
Towards Efficient Driver Distraction Detection with DARTS-Optimized
Lightweight Models
Yassamine Lala Bouali
1,2 a
, Olfa Ben Ahmed
1 b
, Smaine Mazouzi
2 c
and Abbas Bradai
3 d
1
XLIM Research Institute, URM CNRS 7252, University of Poitiers, France
2
Computer Science Dept., University of 20 Aout 1955, Skikda, Algeria
3
University Cote d’Azur LEAT, CNRS UMR 7248, Biot, France
Keywords:
Human-Computer Interaction, Emotional States, Driver Distraction, DAS, Deep Learning, NAS, DARTS.
Abstract:
Driver Distraction is, increasingly, one of the major causes of road accidents. Distractions can be caused
by activities that may shift the driver’s attention and potentially evoke negative emotional states. Recently,
there has been notable interest in Driver Assistance Systems (DAS) designed for Driver Distraction Detection
(DDD). These systems focus on improving both safety and driver comfort by issuing alerts for potential haz-
ards. Recent advancements in DAS have prominently incorporated deep learning techniques, showcasing a
shift towards sophisticated and intelligent approaches for enhanced performance and functionality. However,
model architecture design is mainly based on expert knowledge and empirical evaluations, which are time-
consuming and resource-intensive. Hence, it is hard to design a model that is both efficient and accurate at the
same time. This paper presents a Neural Architecture Search (NAS)-based approach for efficient deep CNN
design for DDD. The proposed approach leverages RGB images to train a lightweight model with few parame-
ters and high recognition accuracy. Experimental validation is performed on two driver distraction benchmark
datasets, demonstrating that the proposed model outperforms state-of-the-art models in terms of efficiency
while maintaining competitive accuracy. We report 99.08% and 93.23% with model parameter numbers equal
to 0.10 and 0.14 Million parameters for respectively SFD and AUC datasets. The obtained architectures are
both accurate and lightweight for DDD.
1 INTRODUCTION
With the development of smart vehicles, Driver As-
sistance System (DAS) in human-centered transporta-
tion has attracted much attention in recent years (Xing
et al., 2021). Using an intuitive Human-Machine in-
terface, such systems aim to enhance driver comfort,
ensure safety, and assist drivers. Driver monitoring
in terms of emotions, behaviors, and actions is a key
application of DAS to control the driver’s mood and
emotions (McCall and Trivedi, 2006). In this con-
text, Affective Computing is revolutionizing the au-
tomotive industry by creating DAS capable of rec-
ognizing, interpreting, processing, and responding to
human emotions and behaviors (Nareshkumar et al.,
2023). Through the integration of sensors, cameras,
a
https://orcid.org/0000-0002-2133-6086
b
https://orcid.org/0000-0002-6942-2493
c
https://orcid.org/0000-0003-3587-7657
d
https://orcid.org/0000-0002-6809-4897
and AI algorithms, vehicles can detect signs of fa-
tigue, stress, or distraction. This prompts the vehi-
cle to issue alerts or take corrective actions, thereby
ensuring driver safety.
Driver distraction is a major cause of road acci-
dents. According to recently published statistics (for
Statistics and Analysis, 2023), eight percent of fatal
car accidents are due to distraction. Indeed, nowa-
days, drivers are continually bombarded with poten-
tial distractions due to the widespread use of smart-
phones, infotainment systems, and various other in-
car technologies. These circumstances can compro-
mise the driver’s attentiveness and disturb their over-
all mood, thereby impacting their ability to drive
safely. Driver distraction can be categorized into three
main types (Lee, 2005): 1) visual distraction, such
as diverting one’s gaze away from the roadway, 2)
cognitive distraction, which involves the mind being
diverted from the road, and 3) manual distraction,
including activities like responding to a ringing cell
phone. It is worth noting that distractions caused by
480
Lala Bouali, Y., Ben Ahmed, O., Mazouzi, S. and Bradai, A.
Towards Efficient Driver Distraction Detection with DARTS-Optimized Lightweight Models.
DOI: 10.5220/0012595400003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 1, pages 480-488
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

a driver’s activities can potentially lead to a shift in
emotional state. Indeed, recent psychological stud-
ies have shown that driver emotions can be aroused
and activated by driver activities, such as a call phone,
texting information, or radio information (Fern
´
andez
et al., 2016). Concretely, attentive drivers focus on
the vehicle, the traffic, and the surroundings enabling
them to anticipate to unforeseen dangers. A serious
problem can arise when a driver loses attention and
becomes concentrated on an extra event (activity) that
affects his mental and emotional states. For exam-
ple, using a phone and having a nervous conversation
can transform the affective state of the driver and de-
crease driving performance and concentration. Such
an event or behavior redirects the driver’s attention
and makes driving difficult and unsafe.
Artificial Intelligence has significantly revolution-
ized the DAS by the investigation of deep learning
techniques. Deep learning, especially Convolutional
Neural Networks (CNNs), have been widely used for
driver behavior (Shahverdy et al., 2020) and emo-
tions (Zepf et al., 2020) recognition. Existing models
are hand-designed, and obtained after several exper-
iments on different architectures and substantial pa-
rameters tuning. Despite good model performance,
the parameter size poses a significant challenge for
real-world applications due the limitations of vehicle-
mounted computing equipment.
In this paper, we propose a gradient-based NAS
method for automatic deep neural network design in
the context of DDD. The proposed method is based
on a Differentiable Architecture Search (DARTS).
The latter is known for its reduced search cost, com-
pared to non-differentiable NAS, and flexibility for
searching for high-performance architectures. We use
RGB images to search for light models with few pa-
rameters and high recognition accuracy. We con-
duct experiments on two driver distraction benchmark
datasets namely, the State Farm Distracted Driver
Dataset (SFD) and the American University in Cairo
Distracted Driver Dataset (AUC). To the best of our
knowledge, our work is the first to investigate DARTS
for a real-world application, namely driver distrac-
tion detection. The rest of the paper is organized as
follows: Section 2 discusses recent works on deep
learning-based methods for DDD. Section 3 describes
the proposed method. Section 4 presents experiments
and results and finally, section 5 concludes the work
and opens new perspectives.
2 RELATED WORK
Driver distraction detection field has been notably
influenced by the transformative capacities of deep
learning, especially Convolutional Neural Networks
(CNNs) (Li et al., 2021). Therefore, a variety of ap-
proaches using multiple data types and sensors have
been proposed in the literature for the DDD. For in-
stance, some works investigated multi-sensing data
(Nidamanuri et al., 2022) (Das et al., 2022) and bi-
ological signals (Chen et al., 2022) (Dolezalek et al.,
2021). However, fusing data from different sensors
is complex and requires the presence of all sensors
in the prediction phase. Moreover, leveraging phys-
iological data, to infer and understand the cognitive
and emotional states of drivers can be deemed in-
vasive due to their reliance on physiological mea-
surements. Visual data, namely RGB images, has
emerged as the most effective and affordable infor-
mation due to its non-intrusive nature. This practical-
ity makes it suitable for real-world applications (Zeng
et al., 2022). In this context, CNNs have been exten-
sively trained on large-scale imaging datasets for the
DDD (Koay et al., 2022). For instance, (Ai et al.,
2019) proposed an attention-based CNN combined
with VGG16 and built an accurate model with 140M
parameters. (Dhakate and Dash, 2020) integrated fea-
tures extracted from RESNET, InceptionV3, Xcep-
tion, and VGG networks and trained a second-level
neural network and achieved an accuracy of 92.20%
on the State Farm dataset (SFD) with 25.60 M param-
eters. Similarly, (Eraqi et al., 2019) utilized a genetic
algorithm to assign weights to a CNN ensemble and
achieved 94.29% accuracy with 62.00 M parameters
on the American University in Cairo dataset (AUC).
(Huang and Fu, 2022) proposed a deep 3D residual
network with an attention mechanism and encoder-
decoder for predicting the true driver’s focus of atten-
tion. (Wang and Wu, 2023) enhanced the generaliza-
tion of DDD using multi-scale feature learning and
domain adaptation, achieving an accuracy of 96.82%
on SFD with 23.67 M parameters.
However, the aforementioned models remain too
large. Indeed, the automotive context requires
lightweight solutions, and neglecting such constraints
may result in models that are accurate but ineffi-
cient. Addressing this challenge, recent works have
proposed hand-crafted lightweight models such as
MobileNetV2-tiny, (Wang et al., 2022b) and MTNet
(Zhu et al., 2023). Nevertheless, manually designing
CNN is a time-consuming and iterative task that of-
ten requires a high level of expert knowledge. More-
over, the iterative nature of the design process implies
training models until a satisfactory result leading to
Towards Efficient Driver Distraction Detection with DARTS-Optimized Lightweight Models
481
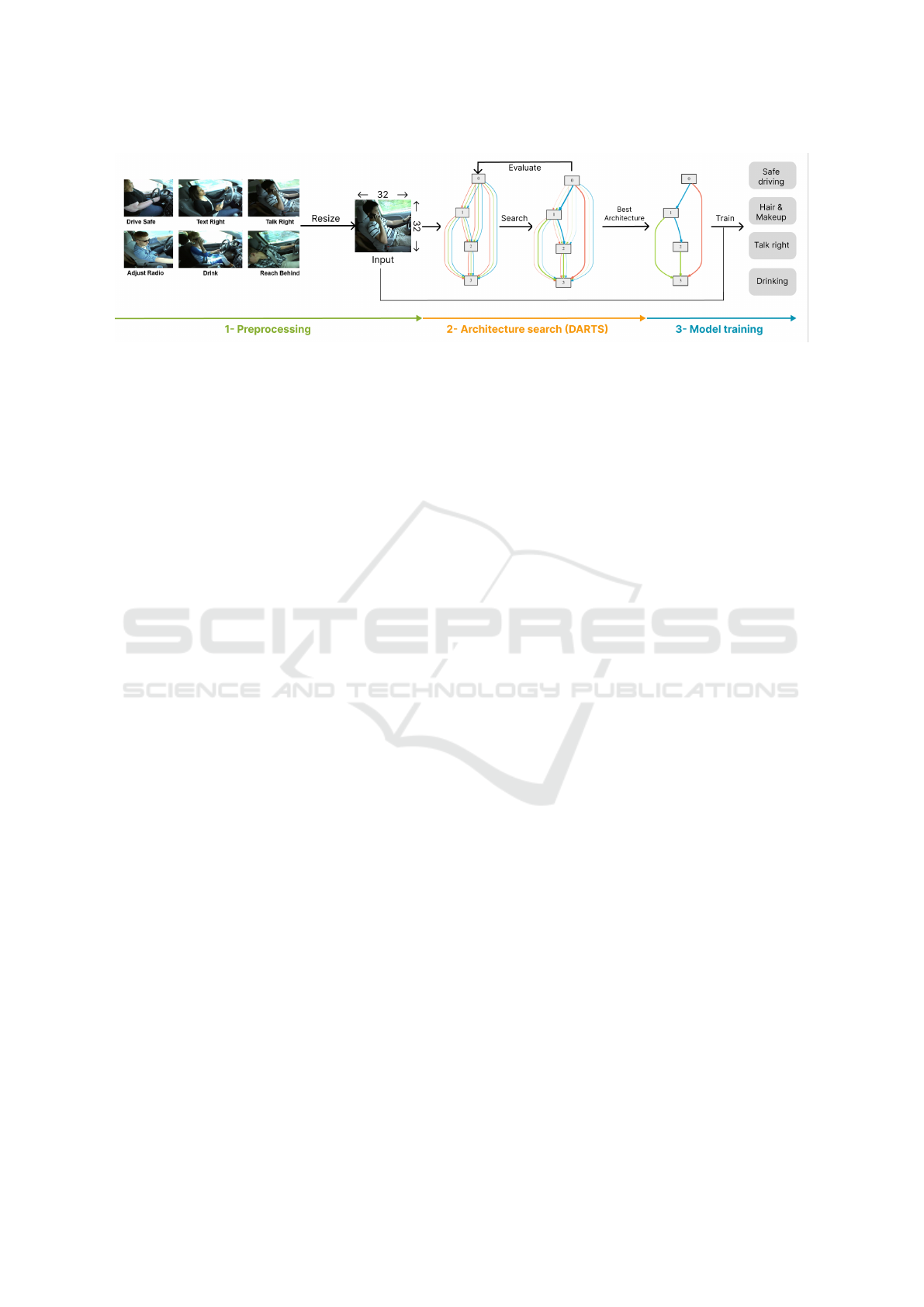
Figure 1: Illustration of the proposed approach.
an excessive consumption of resources.
Recently, Neural Architecture Search (NAS) has
emerged as a new paradigm to address this chal-
lenge by automating the design of neural architec-
tures. NAS has been widely used for computer vi-
sion applications (Kang et al., 2023). However, de-
spite its potential, scarce are the works that have ex-
plored NAS for detecting driver distraction. Recently,
(Seong et al., 2022) employed reinforcement learning
in conjunction with a weight-sharing method for real-
time recognition of driver behavior. They gathered
their own data and found that their proposed model
outperformed hand-crafted models. However, the
lack of testing on benchmark datasets makes a com-
prehensive evaluation impossible. Moreover, (Zaman
et al., 2022) integrated an enhanced faster R-CNN
with NasNet large CNN to identify driver emotions.
They also used a private dataset and compared their
model with static emotion recognition datasets. In ad-
dition, (Chen et al., 2021) fused data from multiple
sources and used NAS to generate a CNN architec-
ture that identify normal driving and distraction states.
However, the resulting CNN was large and did not
fully meet the specific requirements of its intended
use. Lastly, (Liu et al., 2023) presented a NAS-based
teacher-student model with knowledge distillation for
the same task. This study achieved a lightweight
model with 0.42 M parameters. To our knowledge,
this is the unique study that has used benchmark pub-
lic datasets and NAS for DDD, making it the most
pertinent reference to our work.
3 PROPOSED APPROACH
Considering the pivotal importance of detecting driver
distraction, it is crucial to emphasize the need for a
detection model that not only proves effective but is
also lightweight enough for practical deployment. In
this section, we describe the proposed approach to ef-
ficiently detect driver distraction. Figure 1 illustrates
the main steps of our approach: 1) Preprocessing, 2)
Architecture search, and 3) Model training.
First, we preprocess the input data to ensure it is
in a suitable format for our model. Therefore, we
resize the images to 32x32 pixels. We believe that
this is a crucial step that contributes to achieving a
balance between precision and efficiency. Moreover,
using a smaller image size during the search process
can accelerate the exploration, as it reduces computa-
tional requirements. This facilitates a more efficient
and faster architecture search process, helping in the
discovery of lightweight yet effective model architec-
tures.
Second, we perform a Differentiable Architecture
Search (DARTS) (Liu et al., 2019) to look for the best
network architecture for our DDD task. We inves-
tigate DARTS as a cutting-edge technique that auto-
mates the exploration of a diverse space of neural net-
work architectures. Therefore, DARTS facilitates the
search for architectures that excel in both efficiency
and accuracy.
The architecture search problem is formulated as
a bi-level optimization problem. As stated in Eq. 1,
in the upper level, DARTS searches for an architec-
ture by minimizing a validation loss using gradient
descent. Simultaneously, in the lower level, the algo-
rithm fine-tunes the neural network weights based on
the architecture identified in the upper-level optimiza-
tion.
min
α
L
val
(w
∗
(α), α)
s.t. w
∗
(α) = argmin
w
L
train
(w, α) (1)
DARTS achieves computational efficiency by rep-
resenting the architecture search space as a directed
acyclic graph (DAG) with N nodes. Each directed
edge (i, j) in the graph is associated with a set of can-
didate operations o
(i, j)
transforming node x
( j)
:
x
( j)
=
∑
i< j
o
(i, j)
(x
(i)
) (2)
EAA 2024 - Special Session on Emotions and Affective Agents
482

The continuous distribution of weights or proba-
bilities, modeled using the Softmax function, allows
for gradient-based optimization in the search space.
Therefore, the architecture gradient is approximated
as follows:
∇
α
L
val
(w − ξ∇
w
L
train
(w, α), α) (3)
We apply the search space defined in DARTS (Liu
et al., 2019), i.e., a supermodel formed by repeatedly
stacking normal and reduction cells. Each cell is a
collection of nodes. The operations involved in darts
are max pooling 3x3, average pooling 3x3, skip con-
nect, separable convolution 3x3 and 5x5, and dilated
convolution 3x3 and 5x5.
Third, following the architecture search, we
meticulously train the resulting models on two dis-
tinct benchmark datasets. This approach allows us to
analyze the generalization capabilities of the architec-
tures and provide further insights into the proposed
methodology. Finally, we rigorously evaluate the per-
formance of our model on the testing dataset.
4 EXPERIMENTS AND RESULTS
4.1 Distracted Drivers Datasets
We evaluate our approach on two benchmark datasets
illustrated in Figure 2, namely, the State Farm Dis-
tracted Driver Dataset (SFD) (Anna Montoya, 2016)
and the American University in Cairo Distracted
Driver Dataset (AUC) (Eraqi et al., 2019).
Figure 2: Sample images from SFD and AUC.
State Farm Distracted Driver Dataset (SFD). is
made up of 22,424 images, all of which were taken
from video footage recorded with cameras positioned
on a car’s dashboard. Each image in the collection is
tagged with the specific activity the driver is engaged
in at the time the image was captured. These activi-
ties include safe driving (0), texting on the right (1),
talking on the phone-right (2), texting-left (3), talking
on the phone-left (4), operating the radio (5), drink-
ing (6), reaching behind (7), hair and makeup (8), and
talking with a passenger (9). This dataset has been ex-
tensively used in research and has contributed to the
creation of a variety of models for detecting driver
distraction. We split the dataset into three sets : 60%
for training, 10% for validation, 30% for testing.
American University in Cairo Distracted Driver
Dataset (AUC). is made up of video footage that
captures drivers engaging in various activities. The
videos were recorded from two distinct perspectives
and each video is approximately 10 minutes in dura-
tion. The dataset encompasses a total of 44 partic-
ipants, with 29 males and 15 females, and includes
over 17000 frames. The images are categorized into
the following classes: safe driving (0), texting left (1),
talking on the phone-left (2), texting right (3), talking
on the phone-right (4), adjust the radio (5), drinking
(6), reaching behind (7), hair and makeup (8), talking
to passenger (9). The dataset is already split into train
and test sets by the original authors. In addition, we
use 10% of the training data to perform validation.
4.2 Experimental Setups
Hyperparameters and Preprocessing: we em-
ployed the Cosine Annealing scheduler to dynami-
cally modify the learning rate with a lower limit of 1e-
3. The initial learning rate was fixed to 0.025. Cross-
validation and early stopping, with a patience of 10
iterations, were also incorporated during the training
phase of the final architecture. The number of epochs
varied, as the requirements for training and searching
differed for each dataset. Specifically, training was
conducted over a maximum of 60 epochs, each con-
sisting of 1900 steps, while the search process lasted
for 3 epochs of 1700 iterations each. We used the
corss-entropy loss and SGD optimizer.
Architecture Search: to automatically find the
best-performing architecture, we conduct a differen-
tiable architecture search (DARTS) on both SFD and
AUC datasets. With regards to our specific task, i.e.,
DDD, we carefully initialize our supermodel with a
width of 8 and 8 stacked cells. The model’s com-
plexity and the search cost are significantly impacted
by two primary hyperparameters: the width and the
number of channels. The width, which refers to the
number of neurons in a layer, and the number of chan-
nels, indicating the depth of the feature maps, are both
experimentally set to eight in our supermodel. As a
Towards Efficient Driver Distraction Detection with DARTS-Optimized Lightweight Models
483
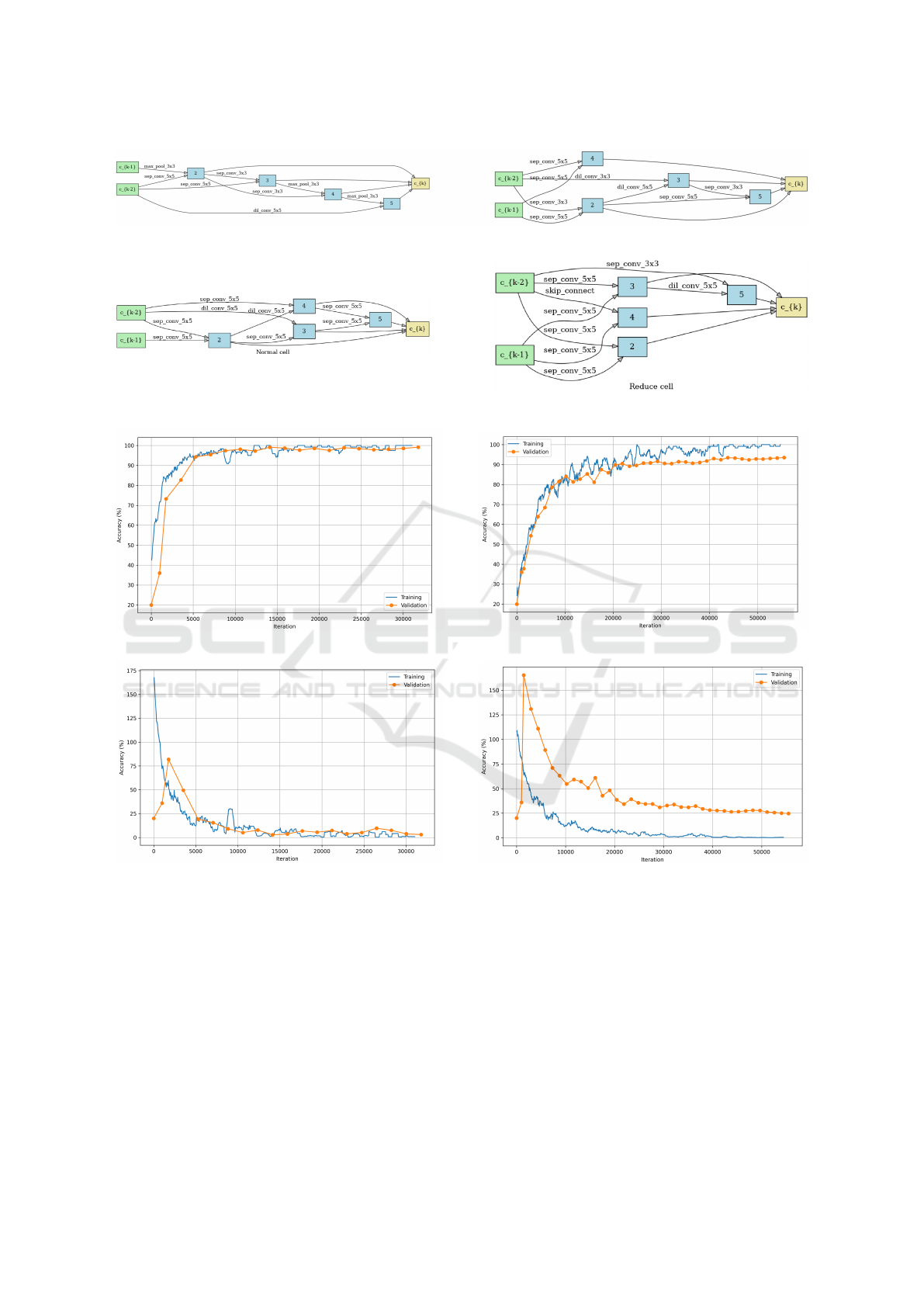
Figure 3: Cells structures of final architecture on SFD.
Figure 4: Cells structures of final architecture on AUC.
(a) (b)
(c) (d)
Figure 5: Training performances of both architectures on SFD (left column) and AUC (right column).
result, our supermodel contains approximately 0.96
million parameters.
We then run the search for a total of 3 epochs with
1766 steps per epoch. Figure 3 illustrates the cell
structures of the final architectures. We notice that,
on SFD, the cells mostly contain separable convolu-
tion operations as well as a few dilated convolutions
and maxpooling. Similar operation choices are ob-
served on AUC dataset in Figure 4. This consistency
across different datasets may indicate that the discov-
ered architecture is potentially generalizable and not
overfitting to a specific dataset.
4.3 Model Training and Classification
Results
Following the architecture search, we then train the
resulting architectures on both SFD and AUC sepa-
rately. We evaluate the classification performances of
the models through various metrics including : 1) val-
idation loss and accuracy, 2) test accuracy, 3) preci-
EAA 2024 - Special Session on Emotions and Affective Agents
484
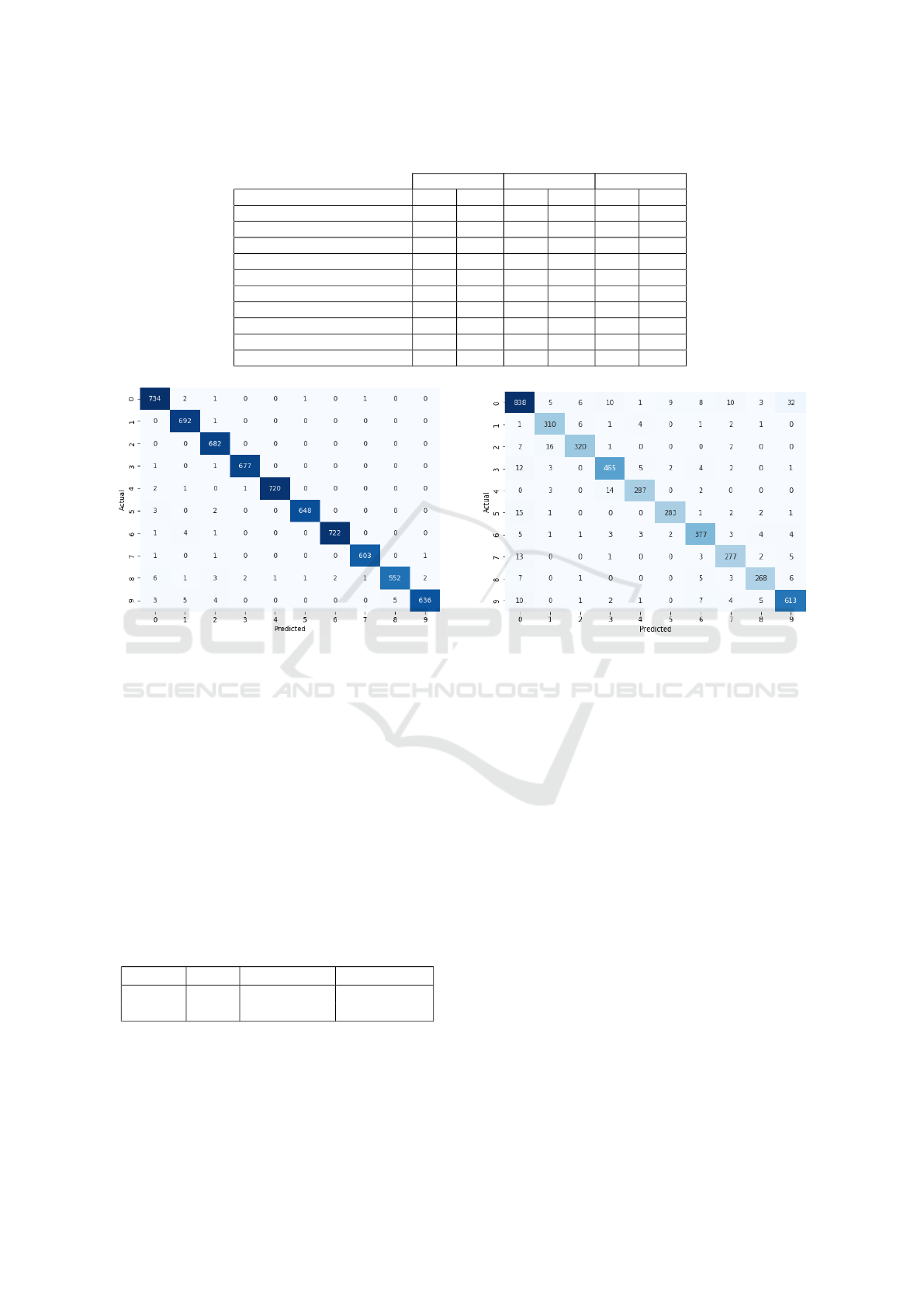
Table 1: Achieved Recall, Precision, and F1 score for each class of SFD / AUC.
Precision Recall F1-score
Driver Activity SFD AUC SFD AUC SFD AUC
Safe Driving 0.98 0.93 0.99 0.91 0.99 0.92
Texting - Right 0.98 0.94 1.00 0.94 0.99 0.94
Talking on the phone - Right 0.98 0.95 1.00 0.94 0.99 0.95
Texting - Left 1.00 0.91 1.00 0.95 1.00 0.93
Talking on the phone - Left 1.00 0.96 0.99 0.94 1.00 0.95
Operating the radio 1.00 0.96 0.99 0.93 0.99 0.94
Drinking 1.00 0.92 0.99 0.94 0.99 0.93
Reaching behind 1.00 0.91 1.00 0.92 1.00 0.91
Hair and makeup 0.99 0.94 0.97 0.92 0.98 0.93
Talking to passenger 1.00 0.93 0.97 0.95 0.98 0.94
(a) (b)
Figure 6: Confusion matrices of both architectures on : (a) SFD and (b) AUC.
sion, 4) recall and, 5) F1-score. In addition, we pro-
vide further insights on the models’ efficiency by re-
porting the number of parameters, inference time and
search cost in Table 3.
4.3.1 Performance Evaluation
The learning curves (accuracy and loss) on each
dataset are illustrated in Fig. 5 where we observe a
faster training on SFD, taking nearly half of the time
required for AUC. This can be attributed to the chal-
lenging nature of AUC, primarily due to imbalanced
data distribution.
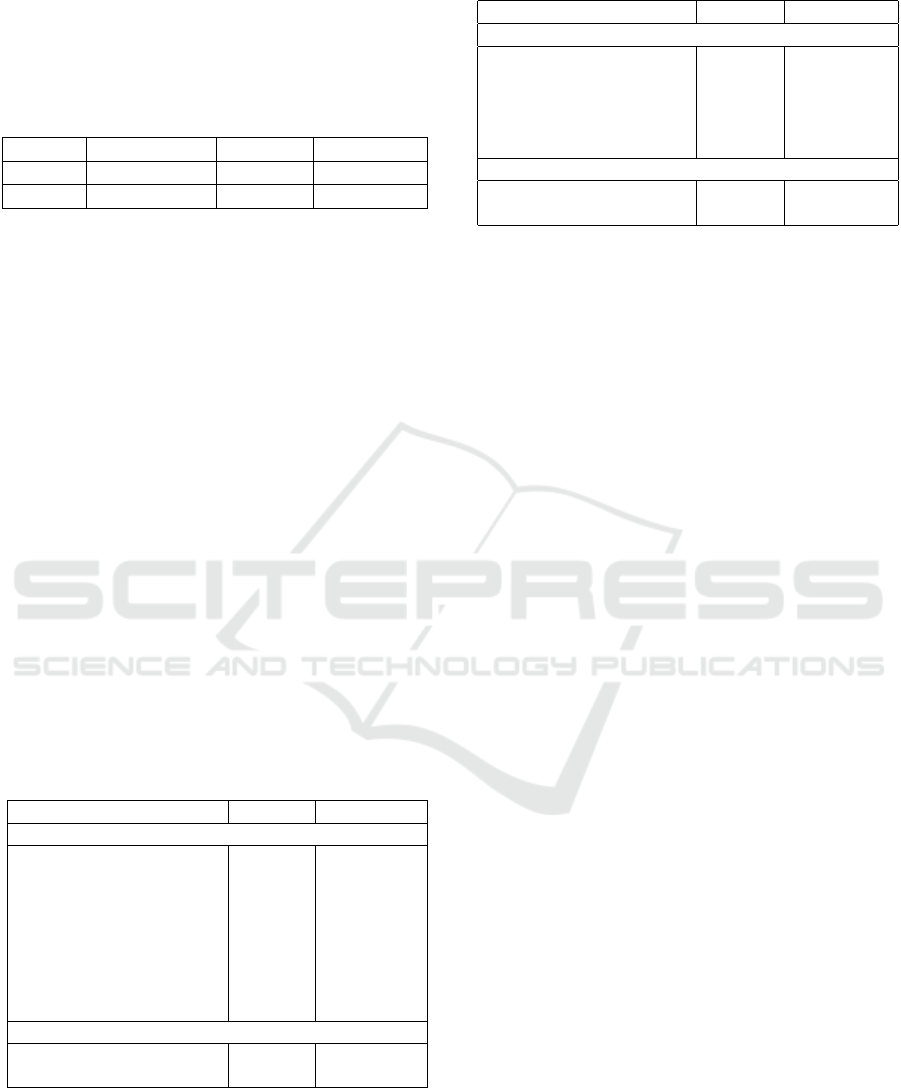
Table 2: Classification results.
Dataset L
val
↓ Acc
val
(%) ↑ Acc
test
(%) ↑
SFD 0.03 99.11 99.08
AUC 0.25 93.53 93.23
For the same underlying reasons, the classification
results, reported in Table 2, demonstrate increased ac-
curacy on SFD. Indeed, we notice a test accuracy of
99.08% for SFD and 91.85% for AUC. Moreover, Fig.
6a shows the confusion matrix of each dataset. We
notice that only a few images from SFD are wrongly
classified. For instance, six images of ”hair and
makeup” were classified as ”safe driving” likely due
to the similarity between these classes. This misclas-
sification may be attributed to the subtle similarity in
the head orientation. Hair and makeup involves mov-
ing hands while the posture of the head may remain
the same, i.e., focused on the road, which can be con-
sidered as safe. Similarly, on AUC, up to 32 images
from ”safe driving” were misclassified as talking to
passenger. Table 1 further emphasize these results
and presents precision, recall and f1-scores. The ta-
ble clearly indicates a lower rate of false positives on
SFD as well as a better consistency across metrics.
4.3.2 Efficiency Evaluation
We also evaluate the efficiency of the resulting mod-
els in terms of number of parameters, inference time
and search cost. These metrics are of high importance
considering the resource limited environment of DAS.
A model with fewer parameters is generally more ef-
ficient and easier to implement, making it a crucial
characteristic for driver distraction applications. Sim-
Towards Efficient Driver Distraction Detection with DARTS-Optimized Lightweight Models
485
ilarly, low inference time, i.e., fast response, is a de-
sirable characteristic in such an environment. The re-
sults are reported in Table 3. It is to note that we im-
plemented our approach using a GPU Nvidia Tesla
A100 32G.
Table 3: Model computational metrics.
Dataset Search cost ↓ Params ↓ Inference ↓
SFD 1h00 0.10 M 9 ms
AUC 1h30 0.14 M 10 ms
Firstly, we notice that the search process is re-
markably efficient, completing within a notably brief
timeframe of only 55min to 1.5 hours. Secondly, our
resulting models are extremely lightweight with 0.10
M and 0.14 M parameters for SFD and AUC respec-
tively. Furthermore, the inference time on the GPU
is impressively fast with 9 (ms) on SFD and 10 (ms)
on AUC. Similar inference is expected on in-car plat-
forms as studies have shown that lightweight archi-
tectures usually perform equal or better on CPUs than
GPUs (Li et al., 2023).
4.3.3 Comparison with State-of-the-Art
In evaluating our approach for DDD, we bench-
marked against existing state-of-the-art methods. As
a reminder, most of the studies using benchmark
datasets present hand-crafted approaches. Only a sin-
gle work by (Liu et al., 2023) uses non-differentiable
NAS. Notably, our work stands as the sole contributor
exploring DARTS in the context of DDD. We report
state-of-the-art on SFD in Table 4 and on AUC in Ta-
ble 5.
Table 4: Comparison with state of the art on SFD.
Work Acc (%) Params (M)
Hand-crafted
(Dhakate and Dash, 2020) 92.90 25.60
(Baheti et al., 2020) 99.75 2.20
(Qin et al., 2021) 99.82 0.76
(Hossain et al., 2022) 98.12 3.50
(Wang et al., 2022b) 99.88 2.78
(Wang et al., 2022a) 99.91 9.02
(Wang and Wu, 2023) 96.82 23.67
(Mittal and Verma, 2023) 99.50 8.50
NAS
(Liu et al., 2023) 99.87 0.42
Ours (2023) 99.08 0.10
Table 5: Comparison with state of the art on AUC.
Work Acc (%) Params (M)
Hand-crafted
(Eraqi et al., 2019) 94.29 62.00
(Ai et al., 2019) 87.74 140
(Baheti et al., 2020) 95.24 2.20
(Qin et al., 2021) 95.64 0.76
(Mittal and Verma, 2023) 95.59 8.50
NAS
(Liu et al., 2023) 96.78 0.42
Ours (2023) 93.23 0.14
We first assess hand-crafted methodologies on
SFD where traditional CNNs such as VGG16
(Dhakate and Dash, 2020) and Capsule Networks
(Mittal and Verma, 2023) are employed. Our ap-
proach achieves a comparable accuracy of 99.08%
while having x7 times fewer parameters than the
best performing study by (Qin et al., 2021) in terms
of efficiency. Additionally, the comparison includes
well-established architectures like MobileNet (Hos-
sain et al., 2022) which is surpassed by our model
both in terms of accuracy and efficiency. Similarly,
despite the challenges posed by the AUC dataset, our
model showcases competitive performance, achieving
an accuracy of 93.23% while reducing the number of
parameters to 0.14 M.
In the NAS category, our approach establishes its
efficiency by achieving approximately x3 fewer pa-
rameters than the model reported by (Liu et al., 2023).
This emphasizes not only the accuracy but also the
computational efficiency of our method in compari-
son to the NAS counterpart.
Overall, our approach, guided by the innovative
application of DARTS, not only outperforms some
hand-crafted methodologies but also demonstrates ef-
ficiency gains, thereby contributing significantly to
the evolving landscape of DDD methodologies.
5 CONCLUSIONS
In this paper, we proposed an efficient Driver Distrac-
tion Detection with DARTS-optimized lightweight
models. We perform for the first time Differentiable
Architecture Searches to automatically find accurate
yet efficient models for a real-world application. We
discuss the challenges of hand-designed models and
the motivation behind NAS. We demonstrate that the
obtained models are extremely lightweight with high
classification performance compared to the state-of-
the-art. The efficiency gains, evidenced by the re-
duction in the number of parameters by almost three-
fold compared to state-of-the-art models, further em-
EAA 2024 - Special Session on Emotions and Affective Agents
486

phasize the practical viability of our approach. Fu-
ture works include a broader investigation of multiple
hardware as well as a more efficient search strategy.
ACKNOWLEDGEMENTS
This work was supported by the CHIST-ERA grant
SAMBAS (CHIST-ERA20-SICT-003), with funding
from FWO, ANR, NKFIH, and UKRI.
REFERENCES
Ai, Y., Xia, J., She, K., and Long, Q. (2019). Double at-
tention convolutional neural network for driver action
recognition. In (EITCE), pages 1515–1519.
Anna Montoya, Dan Holman, S. T. S. W. K. (2016). State
farm distracted driver detection.
Baheti, B., Talbar, S., and Gajre, S. (2020). Towards com-
putationally efficient and realtime distracted driver de-
tection with mobilevgg network. IEEE Transactions
on Intelligent Vehicles, 5(4):565–574.
Chen, J., Jiang, Y., Huang, Z., Guo, X., Wu, B., Sun, L.,
and Wu, T. (2021). Fine-grained detection of driver
distraction based on neural architecture search. IEEE
Transactions on Intelligent Transportation Systems,
22(9):5783–5801.
Chen, J., Li, H., Han, L., Wu, J., Azam, A., and Zhang,
Z. (2022). Driver vigilance detection for high-speed
rail using fusion of multiple physiological signals and
deep learning. Applied Soft Computing, 123:108982.
Das, K., Papakostas, M., Riani, K., Gasiorowski, A.,
Abouelenien, M., Burzo, M., and Mihalcea, R. (2022).
Detection and recognition of driver distraction using
multimodal signals. ACM Transactions on Interactive
Intelligent Systems, 12(4):1–28.
Dhakate, K. R. and Dash, R. (2020). Distracted driver de-
tection using stacking ensemble. In (SCEECS), pages
1–5. IEEE.
Dolezalek, E., Farnan, M., and Min, C.-H. (2021). Phys-
iological signal monitoring system to analyze driver
attentiveness. In (MWSCAS), pages 635–638. IEEE.
Eraqi, H. M., Abouelnaga, Y., Saad, M. H., and Moustafa,
M. N. (2019). Driver distraction identification with an
ensemble of convolutional neural networks. Journal
of Advanced Transportation, 2019.
Fern
´
andez, A., Usamentiaga, R., Car
´
us, J. L., and Casado,
R. (2016). Driver distraction using visual-based sen-
sors and algorithms. Sensors, 16(11):1805.
for Statistics, N. C. and Analysis (2023). Distracted driving
in 2021. Research Note DOT HS 813 443, National
Highway Traffic Safety Administration.
Hossain, M. U., Rahman, M. A., Islam, M. M., Akhter, A.,
Uddin, M. A., and Paul, B. K. (2022). Automatic
driver distraction detection using deep convolutional
neural networks. Intelligent Systems with Applica-
tions, 14:200075.
Huang, T. and Fu, R. (2022). Driver distraction detection
based on the true driver’s focus of attention. IEEE
Transactions on Intelligent Transportation Systems,
23(10):19374–19386.
Kang, J.-S., Kang, J., Kim, J.-J., Jeon, K.-W., Chung,
H.-J., and Park, B.-H. (2023). Neural architecture
search survey: A computer vision perspective. Sen-
sors, 23(3):1713.
Koay, H. V., Chuah, J. H., Chow, C.-O., and Chang, Y.-L.
(2022). Detecting and recognizing driver distraction
through various data modality using machine learn-
ing: A review, recent advances, simplified framework
and open challenges (2014–2021). Engineering Ap-
plications of Artificial Intelligence, 115:105309.
Lee, J. D. (2005). Driving safety. Reviews of human factors
and ergonomics, 1(1):172–218.
Li, H., Wang, Z., Yue, X., Wang, W., Tomiyama, H., and
Meng, L. (2023). An architecture-level analysis on
deep learning models for low-impact computations.
Artificial Intelligence Review, 56(3):1971–2010.
Li, W., Huang, J., Xie, G., Karray, F., and Li, R. (2021).
A survey on vision-based driver distraction analysis.
Journal of Systems Architecture, 121:102319.
Liu, D., Yamasaki, T., Wang, Y., Mase, K., and Kato,
J. (2023). Toward extremely lightweight distracted
driver recognition with distillation-based neural archi-
tecture search and knowledge transfer. IEEE Transac-
tions on Intelligent Transportation Systems.
Liu, H., Simonyan, K., and Yang, Y. (2019). Darts: Differ-
entiable architecture search.
McCall, J. and Trivedi, M. M. (2006). Driver monitoring for
a human-centered driver assistance system. In Pro-
ceedings of the 1st ACM international workshop on
Human-centered multimedia, pages 115–122.
Mittal, H. and Verma, B. (2023). Cat-capsnet: A convo-
lutional and attention based capsule network to detect
the driver’s distraction. IEEE Transactions on Intelli-
gent Transportation Systems.
Nareshkumar, R., Suseela, G., Nimala, K., and Niranjana,
G. (2023). Feasibility and necessity of affective com-
puting in emotion sensing of drivers for improved
road safety. In Principles and Applications of Socio-
Cognitive and Affective Computing, pages 94–115.
IGI Global.
Nidamanuri, J., Mukherjee, P., Assfalg, R., and Venkatara-
man, H. (2022). Dual-v-sense-net (dvn): Multisensor
recommendation engine for distraction analysis and
chaotic driving conditions. IEEE Sensors Journal,
22(15):15353–15364.
Qin, B., Qian, J., Xin, Y., Liu, B., and Dong, Y. (2021).
Distracted driver detection based on a cnn with de-
creasing filter size. IEEE Transactions on Intelligent
Transportation Systems, 23(7):6922–6933.
Seong, J., Lee, C., and Han, D. S. (2022). Neural architec-
ture search for real-time driver behavior recognition.
In (ICAIIC), pages 104–108. IEEE.
Shahverdy, M., Fathy, M., Berangi, R., and Sabokrou, M.
(2020). Driver behavior detection and classification
using deep convolutional neural networks. Expert Sys-
tems with Applications, 149:113240.
Towards Efficient Driver Distraction Detection with DARTS-Optimized Lightweight Models
487

Wang, H., Chen, J., Huang, Z., Li, B., Lv, J., Xi, J., Wu, B.,
Zhang, J., and Wu, Z. (2022a). Fpt: fine-grained de-
tection of driver distraction based on the feature pyra-
mid vision transformer. IEEE transactions on intelli-
gent transportation systems, 24(2):1594–1608.
Wang, J. and Wu, Z. (2023). Driver distraction detection
via multi-scale domain adaptation network. IET Intel-
ligent Transport Systems.
Wang, J., Wu, Z., et al. (2022b). Model lightweighting for
real-time distraction detection on resource-limited de-
vices. Computational Intelligence and Neuroscience,
2022.
Xing, Y., Lv, C., Cao, D., and Hang, P. (2021). To-
ward human-vehicle collaboration: Review and per-
spectives on human-centered collaborative automated
driving. Transportation research part C: emerging
technologies, 128:103199.
Zaman, K., Sun, Z., Shah, S. M., Shoaib, M., Pei, L.,
and Hussain, A. (2022). Driver emotions recognition
based on improved faster r-cnn and neural architec-
tural search network. Symmetry, 14(4):687.
Zeng, X., Wang, F., Wang, B., Wu, C., Liu, K. J. R., and Au,
O. C. (2022). In-vehicle sensing for smart cars. IEEE
Open Journal of Vehicular Technology, 3:221–242.
Zepf, S., Hernandez, J., Schmitt, A., Minker, W., and Pi-
card, R. W. (2020). Driver emotion recognition for
intelligent vehicles: A survey. ACM Computing Sur-
veys (CSUR), 53(3):1–30.
Zhu, Z., Wang, S., Gu, S., Li, Y., Li, J., Shuai, L.,
and Qi, G. (2023). Driver distraction detection
based on lightweight networks and tiny object de-
tection. Mathematical Biosciences and Engineering,
20(10):18248–18266.
EAA 2024 - Special Session on Emotions and Affective Agents
488
