is
discernible through its application to identifying and
categorizing vehicular damage. This sophisticated
technology harnesses artificial neural networks'
power to detect and accurately classify damage to
vehicles (Cireşan et al., 2012). Neural networks can
assimilate information from a vast range of data
inputs, rendering a comprehensive approach to
vehicle damage classification considerably more
dependable than traditional manual inspection
methods (Nguyen et al., 2016).
Employing deep learning algorithms for vehicle
damage detection and classification is primarily
geared towards curtailing the time and expenditure
involved in evaluating, diagnosing, and rectifying
vehicular damages (Sarkar et al., 2014). Trained
networks can be proficiently utilized to expediently
and precisely recognize diverse forms of damage and
categorize them into particular classifications, such as
dents, scratches, or chip marks. This, in turn,
substantially decreases the costs and time involved in
the repair process and mitigates the likelihood of
errors. Furthermore, these algorithms can be
employed to speedily gauge the severity of the
damage and suggest potential repair methodologies,
thereby effectively streamlining the repair process
(Kim et al., 2013).
Innovatively, deep learning algorithms can detect
anomalies or discrepancies in vehicle images
(Cireşan et al., 2012).
This necessitates a substantial and heterogeneous
accumulation of datasets, including images of
vehicles exhibiting various damages. Furthermore,
the datasets must be classified with labels that specify
the types of damage visible in each image. This
greatly aids the algorithms in effectively detecting
and categorizing the diverse types of damage.
Vehicle detection using deep learning methods
such as CNNs and DNNs has achieved significant
progress and has shown promising results in recent
years. However, limitations and gaps still need to be
addressed to improve the accuracy and efficiency of
the detection process.
Deep learning-based vehicle detection heavily
relies on the quality and quantity of labeled data.
Labeling large amounts of data can be time-
consuming and expensive, limiting the ability to train
the models on a diverse data set. Additionally, the
performance of deep learning models can be affected
by the quality and accuracy of the labels, which can
be subjective and prone to errors.
Another limitation is that deep learning models
for vehicle detection may struggle to generalize to
new environments or conditions do not present in the
training data. If the model is trained on images
captured during the day, it may not perform well on
images captured at night or in bad weather conditions.
This is known as the "generalization gap" and can
limit the model's usefulness in real-world scenarios.
This study aims to address the undervaluation of
deep learning models by implementing a specialized
technical experiment for vehicle damage detection
and classification. The experiment considers factors
such as the type of vehicle, dataset size, and required
accuracy to determine the most effective technique
for identifying and categorizing vehicle damage. The
proposed solution aims to enhance customer service
and streamline the repair process by providing
necessary support resources. The paper also examines
the current state and future prospects of technology in
detecting and classifying vehicle damage, and
presents a comprehensive report with an in-depth
analysis of existing models and experimental
evaluations.
2 LITERATURE REVIEW
In recent years, vehicle damage detection and
classification has emerged as a rapidly expanding
area of interest in the automotive industry. With an
extensive body of literature spanning the past twenty
years, there has been a growing awareness of the
criticality of this field and the prospect of creating a
self-sustaining system of vehicle diagnostic
technology. This literature review seeks to
consolidate all available research on this topic and
identify the central outcomes and patterns that can be
employed in practical settings. This review article
examines advancements in this area, highlighting the
significant developments and techniques used to
create vehicle damage detection and classification
systems.
Studies showcased in this review are
predominantly sourced from academic publications
such as scholarly journals and conference
proceedings, concentrating on advanced diagnostics,
expert systems, computer vision, and artificial
intelligence. Moreover, the review also considers
commercial materials produced by experts within the
automotive sector and third-party manufacturers of
vehicle diagnostic tools.
IoTBDS 2024 - 9th International Conference on Internet of Things, Big Data and Security
200

In this literature review, recent progress in the field
of vehicle damage detection and classification has
been presented. Different imaging technologies like
3D scanning, infrared imaging, and stereo vision have
been employed to accurately assess the extent of
damage resulting from an accident. Furthermore,
several studies have revealed the potential of machine
learning approaches, including convolutional neural
networks and deep learning-based object detectors, for
precisely identifying and categorizing vehicle
damage.
The primary objective of this literature review is
to pinpoint two essential elements, firstly, examine
the efficacy of current automated systems for
detecting damage and analyzing the outcomes of their
precision. Secondly, it will reveal the current
tendencies within vehicle damage classification by
scrutinizing established damage classifications'
dependability, credibility, and consistency.
2.1 Vehicle Damage Detection
Before the advent of automated systems, damage
detection was frequently conducted through visual
inspections and manual measurements. Despite
being helpful, this technique has shortcomings and is
susceptible to inaccuracies and unreliability.
Consequently, researchers have endeavored to create
a more practical approach to damage detection. For
example, Liu et al. (2020) highlight that by utilizing
sophisticated data-gathering methods like stereo
vision, it is feasible to detect and precisely measure
physical deformations in an object. Hong-Jie Zhang
et al. (2022) also examined the potential implications
of model-based object detection within the
diagnostic domain. The study postulates that a three-
dimensional vehicle model can be established
through the fusion of shape-based segmentation and
stereo-vision, leading to a more precise and detailed
depiction of the inflicted damages. Zhao et al. (2018)
provided further evidence of the advantages of
automated inspection techniques. The study
investigated the long-term benefits of automated
damage detection systems, suggesting that the risk of
human error can be eliminated, resulting in more
precise estimates of vehicle damage reports. This
improvement in accuracy has been reported in
several studies (Jeon et al., 2020).
Zhao et al. (2018) concluded that automated
vehicle damage recognition systems could save
dozens of person-hours, significantly reducing the
time required to diagnose vehicle problems.
Image processing techniques, which include 3D
scanning, infrared imaging, active imaging, and
stereo vision, have gained significant popularity in
detecting and categorizing vehicle damage. 3D
scanning creates high-quality images of the damaged
car's surface, which can be utilized to determine the
damage's extent and classify the damage type.
Zhang et al. (2022) conducted a study in which an
infrared camera was utilized to capture images of a
damaged vehicle. These images were then processed
to measure and categorize the damage precisely. The
research demonstrated that the infrared imaging
system could identify various types of damage,
including dents and scratches, more accurately than a
conventional visual inspection system.
2.2 Algorithms for Vehicle Damage
Classification
The process of damage classification involves sorting
damages into various types. This is typically achieved
by utilizing image recognition software, which is
capable of distinguishing various types of
abnormalities within an object. Recent research has
extensively utilized machine learning techniques to
enhance the accuracy of vehicle damage detection
and classification systems. For example, In a study by
Jiang et al. (2021), a deep learning-based object
detection model was used to detect and classify
vehicle damage utilizing a dataset of damaged car
images. The model accurately detected and classified
vehicle damage with a high degree of accuracy.
According to White et al. (2006), initial efforts at
damage classification were rudimentary, utilizing a
small number of rule-based algorithms to categorize
surface damage through a method known as
"hierarchical damage categorization." This was
subsequently improved upon by Jiang et al. (2007),
who introduced the concept of "context-aware
damage detection" to move closer to automated
damage detection by implementing a knowledge-
based framework.
3 METHODOLOGY
3.1 Dataset Description
A secondary dataset containing 1631 images of
vehicles taken in various settings and lighting
conditions was collected from Kaggle
(https://www.kaggle.com/datasets/prajwalbhamere/c
ar-damage-severity-dataset). This dataset contain
images of vehicles captured in various settings and
lighting conditions.
Revolutionizing Vehicle Damage Inspection: A Deep Learning Approach for Automated Detection and Classification
201
3.2 Data Preparation
The first step in training a CNN is to prepare the data.
This includes acquiring a large dataset of labeled
images for training, validation, and testing. The data
would be cleaned, normalized, and augmented to
ensure diversity in the images trained by the model
(Amrutha, 2020).
This dataset provides a diverse range of examples
for training and testing vehicle damage detection
models. Each image is annotated with bounding
boxes around areas of damage, including dents,
scratches, and other types of wear and tear.
The dataset includes vehicles of different makes
and models, ranging from sedans and SUVs to trucks
and motorcycles. This variety ensures that models
trained on this dataset can detect damage on various
vehicles.
The dataset was classified into 3 categories as
shown in table 1:
Table 1: Description of data set for damage classification.
Category Image Number
Minor
534
Moderate
583
Severe 595
In addition to the image annotations, the dataset
also includes information on the type and severity of
the damage.
With this dataset, the possibilities for machine
learning and computer vision applications are
endless. This dataset is a valuable resource for any
project that improves vehicle safety and efficiency,
from advanced driver assistance systems to insurance
claim processing.
3.2.1 Data Pre-Processing
Once the dataset was collected, it was pre-processed
to remove any unwanted data or artifacts that may
interfere with the analysis, Image pre-processing is a
critical aspect of preparing data for computer vision
tasks. It involves manipulating images to eliminate
distortions, improve quality and standardize their
characteristics. This study employed fundamental
techniques used in image pre-processing such as
image cropping, resizing, and normalization.
By standardizing the image size, resizing can help
to reduce the computational burden on the model
during training as shown in fig 1:
Figure 1: Image Resizing.
Normalization was done to adjust the pixel values of
the images to ensure that they have similar ranges and
distributions. This technique enhances the image's
contrast and makes it simpler for the model to identify
and learn relevant features.
3.2.2 Data Annotation
The next step of annotation, which is a crucial step in
preparing a dataset for machine learning applications,
was performed. vehicle images were manually
labeled with the corresponding metadata or labels to
create a labeled dataset that can be used to train
machine learning models. This helps the model
understand the relevant features and patterns in the
data. This process involved labeling images with the
corresponding damage type and severity in the
IoTBDS 2024 - 9th International Conference on Internet of Things, Big Data and Security
202
context of an image-based predictive maintenance
application.
Annotated datasets are a critical component of
deep learning models. They are used to train the
model to recognize and classify objects in images or
videos. The annotations provide the model with the
information it needs to identify specific features or
patterns that correspond to different classes or labels.
In the instance of this study, the annotations would
help the model recognize diverse types of damage and
their severity levels.
Automated annotation can be much faster and
more efficient than manual annotation, but it may not
always provide the same level of accuracy and detail.
Figure 1 shows the manual annotation process
performed on a vehicle image in other to attain
highest quality form the datasets.
In the context of image-based predictive
maintenance, the annotation process would typically
involve identifying and labeling the different types
of damage that are relevant to the application. The
annotations would also include information about the
severity of the damage, such as a minor scratch or a
significant structural defect. Hence, this data image
will be labelled into three classes: Minor damage,
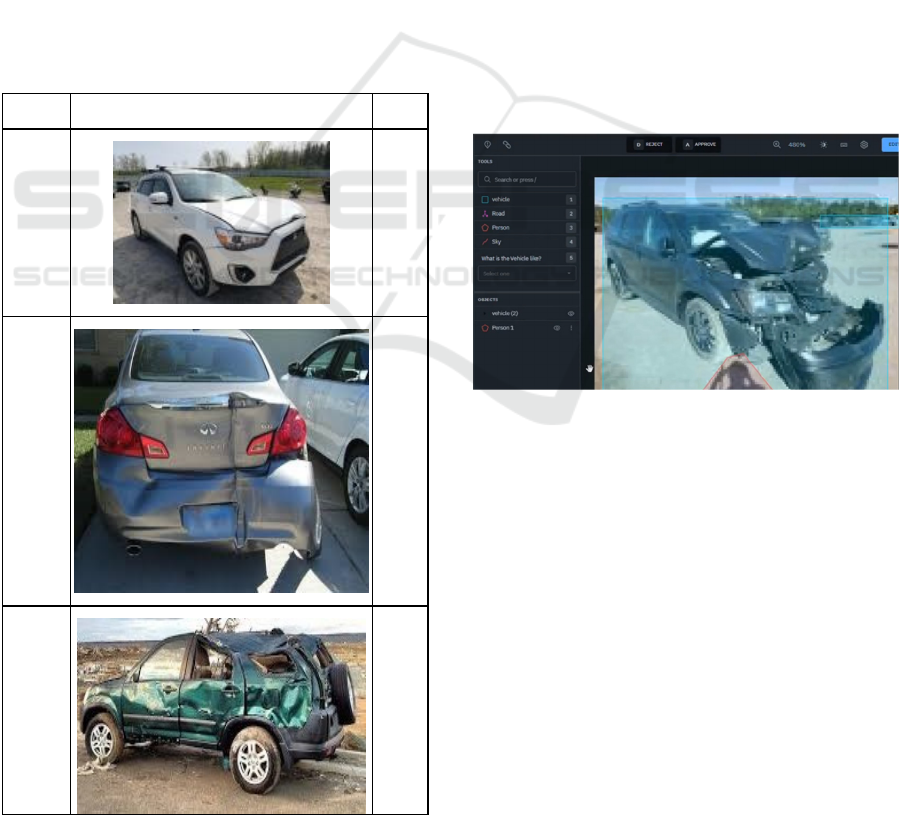
Medium Damage, and Severe Damage as shown in
figure 2.
Figure 2: Data classification.
The annotation process was broken down into several
steps. Step 1 was to determine the types of damage
that need to be labeled. This involves identifying the
specific use case and the types of damage that are
relevant to that use case. Step 2 was to create a
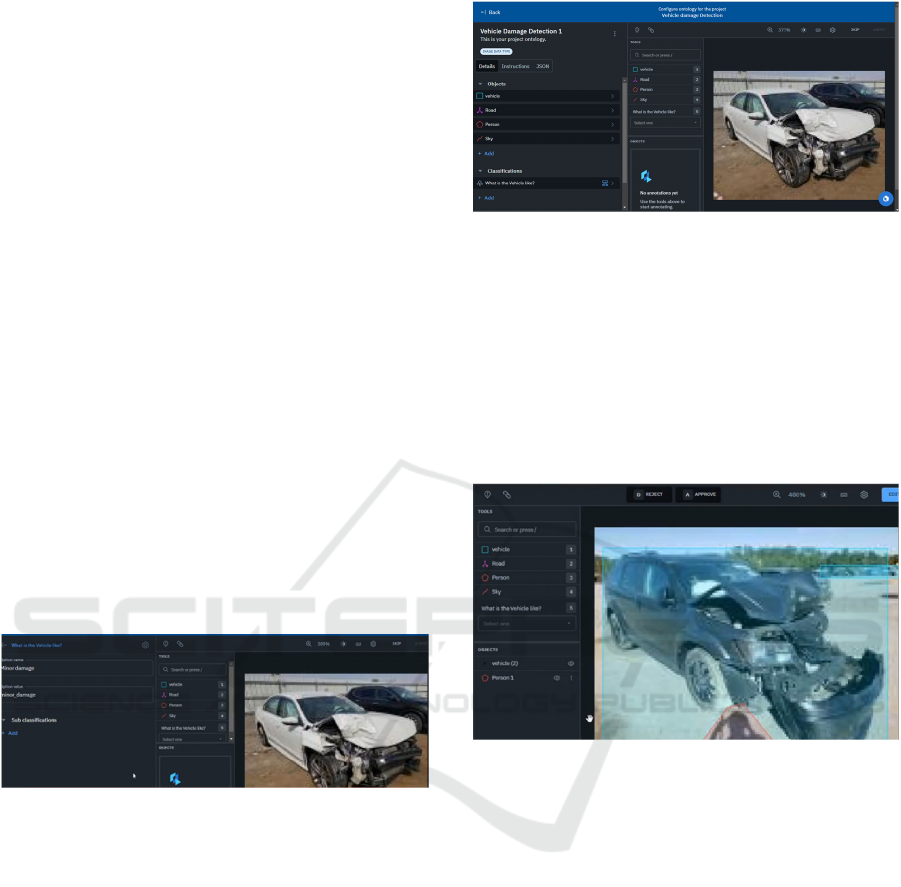
labeling schema (Ontology) that defines the different
types of damage and their severity levels as shown in
figure 3. This schema (Ontology) provides a
standardized set of labels that can be used
consistently across the dataset.
Step 3 was to select the images that need to be
annotated. This can be done manually or using
automated tools. The selection process should ensure
that the images are representative of the different
types of damage and severity levels. The fourth step
is to annotate the images with the corresponding
labels or metadata. This can be done manually or
using automated tools, as discussed earlier.
Figure 3: Data Annotation (ontology).
During the annotation process, it is essential to
maintain a high level of accuracy and consistency
across the dataset. This means that the annotators
need to be trained on the labeling schema and given
clear instructions on how to apply the labels to the
images. It also means that the annotations need to be
reviewed and validated to ensure that they are correct
and consistent as shown in the labelling schema in
figure 4.
Figure 4: Labelling schema.
In addition to the labeling schema (ontology), it is
also essential to maintain a record of the annotations
and their corresponding images. This record should
include information about the annotator, the date and
time of the annotation, and any notes or comments
related to the annotation. This record can be used to
track the progress of the annotation process and to
identify any errors or inconsistencies that need to be
corrected.
The quality of the annotated dataset is critical to
the performance of the deep learning model. A high-
quality dataset is one that is accurate, consistent, and
representative of the use case. To ensure the quality
of the dataset, it is essential to perform regular quality
checks and validation on the annotations. This can be
done using manual reviews or using automated tools
that compare the annotations to ground truth labels or
other sources of truth.
Revolutionizing Vehicle Damage Inspection: A Deep Learning Approach for Automated Detection and Classification
203
3.2.3 Data Augmentation
To improve the dataset's quality, data augmentation
techniques such as flipping, rotation, and scaling was
used to increase the diversity of the dataset.
3.2.4 Data Splitting
Data splitting is essential to prevent overfitting,
which can occur when a model is too closely tailored
to the training data. The model needs to be trained to
recognize and classify the different types of damage
accurately, such as dents, scratches, and cracks, and
to differentiate between different levels of severity.
This is a complex task that requires a large and
diverse dataset, which must be split into appropriate
subsets for training, validation, and testing.
The training subset is the largest of the three
subsets. It is used to train the model to recognize
patterns and features in the data that correspond to
different types and levels of damage.
The validation subset was used to tune the model's
hyperparameters, such as the learning rate, batch size,
and number of epochs. Hyperparameters are
important as they control how the model learns from
the training data, and they can significantly impact the
model's performance. The validation set is used to
fine-tune the hyperparameters, allowing the model to
generalize better to new data.
The testing subset was used to evaluate the final
model's performance. It is kept separate from the
training and validation sets and is used to simulate
how the model will perform on new, unseen data. The
performance on the testing set provides an unbiased
estimate of how well the model will perform in the
real world.
The dataset comprises 1631 images of vehicle
damage with corresponding labels indicating the type
of damage (e.g., scratches, dents, cracks, etc.). This
dataset is randomly divided into training, validation,
and testing subsets with a 70-15-15 split. 70% of the
dataset used for training, 15% for validation, and 15%
for testing.
The table 2 below illustrates the process:
Table 2: Training and testing results.
DATASET NUMBER OF IMAGES PERCENTAGE
Training Set 1141 70%
Validation Set 245 15%
Testing Set 245 15%
After splitting the dataset, the training set was used to
train the model and adjust the model's hyper
parameters using the validation set. Once the model's
performance is optimized, the testing set evaluates its
accuracy.
3.2.5 Data Encoding
Data encoding is necessary to transform the catego-
rical labels of vehicle damage types into numerical
values that machine learning algorithms can
understand.
The dataset of images of damaged vehicles with
corresponding labels indicating the type of damage.
The labels include categories such as "Scratch,"
"Dent," "Crack,", "Tear", "Chip”, “Glass Damage",
"Spider Crack", "Large range glass damage",
"Miscellaneous damage" and "Broken Windows." To
use this data for machine learning algorithms, there is
a need to encode these categorical labels into
numerical values.
One standard data encoding method used is one-
hot encoding, where each category is assigned a
unique numerical value, represented as a binary
vector.
The datasets consist of 1631 images of damaged
vehicles, with corresponding labels indicating the
type of damage. Table 3 shows a sample of the dataset
and the corresponding encoded labels using one-hot
encoding:
Table 3: Sample of the dataset and the corresponding
encoded labels using one-hot encoding.
IMAGE LABEL ENCODED LABEL
Image 1 Scratch [1, 0, 0, 0, 0, 0, 0, 0, 0,0]
Image 2 Dent [0, 1, 0, 0, 0, 0, 0, 0, 0,0]
Image 3 Crack [0, 0, 1, 0, 0, 0, 0, 0, 0,0]
Image 4 Broken Window [0, 0, 0, 1, 0, 0, 0, 0, 0,0]
Image 5 Tear [0, 0, 0, 0, 1, 0, 0, 0, 0,0]
Image 6 Chip [0, 0, 0, 0, 0, 1, 0, 0, 0,0]
Image 7 Spider Crack [0, 0, 0, 0, 0, 0, 1, 0, 0,0]
Image 8 Miscellaneous Damage [0, 0, 0, 0, 0, 0, 0, 1, 0,0]
Image 9 Large Range Glass
Damage
[0, 0, 0, 0, 0, 0, 0, 0, 1,0]
Image 10 Metal Damage [0, 0, 0, 0, 0, 0, 0, 0, 0,1]
… … …
Image 1627 Scratch [1, 0, 0, 0, 0, 0, 0, 0, 0,0]
Image 1628 Scratch [0, 1, 0, 0, 0, 0, 0, 0, 0,0]
Image 1629 Crack [0, 0, 1, 0, 0, 0, 0, 0, 0,0]
Image 1630 Broken Window [0, 0, 0, 1, 0, 0, 0, 0, 0,0]
Image 1631 Scratch [0, 0, 0, 0, 1, 0, 0, 0, 0,0]
IoTBDS 2024 - 9th International Conference on Internet of Things, Big Data and Security
204
In table 3, the one-hot encoding assigns a unique
binary vector to each category, where the value 1
indicates the presence of the category in the label, and
0 indicates its absence. This encoded data can now be
used as input for machine learning algorithms to train
models for vehicle damage detection and
classification.
GANs are a type of neural network that can
generate new images similar to the input images
(Amrutha, 2020). GANs are used to generate
synthetic images of damaged vehicles, which can be
used to augment the training data and improve the
performance of other deep-learning algorithms, while
DNNs have a more general architecture with fully
connected layers that can learn from any type of data.
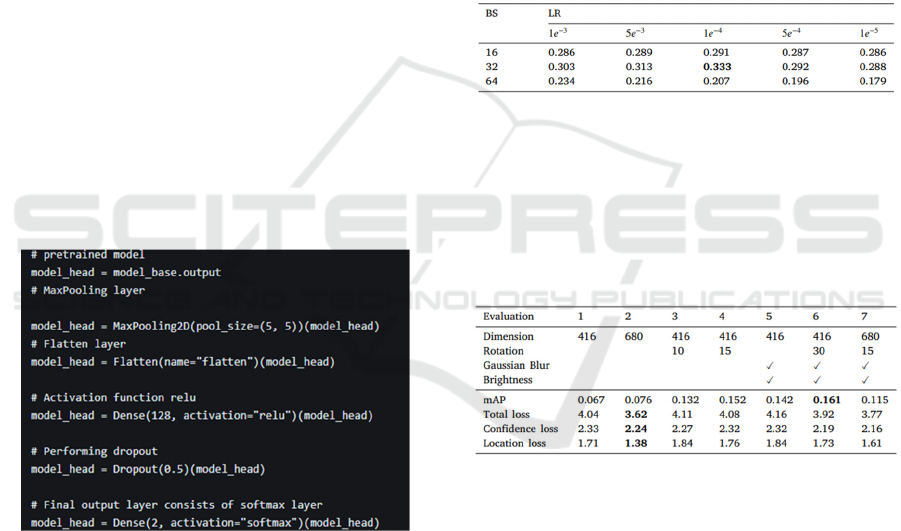
3.2.6 Creating Model to Train, Validate and
Test
For the first model a pre-trained mobile net
architecture was used without the top layer, this can
be used as a feature extractor for transfer learning.
Using a pre-trained model as a base, the knowledge
learned by the MobileNetV2 model can be leveraged
on a large dataset and adapted to a new task with a
smaller dataset.
model_final = Model(inputs=model_base.input,
outputs=model_head)
Figure 5: Pre-training models.
Figure 5 shows the process of pre-training the models
enabling the model to capture the features and
knowledge from the dataset ensuring it generalizes
well to new data.
4 EXPERIMENTS AND RESULTS
A comprehensive analysis of the performance and
features of various models is necessary when
assessing them for vehicle damage detection. The
primary goal center's on the accurate detection and
categorization of various kinds of damage. Among
these metrics, accuracy is particularly important as a
key indicator of how well a model can identify and
categorize car damage. A high accuracy score
indicates not only how well the model performs in
precisely identifying damages, but also how far the
field has come as we navigate the most recent
improvements in automotive damage identification.
(Gidaris and Komodakis, 2014).
Table 4 shows results for the experiments for
Batch size and learning rate optimization. Using 𝛼
𝑐𝑟𝑜𝑝 = 0.3 and 𝛼 𝑝𝑎𝑑 = 1.7, 50 epochs, dataset mean
scaling, and ignoring the aspect ratio. Results are
reported in terms of the mAP.
Table 4: Batch size and learning rate optimization.
The effect of augmentation on scratch detection is
shown in table 5. using a subset of images which
contains at least one scratch. Using hyperparameters:
𝛼 𝑐𝑟𝑜𝑝 = 0.3, 𝛼 𝑝𝑎𝑑 = 1.7, horizontal flipping(𝑝 =
0.5), resize while ignoring the aspect ratio, 𝐿𝑅 = 1𝑒
−4, and 𝐵𝑆 = 32.
Table 5: Augumentation of scratch detection.
Preserving the aspect ratio has not shown any
notable enhancement compared to disregarding it.
However, when considering individual classes,
maintaining the aspect ratio leads to a higher mean
Average Precision (mAP) for the "Missing" class.
Conversely, ignoring the aspect ratio appears to
improve the mAP for the "Hail" and "Scratch"
classes.
The Scratch dataset's performance is depicted
across seven evaluations, with the first evaluation
serving as the reference point. The model displays
greater precision in object detection for larger image
sizes, but there is only a slight increase in the mean
Average Precision (mAP). As the mAP score
considers objects with an Intersection over Union
(IoU) of at least 0.5, it implies that the larger image
Revolutionizing Vehicle Damage Inspection: A Deep Learning Approach for Automated Detection and Classification
205

Table 6: Confusion Matrix with the prediction rows and ground truth threshold.
size enhances the location accuracy of boxes that
already had an IoU of 0.5. Evaluations 3 to 6
demonstrate that the mAP benefits from Rotation,
Gaussian Blur, and Brightness adjustment. The most
outstanding mAP is attained with evaluation 6.
The confusion matrix table provides a summary
of the model's predictions and actual outcomes for
detecting the listed categories of damages ranging
from bend to no physical damage. The measure of
accuracy of detection is calculated by the proportion
of correctly classified damages divided by the total
number of damages. The proportion of true positive
predictions among all actual positive detection shows
its rate of recall and ability to detect all instances of
damage without missing any. The precision value is
determined by true-positive predictions amongst all
detection predicted as positive.
Figure 6 shows a variety of annotated vehicles in
different lighting variations and varying degrees and
types of scratches the model was trained on.
Figure 6: Effect of augmentation on scratch detection.
Figure 7: Recall values.
Figure 8: F1-score.
Figure 9: Training and validation accuracy.
Figure 10: IOU values.
Precision and Recall are additional metrics that offer
valuable insights into the model's ability to minimize
false positives and negatives. Precision measures the
proportion of correctly identified positive instances
out of all positive ones, and it reflects the model's
ability to avoid labeling non-damaged areas as
damaged. Conversely, in figure 8, the graph shows
the recall rate of the model. Recall measures the
IoTBDS 2024 - 9th International Conference on Internet of Things, Big Data and Security
206

proportion of correctly Figure 7 identified positive
instances out of all actual positive instances. It
evaluates the model's ability to detect all instances of
damage without missing any.
To assess the model's overall effectiveness, the
F1-score is often utilized as shown in figure 8. The F1
score combines precision and recalls into a single
metric that provides a balanced evaluation of the
model's performance. It considers both the ability to
avoid false positives and negatives, providing a more
comprehensive assessment of the model's capabilities
(Wang et al., 2020). Figure 9 is the graph showing a
comparison of the training and validation accuracy.
Figure 10 shows the IOU value which is another
key metric in the evaluation of object detection and
segmentation models, it measures the accuracy of the
algorithm in terms of how well it can segment objects
within an image, it is calculated by taking the ratio of
the area of overlap between the predicted region and
the ground truth region to the area of union between
these two regions. The IoU value ranges from 0 to 1,
where: 0 indicates no overlap between the predicted
and ground truth regions and 1 indicates a perfect
overlap between the predicted and ground truth
regions.
The results obtained from the experiment
provided substantial evidence to support the
superiority of the Convolutional Neural Network
(CNN) model over the Deep Neural Network (DNN)
model. The CNN model demonstrated remarkable
performance with an impressive accuracy rate of
91%. In contrast, the DNN model, though yields
acceptable results, achieved a comparatively lower
accuracy rate of 84%. Furthermore, while showing
potential, the Generative Adversarial Network
(GAN) model achieved a modest accuracy rate of
78%.
5 CONCLUSION
This study applied Image Classification and Deep
Learning Algorithms for identifying and assessing
damaged vehicles. The images were collected
manually from open-source repositories. CNN, DNN
and GAN models were trained and tested. The study
successfully obtained satisfactory results in model
performance which were measured using the models’
accuracy, precision, recall, and F1-score. When it
comes to capturing spatial characteristics and patterns
in the dataset, convolutional layers are advantageous
because of the accuracy difference between the CNN
and DNN models. CNN was able to improve its
classification and prediction accuracy by extracting
complex features from photos and other spatial data.
Because the DNN model lacks the specialised
architecture intended for spatial comprehension, it
has difficulty efficiently capturing and processing
complicated spatial data, which has a negative impact
on accuracy.
While the accuracy rate of the GAN model was
not as high as that of the CNN and DNN models, its
main application is in the generation of new data
instances, rather than classification tasks. The 78%
accuracy rate indicates that the GAN model produced
credible synthetic data instances, which might be
useful for creating new samples or augmenting
existing data.
Testing of CNN, DNN, and GAN models revealed
signs of overfitting, which could potentially be
attributed to the restricted number of images available
in the dataset utilized for the study. Moreover, a
limited amount of damaged car part images from the
web with some images having a low resolution may
contribute to the misclassifications. It is
recommended to have larger datasets of vehicle
damages. Combining both CNNs and DNNs can
result in highly accurate vehicle damage detection
models that aid in evaluating the severity of damage
to accidented vehicles and thus determine the
necessary repairs. This will save time and enable car
fleet managers and insurance firms and other stake
holders assess vehicle damage and agreement of
claims more efficiently.
ACKNOWLEDGEMENTS
The authors express their gratitude to the University
Centre Middlesbrough-Middlesbrough College for
their financial support and for creating an opportunity
for the researchers to carry out this study.
REFERENCES
Amrutha, M. P. (2020). Automatic vehicle damage
detection from photographs using 3D CAD models.
International Journal of Innovative Technology and
Exploring Engineering, 9(4), 487-491..
Bengio, Y., Lecun, Y., and Hinton, G. (2015). Deep
learning. Nature, 521(7553), 436-444..
Chollet, F. (2017). Deep learning with Python. Manning
Publications..
Cireşan, D. C., Meier, U., Masci, J., & Schmidhuber, J.
(2012). Multi-column deep neural networks for image
classification. In Proceedings of the IEEE Conference
on Computer Vision and Pattern Recognition (CVPR)
(pp. 3642-3649)..
Revolutionizing Vehicle Damage Inspection: A Deep Learning Approach for Automated Detection and Classification
207

Gidaris, S. and Komodakis, N. (2014). Object detection via
a multi-region & semantic segmentation-aware CNN
model.
Hong-Jie Zhang, H., Yuan, Z., & Fang, M. (2022). A
model-based object detection method for automotive
damage identification. Measurement, 184, 111099..
Jeon, S., Kim, S., Kim, S., & Seo, J. (2020). Vision-based
vehicle damage detection for mobile inspection robot.
Applied Sciences, 10(1), 90..
Jiang, J., Luo, L., & Yang, C. (2021). Deep Learning.
Journal of Management Science and Engineering, 6(2),
30-40..
Jiang, X., Lu, H., & Lin, Z. (2021). Vehicle damage
detection and classification using deep learning.
Sensors, 21(2), 402.
Jiang, Y., & Ren, H. (2007). Context-aware damage
detection on industrial equipment using knowledge-
based framework. Journal of Intelligent Manufacturing,
18(6), 689-697..
Kim, S. H., Zhang, Y., & Shin, M. J. (2013). Vehicle
damage classification using deep learning. In
Proceedings of the 2013 IEEE International Conference
on Image Processing (ICIP) (pp. 2896-2900)..
Kim, S., Kim, T., & Lee, J. (2016). Deep learning approach
to damage classification. International Journal of
Precision Engineering and Manufacturing, 17(5), 583-
590.
Kumar, S. and Bhatnagar , G. (2021). Object Detection on
Edge Devices: A Review. Journal of Ambient
Intelligence and Humanized Computing, 12, 5493–
5513. [online] Available at: https://doi.org/10.1007/
s12652-021-03220-9.
Sarkar, S., Ray, S., & Kim, T. H. (2014). Vehicle damage
classification using convolutional neural networks. In
Proceedings of the 2014 IEEE Winter Conference on
Applications of Computer Vision (WACV) (pp. 440-
447).
Wang, C., Lil, Z. and Xu, C. (2020). Efficient
Convolutional Neural Networks for Vehicle Detection.
IEEE Access, 8, 168782–168791. [online] Available at:
https://doi.org/10.1109/ACCESS.2020.3023251.
White, J. R., Yang, J., & Yu, H. (2016). Damage
classification using hierarchical algorithms. Structural
Control and Health Monitoring, 13(4), 707-722..
Zhou, J., Jin, S., Yan, Q. and Lu, J. (2021). An Overview of
Model Compression Techniques for Deep Learning.
IEEE Transactions on Neural Networks and Learning
Systems, 32(4), 1410–1424. [online] Available at:
https://doi.org/10.1109/TNNLS.2020.3016158.
IoTBDS 2024 - 9th International Conference on Internet of Things, Big Data and Security
208
