
FingerSeg: Highly-Efficient Dual-Resolution Architecture for Precise
Finger-Level Semantic Segmentation
Gibran Benitez-Garcia
1 a
and Hiroki Takahashi
1,2,3
1
Graduate School of Informatics and Engineering, The University of Electro-Communications, Japan
2
Artificial Intelligence eXploration Research Center (AIX), The University of Electro-Communications, Japan
3
Meta-Networking Research Center (MEET), The University of Electro-Communications, Japan
Keywords:
Semantic Segmentation, Finger Segmentation, DDRNet, Real-Time CNN, IPN-Hand Dataset.
Abstract:
Semantic segmentation at the finger level poses unique challenges, including the limited pixel representation
of some classes and the complex interdependency of the hand anatomy. In this paper, we propose FingerSeg,
a novel architecture inspired by Deep Dual-Resolution Networks, specifically adapted to address the nuances
of finger-level hand semantic segmentation. To this end, we introduce three modules: Enhanced Bilateral Fu-
sion (EBF), which refines low- and high-resolution feature fusion via attention mechanisms; Multi-Attention
Module (MAM), designed to augment high-level features with a composite of channel, spatial, orientational,
and categorical attention; and Asymmetric Dilated Up-sampling (ADU), which combines standard and asym-
metric atrous convolutions to capture rich contextual information for pixel-level classification. To properly
evaluate our proposal, we introduce IPN-finger, a subset of the IPN-Hand dataset, manually annotated pixel-
wise for 13 finger-related classes. Our extensive empirical analysis, including evaluations of the synthetic
RHD dataset against current state-of-the-art methods, demonstrates that our proposal achieves top results.
FingerSeg reaches 73.8 and 71.1 mIoU on the IPN-Finger and RHD datasets, respectively, while maintaining
an efficient computational cost of about 7 GFLOPs and 6 million parameters at VGA resolution. The dataset,
source code, and a demo of FingerSeg will be available upon the publication of this paper.
1 INTRODUCTION
Hand segmentation represents a dense prediction
problem, focused on identifying each pixel asso-
ciated with a hand in binary segmentation frame-
works (Urooj and Borji, 2018), and in more advanced
applications, distinguishing between left and right
hands (Bandini and Zariffa, 2020). This segmenta-
tion is often a preliminary step in diverse tasks, rang-
ing from hand gesture recognition (HGR) to human
behavior analysis (Dadashzadeh et al., 2019; Lik-
itlersuang et al., 2019; Benitez-Garcia et al., 2021b).
While effective for broad categorization, conventional
left and right hand detection falls short in applications
requiring finer granularity. Specifically, finger-level
segmentation may provide a clearer distinction in ges-
tures, particularly those involving ambiguity between
the number of fingers involved. This level of detail is
crucial for accurately distinguishing between nuanced
gestures, as illustrated in Figure 1, where the standard
a
https://orcid.org/0000-0003-4945-8314
Figure 1: Comparison between gestures based on one and
two fingers. The finger segmentation granularity helps to
determine the number of fingers involved.
hand segmentation can help localize the hand but fails
to determine the number of fingers shown in the ges-
ture. Therefore, in this paper, we propose FingerSeg,
a novel segmentation architecture explicitly designed
for finger-level hand semantic segmentation.
FingerSeg is inspired by the principles of Deep
Dual-Resolution Networks (DDRNet (Pan et al.,
242
Benitez-Garcia, G. and Takahashi, H.
FingerSeg: Highly-Efficient Dual-Resolution Architecture for Precise Finger-Level Semantic Segmentation.
DOI: 10.5220/0012575000003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 3: VISAPP, pages
242-251
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

2022)) and tailored to overcome the unique chal-
lenges posed by finger segmentation, such as the
limited pixel area of certain fingers and the com-
plex spatial relationships within hand anatomy. Fin-
gerSeg introduces advanced feature fusion and atten-
tion mechanisms to capture the subtle distinctions be-
tween fingers. This enhanced granularity in segmen-
tation is not only crucial for applications in HGR and
sign language recognition but also holds significant
promise in medical fields, where precise hand and
finger movements are essential (Rangesh and Trivedi,
2018; Likitlersuang et al., 2019).
Efficiency in computation is essential when in-
tegrating finger segmentation into real-time applica-
tions. The demand for lightweight models to ensure
prompt and responsive performance is paramount. In
this way, DDRNet offers an efficient architecture op-
timized for speed and accuracy. However, it does not
inherently address the mentioned challenges of finger
segmentation. To bridge this gap, we propose three
novel modules that do not impose excessive computa-
tional costs. Our proposal includes the Enhanced Bi-
lateral Fusion (EBF), which improves feature merg-
ing precision; the Multi-Attention Module (MAM),
which provides nuanced processing of features; and
the Asymmetric Dilated Up-sampling (ADU), which
enhances feature resolution effectively. Each module
is carefully designed to contribute to the overall ef-
ficacy, ensuring that FingerSeg remains highly effi-
cient while setting new standards in segmentation de-
tail and accuracy.
To thoroughly evaluate the capabilities of Fin-
gerSeg, we introduce IPN-finger, a curated subset of
the IPN-Hand dataset for HGR (Benitez-Garcia et al.,
2021a). Specifically, we defined 13 finger-related
classes and manually annotated 1000 frames at pixel
level. Moreover, our evaluation extends to the Ren-
dered Hand Pose Dataset (RHD) (Zimmermann and
Brox, 2017), which, to the best of our knowledge,
is the only publicly available dataset offering finger-
level pixel-wise annotations. Thus, including real-
world samples of the IPN-finger dataset serves as a
critical benchmark to validate the precision and effec-
tiveness of finger segmentation approaches.
In our experimental analysis, FingerSeg not only
demonstrates an exceptional balance between accu-
racy and computational efficiency but also presents
a significant improvement over our baseline model.
Specifically, FingerSeg overcomes DDRNet by ap-
proximately 3%, achieving a mIoU of 73.8 on the
IPN-Finger dataset. FingerSeg demands only about 7
GFLOPs and 6 million parameters for a 640x480 im-
age resolution, which allows faster than real-time per-
formance across different platforms. Consequently,
FingerSeg presents a valuable solution for finger seg-
mentation, serving as an efficient preprocessing step
and a robust framework for real-time applications.
The main contributions are summarized as fol-
lows:
• Introduction of FingerSeg, an architecture specif-
ically designed for efficient and accurate finger-
level hand segmentation.
• Development and integration of three novel mod-
ules: Enhanced Bilateral Fusion (EBF), Multi-
Attention Module (MAM), and Asymmetric Di-
lated Up-sampling (ADU), to achieve state-of-
the-art results with minimal computational cost
increase.
• Compilation of the IPN-Finger dataset, com-
prising 1000 frames with pixel-wise annotations
across 13 classes, including the palm, all fingers
of each hand, and the overall shape of the person.
• Superior performance of FingerSeg with results of
approximately 73.8 and 71.1 mIoU on the IPN-
Finger and RHD datasets, respectively, surpassing
real-time semantic segmentation approaches, in-
cluding notable methods like DDRNet (Pan et al.,
2022) and PIDNet (Xu et al., 2023).
2 RELATED WORK
2.1 Hand Segmentation
Hand segmentation has been an active research topic
in recent years, with significant implications for di-
verse applications. Notable among these are hand
gesture recognition (HGR), RGB-based hand pose
estimation, and the analysis of egocentric interac-
tions (Bandini and Zariffa, 2020).
Segmentation serves as a preprocessing step for
HGR, enhancing subsequent processes like classifi-
cation. Studies such as (Dadashzadeh et al., 2019)
and (Benitez-Garcia et al., 2021b) have illustrated
how effective segmentation can boost the accuracy of
HGR systems. Binary segmentation, in particular, has
been a staple in preprocessing for hand pose estima-
tion. For instance, HandSegNet (Zimmermann and
Brox, 2017) underpins the 3D hand pose estimation
from RGB frames. Likewise, the end-to-end train-
able framework proposed in (Baek et al., 2019) uti-
lizes segmentation masks to facilitate 3D hand pose
reconstructions from 2D joint estimations.
In the context of egocentric vision, robust hand
segmentation has proven critical for action and ac-
tivity recognition involving hands. This has led to
the development of methods that rely on accurate
FingerSeg: Highly-Efficient Dual-Resolution Architecture for Precise Finger-Level Semantic Segmentation
243

hand segmentation as a precursor to activity recog-
nition (Li et al., 2019). A significant advancement in
binary hand segmentation is presented in (Cai et al.,
2020), which showcases a Bayesian CNN framework
enhancing generalizability across diverse domains.
However, a noticeable gap in the existing litera-
ture is the lack of focus on hand segmentation with
the granularity necessary to distinguish individual fin-
gers. This paper seeks to fill that gap by introduc-
ing an approach specifically designed for this pur-
pose, extending the scope and applicability of hand
segmentation in computational vision.
2.2 Real-Time Semantic Segmentation
Advanced semantic segmentation techniques typi-
cally depend on preserving high-resolution features
while implementing convolutions with extensive di-
lation rates to broaden receptive fields, as seen
in methods like PSPNet (Zhao et al., 2017) and
DeepLabV3+ (Chen et al., 2018). Despite their high
accuracy, the computational intensity and complex
pooling mechanisms of these methods often prohibit
real-time performance.
In contrast, real-time segmentation algorithms
consider more efficient architectures, such as
lightweight encoder-decoder or bilateral pathway de-
signs. These often incorporate compact pyramidal
pooling and depth-wise convolutions. DABNet (Li
and Kim, 2019), for example, leverages Depth-
wise Asymmetric Bottleneck modules, which com-
bine factorized depth-wise convolutions in a bottle-
neck structure to extract local and contextual infor-
mation jointly, obviating the need for extensive pool-
ing modules. Other approaches like HardNet (Chao
et al., 2019) and FASSDNet (Rosas-Arias et al., 2021)
use classic encoder-decoder architectures relying on
Harmonic Dense Blocks. These blocks are engi-
neered to reduce memory usage and computational
density, addressing the challenges of the dense blocks
proposed by DenseNet. On the other hand, a sig-
nificant development in real-time semantic segmen-
tation is DDRNet (Pan et al., 2022), which intro-
duces a dual-resolution backbone comprising low-
and high-resolution branches with a one-to-one corre-
lation between paths. This includes bilateral connec-
tions to foster efficient information exchange between
context (low-resolution) and detail (high-resolution)
branches. More recently, PIDNet (Xu et al., 2023)
advances the field with a three-branch network archi-
tecture. This design parses detailed, contextual, and
boundary information through separate branches, uti-
lizing boundary attention to guide the fusion of de-
tailed and contextual information.
Our choice of DDRNet as a baseline derives from
its efficient dual-resolution approach and the potential
for enhancements in finger-level segmentation. This
framework allows for an optimal balance between de-
tail capture and computational efficiency, making it
an ideal foundation for our FingerSeg model.
3 FINGERSEG NETWORK
The proposed architecture for finger-level hand seg-
mentation is designed to address the specific chal-
lenges inherent in this task. Our methodology is in-
spired by the efficient architecture of DDRNet, which
we have significantly adapted and enhanced to cater
to the nuanced requirements of segmenting individ-
ual fingers. At the core of FingerSeg are three key
modules: Enhanced Bilateral Fusion (EBF), Multi-
Attention Module (MAM), and Asymmetric Dilated
Up-sampling (ADU). Each of these modules plays
a pivotal role in refining the segmentation process,
ensuring both high accuracy and computational effi-
ciency. In the following sections, we delve into the
intricacies of these modules, explaining how they col-
lectively contribute to the superior performance of
FingerSeg in finger-level segmentation tasks.
3.1 Network Overview
FingerSeg’s architecture, as illustrated in Figure 2,
is built upon a dual-resolution backbone that bifur-
cates from a single trunk into two parallel branches,
each operating at a distinct resolution. The high-
resolution branch aims to generate detailed feature
maps at 1/8 the resolution of the input image. No-
tably, this branch excludes any downsampling opera-
tions to preserve high-resolution information, main-
taining a one-to-one correspondence with the low-
resolution branch to form deep, detailed representa-
tions. Conversely, the low-resolution branch, akin to
DDRNet’s design, employs multiple downsampling
operations within its Residual Blocks (RB) to produce
feature maps at a reduced 1/64 resolution. This struc-
ture not only captures rich contextual information but
also contributes to the network’s overall efficiency.
EBF blocks are employed to integrate detailed and
contextual features at two critical points within the ar-
chitecture. Additionally, the end of the low-resolution
pathway incorporates the Deep Aggregation Pyra-
mid Pooling Module (DAPPM), as utilized in DDR-
Net (Pan et al., 2022). The DAPPM enriches se-
mantic information without compromising inference
speed by processing lower-resolution feature maps. It
operates on feature maps at a 1/64 resolution, utiliz-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
244
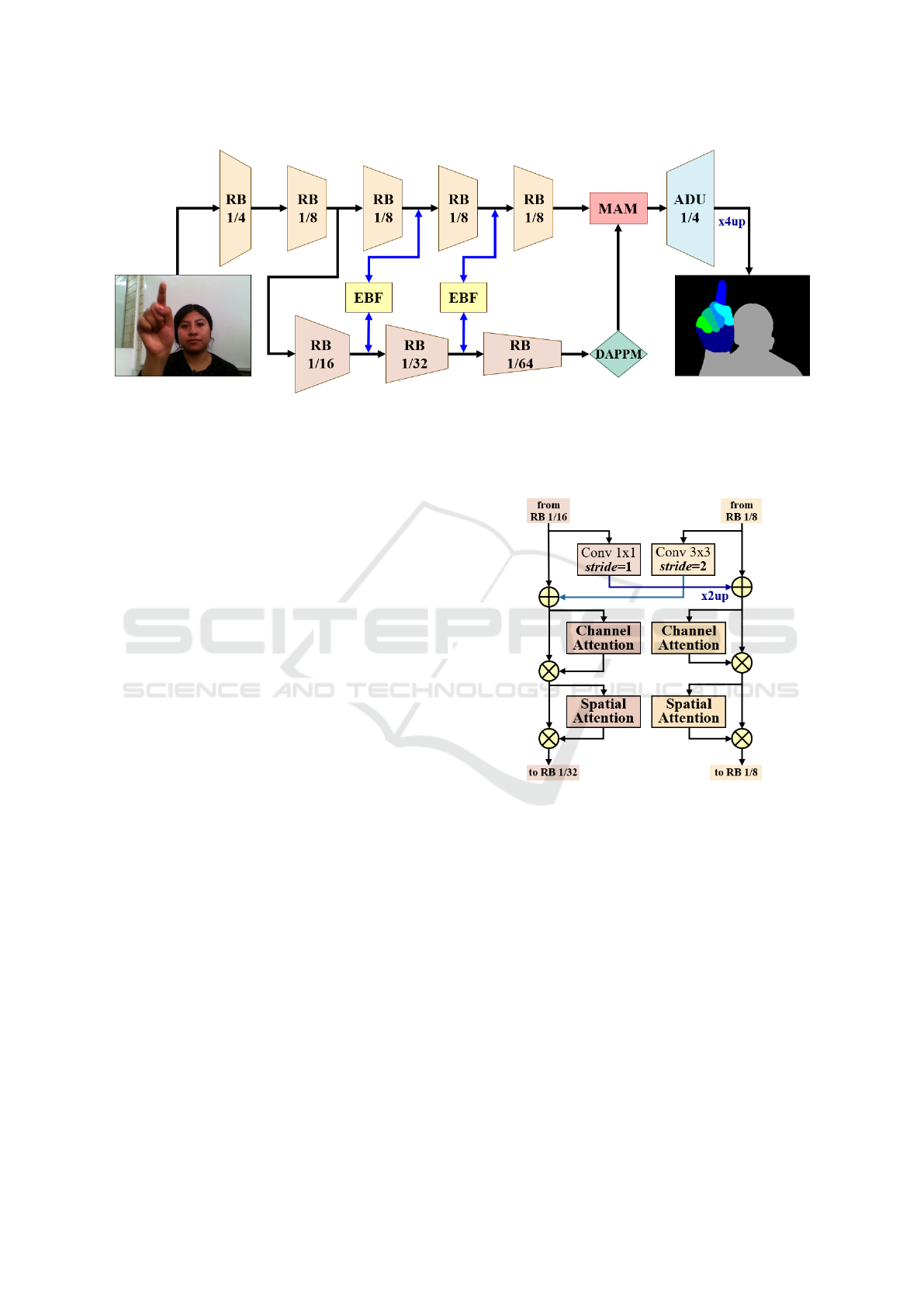
Figure 2: Overview of the FingerSeg architecture. The dual-resolution network starts as a single trunk and divides into two
branches: the high-resolution branch (top) and the low-resolution branch (bottom). Enhanced Bilateral Fusion (EBF) blocks
facilitate the integration of detailed and contextual features. The Deep Aggregation Pyramid Pooling Module (DAPPM) at
the end of the low-resolution branch enriches semantic information. Feature maps are then refined by the Multi-Attention
Module (MAM) and upsampled by the Asymmetric Dilated Up-sampling (ADU) module for final segmentation.
ing large pooling kernels to create multi-scale feature
maps, and incorporates global average pooling for ad-
ditional image-level detail. A cascading fusion strat-
egy involving successive upsampling and 3×3 convo-
lutions is applied to integrate varying scales of fea-
tures, which are then unified and compacted using a
1×1 convolution.
Subsequently, the refined outputs from the
DAPPM and the high-resolution branch converge
within our MAM block before being upsampled by
the ADU module, leading to the final segmentation
prediction. The segmentation scores are subsequently
upscaled using bilinear interpolation, aligning with
the supervision of a standard cross-entropy loss func-
tion. The forthcoming subsections will delve into the
specifics of the proposed modules.
3.2 EBF: Enhanced Bilateral Fusion
The EBF block, depicted in Figure 3, is designed
to effectively merge high-resolution detail with low-
resolution context features. High-to-low resolution
features undergo a transformation involving channel
expansion and spatial reduction through a 3x3 convo-
lution with a stride of 2. Concurrently, low-to-high
resolution features are channel-wise compacted using
a 1x1 convolution and subsequently spatially enlarged
via bilinear interpolation (x2up).
Once the feature maps from both resolutions are
matched in spatial and channel dimensions, they are
combined through element-wise addition. Building
upon the concept introduced by CBAM (Woo et al.,
2018), we further refine the fused features by apply-
ing channel and spatial attention mechanisms to each
respective branch. This dual attention schema ensures
Figure 3: The structure of the Enhanced Bilateral Fusion
(EBF) block.
that the most relevant features are emphasized, en-
hancing the quality of the subsequent feature repre-
sentations for the precise segmentation tasks at hand.
3.3 MAM: Multi-Attention Module
The Multi-Attention Module (MAM), as shown in
Figure 4, is crucial in refining the feature fusion pro-
cess within FingerSeg. It starts by upscaling the out-
put feature maps from the DAPPM using bilinear in-
terpolation to match the spatial dimensions of the
high-resolution feature maps. These aligned feature
maps are then combined via element-wise summa-
tion. This fusion sets the stage for a series of spe-
cialized attention mechanisms, extending beyond the
scope of CBAM to address the unique challenges of
FingerSeg: Highly-Efficient Dual-Resolution Architecture for Precise Finger-Level Semantic Segmentation
245
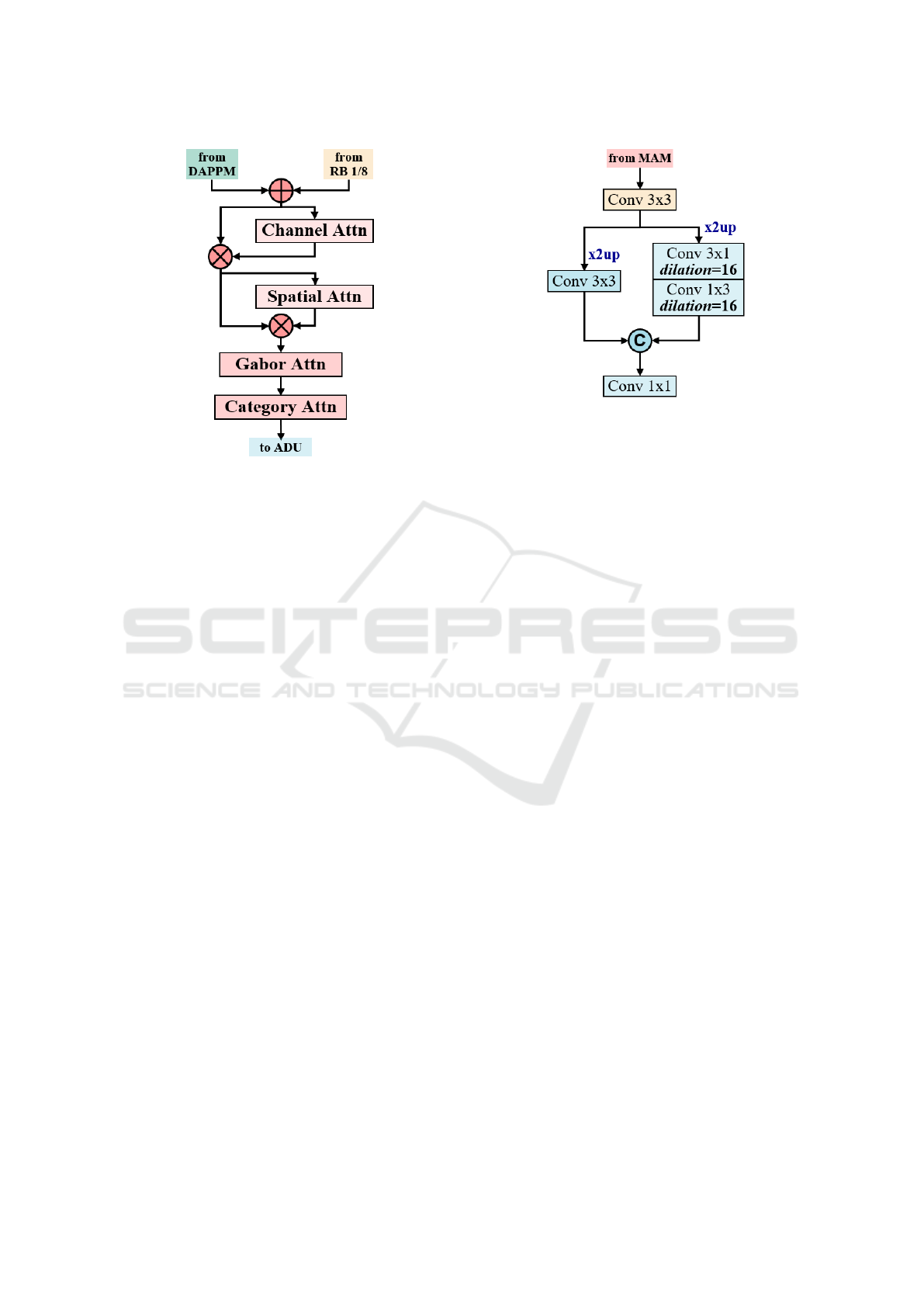
Figure 4: Configuration of the Multi-Attention Module
(MAM).
finger segmentation.
We employ a Gabor Attention mecha-
nism (Richards et al., 2022) after channel and
spatial attention, specifically designed to be robust
to the orientation of features. This mechanism
utilizes Gabor-modulated convolutions, where con-
volutional weights are multiplied by Gabor filters
across different rotation parameters to generate
orientation-sensitive feature representations. The
Gabor Attention then calculates correlations along
the orientation axis, which are crucial for interpreting
the diverse positioning of fingers.
Further, the Category Attention Block (CAB) (He
et al., 2020) is integrated to address the challenges
associated with the imbalanced data characteristic of
finger segmentation, where pixel representation of
different fingers varies significantly. The Category
Attention of CAB operates in a class-specific man-
ner, allocating an equal number of feature channels to
each class. Thus, it mitigates channel bias and ampli-
fies inter-class feature distinction, ensuring each cate-
gory receives equal treatment.
MAM’s strategy, which includes channel, spatial,
orientational, and categorical attention, fortifies the
feature richness. This robustness is essential for Fin-
gerSeg’s capability to accurately segment fingers in
varying poses and alignments, which is critical for the
following ADU block and final segmentation process.
Figure 5: Schematic representation of the Asymmetric Di-
lated Up-sampling (ADU) block.
3.4 ADU: Asymmetric Dilated
Up-Sampling
As shown in Figure 5, the process of ADU begins
with a 3×3 convolution that further refines the fea-
ture maps received from MAM. After this initial re-
finement, two pathways are used to process the fea-
tures in parallel. One branch utilizes asymmetric con-
volutions with dilation to effectively capture contex-
tual information from the feature maps, which have
been previously upsampled using bilinear interpola-
tion. This branch’s dilated convolutions enable a
broader receptive field, facilitating the assimilation of
context without loss of resolution. Simultaneously,
the second branch, employing a direct upsampling
approach without dilation, concentrates on learning
fine-grained details to enhance the spatial resolution
of the features. The outputs of both branches are then
concatenated, providing a composite feature map that
embodies contextual and detailed attributes.
The concatenated feature maps undergo a final
1x1 convolution for the pixel-level classification. This
fusion of asymmetric dilation and direct detail learn-
ing in the ADU block optimizes the balance between
contextual understanding and detail preservation, a
critical aspect for accurately segmenting fingers.
4 IPN-FINGER DATASET
The scarcity of hand datasets offering annotations be-
yond binary pixel labels presents a significant chal-
lenge in advancing hand segmentation research. For
instance, EgoHands (Bambach et al., 2015) offers
pixel-wise annotations for activity recognition across
four classes, limited to distinguishing only between
the user’s and others’ left and right hands. Simi-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
246

Figure 6: Class labels in the IPN-Finger dataset.
larly, the dataset from (Benitez-Garcia et al., 2021b)
provides annotations for 500 frames of left and right
hands, targeted at touchless screen interactions. The
WorkingHands dataset (Kim et al., 2020) is another
substantial contribution, featuring over 400 thousand
frames of thermally and RGB-D captured ”hands us-
ing tools.” However, these datasets do not address
finger-level granularity. On the other hand, to the best
of our knowledge, the Rendered Hand Pose Dataset
(RHD) (Zimmermann and Brox, 2017) is the only
publicly available dataset with finger-level pixel-wise
annotations, comprising 43,986 synthetically gener-
ated images.
To fill the void of real-world, finger-specific an-
notations, we have extended the IPN-Hand dataset
with finger-level semantic annotations. The IPN-
Hand dataset, known for capturing genuine interac-
tions with touchless screens, was the ideal candidate
for this subset. We selected 1000 frames showcas-
ing a range of finger positions, spanning the 13 static
and dynamic gestures and the variety of the 28 scenes
and backgrounds present in the dataset. This sub-
set, dubbed IPN-Finger, represents samples from 50
different subjects and defines 13 classes that com-
prise the palms, all fingers on each hand, and the per-
son’s shape. Figure 6 provides a visual guide to these
classes. The annotation was performed manually us-
ing the LabelMe toolbox (Russell et al., 2008), ensur-
ing precise and comprehensive pixel-level labeling.
4.1 Dataset Statistics
The IPN-Finger dataset exhibits a considerable class
imbalance in terms of the frequency of class appear-
ances across images and the pixel area occupied by
each class, as shown in Table 1. The table also high-
lights the pixel area covered by each class, given a
standard image size of 640x480 pixels, where the area
percentage reflects the proportion of the image that a
class occupies. From this table, we can see that obvi-
ously, the ’person’ class is the most prevalent, appear-
ing in all 1000 images and covering 26.45% of the
Table 1: Distribution of classes across the dataset.
Class Images Area (%) Area (pix.)
person 1000 26.45 285
2
l thumb 61 0.34 32
2
l palm 107 1.30 63
2
l index 77 0.34 32
2
l medium 90 0.39 35
2
l ring 97 0.37 34
2
l pinky 96 0.28 29
2
r thumb 729 0.55 41
2
r palm 853 1.59 70
2
r index 840 0.60 43
2
r medium 851 0.66 45
2
image area on average. Conversely, the classes rep-
resenting individual fingers occupy significantly less
space, with most covering less than 1% of the image
area. Notably, the left pinky class (’l pinky’) is the
least represented in terms of area, averaging an area
of approximately 29x29 pixels.
This imbalance extends to the visibility of hands
within the images: the left hand is notably less
present, appearing in fewer than 110 images. Such
disparities underscore the challenges of finger seg-
mentation, specifically in training robust models ca-
pable of accurately segmenting classes of varying
pixel representations and frequencies. The stark con-
trast between the dataset’s most and least represented
classes accentuates the necessity of a model like Fin-
gerSeg, which is adept at handling the intricacies of
finger-level segmentation within this uneven scenario.
5 EXPERIMENTAL RESULTS
5.1 Datasets
To assess the performance of our FingerSeg architec-
ture and compare it with state-of-the-art methods, we
evaluated two datasets: our IPN-Finger and the pub-
licly available RHD dataset (Zimmermann and Brox,
2017).
For the IPN-Finger dataset, we randomly chose
a fixed subset of 850 images for training and 150
for testing. To address the challenge of class repre-
sentation imbalance across images, we expanded the
dataset offline by mirroring each image, effectively
doubling the number of images for training and test-
ing to 1700 and 300, respectively. The RHD dataset’s
standard data split was employed, comprising 41,258
images for training and 2,728 for testing. It is impor-
tant to note that the RHD dataset’s original annota-
tions span 31 classes, reflecting individual finger pha-
FingerSeg: Highly-Efficient Dual-Resolution Architecture for Precise Finger-Level Semantic Segmentation
247
langes. We consolidated these annotations into the
same 13 classes defined for our evaluation.
5.2 Implementation Details
All experiments were conducted using Python 3.7.16
and PyTorch 1.10.2, with CUDA 12.0 acceleration,
on an Intel Core i7-9700K desktop paired with an
Nvidia RTX 2080Ti GPU. To ensure a fair compar-
ison among all evaluated models, we standardized
the training settings across the board. The Stochas-
tic Gradient Descent (SGD) algorithm was employed
as the optimizer for all models, in conjunction with a
cross-entropy loss function as suggested by the online
bootstrapping strategy (Wu et al., 2016).
Data augmentation techniques were uniformly ap-
plied to each dataset, including random horizon-
tal flips, random scaling, and random cropping to
480x480 size. Before augmentation, images from
both datasets were upscaled to a uniform resolution
of 640x640 pixels. However, for testing, images were
evaluated at their native 640x480 resolution without
cropping. Each model was trained with a batch size of
32 images. Specifically for the RHD dataset, models
were trained from scratch over 60,000 iterations. In
contrast, for the IPN-Finger dataset, we fine-tuned the
models pre-trained on RHD for an additional 35,000
iterations.
5.3 Ablation Study
The efficacy of segmentation models is traditionally
measured by the mean intersection-over-union accu-
racy (mIoU). Alongside mIoU, we also provide in-
sights into the model complexity by reporting the
number of parameters and computational cost mea-
sured in GFLOPs.
This ablation study dissects the incremental con-
tributions of the proposed modules integrated into the
DDRNet architecture. Our baseline is the DDRNet23
slim variant (Pan et al., 2022), which comprises 5.73
million parameters with a computational cost of 5.55
GFLOPs. We systematically enhance this baseline
by sequentially incorporating our proposed modules.
The results of this study are shown in Table 2.
The addition of each module demonstrates a sig-
nificant improvement in mIoU, as illustrated in Ta-
ble 2. The full implementation of our FingerSeg
model, which includes all three modules, shows a
mIoU of 73.79, outperforming the baseline by a sig-
nificant margin. It is noteworthy that FingerSeg
achieves these results with only a moderate increase
in parameters and GFLOPs.
We also compare FingerSeg against the more
Table 2: Ablation study showing the enhancements of
the proposed modules compared with the baseline (DDR-
Net23 slim), including the complex DDRNet23 full for ref-
erence. Results on the IPN-Finger dataset.
Method Params GFLOPs mIoU
DDRNet23 slim 5.73M 5.55 70.70
+EBF 5.84M 5.56 71.21
+EBF+MAM 6.15M 6.31 72.52
+EBF+MAM+ADU
(FingerSeg)
6.20M 7.30 73.79
DDRNet23 full 20.30M 21.79 74.37
complex DDRNet23 full model for a broader perspec-
tive. Although the full model has nearly triple the pa-
rameters and computational complexity of FingerSeg,
the improvement in mIoU is marginal. Specifically,
the DDRNet23 full model registers a mIoU of 74.37,
a modest increment over FingerSeg’s 73.79 mIoU.
FingerSeg’s design strategy demonstrates that strate-
gic module enhancements can yield near-comparable
accuracy while significantly reducing the computa-
tional burden of more complex models. This under-
scores the effectiveness of each integrated module in
FingerSeg and emphasizes the model’s capacity to
achieve high-level accuracy with a more efficient use
of resources.
5.4 Per-Class Analysis
The task of finger segmentation poses varying de-
grees of difficulty across different classes, mainly due
to the size and frequency of occurrence of each fin-
ger within the dataset. Our analysis, detailed in Ta-
ble 3, suggests that the smaller fingers, particularly
the left pinky—the least represented class—pose the
most significant challenge.
When examining the performance metrics, it is ev-
ident that our FingerSeg model outperforms the base-
line DDRNet23 slim, especially in the classes where
size and representation pose a challenge. Notably,
FingerSeg achieves a significant improvement in the
segmentation of the left palm, with an increase in ac-
curacy from 68.6 to 73.1 mIoU, indicating a promi-
nent enhancement in distinguishing this particular re-
gion compared to the baseline. On the other hand,
the left pinky, being the smallest and least represented
class, shows no critical increase from the baseline per-
formance. Another point of interest is the anoma-
lously low accuracy for the right palm in DDRNet’s
results, which FingerSeg effectively addresses, im-
proving accuracy by over 20 percentage points.
Figure 7 offers visual insights into the perfor-
mance improvements by illustrating qualitative com-
parisons between FingerSeg and the baseline DDR-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
248

Table 3: FingerSeg per-class mIoU comparison with the baseline on the IPN-Finger dataset.
Method l thu l pal l ind l med l rin l pin r thu r pal r ind r med r rin r pin
DDRNet 69.8 68.6 67.6 71.2 68.3 67.4 69.4 53.7 68.2 70.4 67.3 67.9
FingerSeg 69.9 73.1 71.2 69.4 67.8 67.5 69.8 75.6 70.8 71.4 67.7 68.3
Table 4: Comparative analysis of FingerSeg and state-of-the-art semantic segmentation methods on the IPN and RHD datasets.
Method Params (M) GFLOPs mIoU (IPN) mIoU (RHD)
FastSCNN (Poudel et al., 2019) 1.134 1.03 64.66 55.05
DABNet (Li and Kim, 2019) 0.755 6.12 64.26 61.22
FC-HarDNet (Chao et al., 2019) 4.119 5.19 68.93 68.59
FASSDNet (Rosas-Arias et al., 2021) 2.845 6.60 69.58 68.50
DDRNet23 slim (Pan et al., 2022) 5.734 5.55 70.70 69.03
PIDNet (Xu et al., 2023) 7.625 7.20 71.98 70.91
FingerSeg 6.196 7.30 73.79 71.15
Figure 7: Qualitative comparison of DDRNet (baseline) vs.
FingerSeg.
Net on test images from the IPN-finger dataset. The
third row particularly tells that DDRNet erroneously
classifies skin regions as part of the right and left
palms, a significant error that underscores difficulties
in discerning hand anatomy. Moreover, the baseline
occasionally misclassifies objects and background el-
ements with hands, suggesting limitations in its dual-
resolution architecture when learning fine anatomi-
cal structures. In stark contrast, FingerSeg exhibits
no such classification errors, reinforcing the notion
that our integrated modules considerably enhance the
model’s ability to segment and differentiate hand and
finger regions accurately.
In general, FingerSeg consistently maintains or
improves upon the baseline accuracies, affirming the
effectiveness of the integrated modules tailored to ad-
dress the intricacies of finger segmentation. This
per-class improvement demonstrates that FingerSeg
is well-suited for the detailed task at hand, capable
of precisely discerning between closely situated and
similarly sized classes.
5.5 Comparisons with State-of-the-Art
Approaches
The comparative analysis shown in Table 4 showcases
the performance of FingerSeg against several leading
semantic segmentation models: FastSCNN (Poudel
et al., 2019), DABNet (Li and Kim, 2019), FC-
HardNet (Chao et al., 2019), FASSDNet (Rosas-
Arias et al., 2021), DDRNet (Pan et al., 2022),
and PIDNet (Xu et al., 2023). Notably, FingerSeg
achieves the highest mIoU scores on both the IPN
and RHD datasets, reaching 73.79 and 71.15, respec-
tively. This marks a substantial improvement over
other approaches while maintaining competitive com-
putational efficiency.
FastSCNN, while being the most computationally
lightweight model with only 1.03 GFLOPs, falls short
in mIoU performance. DABNet offers the lowest pa-
rameter count at 0.755 million, yet its mIoU scores do
not compete with FingerSeg, emphasizing the latter’s
superior balance of model complexity and segmenta-
tion capability. FC-HarDNet and FASSDNet present
themselves as intermediate options in terms of param-
eters and GFLOPs. While these models offer compet-
itive mIoU scores, particularly FC-HarDNet’s perfor-
mance on the RHD dataset, they still do not reach the
benchmark set by FingerSeg.
Our baseline model, DDRNet, demonstrates ro-
bust performance with a mIoU of 70.70 on IPN
and 69.03 on RHD. However, PIDNet, one of the
FingerSeg: Highly-Efficient Dual-Resolution Architecture for Precise Finger-Level Semantic Segmentation
249

most recent models, stands out with high mIoU
scores of 71.98 and 70.91 on the IPN and RHD
datasets, respectively. Yet, FingerSeg overcomes
PIDNet in accuracy while requiring fewer parameters.
The GFLOPs of FingerSeg and PIDNet are closely
matched, underscoring FingerSeg’s architectural opti-
mizations that allow for high accuracy without a sub-
stantial increase in computational demand.
In summary, FingerSeg sets new standards in seg-
mentation accuracy and exhibits a notorious balance
between computational requirements and model com-
plexity. This performance is particularly important
given the fine-grained nature of the finger segmenta-
tion task, proving the worth of FingerSeg’s design.
6 CONCLUSIONS AND FUTURE
WORK
In this paper, we introduced FingerSeg as an advanced
solution for finger-level hand segmentation. Through
meticulous design and the integration of specialized
modules (EBF, MAM, and ADU), FingerSeg has
demonstrated a significant leap forward in the accu-
racy and efficiency of semantic segmentation for nu-
anced hand gestures. The empirical results, bolstered
by thorough ablation studies and comparisons with
state-of-the-art methods, affirm FingerSeg’s standing
as a leading solution to the presented task. More-
over, the creation and annotation of the IPN-Finger
dataset have not only facilitated the development of
FingerSeg but also enriched the resources available to
the research community. By offering this dataset pub-
licly, alongside the FingerSeg model, we anticipate
stimulating further innovation and exploration in the
detailed segmentation of hands and fingers.
Looking ahead, the integration of FingerSeg into
multimodal hand gesture recognition (HGR) systems
presents promising future work. Its application as an
additional modality can potentially enrich the inter-
pretative capabilities of HGR, particularly in complex
or nuanced scenarios. Exploring the synergy between
FingerSeg’s detailed segmentation and other modali-
ties will be instrumental in developing more intuitive
and natural user interfaces, contributing significantly
to advancements in human-computer interaction.
ACKNOWLEDGEMENTS
This work is supported by a Research Grant (S) at
Tateisi Science and Technology Foundation.
REFERENCES
Baek, S., Kim, K. I., and Kim, T.-K. (2019). Pushing the
envelope for rgb-based dense 3d hand pose estimation
via neural rendering. In The IEEE/CVF Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 1067–1076.
Bambach, S., Lee, S., Crandall, D. J., and Yu, C. (2015).
Lending a hand: Detecting hands and recognizing ac-
tivities in complex egocentric interactions. In The
IEEE International Conference on Computer Vision
(ICCV), pages 1949–1957.
Bandini, A. and Zariffa, J. (2020). Analysis of the hands
in egocentric vision: A survey. IEEE transactions on
pattern analysis and machine intelligence.
Benitez-Garcia, G., Olivares-Mercado, J., Sanchez-Perez,
G., and Yanai, K. (2021a). Ipn hand: A video dataset
and benchmark for real-time continuous hand gesture
recognition. In 2020 25th international conference on
pattern recognition (ICPR), pages 4340–4347. IEEE.
Benitez-Garcia, G., Prudente-Tixteco, L., Castro-Madrid,
L. C., Toscano-Medina, R., Olivares-Mercado, J.,
Sanchez-Perez, G., and Villalba, L. J. G. (2021b). Im-
proving real-time hand gesture recognition with se-
mantic segmentation. Sensors, 21(2):356.
Cai, M., Lu, F., and Sato, Y. (2020). Generalizing hand
segmentation in egocentric videos with uncertainty-
guided model adaptation. In The IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 14392–14401.
Chao, P., Kao, C.-Y., Ruan, Y.-S., Huang, C.-H., and Lin,
Y.-L. (2019). HarDNet: A Low Memory Traffic Net-
work. In The IEEE International Conference on Com-
puter Vision (ICCV).
Chen, L.-C., Zhu, Y., Papandreou, G., Schroff, F., and
Adam, H. (2018). Encoder-decoder with atrous sep-
arable convolution for semantic image segmentation.
In The European Conference on Computer Vision
(ECCV), pages 801–818.
Dadashzadeh, A., Targhi, A. T., Tahmasbi, M., and Mirme-
hdi, M. (2019). Hgr-net: a fusion network for hand
gesture segmentation and recognition. IET Computer
Vision, 13(8):700–707.
He, A., Li, T., Li, N., Wang, K., and Fu, H. (2020). Cab-
net: Category attention block for imbalanced diabetic
retinopathy grading. IEEE Transactions on Medical
Imaging, 40(1):143–153.
Kim, S., Chi, H.-g., Hu, X., Vegesana, A., and Ramani, K.
(2020). First-person view hand segmentation of multi-
modal hand activity video dataset. In British Machine
Vision Conference (BMVC).
Li, G. and Kim, J. (2019). DABNet: Depth-wise Asymmet-
ric Bottleneck for Real-time Semantic Segmentation.
In British Machine Vision Conference (BMVC).
Li, M., Sun, L., and Huo, Q. (2019). Flow-guided feature
propagation with occlusion aware detail enhancement
for hand segmentation in egocentric videos. Computer
Vision and Image Understanding, 187:102785.
Likitlersuang, J., Sumitro, E. R., Cao, T., Vis
´
ee, R. J., Kalsi-
Ryan, S., and Zariffa, J. (2019). Egocentric video: a
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
250

new tool for capturing hand use of individuals with
spinal cord injury at home. Journal of neuroengineer-
ing and rehabilitation, 16(1):1–11.
Pan, H., Hong, Y., Sun, W., and Jia, Y. (2022). Deep dual-
resolution networks for real-time and accurate seman-
tic segmentation of traffic scenes. IEEE Transactions
on Intelligent Transportation Systems, 24(3):3448–
3460.
Poudel, R. P., Liwicki, S., and Cipolla, R. (2019). Fast-
scnn: fast semantic segmentation network. In British
Machine Vision Conference (BMVC).
Rangesh, A. and Trivedi, M. M. (2018). Handynet: A one-
stop solution to detect, segment, localize & analyze
driver hands. In The IEEE Conference on Computer
Vision and Pattern Recognition Workshops (CVPRW),
pages 1103–1110.
Richards, F., Xie, X., Paiement, A., Sola, E., and Duc, P.-A.
(2022). Multi-scale gridded gabor attention for cirrus
segmentation. In 2022 IEEE International Conference
on Image Processing (ICIP), pages 3733–3737. IEEE.
Rosas-Arias, L., Benitez-Garcia, G., Portillo-Portillo, J.,
Olivares-Mercado, J., Sanchez-Perez, G., and Yanai,
K. (2021). Fassd-net: Fast and accurate real-time se-
mantic segmentation for embedded systems. IEEE
Transactions on Intelligent Transportation Systems,
23(9):14349–14360.
Russell, B. C., Torralba, A., Murphy, K. P., and Freeman,
W. T. (2008). Labelme: a database and web-based
tool for image annotation. International journal of
computer vision, 77(1-3):157–173.
Urooj, A. and Borji, A. (2018). Analysis of hand segmenta-
tion in the wild. In The IEEE Conference on Computer
Vision and Pattern Recognition (CVPR), pages 4710–
4719.
Woo, S., Park, J., Lee, J.-Y., and Kweon, I. S. (2018). Cbam:
Convolutional block attention module. In Proceed-
ings of the European conference on computer vision
(ECCV), pages 3–19.
Wu, Z., Shen, C., and Hengel, A. v. d. (2016).
High-performance semantic segmentation using very
deep fully convolutional networks. arXiv preprint
arXiv:1604.04339.
Xu, J., Xiong, Z., and Bhattacharyya, S. P. (2023). Pidnet:
A real-time semantic segmentation network inspired
by pid controllers. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recogni-
tion, pages 19529–19539.
Zhao, H., Shi, J., Qi, X., Wang, X., and Jia, J. (2017). Pyra-
mid Scene Parsing Network. In The IEEE Conference
on Computer Vision and Pattern Recognition (CVPR).
Zimmermann, C. and Brox, T. (2017). Learning to estimate
3d hand pose from single rgb images. In The IEEE
International Conference on Computer Vision (ICCV),
pages 4903–4911.
FingerSeg: Highly-Efficient Dual-Resolution Architecture for Precise Finger-Level Semantic Segmentation
251
