
Associating Endpoint Accuracy and Similarity of Muscle Synergies
Liming Cai
1,2 a
, Shuhao Yan
2,3
, Chuanyun Ouyang
2,3
, Tianxiang Zhang
2,3
, Jun Zhu
1 b
, Li Chen
1,4,∗
and Hui Liu
5,∗ c
1
Academy for Engineering&Technology, Fudan University, Shanghai, 200433, China
2
Suzhou Institute of Biomedical Engineering and Technology Chinese Academy of Sciences, Jiangsu,215163, China
3
School of Biomedical Engineering (Suzhou), Division of Life Sciences and Medicine University of Science and Technology
of China, Suzhou, China
4
Department of Orthopedics, Huashan Hospital, Fudan University, Shanghai, China
5
Cognitive Systems Lab, University of Bremen, Bremen, Germany
∗ ∗
Keywords:
Muscle Synergy Extraction, Muscle Synergy Similarity, Accuracy, Manipulate, Electromyography, EMG,
sEMG.
Abstract:
Recently, extracting the muscle synergy from surface electromyographic (sEMG) signals has become a stan-
dard method for evaluating motor control strategies during exercise. The synergy of the upper extremity in
various stretch and reach tasks has been described in many studies, but few of them have analyzed the relation-
ship between task performance and muscle synergy. This study provides an experimental device and analysis
method for muscle coordination in the joystick task for the specific action of the pilots’ joystick manipulation.
Eight healthy subjects performed the joystick manipulation. For upper limbs, the task content included iso-
tonic tasks with three load levels and recorded ten muscles’ EMG and acceleration information. The muscle
synergy effect was extracted and the correlation between muscle synergy similarity and manipulation per-
formance and interaction load was studied. The experiment data showed that the manipulation performance
varied under different loading conditions, but did not show significant changes in synergistic muscle structure.
We found significant correlations between the similarity of some synergistic muscle structures and manipula-
tion performance. However, between single-action performance and the average of their likeness, there was
no strong correlation. Through the analysis of muscle synergy, we can determine that there is a fixed muscle
synergy pattern during rocker manipulation, of which the structure is independent of the rocker load level,
and muscle synergy similarity was negatively correlated with manipulation performance. The findings of this
study significantly contribute to enhancing the ergonomic design of the flight stick, offering specific insights
for its optimization. Additionally, they pave the way for developing specialized muscle training techniques,
which are tailored to augment the accuracy and precision of executing complex flight maneuvers.
1 INTRODUCTION
Fine manipulation is one of the basic abilities of pi-
lots, and it is a necessary and preferred ability in the
selection and training process (Franklin et al., 2003).
Fine manipulation refers to the power of the phys-
iological reflex conducted by the optic nerve to re-
flect on the action quickly. The visual system uses
the reflection and conduction of many visual func-
tions to input the information obtained from observ-
a
https://orcid.org/0000-0003-2952-0109
b
https://orcid.org/0000-0003-1311-4333
c
https://orcid.org/0000-0002-6850-9570
∗
Correspondence E-mails
ing the surrounding environment into the center of the
brain. Then it transmits and drives the neuromuscu-
loskeletal motor system and reflects it in the center of
the brain on delicate movements of the hands or feet
(Sepehrikia et al., 2023). The joystick manipulation
is one of the main contents of the flight action; ma-
nipulation’s accuracy and stability are essential.
The joystick manipulation is a multi-joint-
coordinated movement. In motion control of the hu-
man body, the corresponding control modes are nu-
merous for multi-joint motion. Actions are inher-
ently variable, and professional athletes can use repe-
tition to make them as consistent as possible. Mus-
cle synergy has been used to study complex motor
control patterns in recent years. Numerous studies
Cai, L., Yan, S., Ouyang, C., Zhang, T., Zhu, J., Chen, L. and Liu, H.
Associating Endpoint Accuracy and Similarity of Muscle Synergies.
DOI: 10.5220/0012586800003657
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 17th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2024) - Volume 1, pages 683-694
ISBN: 978-989-758-688-0; ISSN: 2184-4305
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
683

have indicated that the CNS generates motor com-
mands through synergistic combinations of muscles
(d’Avella and Bizzi, 2003; Bizzi et al., 2008; Bizzi
and Cheung, 2013), which is called muscle synergy.
Applications of muscle synergy triggers studying the
effects of nerve damage (Tang et al., 2017; Roh
et al., 2013), human posture control (Torres-Oviedo
and Ting, 2007; Robert and Latash, 2008; Asaka
et al., 2011), robot-assisted technology (Miyazaki,
2011; Salman et al., 2010; C et al., 2021; Wang et al.,
2021), and locomotion (A et al., 2019).
In isometric tasks, against speed changes, the
module structures of muscle synergies were robust;
the neural commands to muscle synergies changed in
response to speed changes (Kojima et al., 2017). The
motor control strategy might be modified depending
on the requirement of the accuracy of the isometric
reaching task considered (Tsubasa et al., 2020; Et-
tema et al., 2005). In the isotonic contraction task,
previous studies have shown that the CNS could ac-
quire knowledge between stiff-ness level and size of
targets in some way (Osu et al., 2004; Sangwan et al.,
2015), and change the mechanical impedance of the
human body through the simultaneous activation of
antagonist muscle groups (Burdet et al., 2001; Feld-
man and Levin, 1995), which reveals the critical role
of co-contraction in upper limbs accuracy movement.
In addition to co-contraction indices, inter- and
intra-subject similarity have previously been a hotspot
in motor coordination (Alnajjar, 2017; Barnamehei
et al., 2018a; Esmaeili and Maleki, 2020). Stud-
ies have shown that expertise did not cause signifi-
cant differences in muscle synergy in controlled ex-
periments between elites and non-elites (Barnamehei
et al., 2018b). Although many studies support the
similarity of synergistic components between differ-
ent subjects under task conditions (K et al., 2021;
Choi et al., 2019; Curado et al., 2015; Taborri et al.,
2017; Velden et al., 2022), only a few studies have
compared the relationship between intra-subject sim-
ilarity and motion accuracy under different conditions
(Choi et al., 2019). In comprehensive studies, the re-
searchers have not assessed the within-subject vari-
ability in detail, and data are often averaged across
trials to obtain average patterns without detailed anal-
ysis of individual manipulations (A et al., 2019; Zhao
et al., 2019; Mira et al., 2021).
The extraction of muscle synergy holds great po-
tential for enhancing fine motor skills. In this context,
this study explores an objective and effective method
to investigate the relationship between muscle syn-
ergy similarity, manipulation performance, and inter-
action load. Specifically, the study designs isotonic
manipulation tasks with three different load levels.
From these tasks, muscle synergy structure and sim-
ilarity are extracted from sEMG data. Subsequently,
the manipulation performance, muscle synergy struc-
ture, and their likeness are thoroughly analyzed and
compared. Finally, the study delves into the relation-
ship between manipulation performance and muscle
synergy, offering insights into their interplay.
2 MATERIALS AND METHODS
2.1 Subjects and Experimental
Apparatus
In this study, a sample population of 8 healthy sub-
jects (all males, ages from 22 to 24, with heights of
170 ± 5 cm, and weighted 68 ± 5kg) volunteered to
participate. The experiment procedure was informed
to the subjects.
The joystick manipulation experimental apparatus
was self-developed by the project team. As shown
in Figure 1, it can realize the X and Y direction joy-
stick manipulation and record the space position of
the stick in real-time through the data from the en-
coder all of the subjects manipulated the experimental
apparatus according to the upper computer interface,
as shown in Figure 2A, and after completing the prac-
tical record of a single task, the description is shown
in Figure 2B.
2.2 Three Tasks
Joystick manipulation was usually done by coordinat-
ing the shoulder, elbow, wrist, and fingers. This study
designed the reciprocating motion under three loading
conditions( Figure 2B). The study performed internal
rotation and external rotation during the experiment.
At the same time, the elbow joint was flexed and ex-
tended on the sagittal plane and retracted on the coro-
nal plane. For the convenience of discussion, the en-
tire experimental action was described by supination
and pronation.
The subjects carried out simple manipulation
learning under guidance before the start of the tests.
All issues were asked to sit upright on a chair through-
out the investigation. The issues held the joystick and
moved back and forth along the X-axis ( Figure 2A).
The joystick moved to the right along +X, and the blue
ball rolled to the B circle synchronously Figure 2B).
The initial position of the blue ball was in the mid-
dle. Meanwhile, The black circle (diameter 2cm) was
symmetrical on both sides of the blue ball. The joy-
stick load was set to 3 levels (task 1, drag torque 0.72
BIOSIGNALS 2024 - 17th International Conference on Bio-inspired Systems and Signal Processing
684

Nm; task 2, drag torque 2.16 Nm; task 3, drag torque
6 Nm).
The subjects were required to 1) keep a distance
between the elbows and the thighs, 2) exert force on
the upper limbs, 3) blue balls reciprocate between the
black circles, and 4) speed up while giving priority to
accuracy.
Operating Procedures. Each set of 16 reps, then rest
for 5 minutes before doing the next set. In this way,
there were 24 sets of trials, and each set of trials con-
tained 16 cyclic actions.
Data Induction. There were 24 clusters of experi-
ments for eight subjects, each completed three tasks.
The data includes the manipulation accuracy of the
left and right positions and the similarity of the mus-
cle synergy.
2.3 EMG Data Acquisition
Manipulation performance was recorded by the self-
made joystick manipulation experimental prototype
(position sampling frequency: 200Hz). Meanwhile,
while subjects performed the movement tasks, A sur-
face EMG system (Diese Trigno, USA DELSYS.
Inc)was used to measure EMG and acceleration from
10 muscles of the upper arm ( Figure 1A) includ-
ing brachioradialis (BRAD), the short head of biceps
(BICS), long head of biceps (BICL), anterior deltoid
(DA), long head of triceps (TRIL), lateral head of
triceps (TRILA), pectoralis major (PM), infraspina-
tus (INF), teres minor (T.M.), and posterior deltoid
(D.P.). Electrodes are shown in Figure 1B/C, and the
placement of electrodes follows the guidelines of sur-
face EMG (Hermens et al., 2000). The sampling fre-
quency of surface EMG is 1249Hz, and the sampling
frequency of acceleration is 149Hz. The acquired sig-
Figure 1: Placement and sensing muscles of sEMG sensors.
Top right: self-adhesive electrodes. BRAD: brachioradi-
alis; BICS: the short head of biceps; BICL: the long head of
biceps; PM: pectoralis major; DA: anterior deltoid; TRIP:
the long head of triceps; TRILA: the lateral head of triceps;
INF: infraspinatus; T.M.: teres minor; D.P.: posterior del-
toid (Cai et al., 2023b).
nals were recorded and imported into Matlab 2017
(The Mathworks, Natick, MA) to be processed by
means of custom routines.
2.4 Manipulation Performance Data
The data of manipulation was derived from the motor
encoder( Figure 2C), which was pre-processed in the
following way:
a. Perform absolute value and normalization process-
ing on the original data in order to detect the setting
of the threshold;
b. Perform median filtering on the data obtained in
(a) to filter out noise (abnormal burr) interference;
c. Analyze the data, set the detection threshold, obtain
the position index of the data more significant than
this threshold, and take the maximum and minimum
value of the position index to obtain 4: the start and
end position indexes of the valid data segment.
d. Calculate and obtain valid data in the original data
according to the detection results in (c), and calculate
the mean and variance.
e. Quantification of Manipulation Performance:
Positon deviation (P.D.): the difference between the
mean of all data and the value of the ideal position.
Positon accuracy (P.A.): the difference between the
value of the actual and the ideal position
Positon repeatability (P.R.): variance of all actual
values.
Positon stability (P.E.): inferior for all manipulation
data.
2.5 Muscle Synergies Extraction and
Analysis
2.5.1 EMG Preprocessing
The custom routines were used for the sEMG Pre-
processing in Matlab. The EMG pretreatment was in
the following way:
a. Removes drifts: A mean shift was used to elimi-
nate baseline shifts caused by trial or subject electrode
shifts.
b. Band-pass (B.P.): filtering (40-250Hz), Removing
high-frequency noise and motion artifacts.
c. Notch: 50Hz, 150Hz notch, removed fixed fre-
quency noise.
d. Rectification: it is a standard method used for an
envelope of non-negative sEMG signals
e. Low-pass (L.P.) filtering (20Hz), applied to the
rectified sEMG signals, Cutoff frequency of 0.5Hz
ensured smooth envelope and affected NMF results
(Kieliba et al., 2018; Ouyang et al., 2023).
f. Normalization: normalized by the maximum value
Associating Endpoint Accuracy and Similarity of Muscle Synergies
685
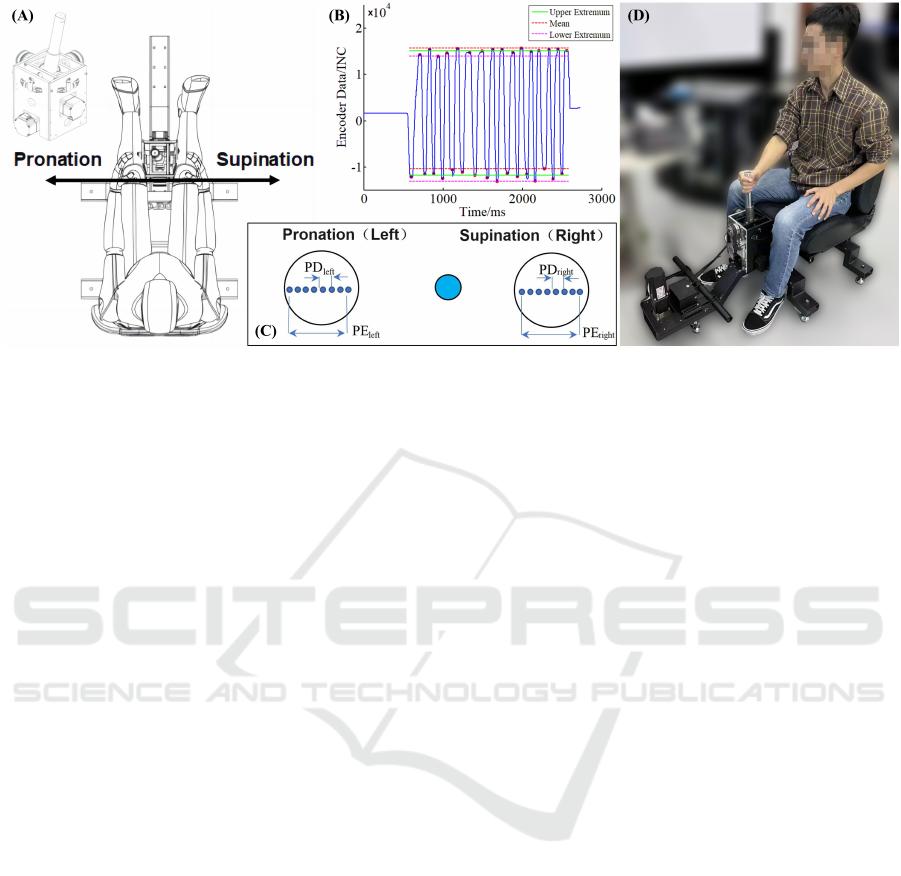
Figure 2: Self-developed experimental device and software interface. (A) Top view of the device for experiments; (B) A
screenshot of the software interface; (C) An exemplar result record. PD: position deviation; PE: extreme range of the position
(Cai et al., 2023b).
of the data itself during the trials.
g. Segmentation: The ACC signal was obtained syn-
chronously with the EMG signal, but the sampling
frequency of the ACC signal was lower than that of
the EMG signal, so the ACC signal should be interpo-
lated first to ensure that the length of the ACC signal
was consistent with the sEMG signal, after median
filtering the ACC signal was used to divide the EMG
signal. This paper extracted data from the first 14 cy-
cles, each containing one supination and one prona-
tion.
2.5.2 Extraction of Muscle Synergies
A Non-negative Matrix Factorization (NMF) algo-
rithm was employed to extract muscle synergies (Lee
and Seung, 1999). The pre-processed signal (V
m×t
,
where m represents the muscle channels and t denotes
time, was decomposed into two matrices: W
m×n
and
H
n×t
. Here, n is the number of extracted muscle syn-
ergies, W is the basis matrix representing muscle acti-
vation patterns, and H is the matrix of activation coef-
ficients for the muscle activations across m channels.
V
m×t
≈ W
m×n
× H
n×t
= W
1
× H
1
+W
2
× H
2
+ · · · +W
n
× H
n
(1)
W
i
is a vector from the Muscle synergy matrix, spec-
ifying the muscle activity pattern defined by mus-
cle synergy. Each element of W
i
was between 0 and
1 (Cai et al., 2023a). Muscle synergy formed by
these is functionally activated by the activation co-
efficient matrixH
i
. The activation coefficient repre-
sented the purported neural command from CNS, and
determined the relative contribution for establishing
the muscle synergy matrix (Torres-Oviedo and Ting,
2007; Cai et al., 2023c).
The number of muscle synergies n was between
1 and 10. The reconstructed matrix V
′
m×t
has been
expressed as (2). Then, the minimum number of syn-
ergies was selected that could adequately reconstruct
the pre-processed signals V
m×t
in all trials, as the vari-
ability accounted for (VAF shown in formula 3) >
90% in each muscle data vector (Tang et al., 2017).
V
′
m×t
= W
m×n
× H
n×t
VAF = 1 −
V
m×t
− V
′
m×t
2
/V
2
m×t
(2)
2.5.3 Quantitative Similarity of Muscle
Synergies
To determine the synergies’ similarity among the
tasks between the clusters, we used the intraclass cor-
relation coefficient (ICC) analysis (Choi et al., 2019;
Curado et al., 2015; Taborri et al., 2017; Velden et al.,
2022; McGraw and Wong, 1996), each subject per-
formed 14 round trips in a single task. First, indi-
vidual synergies from a single subject were collected
in one cluster. Then, we examined the similarity of
the synergies within the cluster by using the R
icc−wi
as formula (4), wi= [w
1
,w
2
,w
i
,..w
n
], wi is the synergy
matrices. In the formula (4), m represents the number
of trips which was 14, and i ranges from 1 to n.
R
icc−wi
= ICC (W
i1
,W
i2
,. ..,W
im
) (3)
In the single cluster, the likeness between two mus-
cle synergies matrices was assessed by r (Pear-
son’s correlation coefficients). Assume the num-
ber of trials was S for each subject, Sub ject 1
correlation coefficients were expressed as R
i−wi
=
[r
1
,r
2
,. . . r
i−1
,r
i+1
,. . . r
S
], with the ri has represented
the likeness of wi from the data of i-th trial and other
trials. Then the dispersion of all the averaged Ri
BIOSIGNALS 2024 - 17th International Conference on Bio-inspired Systems and Signal Processing
686

was analyzed using the quartile method (Tang et al.,
2017). After filtrating data, muscle synergies for each
subject R
task
were averaged.
R
i−wi
=
1
S − 1
S
∑
i=1
(r
1
.. . + r
i−1
+ r
i+1
+ r
s
)
R
task−wi
=
1
S
S
∑
i=1
(R
1−wi
+ R
2−wi
.. . + R
S−wi
)
(4)
2.5.4 Statistics Methods
This study’s descriptive statistics included the mean
and standard deviation of experiment data. One-way
ANOVA was used to evaluate between-cluster and
within-cluster R
icc−wi
/R
i
differences between differ-
ent loadings and subjects. Coefficients were consid-
ered significant for p < 0.1 and p < 0.05 in this study.
3 RESULTS
3.1 Muscle Synergy Analysis
Muscle synergies extracted from three tasks of 8
healthy subjects are shown in Figure 3. Four muscle
synergies were recruited in three tasks. W1 mainly
reflected the activation of BRAD, INF, and DA; W2
contained the activation of DA, PELA, TRILA, and
TRIL; W3 was mainly BICL and BICS; W4 was com-
posed of D.P., T.M., INF, TRIAL, TRAIL, BRAD.
When the load increased, the effect of INF decreased,
and the effect of A.D. increased in the synergy (W1).
As a small muscle group, BRAD was lowered in all
four synergistic modes as the load increased.
Within the cluster, a pronounced structure was
observed among the eight subjects. The average of
R
icc−wi
across all tasks and subjects was 0.87 ± 0.05
(R
icc−w2
= 0.97 ± 0.02, R
icc−w3
= 0.89 ± 0.09, R
icc−w4
= 0.96 ± 0.03), as shown in Figure 4. A one-way
analysis was conducted to evaluate the subjects and
tasks for R
icc−w1
. There was a significant differ-
ence in R
icc−w2
among different subjects (F = 3.674,
p = 0.015), and no statistical difference was found
in the level of R
icc−w1
, which is affected by different
tasks. The table 1 presents all the ICC results of mus-
cle synergies in all trials.
In the cluster, One-way analysis was used to as-
sess R
icc−w1
of the subjects and tasks of. There
was a significant difference in R
icc−w1
among differ-
ent subjects: R
icc−w1
(F = 10.754, p = 0); R
icc−w2
(F = 16.675, p = 0); R
icc−w3
(F = 43.418, p = 0);
R
icc−w4
(F = 25, p = 0), and statistical differences in
the level of R
icc−w1
(F = 5.903, p = 0.003) affected
by task.
3.2 Manipulation Accuracy Analysis
During pronation, six subjects exhibited smaller ma-
nipulation errors in task 2 compared to the other two
tasks. Furthermore, seven subjects had smaller ma-
nipulation errors in task 2 than in task 1, and the same
seven subjects had smaller errors in task 2 than in
task 3, as shown in Figure 5A. Regarding supination,
as depicted in Figure 5B, five subjects experienced
smaller manipulation errors in task 2 than in the other
two tasks, and five subjects had greater errors in task
1 compared to the other tasks.
The average similarity ri of a single trial in the
whole process was calculated. Meanwhile, the ri
with low similarity was proposed according to the
four-class classification method. According to this
method, the experimental results left by each subject
are shown in Figure 5 and Figure 6, during pronation,
there are seven subjects whose manipulation error of
task 2 was smaller than the other two tasks. During
supination, the manipulation error of task 2 with six
subjects was smaller than that of the other two tasks.
The number of the subjects with this characteristic
was higher than before the treatment.
One-way analysis was used in the cluster to as-
sess manipulation accuracy P.A.–L, P.A.–R. There
was a significant difference in P.A.–L among different
subjects (F = 3.374, p = 0.002), and different loads
(F = 5.143, p = 0.006).
3.3 Analysis of Correlation
Between the cluster, View Table 2, as shown in Figure
7 The correlation between P.D.–L and load is -0.29 (p
= 0.168), the r between P.D.–R and load is -0.41*(p
= 0.05), the r between P.R.–L and load is -0.3 (p =
0.15), the r between P.D.–R and load is -0.24 (p =
0.261), and r between P.E.–L and load is -0.32 (p =
0.12). The load correlation between the P.E.–R load
correlation is -0.27 (p = 0.2).
In the cluster, the relationship between the perfor-
mance of a single manipulation and ri (the similarity
of the muscle synergy from the single manipulation)
was shown in Table 3. Among the 96 groups of corre-
lation indicators, 18 were significant, W
4
was signif-
icant six times, W
3
and W
2
appeared four times each,
and W
1
appeared three times (p < 0.1).
4 DISCUSSION
In this study, the muscle activity of 10 channels was
measured by EMG when a rocker manipulated the
upper limb, and the muscle synergy was extracted.
Associating Endpoint Accuracy and Similarity of Muscle Synergies
687
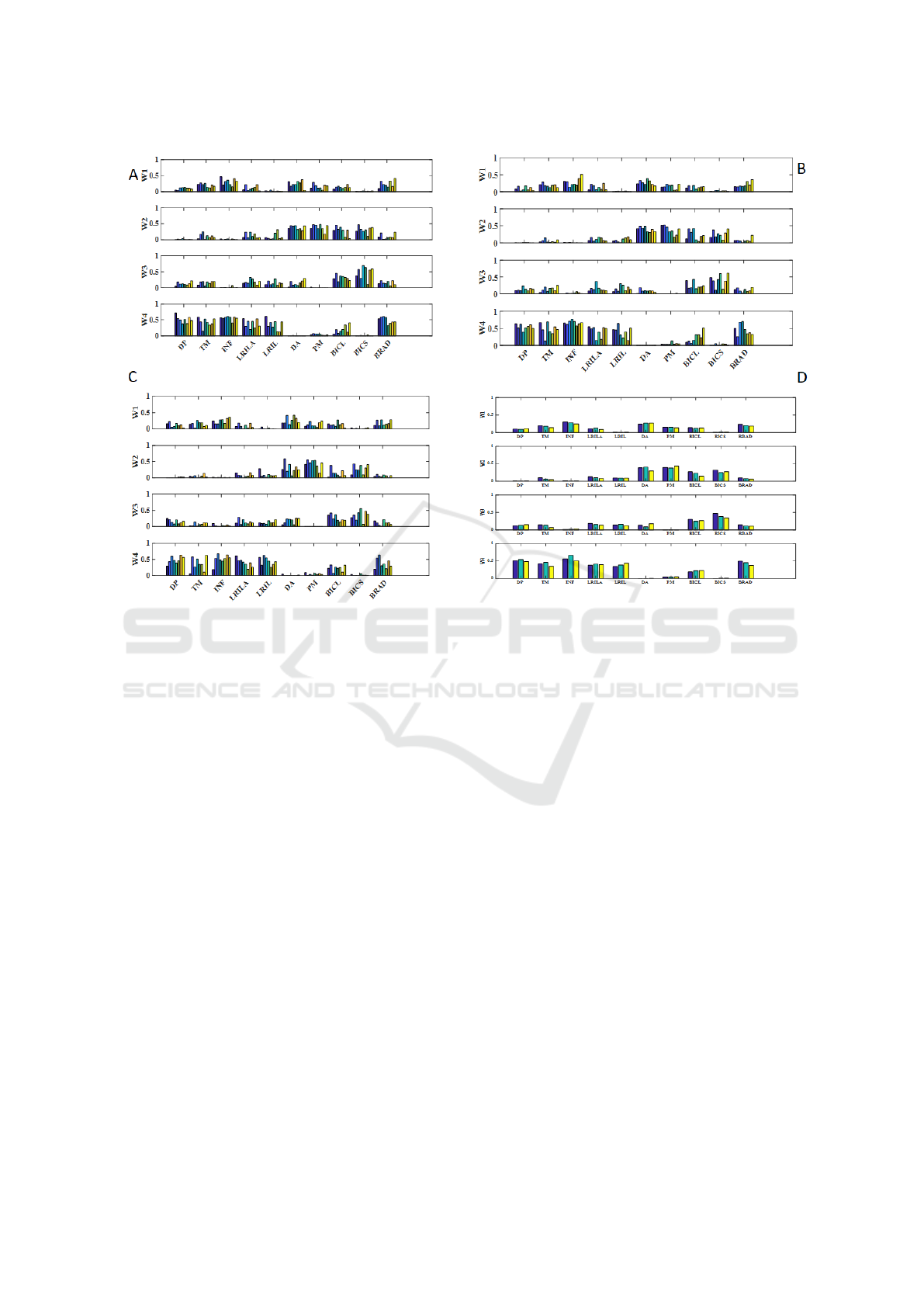
Figure 3: Muscle synergies extracted from 8 subjects (A), (B), (C)Y-axis is the muscle synergies under the different task (D)
the mean muscle synergies from all subjects, The horizontal axis is all corresponding to the selected ten muscles.
The results showed that approximately four individ-
ual synergistic effects were extracted from separate
EMG datasets with a 90% VAF criterion. Under dif-
ferent load conditions, the similarity between the ma-
nipulation performance and muscle synergy of each
action was collected for analysis, and the research be-
tween the manipulation performance and the muscle
synergy effect was clarified from the perspective of
manipulation performance.
4.1 The Load and the Structure of
Muscle Synergy
In this study, we found that changes in loading did
not cause differences in muscle synergy, and mus-
cle synergy was substantially similar in each subject.
This is consistent with previous studies that changes
in loading have a limited effect on synergistic struc-
ture (Nicolas A et al., 2020). Giving the arm a certain
amount of assistance or resistance did not alter the
composition of the muscle synergy used by the sub-
jects during the stretch but instead changed the magni-
tude of the activation spectrum of the muscle synergy.
(Coscia et al., 2014)Previous studies have found that
3 to 5 muscles work together in the three-dimensional
force generation of the upper extremity (Roh et al.,
2012). The four muscle synergies we found in our
study can be analyzed, and the extracted muscle syn-
ergy is influenced by biomechanics and task con-
straints (Todorov et al., 2005). During pronation, the
muscle further weights of D.P., PM, BICL, and BICS
in the W2 synergistic effect are louder, which means
that these muscles work coordinately in pronation.
In the supination action, the muscle weights of D.P.,
T.M., INF, TRILA, and TRIL, synergistic effects of
W4, are more significant. We found that small muscle
groups like BRAD have lower weights in all 4 syner-
gistic modes when the load was increased.
Muscle synergy similarity (R
icc−w2
) per cluster
was not significantly correlated with load (r = 0 ∼
0.17). A study of three-digit force generation re-
ported that the EMG–EMG coherence was not sig-
nificantly affected by force, suggesting that the dis-
tribution of neural drive to multiple hand muscles is
force-independent (Santos et al., 2010). Manipulation
performance has a certain correlation with the load
(r = -0.41, p < 0.05). Several studies have investi-
gated how the motor system modulates limb stiffness
to achieve accurate movements in the presence of un-
stable force loads (Burdet et al., 2001; Franklin and
Theodore E., 2007).
BIOSIGNALS 2024 - 17th International Conference on Bio-inspired Systems and Signal Processing
688
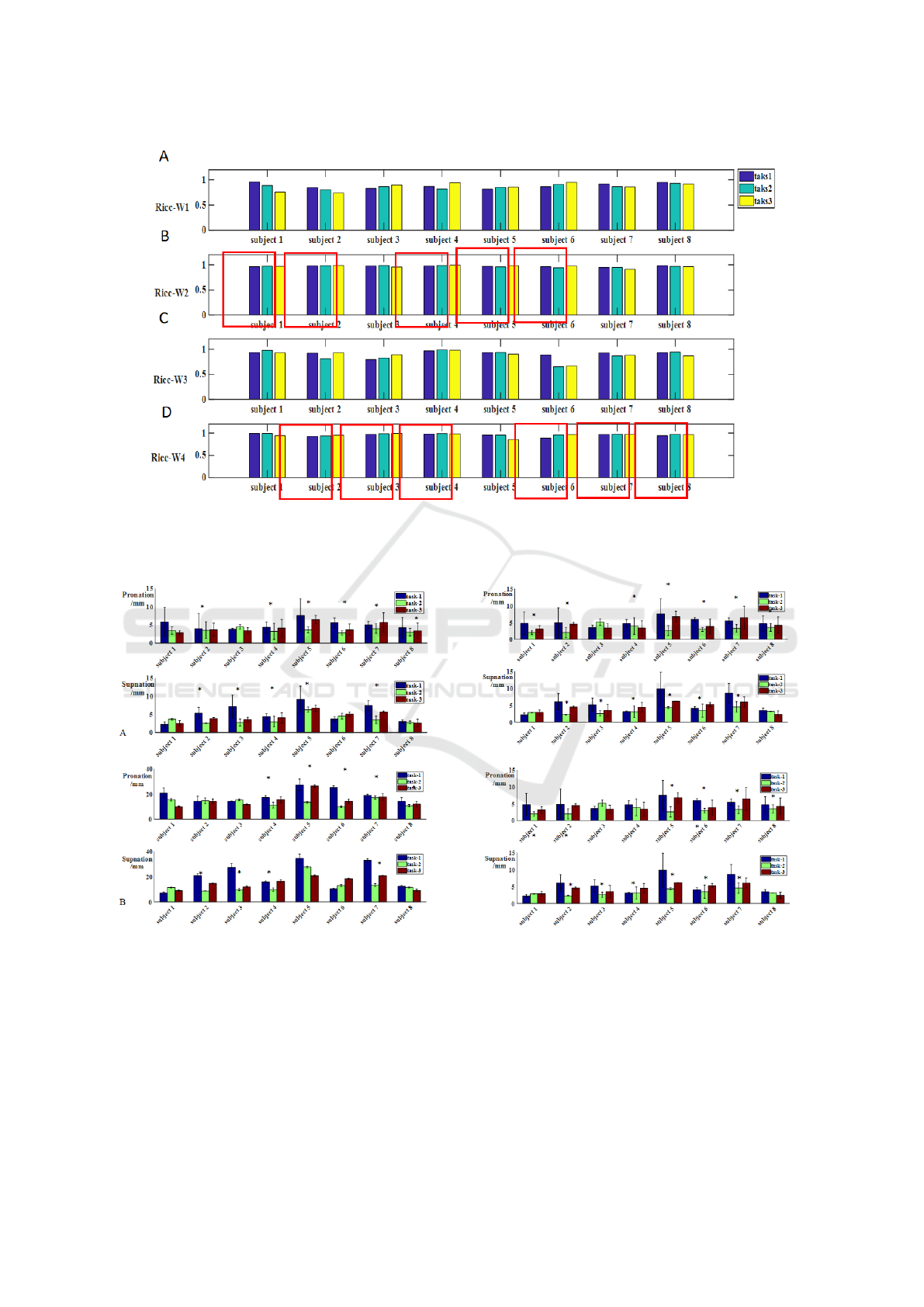
Figure 4: Intragroup correlation coefficients of muscle synergy in three tasks, (A)W 1, (B)W 2, (C)W3, (D)W 4.
The horizontal axis represents eight subjects; The vertical axis represents the intra-group correlation coefficient of muscle
synergy in the three tasks of the subjects.
Figure 5: Results of manipulation for three tasks, the hori-
zontal axis represents eight subjects (A) P.D. during prona-
tion, (B) P.E. during Supination.
4.2 Manipulation Performance and the
Structure Similarity of Muscle
Synergy
Many studies have shown that there are usually many
compensatory solutions for any motor task, and these
Figure 6: Filtered results of manipulation for three tasks,
the horizontal axis represents eight subjects (A) P.D. during
pronation, (B) P.E. during Supination.
different solutions can achieve the same movement
(McKay and Ting, 2008; L. H. Ting, 2004). In our
study, all three tasks were isometric, and the position
distribution at the end of the exercise changed with the
load, which was similar to the previous study (Kojima
et al., 2017). We found that among the three tasks,
Associating Endpoint Accuracy and Similarity of Muscle Synergies
689

Table 1: ICC of muscle synergies and results of manipulation for all trials.
W1 W2 W3 W4 PD-L PD-R Task PR-L PR-R PE-L PE-R
Subject1 0.96 0.96 0.94 0.99 4.02 0.74 1 5.85 2.25 20.74 6.98
Subject1 0.89 0.97 0.98 0.99 1.02 0.32 2 3.47 3.65 15.31 11.4
Subject1 0.76 0.97 0.93 0.94 0.57 0.71 3 2.88 2.53 9.9 8.91
Subject2 0.85 0.98 0.92 0.93 4.06 1.57 1 4.02 5.35 14.12 20.76
Subject2 0.8 0.98 0.81 0.94 2.34 0.02 2 3.57 2.58 14.53 8.6
Subject2 0.74 0.99 0.93 0.95 1.76 0.29 3 3.74 3.81 14.12 14.54
Subject3 0.83 0.97 0.8 0.97 0.24 3.17 1 3.85 7.16 14.1 27.19
Subject3 0.87 0.99 0.83 0.99 0.63 0.94 2 4.44 2.77 15.19 9.74
Subject3 0.89 0.96 0.89 0.99 0.78 0.61 3 3.46 3.56 11.63 11.92
Subject4 0.87 0.97 0.97 0.98 1.49 0.77 1 4.33 4.41 17.09 15.7
Subject4 0.82 0.99 0.98 0.99 2.22 1.49 2 3.25 2.99 11.08 9.62
Subject4 0.94 0.99 0.98 0.98 2.39 1.4 3 4.15 4.07 15.43 16.31
Subject5 0.82 0.97 0.94 0.95 4.61 3.63 1 7.58 9.15 27.05 34.2
Subject5 0.85 0.96 0.94 0.96 0.78 0.67 2 3.65 6.31 13.42 27.54
Subject5 0.86 0.99 0.9 0.86 1.07 0.86 3 6.51 6.7 26.28 20.69
Subject6 0.87 0.96 0.89 0.89 1.36 0.59 1 5.63 3.71 25.03 10.41
Subject6 0.91 0.94 0.65 0.96 0.59 0.81 2 2.86 4.52 9.84 12.96
Subject6 0.95 0.97 0.67 0.96 1.56 0.64 3 3.71 5.07 14.16 18.29
Subject7 0.92 0.95 0.93 0.97 0.93 1.37 1 5.02 7.42 18.8 32.69
Subject7 0.87 0.95 0.86 0.98 1.28 0.99 2 4.02 3.51 17.04 13.3
Subject7 0.86 0.91 0.88 0.97 2.65 0.22 3 5.7 5.72 17.55 20.7
Subject8 0.95 0.98 0.94 0.94 2.86 0.48 1 4.25 3.06 14.13 12.46
Subject8 0.93 0.97 0.94 0.97 1.06 0.39 2 3.03 2.78 10.63 11.48
Subject8 0.92 0.96 0.86 0.96 2.14 1.01 3 3.39 2.62 11.97 9.05
Table 2: Pearson correlation of ICC and results of manipulation.
W1 W2 W3 W4 PD-
L
PD-
R
Task PR-
L
PR-
R
PE-
L
PE-
R
W1 1 -0.22 -0.14 0.23 0.08 -0.14 -0.13 0.04 -0.12 0.02 -0.09
W2 1 0.28 -0.18 0.06 0.13 0 -0.11 -0.18 -0.02 -0.17
W3 1 0.08 0.29 0.03 -0.17 0.21 -0.05 0.2 0.04
W4 1 -0.04 0.05 -0.02 -0.37 -0.24 -
.48*
-0.13
PD-
L
1 0.26 -0.29 .501* 0.1 0.36 0.1
PD-
R
1 -
.41*
0.37 0.65** 0.3 0.63**
Task 1 -0.3 -0.24 -0.32 -0.27
PR-
L
1 0.55** 0.94** 0.46*
PR-
R
1 0.50* 0.97**
PE-
L
1 0.39
PE-
R
1
BIOSIGNALS 2024 - 17th International Conference on Bio-inspired Systems and Signal Processing
690

Table 3: Pearson correlation between similarity and results of manipulation in the cluster.
PA-L PA-R
Task W1 W2 W3 W4 W1 W2 W3 W4
Subject1 1 0.223 255 0.022 0.36 -0.47* -0.512* -0.04 0.213
Subject1 2 0.341 0.345 0.33 -0.093 0.208 0.294 0.053 -0.502*
Subject1 3 0.343 0.254 -0.229 -0.197 -0.076 0.045 -0.356 0.05
Subject2 1 0.318 -0.133 0.093 -0.026 0.017 0.057 -0.215 -0.811***
Subject2 2 -0.245 0.137 -0.587** -0.362 -0.279 -0.158 0.136 0.089
Subject2 3 0.036 -0.267 0.195 -0.038 0.452* 0.279 0.322 -0.337
Subject3 1 0.057 0.383 -0.25 -0.525** -0.033 0.042 0.289 -0.491*
Subject3 2 -0.13 0.083 -0.219 -0.423 -0.288 0.395 0.232 0.235
Subject3 3 0.16 0.038 -0.253 0.403 -0.06 0.141 0.089 0.433
Subject4 1 -0.025 0.094 0.229 0.245 0.097 -0.186 0.229 0.295
Subject4 2 -0.33 -0.285 0.344 0.314 -0.015 0.091 0.17 -0.192
Subject4 3 0.371 0.284 0.018 -0.002 0.189 0.031 0.029 -0.379
Subject5 1 0.242 -0.083 0.024 -0.198 -0.128 -0.325 0.421 0.108
Subject5 2 -0.332 0.425 -0.314 0.059 -0.609** -0.22 0.043 -0.028
Subject5 3 -0.15 0.072 -0.279 -0.039 0.298 0.242 -0.186 -0.125
Subject6 1 -0.046 0.197 0.166 -0.033 0.073 -0.495* -0.429* -0.108
Subject6 2 -0.221 -0.014 -0.539** -0.356 0.102 -0.228 0.292 -0.573**
Subject6 3 0.072 0.434 -0.424 0.386 0.149 0.242 -0.006 -0.165
Subject7 1 0.159 0.322 0.371 -0.225 0.265 0.097 -0.282 0.36
Subject7 2 0.093 -0.017 0.061 0.336 -0.373 -0.332 0.156 0.016
Subject7 3 0.42 -0.482** 0.228 -0.2 0.121 0.209 -0.302 -0.461*
Subject8 1 -0.127 -0.161 -0.113 -0.507** 0.16 -0.258 0.185 0.335
Subject8 2 0.104 -0.484** -0.369 -0.056 -0.185 0.139 0.2 -0.004
Subject8 3 0.278 0.368 0.175 0.169 0.058 -0.182 0.424 0.366
***p < 0.01, **p < 0.05, *p < 0.1
the manipulation error of task 2 was smaller than that
of the other two tasks, and this rule was more evi-
dent when the experimental data was screened by the
quartile method. This means that manipulation per-
formance is not linearly related to loading. According
to the results of Figure 5 and Figure 6, the load causes
a decrease in the manipulation accuracy, but there is
an optimal value within a specific range.
We hypothesize that motion accuracy is re-
lated not only to loading, co-contraction index, and
impedance (Sangwan et al., 2015), but also to muscle
synergy similarity (Choi et al., 2019). This hypothe-
sis is supported by our macroscopic experimental re-
sults. As Table 2 shows, the intra-group correlation
coefficient of W
4
was significantly negatively corre-
lated with P.E.-L (r = -0.48, p < 0.05). In the prona-
tion action, D.P., T.M., INF, TRILA, and TRIL within
the W
4
synergy are antagonistic muscles. This finding
suggests that the CNS activates antagonistic muscles
to adjust motor impedance, minimizing load-induced
interference and improving movement accuracy (Ser-
res and Milner, 1991; Wong et al., 2009).
Further research on a single manipulation was
conducted to observe the correlation between its ac-
curacy and the average similarity of this manipulation
with other manipulations in 7. No apparent statistical
law was found, and the number of significant correla-
tions between W2 and W4 was greater than that of the
other two. From the analysis of the results with signif-
icant correlations, W4 was negatively correlated with
bilateral manipulation errors like the previous results,
and W2 was also negatively correlated with bilateral
manipulation results, which proved the role of the an-
tagonist’s muscles in performing precision-targeted
movements. The manipulating error was smaller as
the synergistic similarity of the antagonistic muscle
groups increased.
5 CONCUSION
Our experiments and in-depth data analysis revealed
that the synergistic structure of muscles remained
strikingly constant across various load levels when
healthy subjects skillfully performed rocker manip-
ulations, the similarity of muscle synergy was then
negatively correlated with load level. Our interpreta-
tion of this result also highlights the body’s capacity
Associating Endpoint Accuracy and Similarity of Muscle Synergies
691

Figure 7: O.A. versus the R
i
of muscle synergy in the cluster
A(W
4
), B(W
3
), C(W
2
), D(W
1
).
to adapt to varying loading levels through the modi-
fication of biomechanical strategies, reflecting an in-
nate and efficient adaptability mechanism. We also
observed the performance of joystick manipulation
was negatively correlated with the similarity of cer-
tain muscle synergy. These results also supported
the alternative hypothesis that the human body in-
creased the activation of antagonistic muscle groups
to achieve better manipulation outcomes. Our results
showed that the muscle coordination model was effec-
tive as an understanding of the effect of load on mus-
cle coordination and manipulation performance in
joystick manipulation. Such an understanding would
help in the ergonomic design of flight joysticks and
the training methods for improving pilots’ upper limb
manipulation.
ACKNOWLEDGEMENTS
The authors sincerely express their gratitude for
the generous financial support of ”National Key
R&D Program of China”(No.2020YFC2007402,
No.2020YFC2007401, No.2020YFC2007404,
No.2020YFC2007403, No.2020YFC2007405,
No.2020YFC2007400), Basic Research Program of
Suzhou (SJC2022011), and Special project of basic
research on frontier leading technology in Jiangsu
Province (BK20192004C).
REFERENCES
A, S., L, D., F, M., H, G., LM, T., and A, d. (2019). A
comprehensive spatial mapping of muscle synergies
in highly variable upper-limb movements of healthy
subjects. Frontiers In Physiology, Vol.10:1231.
Alnajjar, F. (2017). Muscle synergies indices to quan-
tify the skilled behavior in human. CONVERG-
ING CLINICAL AND ENGINEERING RESEARCH
ON NEUROREHABILITATION II, VOLS 1 AND 2,
Vol.15:959–963.
Asaka, T., Yahata, K., Mani, H., and Wang, Y. (2011).
Modulations of muscle modes in automatic postu-
ral responses induced by external surface translations.
Journal of Motor Behavior, Vol.43(No.2):165.
Barnamehei, H., Razaghi, M., Panahi, S., Modabberibe-
jandi, M., Lashgari, M., Safaei, M. A., and Rezaei,
A. (2018a). Identification and quantification of mod-
ular control during Roundhouse kick executed by elite
Taekwondo players. Department of Biomedical En-
gineering, Islamic Azad University, Tehran, Iran De-
partment of Biomedical Engineering, Islamic Azad
University, Tehran, Iran Department of Biomedical
Engineering, Islamic Azad University, Tehran, Iran
Tehran Taekwondo Division, Iran Taekwondo Federa-
tion, Tehran, Iran Tehran Taekwondo Division, Iran
Taekwondo Federation, Tehran, Iran Tehran Taek-
wondo Division, Iran Taekwondo Federation, Tehran,
Iran Tehran Taekwondo Division, Iran Taekwondo
Federation, Tehran, Iran.
Barnamehei, H., Tabatabai Ghomsheh, F., Safar Cherati, A.,
and Pouladian, M. (2018b). Upper limb neuromuscu-
lar activities and synergies comparison between elite
and nonelite athletics in badminton overhead forehand
smash. Applied Bionics & Biomechanics, Vol.2018:1–
10.
Bizzi, E. and Cheung, V. (2013). The neural origin of mus-
cle synergies. FRONTIERS IN COMPUTATIONAL
NEUROSCIENCE, Vol.7(No.1):51.
Bizzi, E., Cheung, V. C. K., d’Avella, A., Saltiel, P., and
Tresch, M. (2008). Combining modules for move-
ment. Brain Research Reviews, Vol.57(No.1):125–
133.
Burdet, E., Osu, R., Franklin, D. W., Milner, T. E.,
and Kawato., M. (2001). The central nervous sys-
tem stabilizes unstable dynamics by learning optimal
impedance. Nature, Vol.414(No.6862):446.
C, W., S, Z., J, H., Z, H., and C, S. (2021). Upper-limb
muscle synergy features in human-robot interaction
with circle-drawing movements. Applied bionics and
biomechanics, Vol.2021:8850785.
Cai, L., YAN, S., DONG, Y., Zhu, J., Chen, L., Liu, B.,
and Ma, X. (2023a). Evaluation method and experi-
mental study of pilot fine handling ability under dif-
ferent loads. Journal of Xi ’an Jiaotong University,
57(06):39–46.
Cai, L., Yan, S., Ouyang, C., Zhang, T., Zhu, J., Chen,
L., Ma, X., and Liu, H. (2023b). Muscle synergies
in joystick manipulation. Frontiers in Physiology,
14:1282295.
Cai, L. M., Yan, S. H., Ouyang, C. Y., Zhang, T. X., Zhu, J.,
Chen, L., Ma, X., and Liu, H. (2023c). Muscle syner-
gies in joystick manipulation. Frontiers in Physiology,
14.
BIOSIGNALS 2024 - 17th International Conference on Bio-inspired Systems and Signal Processing
692

Choi, Y., Kim, Y., Kim, M., and Yoon, B. (2019). Muscle
synergies for turning during human walking. Journal
of Motor Behavior, Vol.51(No.1):1–9.
Coscia, M., Cheung, V. C., Tropea, P., Koenig, A., Monaco,
V., Bennis, C., Micera, S., Bonato, P., and Cheung,
V. C. K. (2014). The effect of arm weight support on
upper limb muscle synergies during reaching move-
ments. Journal of neuroengineering and rehabilita-
tion, Vol.11(No.1):22.
Curado, M. R., Cossio, E. G., Broetz, D., Agostini, M., Cho,
W., Brasil, F. L., Yilmaz, O., Liberati, G., Lepski, G.,
Birbaumer, N., and Ramos-Murguialday, A. (2015).
Residual upper arm motor function primes innerva-
tion of paretic forearm muscles in chronic stroke af-
ter brain-machine interface (bmi) training. PloS one,
Vol.10(No.10):e0140161.
d’Avella, Andrea.and Saltiel, P. and Bizzi, E. (2003). Com-
binations of muscle synergies in the construction
of a natural motor behavior. Nature neuroscience,
Vol.6(No.3):300–308.
Esmaeili, J. and Maleki, A. (2020). Muscle coordina-
tion analysis by time-varying muscle synergy extrac-
tion during cycling across various mechanical condi-
tions. Biocybernetics and Biomedical Engineering,
Vol.40(No.1):90–99.
Ettema, G. J. C., Taylor, Emma.and North, J. D., and Kip-
pers, V. (2005). Muscle synergies at the elbow in static
and oscillating isometric torque tasks with dual de-
grees of freedom. Motor Control, Vol.9(No.1):59–74.
Feldman, A. G. and Levin, M. F. (1995). The origin and use
of positional frames of reference in motor control. Be-
havioral and Brain Sciences, Vol.18(No.4):723–806.
Franklin, D. W., Osu, R., Burdet, E., and Kawato, Mit-
suo.and Milner, T. E. (2003). Adaptation to stable and
unstable dynamics achieved by combined impedance
control and inverse dynamics model. Journal of Neu-
rophysiology, Vol.90(No.5):3270–3282.
Franklin, D. W. and Theodore E., e. a. (2007). Endpoint
stiffness of the arm is directionally tuned to instabil-
ity in the environment. The Journal of Neuroscience,
Vol.27(No.29):7705–7716.
Hermens, H. J., Freriks, B., Dißelhorst-Klug, C., and
Rau, G. (2000). Development of recommenda-
tions for semg sensors and sensor placement proce-
dures. Journal of Electromyography and Kinesiology,
Vol.10(No.5):361–374.
K, Z., Z, Z., H, W., and A, S. (2021). Intra-subject
and inter-subject movement variability quantified with
muscle synergies in upper-limb reaching movements.
Biomimetics, Vol.6(No.4):63.
Kieliba, P., Tropea, P., Pirondini, E., Coscia, M., Micera, S.,
and Artoni, F. (2018). How are muscle synergies af-
fected by electromyography pre-processing? IEEE
Transactions on Neural Systems and Rehabilitation
Engineering, Vol.26(No.4):882–893.
Kojima, S., Takeda, M., Nambu, I., and Wada, Y. (2017).
Relations between required accuracy and muscle syn-
ergy in isometric contraction tasks. 2017 IEEE
INTERNATIONAL CONFERENCE ON SYSTEMS,
MAN, AND CYBERNETICS (SMC), pages 1191–
1195.
L. H. Ting, J. M. M. (2004). A limited set of muscle syner-
gies for force control during a postural task. Journal
of Neurophysiology, Vol.93(No.1):609–613.
Lee, D. D. and Seung, H. S. (1999). Learning the parts of
objects by non-negative matrix factorization. Nature,
Vol.401(No.6755):788.
McGraw, K. O. and Wong, S. P. (1996). Forming inferences
about some intraclass correlation coefficients. Psycho-
logical Methods, Vol.1(No.1):30–46.
McKay, J. L. and Ting, L. H. (2008). Functional muscle
synergies constrain force production during postural
tasks. Journal of biomechanics, Vol.41(No.2):299–
306.
Mira, R. M., Tosatti, L. M., Sacco, M., and Scano, A.
(2021). Detailed characterization of physiological
emg activations and directional tuning of upper-limb
and trunk muscles in point-to-point reaching move-
ments. Current Research in Physiology, Vol.4:60–72.
Miyazaki, H. T. K. H. (2011). Extraction and Implemen-
tation of Muscle Synergies in Hand-Force Control.
Department of Mechanical Science and Bioengineer-
ing,Graduate School of Engineering Science,Osaka
University,Japan.
Nicolas A, T., Romain, M., and Mickael, B. (2020). Shoul-
der muscle activation strategies differ when lifting or
lowering a load. European journal of applied physiol-
ogy, Vol.120(No.11):2417–2429.
Osu, Rieko.and Kamimura, N., , Nakano, E., and Harris,
Chris M.and Wada, Y. (2004). Optimal impedance
control for task achievement in the presence of
signal-dependent noise. Journal of Neurophysiology,
Vol.92(No.2):1199–1215.
Ouyang, C. Y., Cai, L. M., Liu, B., and Zhang, T. X. (2023).
An improved wavelet threshold denoising approach
for surface electromyography signal. Eurasip Journal
on Advances in Signal Processing, 2023(1).
Robert, T. and Latash, M. (2008). Time evolution of
the organization of multi-muscle postural responses
to sudden changes in the external force applied
at the trunk level(article). Neuroscience Letters,
Vol.438(No.2):238–241.
Roh, J., Rymer, W., and Beer, R. (2012). Robustness of
muscle synergies underlying three-dimensional force
generation at the hand in healthy humans(article).
Journal of Neurophysiology, Vol.107(No.8):2123–
2142.
Roh, J., Rymer, W., Perreault, E., Yoo, S., and Beer, R.
(2013). Alterations in upper limb muscle synergy
structure in chronic stroke survivors(article). Journal
of Neurophysiology, Vol.109(No.3):768–781.
Salman, B., Vahdat, S., Lambercy, O., Dovat, L., Burdet, E.,
and Milner, T. (2010). Changes in Muscle Activation
Patterns Following Robot-assisted Training of Hand
Function after Stroke. Sion Frser Universiy, Burnby,
BC CndMcGi Universiy, Monre, QC CndETH Zurich,
Zurich, SwizerndGoech, SwizerndIeri Coege of Sci-
ence, Technoogy nd Medicine, London UKMcGi Uni-
versiy.
Sangwan, S., Green, R. A., and Taylor, N. F. (2015).
Stabilizing characteristics of rotator cuff muscles: a
Associating Endpoint Accuracy and Similarity of Muscle Synergies
693

systematic review. Disability and Rehabilitation,
Vol.37(No.12):1033–1043.
Santos, Alessander Danna-Dos.and Poston, B., Je-
sunathadas, Mark.and Bobich, L., and Hamm, T.
M. M. C. (2010). Influence of fatigue on hand
muscle coordination and emg-emg coherence during
three-digit grasping. Journal of Neurophysiology,
Vol.104(No.6):3576–3587.
Sepehrikia, M., Abedanzadeh, R., and Saemi, E. (2023).
Brain gym exercises improve eye-hand coordination
in elderly males. Somatosensory & motor research,
pages 1–6.
Serres, S. J. D. and Milner, T. E. (1991). Wrist muscle ac-
tivation patterns and stiffness associated with stable
and unstable mechanical loads. Experimental brain
research, Vol.86(No.2):451–458.
Taborri, J., Palermo, E., Masiello, D., and Rossi, S.
(2017). Factorization of EMG via muscle synergies
in walking task: Evaluation of intra-subject and
inter-subject variability. Juri Taborri:Department
of Mechanical and Aerospace Engineering,
Sapienza University of Rome, Roma, Italy Eduardo
Palermo:Department of Mechanical and Aerospace
Engineering, Sapienza University of Rome, Roma,
Italy Denisa Masiello:Department of Mechanical
and Aerospace Engineering, Sapienza University
of Rome, Roma, Italy Stefano Rossi:Department of
Economics and Management-Industrial Engineering
(DEIM), University of Tuscia, Viterbo, Italy.
Tang, L., Chen, X., Cao, S., Wu, D., Zhao, G., and Zhang,
X. (2017). Assessment of upper limb motor dysfunc-
tion for children with cerebral palsy based on muscle
synergy analysis. Frontiers in Human Neuroscience,
Vol.11(No.0):130.
Todorov, E., Li, W., and Pan, X. (2005). From task pa-
rameters to motor synergies: A hierarchical frame-
work for approximately-optimal control of redun-
dant manipulators. Journal of robotic systems,
Vol.22(No.11):691–710.
Torres-Oviedo, G. W. H. and Ting, L. H. (2007). Muscle
synergies characterizing human postural responses.
Journal of Neurophysiology, Vol.98(No.4):2144–
2156.
Tsubasa, Sano and Misaki, T., Isao, N., and Yasuhiro, W.
(2020). Relations between speed-accuracy trade-off
and muscle synergy in isometric contraction tasks. An-
nual International Conference of the IEEE Engineer-
ing in Medicine and Biology Society., Vol.2020:4803–
4806.
Velden, L. L. v. d., Benner, J. L., Onneweer, B., Haar-
man, C. J. W., Selles, R., Ribbers, G., and Roebroeck,
M. E. (2022). Reliability and validity of a new diag-
nostic device for quantifying hemiparetic arm impair-
ments: An exploratory study. Journal of Rehabilita-
tion Medicine, Vol.54:jrm00283.
Wang, T., Okada, S., Guo, A., Makikawa, M., and Sh-
iozawa, N. (2021). Effect of Assist Robot on Muscle
Synergy during Sit-to-Stand Movement.
Wong, J., Wilson, Elizabeth T.and Malfait, N., and Grib-
ble, P. L. (2009). Limb stiffness is modulated with
spatial accuracy requirements during movement in the
absence of destabilizing forces. Journal of Neurophys-
iology, Vol.101(No.3):1542–1549.
Zhao, K., Zhang, Z., Wen, H., Wang, Z., and Wu, J. (2019).
Modular organization of muscle synergies to achieve
movement behaviors. Journal of Healthcare Engi-
neering, Vol.2019:8130297.
BIOSIGNALS 2024 - 17th International Conference on Bio-inspired Systems and Signal Processing
694
