
Towards a Definition of Awareness for Embodied AI
Giulio Antonio Abbo
1 a
, Serena Marchesi
2 b
, Kinga Ciupinska
2 c
, Agnieszka Wykowska
2 d
and Tony Belpaeme
1 e
1
IDLab-AIRO, Ghent University, imec, Belgium
2
Social Cognition in Human-Robot Interaction (S4HRI), Italian Institute of Technology, Genova, Italy
Keywords:
Awareness, Artificial Intelligence, Embodied AI.
Abstract:
This paper explores the concept of awareness in the context of embodied artificial intelligence (AI), aiming to
provide a practical definition and understanding of this multifaceted term. Acknowledging the diverse inter-
pretations of awareness in various disciplines, the paper focuses specifically on the application of awareness
in embodied AI systems. We introduce six foundational elements as essential building blocks for an aware
embodied AI. These elements include access to information, information integration, attention, coherence, ex-
plainability, and action. The interconnected and interdependent nature of these building blocks is emphasised,
forming a minimal base for constructing AI systems with heightened awareness. The paper aims to spark a
dialogue within the research community, inviting diverse perspectives to contribute to the evolving discipline
of awareness in embodied AI. The proposed insights provide a starting point for further empirical studies and
validations in real-world AI applications.
1 INTRODUCTION
The concept of awareness does not allow itself to
be pinned down easily. Indeed, the term is found
across virtually any discipline, not rarely with differ-
ent meanings. Often it is used to describe voluntarily
directing one’s attention towards a certain aspect. In
other cases, it has a specific and circumscribed mean-
ing, seldom familiar to the uninitiated outside a par-
ticular field.
In philosophy, awareness pertains to conscious-
ness and self-awareness, with philosophers investi-
gating how mental states interconnect with physical
processes in the mind-body problem (Fodor, 1981).
Psychology finds it closely linked to consciousness
and delves into different levels of awareness, ranging
from the conscious to the subconscious and uncon-
scious. Neuroscience sheds light on the neural corre-
lates of awareness, studying brain activity associated
with conscious experiences. Researchers in neuro-
science also explore altered states of consciousness,
a
https://orcid.org/0000-0001-6301-0028
b
https://orcid.org/0000-0001-9931-156X
c
https://orcid.org/0000-0002-9909-4400
d
https://orcid.org/0000-0003-3323-7357
e
https://orcid.org/0000-0001-5207-7745
such as sleep, meditation, and drug-induced states, to
unravel the neural mechanisms underlying awareness.
In this turmoil of different definitions, a complete
reconciliation is unfeasible. Furthermore, each of
these definitions is dictated by the heterogeneity of
their applications. Thus, an unifying attempt would
be counterproductive and limiting, as it would lose
the necessary specificity and detail.
We will focus on awareness applied to the field
of artificial intelligence (AI). In particular, we will
discuss what awareness means when dealing with
embodied AI (Chrisley, 2003; Pfeifer and Bongard,
2006; Duan et al., 2022).
Using its body an AI system can explore its sur-
roundings using sensorimotor behaviour, implying
that embodied AI has a certain level of control – or
agency – over what it does in the environment. For
example, a social robot can use its camera feed to
interpret visual events near it and respond appropri-
ately, and in a multi-party conversation, the robot can
use a microphone array to distinguish between speak-
ers and provide insights into what was discussed.
The applications for embodied AI are countless and
we expect embodied AI to acquire even greater rel-
evance in our everyday lives, thanks to the advent of
Large Language Models (LLM) and specifically Mul-
timodal LLMs.
Abbo, G., Marchesi, S., Ciupinska, K., Wykowska, A. and Belpaeme, T.
Towards a Definition of Awareness for Embodied AI.
DOI: 10.5220/0012594800003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 3, pages 1399-1404
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
1399

Given the ever-changing dynamics of the social
and physical world, having access to sensor data is
not sufficient. Indeed, it is necessary to integrate the
information, enabling coherent interactions between
internal representation, and eventually the system and
the outside world. As a consequence of their in-
creased autonomy from human intervention, these al-
gorithms will necessarily have to show an advanced
level of something which might best be described as
“awareness”. A quality which allows a system to ex-
hibit optimal performance, enabling them to interact
efficiently with their social and physical environment
and respond contingently and quickly to dynamic sit-
uations.
Consider for instance a system operating in a so-
cial environment, where interaction with humans is
fundamental. This can be the check-in area of a busy
metropolitan hospital, with all the complexities asso-
ciated with it: from the noisy environment to the wide
range of cultures and ages. The system could take the
form of a robot in the future, but let us imagine for
now an interactive kiosk. Currently, where kiosks are
available, they show an interface that hustles the pa-
tients through the initial part of the check-in proce-
dure. This experience is often not pleasant, especially
the first time around, and would greatly benefit from
a more human-centric approach. The system could
be empowered with an AI to facilitate a smoother and
more user-friendly check-in process, for example by
being aware of the patient’s emotions. This goes be-
yond the simple detection of a smile, as it involves es-
tablishing a common ground and complex topics such
as the Theory of Mind (Frith and Frith, 2005). The re-
sult would be an enhanced and more humanised form
of interaction, which is fundamental in delicate sce-
narios, such as the one presented.
In this paper, we identify and discuss six build-
ing blocks of an aware embodied AI, showing how
each of them is necessary and providing an illustra-
tive application. Then, we suggest how the items pre-
sented are connected and interdependent, before mov-
ing to propose a definition of awareness in this field.
While our definition is a working definition, this pa-
per contributes to the discourse on awareness and con-
sciousness in AI by offering new thoughts and per-
spectives, thereby enriching the ongoing exploration
in this field.
2 BACKGROUND
2.1 Consiusness, Awareness,
Self-Awareness
Dehaene et al. (Dehaene et al., 2017) identify two
levels of consciousness: Global Availability and Self-
Monitoring. The first represents consciousness in its
transitive meaning as in being conscious of X, the in-
formation becomes globally available to the rest of
the system for further processing. Fundamental at
this level is the mental representation of the object
of thought and the ability to report about it verbally
and non-verbally. The psychological definition of at-
tention (James, 1890) overlaps with the concept of
global availability if we exclude the previous stages
of involuntary attentional selection. The second level
identifies the reflexive meaning of consciousness, in
the sense of self-monitoring, introspection, or meta-
cognition. Confidence, reflection, meta-memory and
reality monitoring are all aspects related to this level
of consciousness or self-awareness. Importantly, the
two levels are orthogonal as one can exist without the
other.
In their position paper, Dehaene et al. state that a
machine endowed with these two capabilities would
behave as if conscious. However, a holistic imple-
mentation in which the system becomes aware of ev-
erything is currently technologically unfeasible. For a
concrete application of the definition, we find it nec-
essary to always specify the object of the awareness.
We will thus refer to awareness of something: e.g.,
awareness of the self (self-aware), awareness of the
context, awareness of our capabilities, and so on. This
limitation, in which a system is aware only of a few
aspects, carefully avoids any conscious-mimicking
behaviour.
2.2 Embodied AI
“Embodied AI is about incorporating traditional in-
telligence concepts from vision, language, and rea-
soning into an artificial embodiment” (Duan et al.,
2022). Conventional AI leverages the vast amounts of
data available on the internet from text, to multimedia
elements, to the most diverse datasets. On the other
hand, embodied AI integrates physical interaction and
sensorimotor capabilities into artificial agents. The
physical presence of embodied AI needs to be re-
flected in its training data. For this reason, egocen-
tric (first-person) perception plays a central role in
this field. First-person data consists of videos and im-
ages taken from the point of view of the agent, in this
case, the embodied system. With this new kind of
AWAI 2024 - Special Session on AI with Awareness Inside
1400

data, it is possible to tackle new and exciting prob-
lems (Grauman et al., 2022): indexing past experi-
ences, analysing present interactions, and anticipating
future activity.
Chella et al. set to achieve awareness – specifi-
cally, self-awareness – through inner speech (Chella
et al., 2020). Inner speech can take many forms: it
can consist of just a few words or full sentences, and
it can be a monologue or a dialogue, in the case one
asks questions and answers them using both “I” and
“You”. This process is involved in self-regulation,
language functions such as writing and reading, re-
membering the goals of action, task-switching per-
formances, Theory of Mind, and self-awareness. The
system makes use of perception and action modules, it
includes proprioception of emotions, beliefs, desires,
intentions and body as well as exteroception. Actu-
ators include covert articulation and motor modules,
and everything is enabled by a set of memory modules
(Chella and Pipitone, 2020). We choose to focus on
the indispensable ingredients of awareness, since we
are not set to achieve true consciousness. This means
that several aspects, such as believes and desires – but
also goals – are not considered in our work.
3 ELEMENTS FOR AWARENESS
What are the building blocks for an aware embodied
AI? Which processes, structures and properties are
required for an aware behaviour when dealing with
the external world? In this section, we introduce six
requisites: access to information, information integra-
tion, attention, coherence, explainability, and action.
We purposefully will not cover those aspects that are
secondary nice-to-haves but do not constitute a mini-
mal base for awareness.
3.1 Access to Information
For a system to be aware of X, it must have access
to X . While this statement may seem self-evident,
we want to stress that access, in this context, extends
beyond mere availability. It encompasses the system’s
ability to effectively retrieve and process information
from the outside of the system and from other system
components, such as a memory (Wood et al., 2012).
Access to crucial information might be challeng-
ing in scenarios where an embodied AI system oper-
ates with restricted sensor capabilities or obstructed
lines of sight. Consider a robot navigating a cluttered
and dimly lit space. If its visual sensors are obstructed
or limited, the system’s access to visual cues, such as
identifying obstacles or determining the layout of the
environment, is compromised, and so is its awareness
of the surroundings.
On the other hand, in a properly designed system,
an embodied AI system can showcase effective access
to information. For instance, in an autonomous ve-
hicle equipped with advanced cameras, LiDAR, and
radar systems, the system gains access to a rich set of
data about its surroundings. At any time, the system
has access to the data, and if one of these sensors fails,
the system maintains awareness thanks to the redun-
dancy of its senses.
3.2 Information Integration
For a system to exhibit awareness of X , the integra-
tion of all data about X is essential. Integration goes
beyond access as it involves putting together and syn-
thesising information into a unified and meaningful
representation.
Without access to the visual information, the robot
in the example previously discussed finds itself lost in
the environment. Having an alternative data source,
such as a sonar, would alleviate the problem. How-
ever, the new system is susceptible to a new issue:
the two sensors could provide contrasting data. If
the robot fails to merge and integrate the information
available into a coherent model of the environment,
then it will not find itself in a better position than in
the initial situation.
Similarly, the aforementioned robot has access to
a diverse range of data sources about its surroundings.
However, it needs to maintain a coherent model of
the situation, to be aware of it. The integration of
these diverse data sources empowers the AI system to
navigate safely, showcasing a high level of awareness
of its surroundings.
3.3 Attention
Attention is a key component of awareness – or con-
sciousness, depending on the discipline that is being
considered. According to Taylor (Taylor, 2007), at-
tention is the consciousness of a stimulus. It allows
focusing on the most salient aspects while ignoring
other distractors. Real-time processing is fundamen-
tal for maintaining awareness, and attention is one of
the means to reduce the computational load of the sys-
tem.
Trivially, any system with a sound design displays
a certain form of architectural attention. Imagine a
self-driving car: the system in charge of maintaining
awareness of the surroundings will not receive data on
which radio station is playing, by design. However,
this is hardly a proper attention mechanism, as it boils
Towards a Definition of Awareness for Embodied AI
1401
down to simply not having access to irrelevant data.
Instead, attention is about filtering out a part of
the data, and the focus of attention can be limited to
a handful of aspects at one time. Paying attention to
a car several hundred meters behind while driving at
high speed is not necessary, as the car’s resources are
better employed to detect obstacles in front of the ve-
hicle. Nonetheless, the data about the car is still ac-
cessible, and the attention should be shifted towards
it if, for instance, it turned on the police light bars
signalling to make way.
3.4 Coherence
For embodied AI to demonstrate awareness of X , it
must exhibit coherence in the decision-making asso-
ciated with it. This involves maintaining consistency,
both during the task at hand and over time.
To showcase awareness, the AI system must ex-
hibit coherence with its own decision history. Mem-
ory, or by extension an internal model, is vital for
this process. An embodied AI should maintain an ac-
cessible record of past decisions and outcomes, and
produce consistent responses across similar scenarios,
demonstrating the system’s ability to apply past expe-
riences to comparable situations. As a consequence,
the system could be made able to learn from previous
mistakes and predict the outcome of its actions.
In the same way, the system should be stable in its
decisions during the execution of a task. It is expected
that an autonomous car will suddenly reduce its speed
when it detects an unforeseen obstacle. However, in
a normal situation, the car is expected to maintain a
constant speed showing awareness of the obstacles on
the way.
3.5 Explainability
In the context of embodied AI awareness, explainabil-
ity is a safeguard for safety and a means to account-
ability. The system must not only be aware of (X) but
also capable of elucidating its understanding and de-
cisions regarding X. The explanation can be in any
form, such as the English language or a diagram. It
has however to be factual, representing the real mo-
tivations for a certain behaviour. Indeed, post-fact
reasoning about the events that happened and why,
which any Large Language Model certainly enables,
does not add to the safety nor the accountability of the
system.
It is easy to see how a factual explanation of why
a self-driving car chose a specific course of action
is essential for passengers, regulators, and other road
users. For instance, in situations where the car over-
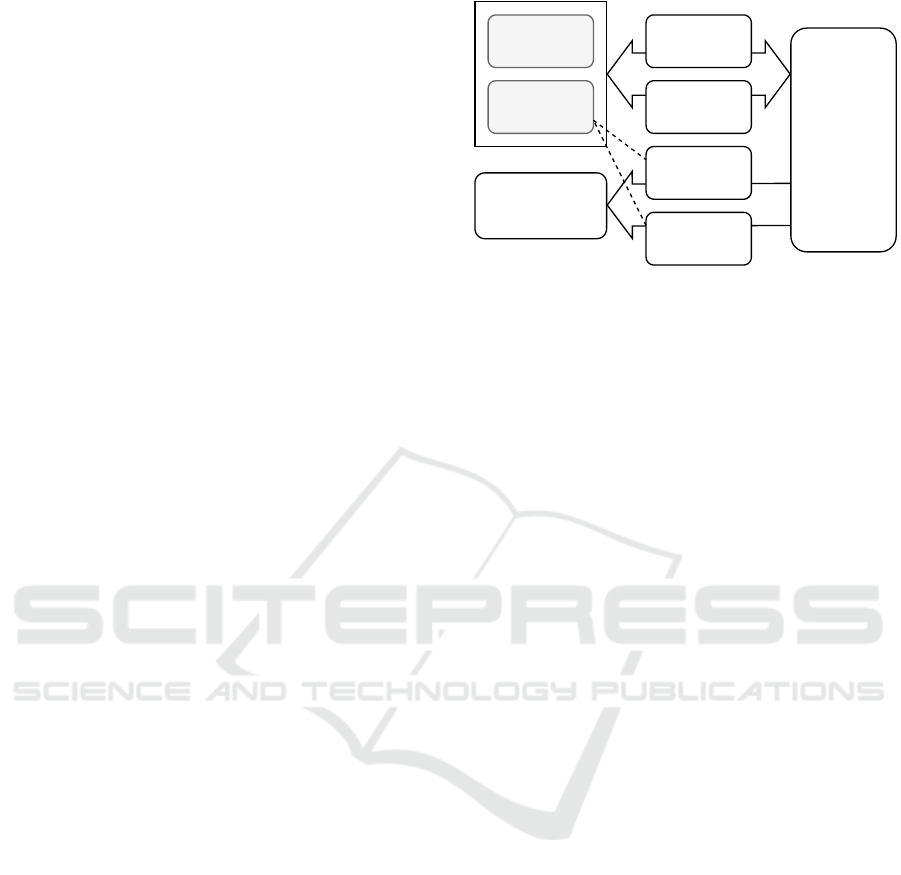
Access
Data
Availability
Information
Integration
Memory
Coherence
Explainability
Attention
Action
Figure 1: This diagram shows the relations between the
awareness requirements presented.
rides human input or faces ambiguous road condi-
tions, clear explanations ensure accountability and ad-
herence to legal and ethical standards. While this as-
pect might appear as secondary, only a truly aware
system can provide such an explanation.
3.6 Action
An integral aspect of embodied AI is the interac-
tion with the external environment. Being aware of
a certain aspect (X) should be followed by a possible
change of the internal behaviour or an intervention in
the environment to bring about a desired change.
Consider an autonomous vehicle navigating a
busy urban area. The system being aware of its sur-
roundings is useless unless it can also modify its tra-
jectory and speed to avoid obstacles, ensuring the
safety of both passengers and others on the road. In-
tervening on the system’s behaviour is not the only
way to effect change: indeed, a system can also in-
tervene in the external environment. For example, a
smart building management system may adjust light-
ing and temperature based on occupancy patterns, to
enhance energy efficiency and user comfort.
Without the ability for a behaviour change, reac-
tive or proactive, the system’s utility diminishes. In-
deed, true awareness of a situation encompasses not
just perceiving and understanding it but also adapting
and responding effectively to its dynamics.
4 AWARENESS FOR EMBODIED
AI
The requirements presented depend strongly on each
other as shown in Figure 1. Access to internal and
external information forms the foundational layer, al-
lowing the system to perceive and collect data about
its environment and have a memory. This information
AWAI 2024 - Special Session on AI with Awareness Inside
1402

is then subjected to information integration, where the
system combines and synthesises data into a cohesive
representation. Without access, the information inte-
gration process would have to rely passively on the
data streaming from the environment. Attention acts
as a dynamic filter, directing the system to focus on
relevant aspects and optimising real-time processing.
Action completes the loop, as the system, thanks
to the information integration, can dynamically inter-
act with and influence its surroundings. Ensuring that
the system’s decisions and actions align with its un-
derstanding, and maintaining coherence over time is
fundamental for successful and reliable interactions.
Explainability serves as a critical component, de-
manding that the system accurately justifies its deci-
sions, fostering transparency and accountability. Both
these last functionalities require access, specifically to
the memory of previous experiences.
Considering everything presented so far, we pro-
pose to call a system aware of X if:
• it has access to information about X , in the form of
data availability, memory recall and forward mod-
elling;
• it displays an attention mechanism towards X, fil-
tering out distractors;
• it can successfully integrate available information
into a model of X;
• it can act in response to X, changing its behaviour
or intervening on the environment;
• it displays coherence in its decisions about X, with
respect to its current and previous actions;
• it is explainable in its decisions about X, using
verifiable data to justify them.
If the first measures are evidently necessary for a
working system, it can be debated that action and ex-
plainability do not play a fundamental role. However,
we argue that all the aspects presented are equally im-
portant for aware embodied AI.
In particular, the action is what distinguishes the
aware system from a passive observer. Consider for
instance a human without any motor capability: even
without a possibility to change the state of the world
that surrounds him, this subject is clearly still aware,
as long as he can change his ideas and thoughts in
response to external stimuli. However, if we know for
certain that this is not the case, we would say that the
subject is no longer aware.
On the other hand, a system that can interact with
the external world – thus possessing the action re-
quirement – but cannot explain the motivation behind
its actions, cannot be defined as truly aware as it lacks
the crucial element of transparency. Explainability
serves as the bridge between the system’s internal pro-
cesses and its external behaviour. Without the ability
to articulate the reasons behind its actions, the system
remains inscrutable, hindering our understanding and
trust in its cognitive processes.
A relevant note is to be made, that in this work
we borrowed the term awareness from studies revolv-
ing around humans, and we applied it to the world of
machines. This was permitted by the similarities be-
tween the behaviour of an aware AI with the results
of similar mechanisms taking place in humans and
has nonetheless been done before (Drury et al., 2003;
Holland, 2004; Schipper, 2014, just to cite a few).
We want to underline that the scope of this definition
is embodied AI, and it is not our intention to define
awareness for humans and living creatures. We inten-
tionally chose awareness to underline that what we
want to achieve is a subset of consciousness, which
remains a trait of mankind alone.
5 CONCLUSION
This paper initiates a conversation on practical strate-
gies for enhancing awareness in embodied AI sys-
tems. We introduce six key elements as its founda-
tions: access to information, information integration,
attention, coherence, explainability, and action. Em-
phasising their interconnected and interdependent na-
ture, we argue that these elements form a minimal
base for constructing systems with heightened aware-
ness.
While the proposed definition takes a practical ap-
proach to the topic, it’s important to note that there
is currently limited empirical evidence supporting it.
The contribution underscores the need for future stud-
ies to validate and refine these insights, ensuring their
effective implementation in real-world AI applica-
tions.
This contribution aims to spark a dialogue within
the research community, fostering a dynamic ex-
change of ideas and perspectives. Our work aims not
just to set a stage but to open a dialogue, inviting di-
verse voices to contribute to the evolving discipline of
awareness in embodied AI.
ACKNOWLEDGEMENTS
Funded by the Horizon Europe VALAWAI project
(grant agreement number 101070930).
Towards a Definition of Awareness for Embodied AI
1403

REFERENCES
Chella, A. and Pipitone, A. (2020). A cognitive architec-
ture for inner speech. Cognitive Systems Research,
59:287–292.
Chella, A., Pipitone, A., Morin, A., and Racy, F. (2020). De-
veloping Self-Awareness in Robots via Inner Speech.
Frontiers in Robotics and AI, 7.
Chrisley, R. (2003). Embodied artificial intelligence. Arti-
ficial intelligence, 149(1):131–150.
Dehaene, S., Lau, H., and Kouider, S. (2017). What is
consciousness, and could machines have it? Science,
358(6362):486–492.
Drury, J., Scholtz, J., and Yanco, H. (2003). Aware-
ness in human-robot interactions. In SMC’03 Con-
ference Proceedings. 2003 IEEE International Con-
ference on Systems, Man and Cybernetics. Confer-
ence Theme - System Security and Assurance (Cat.
No.03CH37483), volume 1, pages 912–918 vol.1.
Duan, J., Yu, S., Tan, H. L., Zhu, H., and Tan, C. (2022).
A Survey of Embodied AI: From Simulators to Re-
search Tasks. IEEE Transactions on Emerging Topics
in Computational Intelligence, 6(2):230–244.
Fodor, J. A. (1981). The mind-body problem. Scientific
american, 244(1):114–123.
Frith, C. and Frith, U. (2005). Theory of mind. Current
biology, 15(17):R644–R645.
Grauman, K., Westbury, A., Byrne, E., Chavis, Z., Furnari,
A., Girdhar, R., Hamburger, J., Jiang, H., Liu, M., Liu,
X., Martin, M., Nagarajan, T., Radosavovic, I., Ra-
makrishnan, S. K., Ryan, F., Sharma, J., Wray, M.,
Xu, M., Xu, E. Z., Zhao, C., Bansal, S., Batra, D.,
Cartillier, V., Crane, S., Do, T., Doulaty, M., Erapalli,
A., Feichtenhofer, C., Fragomeni, A., Fu, Q., Gebre-
selasie, A., Gonz
´
alez, C., Hillis, J., Huang, X., Huang,
Y., Jia, W., Khoo, W., Kol
´
a
˘
ı, J., Kottur, S., Kumar, A.,
Landini, F., Li, C., Li, Y., Li, Z., Mangalam, K., Mod-
hugu, R., Munro, J., Murrell, T., Nishiyasu, T., Price,
W., Puentes, P. R., Ramazanova, M., Sari, L., Soma-
sundaram, K., Southerland, A., Sugano, Y., Tao, R.,
Vo, M., Wang, Y., Wu, X., Yagi, T., Zhao, Z., Zhu,
Y., Arbel
´
aez, P., Crandall, D., Damen, D., Farinella,
G. M., Fuegen, C., Ghanem, B., Ithapu, V. K., Jawa-
har, C. V., Joo, H., Kitani, K., Li, H., Newcombe, R.,
Oliva, A., Park, H. S., Rehg, J. M., Sato, Y., Shi, J.,
Shou, M. Z., Torralba, A., Torresani, L., Yan, M., and
Malik, J. (2022). Ego4D: Around the World in 3,000
Hours of Egocentric Video. In 2022 IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 18973–18990.
Holland, O. (2004). The Future of Embodied Artificial
Intelligence: Machine Consciousness? In Iida, F.,
Pfeifer, R., Steels, L., and Kuniyoshi, Y., editors, Em-
bodied Artificial Intelligence: International Seminar,
Dagstuhl Castle, Germany, July 7-11, 2003. Revised
Papers, Lecture Notes in Computer Science, pages
37–53. Springer, Berlin, Heidelberg.
James, W. (1890). The principles of psychology, vol. 1.
henry holt and co. New York.
Pfeifer, R. and Bongard, J. (2006). How the body shapes the
way we think: a new view of intelligence. MIT press.
Schipper, B. C. (2014). Awareness. Available at SSRN
2401352.
Taylor, J. G. (2007). Through machine attention to machine
consciousness. In Chella, A. and Manzotti, R., ed-
itors, Artificial Consciousness, pages 24–47. Imprint
Academic.
Wood, R., Baxter, P., and Belpaeme, T. (2012). A review of
long-term memory in natural and synthetic systems.
Adaptive Behavior, 20(2):81–103.
AWAI 2024 - Special Session on AI with Awareness Inside
1404
