
Automatic Assessment of Skill and Performance in Fencing Footwork
Filip Malawski
a
, Marek Krupa and Ksawery Kapela
Faculty of Computer Science, AGH University of Science and Technology, Krakow, Poland
Keywords:
Action Recognition, Pattern Recognition, Sports Support, Fencing, Assistive Computer Vision.
Abstract:
Typically human action recognition methods focus on the detection and classification of actions. In this work,
we consider qualitative evaluation of sports actions, namely in fencing footwork, including technical skill and
physical performance. In cooperation with fencing coaches, we designed, recorded, and labeled an extensive
dataset including 28 variants of incorrect executions of fencing footwork actions as well as corresponding
correct variants. Moreover, the dataset contains action sequences for action recognition tasks. This is the most
extensive fencing action dataset collected to date. We propose and evaluate an expert system, based on pose
estimation in video data, for measuring relevant motion parameters and distinguishing between correct and in-
correct executions of actions. Additionally, we validate a method for temporal segmentation and classification
of actions in sequences. The obtained results indicate that the proposed solution can provide relevant feedback
in fencing training.
1 INTRODUCTION
Human action recognition (HAR) has applications
in multiple areas such as tracking daily activities,
human-computer interfaces, or rehabilitation support
(Kong and Fu, 2022). One prominent application is
tracking and analyzing actions in sports in order to
provide valuable information for athletes and coaches
(Wu et al., 2022). Supporting sports training requires
not only identifying when and which actions occur but
also measuring how well an action was performed.
There are two relevant aspects for assessing the ex-
ecution of a sports action. The first is physical per-
formance in terms of speed, force, acceleration, time,
range, etc. In many sports disciplines achieving better
physical performance (e.g. speed) gives an advantage
over the opponent or even is the main goal by itself.
The second aspect is technical correctness, which de-
pends on the athlete’s skill and can be understood
as precision of movement. Those two aspects often
stand in opposition - the faster or stronger the move-
ment the less precise it becomes. E.g. in volleyball,
it is beneficial to hit the ball with a high force so it
would go faster and therefore be more challenging for
the opposing team, however, there is little gain from
the high speed if the ball falls outside of the court.
In this work, we consider assessing actions in
fencing, particularly footwork actions, which consti-
a
https://orcid.org/0000-0003-0796-1253
tute a large part of the training routine in this dis-
cipline. Bladework, while equally important, is out
of the scope of this work. Fencing requires both
high physical performance and high technical skills
in order for the athletes to be effective. Instructions
and feedback from a coach are crucial for improving
fencers’ level. However, usually a coach has to split
their focus to the entire group, rather than train each
person individually. We propose an automated sys-
tem that will provide personalized feedback for foot-
work exercises, without the supervision of a coach. It
is worth mentioning that the purpose of our proposed
solution is not to substitute the coach but rather to pro-
vide a complementary means of training. We expect
that automated assessment should facilitate obtaining
a reasonable level of correctness in performing basic
actions as well as help eliminate typical errors. There-
fore fencers’ time with a coach can be better spent on
more advanced exercises.
A relevant limitation in introducing automatic as-
sessment of sports actions is the cost and availability
of the employed solutions. While professional motion
capture systems provide high accuracy in tracking hu-
man motion, those are usually affordable only for pro-
fessional teams. On the contrary, the goal of this work
was to design a low-cost, widely available system. To
that end, our solution employs only RGB video data,
that can be acquired with a typical smartphone. More-
over, the entire data processing framework can also
Malawski, F., Krupa, M. and Kapela, K.
Automatic Assessment of Skill and Performance in Fencing Footwork.
DOI: 10.5220/0012577600003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 4: VISAPP, pages
637-644
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
637

run on a mobile device. Our contribution includes the
acquisition of an extensive, novel dataset tailored for
analysis of technical correctness and performance of
fencing footwork, as well as designing, implement-
ing, and evaluating methods for assessing technical
skill and performance of footwork actions. We also
validate a method for temporal segmentation and ac-
tion classification. Our work was conducted in coop-
eration with fencing coaches in order to ensure that
the proposed solution has practical value in fencing
training. To the best of our knowledge, this is the
first work to address qualitative assessment of a wide
range of motion parameters in fencing.
2 RELATED WORK
In general, HAR can include different data modali-
ties such as RGB, depth, infrared, inertial, or even au-
dio or radar signals (Sun et al., 2022). In this work,
we focus solely on RGB video modality, which by it-
self covers a wide range of methods and applications
(Beddiar et al., 2020). Early approaches focused on
finding relevant points of interest in videos (Laptev,
2005) or estimating motion trajectories (Wang and
Schmid, 2013). With the extensive development of
deep learning methods, methods based on neural net-
works have become popular, in particular employ-
ing convolutional neural networks (CNN) (Karpathy
et al., 2014; Feichtenhofer et al., 2017). An alterna-
tive approach is to first create an intermediate repre-
sentation of the human pose by detecting and track-
ing relevant joints of persons present in the visual
data. This approach has gained much popularity with
the release of the Kinect sensor, which employed
depth maps to provide so-called skeleton modality
(Han et al., 2013). Later works focused on estimat-
ing pose from RGB data (Munea et al., 2020). Due
to employing deep learning techniques several effec-
tive RGB pose estimation methods were proposed
(Kendall et al., 2015; Toshev and Szegedy, 2014). Re-
cent solutions can run effectively on mobile devices
(Bazarevsky et al., 2020) and are available as ready-
to-use components in mobile frameworks (Google,
2023). Pose estimation is particularly useful in sports
analysis as it provides detailed information regarding
the movement of different body parts.
Action recognition in sports differs from other ap-
plications, as it covers a wide range of sports disci-
plines, each with specific actions (Host and Iva
ˇ
si
´
c-
Kos, 2022) and therefore specific datasets (Wu et al.,
2022). Some works focus on the classification of
sports disciplines, starting with small datasets of 10
disciplines (Soomro and Zamir, 2015) and then ex-
panding to large-scale datasets including hundreds of
classes (Kong et al., 2017). Another approach is to
define tasks for tracking elements specific to partic-
ular disciplines. In team sports player tracking was
investigated (Manafifard et al., 2017; Fu et al., 2020).
Ball trajectory tracking is a relevant problem for many
disciplines, such as tennis (Zhou et al., 2014). Meth-
ods for qualitative assessment of action are less com-
mon and usually even more specific to particular dis-
ciplines. Authors of (Wang et al., 2019) propose a
system for detecting incorrect poses in skiing. Golf
swings are analyzed in (Ko and Pan, 2021) using
CNNs and LSTM networks. Quality of gymnastic ac-
tions is assessed in (Zahan et al., 2023) using sparse
temporal video mapping.
Several works address action recognition in fenc-
ing. Blade action classification was performed using
either EMG data (Fr
`
ere et al., 2010; Klempous et al.,
2021), or motion capture systems (Mantovani et al.,
2010). Basic fencing footwork actions were classi-
fied based on visual and inertial data using local trace
images (Malawski and Kwolek, 2018), joint motion
history context (Malawski and Kwolek, 2019), and
temporal convolutional networks (Zhu et al., 2022).
Methods for temporal segmentation of footwork ac-
tions were proposed in (Malawski and Krupa, 2023).
Our current work advances this research area even
further, by addressing the problem of qualitative anal-
ysis of actions. In cooperation with fencing experts,
we identify key parameters in fencing exercises, that
can be measured and evaluated using RGB videos
and automatic motion analysis methods. We have
recorded a novel, dedicated dataset including multiple
variants of correct and incorrect executions of foot-
work actions. We propose and evaluate a solution for
analyzing fencing skills and performance and provid-
ing relevant feedback.
3 FENCING FOOTWORK
Fencers typically start in a basic ready stance (called
’on guard’) with the sword hand and front foot di-
rected towards the opponent, see Fig. 1 (top-left).
Step forward is performed by moving the front leg and
then then the back leg, without crossing them. Step
backward is analogous but starts with the back leg.
Offensive actions are most often performed with a
lunge - a dynamic motion in which the fencer reaches
out with the front foot while straightening the back
leg, see Fig. 1 (top-right). For defense, other than
parry with the blade, fencers can perform dodge ac-
tions, the two most common being dodge down and
dodge back. During dodge down action, the fencer
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
638

Figure 1: Selected fencing footwork actions: on guard posi-
tion (top-left), lunge (top-right), dodge down (bottom-left),
dodge back (bottom-right).
lifts both feet and bends the knees in order to fall on
the feet with acceleration gained from gravity, see Fig.
1 (bottom-left). Dodge back is performed by dynam-
ically moving the front leg towards the back leg and
finishing in a tilted position Fig. 1 (bottom-right).
The effectiveness of each footwork action depends
heavily on physical performance, particularly speed
and range, as well as technical skill. In steps, proper
distance between feet must be maintained, proper hip
level (due to bent knees) should be kept, also the
front knee should be fully straightened in step for-
ward. The performance of steps is measured with the
speed of moving. Technical aspects of the lunge in-
clude straightening the front knee in the initial phase,
then straightening the back knee in the final phase, as
well as maintaining proper front knee angle and body
tilt at the end of the action. The range is relevant for
the lunge performance. In dodge down it is important
to lift the feet in order to take advantage of the grav-
itational acceleration, but without jumping up (lifting
hips), which would slow down the action. In dodge
back proper body tilt must be performed at the end
and also relative timing of hand and body motion is
relevant. All such aspects must be taken into consid-
eration when assessing footwork actions.
4 METHODS
The main goal of this work is an automatic assess-
ment of the quality of footwork actions, however, it
required multi-stage development. First of all, we
needed to obtain a dedicated dataset, that would in-
clude not only sequences of footwork actions but also
multiple variants of each considered action, with cor-
rect and incorrect executions. Secondly, RGB pose
...
Figure 2: Architecture of the proposed system. Starting
with RGB data, pose estimation and action recognition are
performed, followed by analysis of selected parameters,
such as knee angles.
estimation was performed using state-of-the-art meth-
ods. Then, temporal segmentation and classifica-
tion of actions were performed on sequences of foot-
work exercises in order to evaluate recognizing ac-
tions during footwork practice. Finally, we developed
an expert system for the assessment of technical skill
and performance measured by 15 relevant parameters.
The architecture of the system is presented in Fig. 2.
4.1 Data Acquisition
Obtaining a proper dataset was one of the crucial as-
pects of this work. First, we conducted consultations
with fencing experts in order to prepare a list of foot-
work actions and parameters describing technical cor-
rectness and performance. Secondly, initial record-
ings were made, including different variants of ac-
tions performed by an experienced fencer. Acquired
material was analyzed both by a computer vision spe-
cialist and fencing coach and jointly a list of final pa-
rameters to be measured was prepared, as listed in
Table 1. The acquisition plan for each recorded per-
son was as follows. First, three sequences of contin-
uous fencing footwork were recorded, each with at
least three repetitions of each action, performed in
random order. This part was collected for the devel-
opment and evaluation of temporal segmentation and
action classification methods. Next, the fencers were
asked to perform specific variants of each action, cor-
responding to correct and incorrect execution for each
considered parameter. E.g. they would perform a
correct lunge then a lunge with not fully straightened
front knee, then a lunge with incorrect body tilt, etc.
Each variant was performed only once, due to time
constraints in recording sessions, however, a fencing
expert supervised the process and asked to repeat an
action if it was not representative of a given parame-
ter. It is however worth mentioning, that while some
executions strongly emphasized specific variants, oth-
ers may differ only slightly from the correct variant,
depending on the action and performing person. The
Automatic Assessment of Skill and Performance in Fencing Footwork
639

Figure 3: Pose estimation of fencing footwork action.
data was acquired using a mobile device (Samsung
A52s smartphone) using a custom video recording ap-
plication with 60 frames per second. Simultaneously
inertial data from five inertial sensors mounted on the
fencer were recorded. While the inertial data is out of
the scope of this work, it allows for multimodal ac-
tion recognition in future works. All recordings were
manually labeled by a fencing expert.
4.2 Pose Estimation
Our method relies on RGB pose estimation, for which
we employ the Blazepose algorithm (Bazarevsky
et al., 2020), available in the Mediapipe library
(Google, 2023). This implementation can also be eas-
ily used on mobile devices. A total of 33 keypoints
are tracked, however not all are relevant for this work,
e.g. face landmarks or positions of index fingers and
thumbs are not used in our scenario. An example of
pose estimation for the lunge action is presented in
Fig. 3. Additionally, the positions of joints are fil-
tered with a moving average filter (window size =
9) to remove glitches in pose estimation. Since the
employed state-of-the-art algorithm was trained on a
large dataset, it is robust to variance in environmental
conditions, such as lighting or background, as well as
variance regarding tracked persons, such as different
clothes or different proportions of body parts. There-
fore, our motion analysis models can focus on captur-
ing variance in the performance of actions.
4.3 Action Recognition
While action recognition is not the primary goal of
this work, we adapt previously proposed methods
for temporal segmentation and action classification
on the sequence recordings of our dataset. We ex-
tend the approach proposed in (Malawski and Krupa,
2023) by replacing handcrafted features with an auto-
mated framework for feature extraction and selection,
namely TSFEL (Barandas et al., 2020). Initial data
includes a time series of positions of all joints tracked
by the Mediapipe library. All features available in the
framework were extracted in time windows of size
50, and then feature selection based on a decision tree
ensemble (ExtraTree) was employed to automatically
select the most relevant features. Each frame is clas-
sified based on its context (time window) using the
XGBoost classifier, and then neighboring frames of
the same class are combined as segments correspond-
ing to actions. Outlier segments, with less than 15
frames of specific action are reclassified to match the
closest larger action segment. While we consider five
top-level actions for qualitative analysis, action recog-
nition includes a total of nine classes in order to cover
the full spectrum of actions. Additional classes in-
clude return from lunge, return from dodge down, re-
turn from dodge back, and ’other’, which corresponds
to all untypical actions that sometimes occur, such as
jumping steps.
4.4 Skill and Performance Assessment
The key difficulty in this work was identifying how
to measure relevant parameters of motions in order to
assess the quality of actions. Table 1 presents a list
of technical (T) and performance (P) parameters of
footwork actions, created in cooperation with fencing
experts. While other aspects of motion may be rel-
evant as well, we include only parameters that were
identified as common sources of errors in exercises,
while at the same time being measurable in video
recordings. The table includes a short description of
expected correct and incorrect executions as well as
the corresponding parameter measured with the pro-
posed method, based on automatic pose estimation.
Depending on the parameter, its value is measured in
different phases of the action, which is also included
in the table. In the moving phase, the pose dynam-
ically changes and usually min. or max. value of
a parameter is relevant and in the resting phase the
pose is stable for a short time (e.g. after lunge) and
static parameters such as knee angle are considered.
Some parameters are measured in both phases, e.g.
hip height in steps.
For step forward and step backward actions most
parameters are similar, except for straightening of the
front knee, which is relevant only in the step forward.
Feet distance is measured relative to shoulder dis-
tance, which is estimated based on the entire record-
ing, as in some frames it is not well visible. Mea-
suring speed is tricky, as observed changes in posi-
tion depend on the distance to the camera. Moreover,
slow, normal, and fast movements may be different
for each fencer. Therefore, we normalize this value
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
640
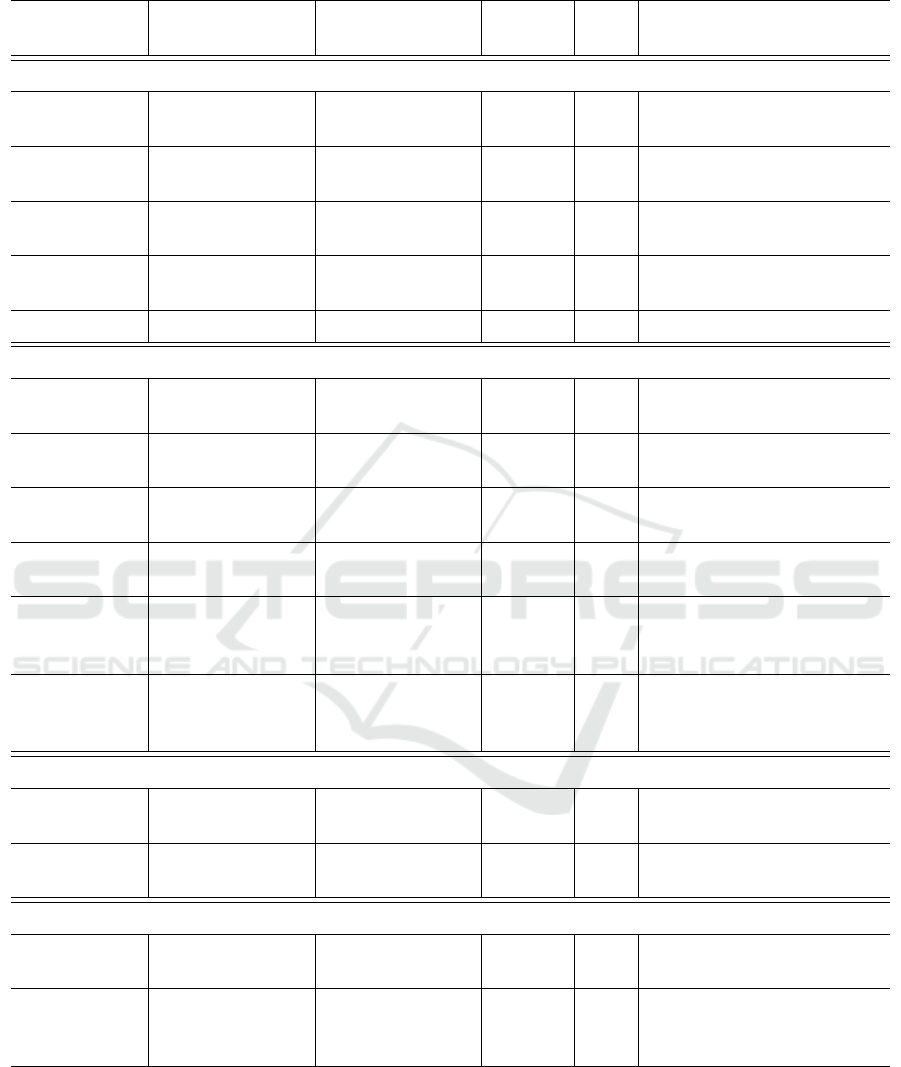
Table 1: Fencing footwork parameters.
Action
param.
Correct Incorrect Phase Type Measured param.
Step forward (SF) / step backward (SB)
Feet distance Similar as
shoulder width
Feet too close or
too wide
Resting T Ratio of min. and max.
ankle dist. to shoulder dist.
Knees angle Knees bent
moderately
Knees almost
straight
Both T Mean knee angle (both
knees)
Hips height
stability
Small variance Large variance Both T Variance of hip to ankle
distance
Front knee
straight. (SF)
Fully
straightened
Not fully
straightened
Moving T Max. front knee angle
Speed - - Moving P Mean velocity of hip joints
Lunge
Front knee
straightened
Fully
straightened
Not fully
straightened
Moving T Max. front knee angle
Back knee
straightened
Fully
straightened
Not fully
straightened
Resting T Max. back knee angle
Front knee
position
Above ankle Above middle or
end of the foot
Resting T Horizontal dist. between the
front ankle and front knee
Body tilt Medium tilt No tilt or too
much tilt
Resting T Hip to shoulder line angle
relative to the ground
Arm
straightening
timing
Before body
movement
After body
movement
Moving T Elbow angle after ten
frames
Range - - Both P Horizontal distance between
hip position before and after
the lunge
Dodge down
Feet lifted Feet slightly
lifted
Feet not lifted Moving T Max. vertical distance of
ankles
Hips not
lifted
Hips not lifted Hips lifted Moving T Max. vertical distance of
hips
Dodge back
Body tilt Approx. 45
degrees
Too small or too
much
Resting T Hip to shoulder line angle
relative to the ground
Arm
straightening
timing
Approx. at the
same time as
body
Too soon or too
late
Moving T Elbow angle after 15 frames
Automatic Assessment of Skill and Performance in Fencing Footwork
641

Table 2: Results of action assessment (F1 score).
Variant XGB SVM
Step forward
Feet too narrow 0.952 0.947
Feet too wide 0.875 0.824
Knees bent too little 0.706 0.778
Speed slow 0.800 0.800
Speed fast 0.875 0.875
Front knee not str. 0.824 0.857
Hips unstable 0.778 0.800
Step backward
Feet too narrow 0.941 0.941
Feet too wide 0.800 0.875
Knees bent too little 0.667 0.533
Speed slow 0.875 0.778
Speed fast 0.933 0.933
Hips unstable 0.900 0.900
Lunge
Front knee not str. S 0.842 0.889
Front knee not str. L 0.941 1.000
Back knee bent 0.727 0.762
Range short 0.917 0.957
Range long 0.900 0.842
Front knee too far S 0.917 0.917
Front knee too far L 0.963 1.000
Body tilt too small 0.800 0.800
Body tilt too much 0.875 0.800
Arm after body 0.909 1.000
Dodge down
Feet not lifted 0.833 0.769
Hips lifted 0.952 0.842
Dodge back
Body tilt too small 0.900 0.900
Body tilt too much 0.957 0.900
Arm after body 0.947 0.947
Mean 0.868 0.864
using mean leg length (hip to knee to ankle distance)
from the entire recording. Similarly, the range of
lunge action is also normalized using mean leg length.
5 EXPERIMENTS
5.1 Dataset and Action Recognition
Our dataset includes recordings acquired with 8 ex-
perienced fencers, 5 male and 3 female. Sequences
include from 9 to approx. 50 repetitions of each ac-
tion per person, depending on the action (less com-
mon are dodging actions, most common are steps).
A total of 40 variants of actions were recorded with
each person, including correct and incorrect execu-
tions in the context of different action parameters. As
mentioned before, temporal segmentation and action
classification was not a primary objective of this work
and therefore we do not include a comparative study
for this part. The method described in Section 4.3 was
evaluated and actions were considered to be recog-
nized correctly if the middle frame of predicted action
was included in the ground truth segment. F1 score =
95.5% was obtained. Further experiments, consider-
ing the qualitative analysis of actions, were performed
using recorded variants of actions.
5.2 Skill and Performance Assessment
For each variant, a separate binary classifier (correct
vs incorrect) was trained and evaluated using leave-
one-person-out cross-validation (eight folds, one test
person in each fold). Both XGBoost and SVM clas-
sifiers were evaluated. Table 2 presents F1 scores
obtained for each considered variant. Only variants
with incorrect execution are listed, as they were in-
ternally compared to the correct variant, using the bi-
nary classifiers. In the case of performance param-
eters (speed, range) there are no correct or incorrect
executions, however, specific variants (e.g. slow, fast
speed) were compared against typical execution (e.g.
normal speed). Some variants were recorded sepa-
rately with small (S) and large (L) differences from
correct execution.
Results indicate that for most parameters it is pos-
sible to efficiently distinguish between correct and in-
correct variants. Out of 28 variants of incorrect ex-
ecutions only 4 have F1 score lower than 0.8, while
13 have F1 score at least 0.9. Particularly difficult to
measure are parameters regarding bending the knees,
both in steps and in lunges. On the other hand, some
very important errors in executions, such as keeping
the feet too close in steps or not straightening the front
knee in a lunge are very well recognized. The mean
F1 score is 0.868 for the XGBoost classifier and 0.864
for SVM. While on average both classifiers perform
very similarly, there are some significant differences
in specific parameters. This indicates that more data
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
642

points would be beneficial to obtain more statistical
information. Alternatively, thresholds between cor-
rect and incorrect executions could be determined by
a human expert.
We analyzed several cases in which the classi-
fication of correct and incorrect variants failed, in
order to investigate possible reasons. One relevant
source of errors is how each variant was performed
by each person. In some cases, the difference be-
tween incorrect and correct action performance was
relatively small. While human experts are able to dis-
tinguish these variants, the differences in executions
were not always captured by the automatic system.
For some parameters, we expect that additional per-
user calibration may be needed, as inter-person dif-
ferences may be higher than differences between cor-
rect and incorrect variants. Occasionally, problems
stemmed from incorrect pose estimation. Mediapipe
is robust to varying environmental conditions, more-
over employing moving average filters out most out-
liers. However, some errors in pose estimation still
occur, which may be particularly problematic for pa-
rameters based on minimum or maximum values.
6 CONCLUSIONS
In this work, we addressed the problem of qualita-
tive evaluation of actions in fencing footwork, includ-
ing assessment of technical skill and physical perfor-
mance. The goal was to provide relevant information
for fencing training evaluation.
In cooperation with fencing experts, we designed
and recorded a novel dataset including sequences of
fencing footwork practice as well as 40 variants of
actions per person (28 with incorrect execution vari-
ants to be recognized). The dataset includes manual
labels for actions and variants, provided by fencing
experts. To the best of our knowledge, this is cur-
rently by far the most detailed dataset of fencing ac-
tions. The employed method for temporal segmenta-
tion and action classification is sufficiently effective
to be used in practical applications. We designed and
evaluated specific methods for measuring motion pa-
rameters relevant to each variant of incorrect execu-
tion. Results indicate that in most cases, our system
can provide relevant feedback for fencers.
In future work, we intend to focus on improving
the recognition of several action variants by including
user-specific calibration or adaptation mechanisms.
Moreover, we plan to investigate the idea of using
expert-based thresholds instead of automatic ones. Fi-
nally, the proposed solution is currently being imple-
mented in a mobile application. Therefore, we expect
to validate our approach during fencing training ses-
sions and gather valuable feedback from fencers and
coaches.
ACKNOWLEDGEMENTS
The research presented in this paper was supported
by the National Centre for Research and Develop-
ment (NCBiR) under Grant No. LIDER/37/0198/L-
12/20/NCBR/2021. Data acquisition and expert
consultations were carried out in cooperation with
Aramis Fencing School (aramis.pl).
REFERENCES
Barandas, M., Folgado, D., Fernandes, L., Santos, S.,
Abreu, M., Bota, P., Liu, H., Schultz, T., and Gam-
boa, H. (2020). Tsfel: Time series feature extraction
library. SoftwareX, 11:100456.
Bazarevsky, V., Grishchenko, I., Raveendran, K., Zhu, T.,
Zhang, F., and Grundmann, M. (2020). Blazepose:
On-device real-time body pose tracking. arXiv
preprint arXiv:2006.10204.
Beddiar, D. R., Nini, B., Sabokrou, M., and Hadid, A.
(2020). Vision-based human activity recognition: a
survey. Multimedia Tools and Applications, 79(41-
42):30509–30555.
Feichtenhofer, C., Pinz, A., and Wildes, R. P. (2017).
Spatiotemporal multiplier networks for video action
recognition. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 4768–
4777.
Fr
`
ere, J., G
¨
opfert, B., N
¨
uesch, C., Huber, C., Fischer, M.,
Wirz, D., and Friederich, N. (2010). Kinematical and
emg-classifications of a fencing attack. International
journal of sports medicine, pages 28–34.
Fu, X., Zhang, K., Wang, C., and Fan, C. (2020). Multiple
player tracking in basketball court videos. Journal of
Real-Time Image Processing, 17:1811–1828.
Google (2023). Mediapipe.
Han, J., Shao, L., Xu, D., and Shotton, J. (2013). Enhanced
computer vision with microsoft kinect sensor: A re-
view. IEEE Transactions on Cybernetics, 43(5):1318–
1334.
Host, K. and Iva
ˇ
si
´
c-Kos, M. (2022). An overview of human
action recognition in sports based on computer vision.
Heliyon.
Karpathy, A., Toderici, G., Shetty, S., Leung, T., Suk-
thankar, R., and Fei-Fei, L. (2014). Large-scale video
classification with convolutional neural networks. In
Proceedings of the IEEE conference on Computer Vi-
sion and Pattern Recognition, pages 1725–1732.
Kendall, A., Grimes, M., and Cipolla, R. (2015). Posenet: A
convolutional network for real-time 6-dof camera re-
localization. In Proceedings of the IEEE international
conference on computer vision, pages 2938–2946.
Automatic Assessment of Skill and Performance in Fencing Footwork
643

Klempous, R., Kluwak, K., Atsushi, I., G
´
orski, T., Niko-
dem, J., Bo
˙
zejko, W., Chaczko, Z., Borowik, G.,
Rozenblit, J., and Kulbacki, M. (2021). Neural
networks classification for training of five german
longsword mastercuts-a novel application of motion
capture: analysis of performance of sword fencing in
the historical european martial arts (hema) domain. In
2021 IEEE 21st International Symposium on Compu-
tational Intelligence and Informatics (CINTI), pages
000137–000142. IEEE.
Ko, K.-R. and Pan, S. B. (2021). CNN and bi-LSTM based
3D golf swing analysis by frontal swing sequence im-
ages. Multimedia Tools and Applications, 80:8957–
8972.
Kong, Y. and Fu, Y. (2022). Human action recognition and
prediction: A survey. International Journal of Com-
puter Vision, 130(5):1366–1401.
Kong, Y., Tao, Z., and Fu, Y. (2017). Deep sequential con-
text networks for action prediction. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 1473–1481.
Laptev, I. (2005). On space-time interest points. Interna-
tional journal of computer vision, 64:107–123.
Malawski, F. and Krupa, M. (2023). Temporal Segmenta-
tion of Actions in Fencing Footwork Training. Com-
puter Science Research Notes, 3301:241–248.
Malawski, F. and Kwolek, B. (2018). Recognition of action
dynamics in fencing using multimodal cues. Image
and Vision Computing, 75:1–10.
Malawski, F. and Kwolek, B. (2019). Improving multi-
modal action representation with joint motion history
context. Journal of Visual Communication and Image
Representation, 61:198–208.
Manafifard, M., Ebadi, H., and Moghaddam, H. A. (2017).
A survey on player tracking in soccer videos. Com-
puter Vision and Image Understanding, 159:19–46.
Mantovani, G., Ravaschio, A., Piaggi, P., and Landi, A.
(2010). Fine classification of complex motion pattern
in fencing. Procedia Engineering, 2(2):3423–3428.
Munea, T. L., Jembre, Y. Z., Weldegebriel, H. T., Chen,
L., Huang, C., and Yang, C. (2020). The progress of
human pose estimation: A survey and taxonomy of
models applied in 2d human pose estimation. IEEE
Access, 8:133330–133348.
Soomro, K. and Zamir, A. R. (2015). Action recognition in
realistic sports videos. In Computer vision in sports,
pages 181–208. Springer.
Sun, Z., Ke, Q., Rahmani, H., Bennamoun, M., Wang, G.,
and Liu, J. (2022). Human action recognition from
various data modalities: A review. IEEE transactions
on pattern analysis and machine intelligence.
Toshev, A. and Szegedy, C. (2014). Deeppose: Human pose
estimation via deep neural networks. In Proceedings
of the IEEE conference on computer vision and pat-
tern recognition, pages 1653–1660.
Wang, H. and Schmid, C. (2013). Action recognition with
improved trajectories. In Proceedings of the IEEE
international conference on computer vision, pages
3551–3558.
Wang, J., Qiu, K., Peng, H., Fu, J., and Zhu, J. (2019). Ai
coach: Deep human pose estimation and analysis for
personalized athletic training assistance. In Proceed-
ings of the 27th ACM international conference on mul-
timedia, pages 374–382.
Wu, F., Wang, Q., Bian, J., Ding, N., Lu, F., Cheng, J.,
Dou, D., and Xiong, H. (2022). A survey on video
action recognition in sports: Datasets, methods and
applications. IEEE Transactions on Multimedia.
Zahan, S., Hassan, G. M., and Mian, A. (2023). Learn-
ing sparse temporal video mapping for action qual-
ity assessment in floor gymnastics. arXiv preprint
arXiv:2301.06103.
Zhou, X., Xie, L., Huang, Q., Cox, S. J., and Zhang, Y.
(2014). Tennis ball tracking using a two-layered data
association approach. IEEE Transactions on Multime-
dia, 17(2):145–156.
Zhu, K., Wong, A., and McPhee, J. (2022). Fencenet: Fine-
grained footwork recognition in fencing. In Proceed-
ings of the IEEE/CVF Conference on Computer Vision
and Pattern Recognition, pages 3589–3598.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
644
