Unsupervised Domain Adaptation for Human Pose Action Recognition
Mattias Billast
1 a
, Tom De Schepper
1,2 b
and Kevin Mets
3 c
1
University of Antwerp, Imec, IDLab, Department of Computer Science, Sint-Pietersvliet 7, 2000 Antwerp, Belgium
2
AI & Data Department, Imec, Leuven, Belgium
3
University of Antwerp Imec, IDLab, Faculty of Applied Engineering, Sint-Pietersvliet 7, 2000 Antwerp, Belgium
Keywords:
Domain Adaptation, Human Pose, GCN, Action Recognition.
Abstract:
Personalized human action recognition is important to give accurate feedback about motion patterns, but there
is likely no labeled data available to update the model in a supervised way. Unsupervised domain adaptation
can solve this problem by closing the gap between seen data and new unseen users. We test several domain
adaptation techniques and compare them with each other on this task. We show that all tested techniques
improve on the model without any domain adaptation and are only trained on labeled source data. We add
multiple improvements by designing a better feature representation tailored to the new user. These improve-
ments include added contrastive loss and varying the backbone encoder. We would need between 30% and
40% labeled data of the new user to get the same results.
1 INTRODUCTION
Human action recognition is essential to give per-
sonal feedback about body motions. It has appli-
cations in health, industry, and gaming (Pareek and
Thakkar, 2021). Examples are monitoring a user’s
health by their behavior, gesture recognition in gam-
ing, and faster and safer human-robot interactions.
Models are often trained on very large datasets but
we focus on new unseen subjects to immediately have
high-performant personalised models. Action recog-
nition on human pose data assigns action classes to a
sample of human pose frames. The performance of
the action recognition is strongly related to the data.
When testing on new subjects or new tasks, the per-
formance drops because of out-of-distribution sam-
ples. This can be because of the style of movement
of the new subject or because of different dimensions
and relations between joints. As labeling new data of
these new subjects is time-consuming and expensive,
unsupervised domain adaptation can offer a solution
to improve performance on these out-of-distribution
subjects or tasks. Figure 1 shows a simplified visual-
ization of the problem. In this paper, we test various
domain adaptation techniques with different combi-
nations of losses, backbones, and other hyperparame-
ters. We discuss the results from our experiments on
a
https://orcid.org/0000-0002-1080-6847
b
https://orcid.org/0000-0002-2969-3133
c
https://orcid.org/0000-0002-4812-4841
this topic and offer guidelines to tackle Domain adap-
tation on human action recognition. We used gen-
eral domain adaptation techniques as the literature is
limited for domain adaptation on human pose action
recognition. More advanced or newer domain adapta-
tion techniques are linked with the task and extract ad-
ditional performance from the data, goal, and model
architecture (Xu et al., 2022; Luo et al., 2020). This
paper could serve as a stepping stone for further re-
search on this topic.
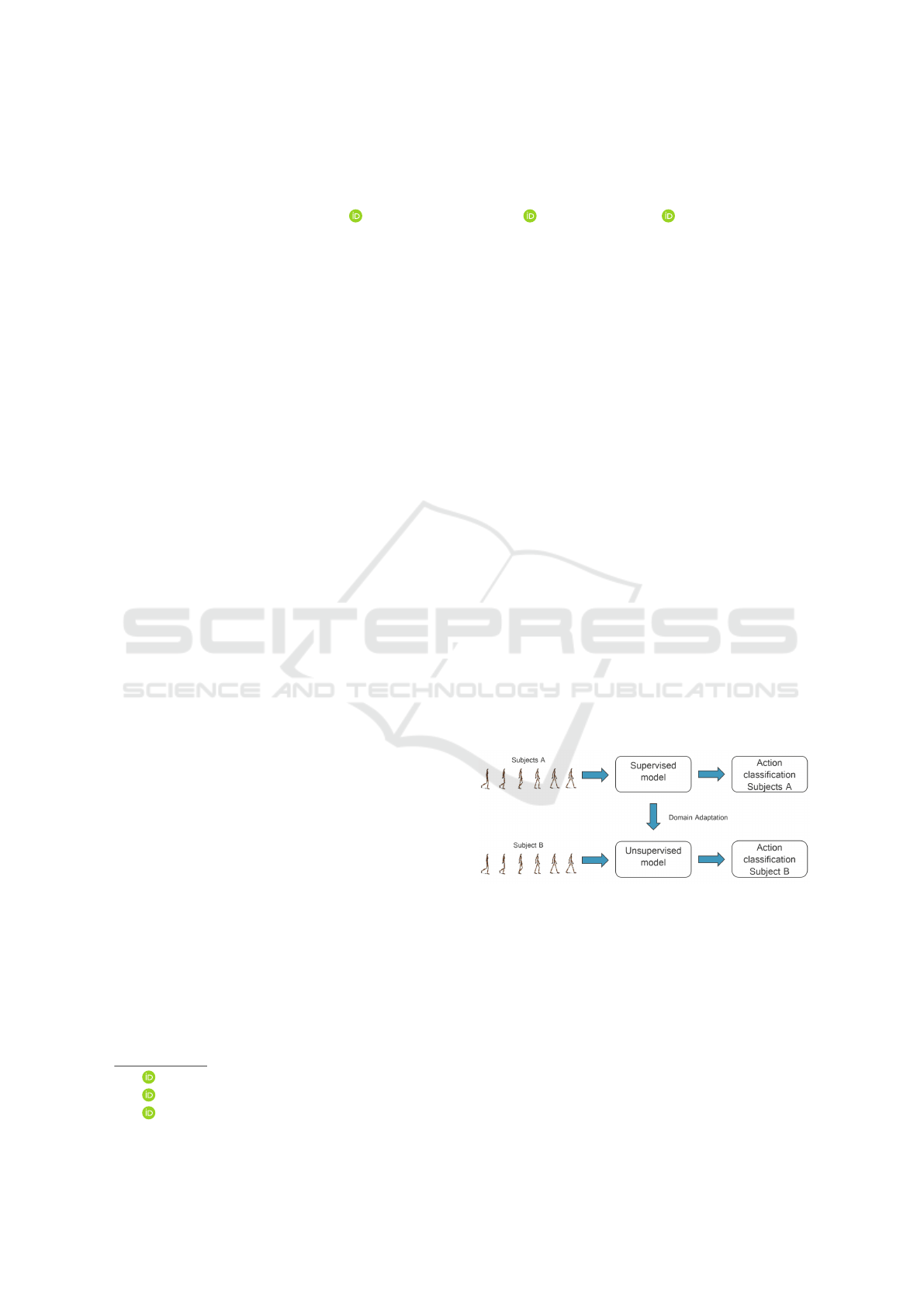
Figure 1: Simplified visualization of the problem. We adapt
a supervised action recognition model, trained on source la-
bels (subjects A), with domain adaptation techniques to per-
form better on unseen data from a target user (subject B).
The inputs for both models are human pose data.
2 RELATED WORK
For our related work, we focus on unsupervised do-
main adaptation and human pose action recognition.
Billast, M., De Schepper, T. and Mets, K.
Unsupervised Domain Adaptation for Human Pose Action Recognition.
DOI: 10.5220/0012573400003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 2: VISAPP, pages
837-844
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
837

2.1 Domain Adaptation
The main method to perform domain adaptation is
aligning both domains and creating discriminative
domain-invariant features. This can be done by metric
learning, adversarial learning, or data augmentation.
An example of metric learning is Maximum
Mean Discrepancy (MMD)(Long et al., 2013) by
matching the distributions of source and target do-
mains or Deep Reconstruction-Classification Net-
work (DRCN) (Ghifary et al., 2016). Some exam-
ples of Adversarial techniques are Adversarial Bipar-
tite Graph Learning, which creates a domain-agnostic
video classifier to overcome the limitations of adver-
sarial representation learning on videos (Luo et al.,
2020), Gradient Reversal Layer (GRL) (Ganin and
Lempitsky, 2015), Gradient Reversal Layer method
without the discriminator as the task-specific classi-
fier is reused as a discriminator (Chen et al., 2022),
and Adversarial Discriminative Domain Adaptation
(ADDA) (Tzeng et al., 2017).
Domain adaptation can be done with data aug-
mentation of instances that bridge the gap between
source and target domains. A few examples are
Mixup (Zhang et al., 2017) which creates samples by
linearly interpolating between two instances of dif-
ferent domains, Vision Transformer utilizing Mixup
strategy exploiting cross-attention (Zhu et al., 2023)
to build an intermediate domain between source and
target, and Contrastive Vicinal Space (Na et al., 2022)
which alleviates the problem that the source labels are
dominant over the target labels by constraining the
model on vicinal instances to have different views and
labels in the contrastive space and agree in the consen-
sus space.
Other mechanisms to improve domain adaptation
are Cross-domain gradient discrepancy minimization
(Du et al., 2021) as it better represents the seman-
tic information, k-nearest neighbor classifier after
feature fusion of multiple modalities (Lang et al.,
2019), cross-attention of transformers to create better
pseudo-labels of the target sample to improve the per-
formance(Xu et al., 2022), and generalization to tar-
get domain by including domain contrastive loss and
spatio-temporal contrastive loss on vision data (Song
et al., 2021).
2.2 Human Pose Action Recognition
There is limited related work on domain adaptation
for human pose action recognition. In (Tas and Ko-
niusz, 2018), they perform human action recognition
on 3D pose data by first transforming the coordinate
data into a texture representation on which a CNN
(ResNet-50) is applied in combination with a domain
adaptation technique. Phase Randomization (Mit-
suzumi et al., 2024) disconnects the individuality and
action feature with self-supervised data augmentation
and data augmentation to randomize only the phase
component of the motion sequence. This creates a
subject-agnostic model.
3 DATASET
All our experiments are done on the H36M
Dataset (Ionescu et al., 2014). The dataset consists
of 6 subjects that performed 15 different actions. In
total, there are 3.6 million frames available within
the dataset with corresponding 3D human pose data.
The dataset has accurate 3D joint positions and joint
angles from a high-speed motion capture system at
50Hz. The kinematic tree of the human pose is com-
posed of 22 joints with XYZ coordinates relative to
the center of the hip joint. Before running the abso-
lute positions through a model, the data is normalized
between -1 and 1 in the three dimensions. Each frame
has an action ID ranging from 0 to 15.
The data split for testing is given by the same
frame numbers for each action and subject as in the
SRNN paper (Jain et al., 2016). The training split is
given by frame numbers such that there is no overlap
with the test data and that there is at least a two-frame
buffer to make sure there is no prior information about
the test data during training.
4 METHOD
Human action classification takes T frames of human
poses with V joints as input and predicts the most
probable action class for that input. The goal is to
maximize the accuracy of the action classification.
The domain adaptation setting in this paper assumes
the source domain with labeled data to be data from
subject(s) A and the target domain without labeled
data during the training phase of the model to be from
subject(s) B. The reason for this setup is to find a per-
sonalized model that generalizes well to new out-of-
distribution data from new subjects.
The main goal of this paper is not to have the
highest performance of domain adaption but to see
which changes in architecture have the highest im-
pact. We did this by starting from a base model, adap-
tation technique, and hyperparameter tuning which
will serve as a reference baseline. By changing one
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
838

thing, we try to pinpoint the advantages or disadvan-
tages of certain changes to the model and setup.
4.1 Options
In this section, we list the various options of do-
main adaptation technique, backbone, and loss func-
tion from which we can choose variations to compare
with each other.
We tested four different Domain adaptation tech-
niques, i.e. Deep Reconstruction-Classification Net-
work (DRCN) (Ghifary et al., 2016), Gradient Rever-
sal Layer (GRL) (Ganin and Lempitsky, 2015), Ad-
versarial Discriminative Domain Adaptation (ADDA)
(Tzeng et al., 2017), and Maximum Mean Discrep-
ancy (MMD)(Long et al., 2013). The first three works
by adapting the feature representation of the target do-
main onto the source domain. The last one (MMD)
tries to match the distributions of the source and target
domain. We chose these techniques as they are gen-
erally applicable to each task, model, or data because
more advanced techniques extract additional perfor-
mance by making task-specific alterations.
We tested two backbones to compare different
strategies to extract structure from the data. As previ-
ously mentioned, we use a Graph convolutional net-
work with variable edge connections between nodes
in space and time. The other backbone we test is
a more standard convolutional neural network, i.e.
ResNet-50, which is designed to find local structures
in the first layers. There are enough examples where
they use a CNN on graph data (Ding et al., 2023)(Tas
and Koniusz, 2018). As the receptive field increases
through the layers, a CNN can link joints separated
by more space and time.
As a last variation, we add Contrastive loss to cre-
ate clusters of the feature vectors per action in the
source domain. The reasoning behind this extra loss is
to also create more discriminative clusters per action
in the target domain when we map the target feature
space on the source feature space.
4.2 Baseline
To be more specific, we will now go over our choices
for the baseline model and explain the reasons for
each choice. For the backbone, we chose a Space-
Time-Separable Graph Convolutional Network (STS-
GCN)(Sofianos et al., 2021) as it is a natural way
to represent spatio-temporal relations of human pose
data and gather insights into the topic. It lowers the
number of parameters needed, compared to RNN or
CNN models, which is an advantage for real-time ap-
plications as it decreases inference speed. The train-
able adjacency matrices with full joint-joint and time-
time connections have attention properties as some
nodes/timeframes will be more important for the pre-
dicted action. For the domain adaptation technique,
we chose Adversarial Discriminative Domain Adap-
tation (ADDA) (Tzeng et al., 2017), as it is an unsu-
pervised domain adaptation technique that works with
any framework where a feature representation of the
input is available. The loss function for our baseline is
the cross-entropy loss function as it is the most com-
mon multi-class loss function. Other hyperparameters
like the learning rate, iterations of the discriminator,
and target encoder are optimized by iterating over a
range of possibilities for each hyperparameter.
4.3 Domain Adaptation
In this section, we explain all the used domain adap-
tation techniques in more detail.
4.3.1 ADDA
ADDA is a general unsupervised domain adaptation
technique and consists of three stages. First, an initial
classification model, which is an encoder followed by
a classifier, is trained on a large dataset of labeled
data sampled from the source domain. Then, a do-
main discriminator and target encoder, are trained al-
ternately. The input of the discriminator is the feature
vector from the source and target encoder, computed
by alternately encoding the source and target inputs.
After training, the discriminator should not be able to
distinguish the extracted feature encodings from the
source and target domain. This can be done by using
an inverted-label GAN loss, with the following loss
function for the domain discriminator:
L
disc
= −(1 −Y )log(1 − D(E(I))) −Y log(D(E(I)),
(1)
where Y represent the domain label, E(I) the encoded
feature from input I, and D(X) the prediction of the
domain classifier with feature X as input. The dis-
criminator is trained by minimizing L
disc
, while the
encoder is trained by minimizing the cross-entropy
loss of the classifier and maximizing L
disc
. Finally,
the target encoder is evaluated by feeding target sam-
ples which are mapped to an approximately domain-
invariant feature space and afterwards classified by
the source classifier
4.3.2 GRL
Gradient Reversal Layer domain adaptation (Ganin
and Lempitsky, 2015) has similar components as
ADDA but only has 1 stage and everything is trained
Unsupervised Domain Adaptation for Human Pose Action Recognition
839

end-to-end. The encoder and classifier are updated
with supervised training on source data by minimiz-
ing a Loss function L
c
. A domain discriminator uses
feature vectors from the encoder as input and out-
puts a domain label whether the input data is from
the source or target domain. The weights of the dis-
criminator are updated by minimizing a binary cross
entropy loss L
d
and the weights of the encoder θ
e
are updated by maximizing this loss L
d
. Maximiz-
ing the loss is accomplished by reversing the back-
propagation gradients between the encoder and the
discriminator. The gradients after the reversal layer
are −λ
∂L
d
∂θ
f
. This process incorporates target domain
information into the model without any labels.
4.3.3 MMD
Maximum Mean Discrepancy (Long et al., 2013) is
a domain adaptation method not based on individual
samples but by looking at the distribution of a group
of samples. Besides the supervised training on train-
ing data, the distributions of source and target data are
matched with the following formula of the empirical
estimate of MMD:
\
MMD
2
=
1
n(n − 1)
n
∑
i̸= j
k(x
i
, x
j
)+
1
n(n − 1)
n
∑
i̸= j
k(y
i
, y
j
) −
2
n
2
n
∑
i, j
k(x
i
, y
j
) (2)
where n is the number of samples of data, x
i
is a
source data sample, y
i
is a target data sample, and k()
is a distance metric. In our case, we chose k() as a
Gaussian distance metric :
k(x
i
, y
i
) = exp(
−||x
i
− y
i
||
2
2σ
2
) (3)
4.3.4 DRCN
The Deep Reconstruction-Classification Network
(DRCN) (Ghifary et al., 2016) is a domain adaptation
technique that is based on two mechanisms to train
a feature encoder. As with the other techniques, the
first mechanism is the supervised training on source
data. The second mechanism is the unsupervised re-
construction of unlabeled target data. The first part
makes sure the model can still classify the different
classes and the second part encodes information from
the target domain.
4.4 Backbone
In this section, we explain all the used backbones in
more detail.
4.4.1 STS-GCN
The STS-GCN (Sofianos et al., 2021) model con-
sists of Spatio-Temporal Graph Convolutional layers
(STGCN) followed by Temporal convolutional layers
(TCN). The STGCN layers allow full space-space and
time-time connectivity but limit space-time connec-
tivity by replacing a full adjacency matrix with the
multiplication of space and time adjacency matrices.
The obtained feature embedding of the graph layers is
decoded by four TCN layers which produce the fore-
casted human pose trajectories.
The motion trajectories in a typical GCN model
are encoded into a graph structure with VT nodes for
all body joints at each observed frame in time. The
edges of the graph are defined by the adjacency matrix
A
st
∈ R
V T ×V T
in the spatial and temporal dimensions.
The information is propagated through the network
with the following equation:
H
(l+1)
= σ(A
st−(l)
H
(l)
W
(l)
) (4)
where H
(l)
∈ R
C
(l)
×V T
is the input to GCN layer l with
C
(l)
the size of the hidden dimension which is 3 for the
first layer, W
(l)
∈ R
C
(l)
×C
(l+1)
are the trainable graph
convolutional weights of layer l, σ the activation func-
tion and A
st−(l)
is the adjacency matrix at layer l. The
STS-GCN model alters the GCN model by replacing
the adjacency matrix with the multiplication of T dis-
tinct spatial and V distinct temporal adjacency matri-
ces.
H
(l+1)
= σ(A
s−(l)
A
t−(l)
H
(l)
W
(l)
) (5)
where T different A
s−(l)
∈ R
V ×V
describe the joint-
joint relations for each of T timesteps and V differ-
ent A
t−(l)
∈ R
T ×T
describe the time-time relations for
each of V joints. This version limits the space-time
connections and reports good performance (Sofianos
et al., 2021). This matrix multiplication is practically
defined as two Einstein summations.
A
t−(l)
vtq
X
nctv
= X
t
ncqv
(6)
A
s−(l)
tvw
X
t
nctv
= X
st
nctw
(7)
4.4.2 ResNet-50
The ResNet-50 model (He et al., 2015) is a deep con-
volutional network comprising 50 layers. The main
building blocks are convolutional layers and identity
blocks. The identity blocks take the input through
several convolutional layers and add the input with
the output again. This solved the problem of vanish-
ing gradients to be able to train larger models more
efficiently.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
840
Table 1: Accuracy of different domain adaptation tech-
niques on the same baseline backbone and loss functions.
Domain Adaptation Average Accuracy
None 0.4470
ADDA 0.4941
MMD 0.4786
GRL 0.5012
DRCN 0.4669
DRCN t 0.4689
4.5 Contrastive Loss
Contrastive loss helps to discriminate better between
clusters. Specifically, it minimizes the distance be-
tween vectors from the same cluster and it maximizes
the distance between vectors from different clusters.
In our case, we used the Cosine similarity as a dis-
tance metric. The clusters are defined by the action
classes and can only be used when training on source
data as we need the action labels for this contrastive
loss. But by increasing the discriminative power of
the source encoder, we hypothesize that the target en-
coder also improves when mapping target encodings
onto source encodings.
5 IMPLEMENTATION DETAILS
The GCN baseline model uses 4 TCN layers, and 4
STGCN layers (Sofianos et al., 2021). During train-
ing with ADDA, a range of learning rates were tested
and a learning rate of 1 × 10
−6
gave the best re-
sults for both updating the discriminator and target
encoder. The batch size is 256 for all experiments.
To update the weights, an Adam optimizer is used
with β
1
= 0.9, β
2
= −.999, and weight decay pa-
rameter λ = 1 × 10
−4
. The numbers of channels for
the STGCN layers are respectively 3, 64, 32, and 64,
and the number of channels for all four TCN layers is
equal to the output time frame. All models are trained
for 250 epochs with a learning rate scheduler which
lowers the learning rate by a factor γ = 0.2 when the
accuracy loss does not decrease for 10 steps. The
sampling of action classes is balanced based on the
number of occurrences in the dataset. To Train the
source encoder, the model is trained for 250 epochs
with a learning rate of 0.0005 and the same learning
rate scheduler as during the domain adaptation.
Table 2: Accuracy of different domain adaptation tech-
niques with different backbone.
Domain Adaptation Backbone Average Accuracy
S on T STS-GCN 0.4470
ADDA STS-GCN 0.4941
MMD STS-GCN 0.4786
GRL STS-GCN 0.5012
MMD ResNet-50 0.4959
GRL ResNet-50 0.5228
ADDA ResNet-50 0.5051
6 RESULTS
All accuracies shown in the tables are measured on
target data. The average accuracies are a combina-
tion of all accuracies where each subject is alternately
the target data and the source data is the remaining
subjects. We tested four different domain adaptation
techniques with the same backbone model and con-
figurations. As seen in Table 1, GRL has the best re-
sult on the baseline model, and DRCN the least. The
advantage of GRL is that it is end-to-end with mul-
tiple iterations over source and target data, whereas
ADDA needs more finetuning and has more poten-
tial suboptimal parameters during each training stage.
DRCN performs the worst as the reconstruction of
the input does not contain enough subject-agnostic
information to classify the action correctly. For the
reconstruction, the dimensions of the subject play a
more important role than the movement of the subject
which is essential to classify the action. To see the
influence of different backbones on the feature rep-
resentation, we experimented with a STS-GCN back-
bone and a ResNet-50 backbone. In Table 2, we see
that the ResNet50 model has an overall better perfor-
mance than the same model with a GCN backbone.
This means the CNN backbone can extract enough
structure from the input as the receptive field is larger
than the input in our experiment. Shuffling the posi-
tion of the nodes decreases the performance as it takes
away the given structure of the kinematic tree, as the
nodes of the upper body, lower body, and limbs are
grouped initially. In Table 3 is shown that the CNN
backbone suffers the most in performance as it cannot
exploit local structures anymore. The GCN is robust
for different input variations. Table 4 shows that
2 STGCN layers is the optimal number of layers as
it avoids the over-smoothing effect of too many lay-
ers, i.e. more hops between nodes. With only one
layer, there is not enough information shared between
nodes. Added Contrastive loss adds performance in
combination with a ResNet-50 backbone as it cre-
ates more discriminative clusters in the feature space
Unsupervised Domain Adaptation for Human Pose Action Recognition
841
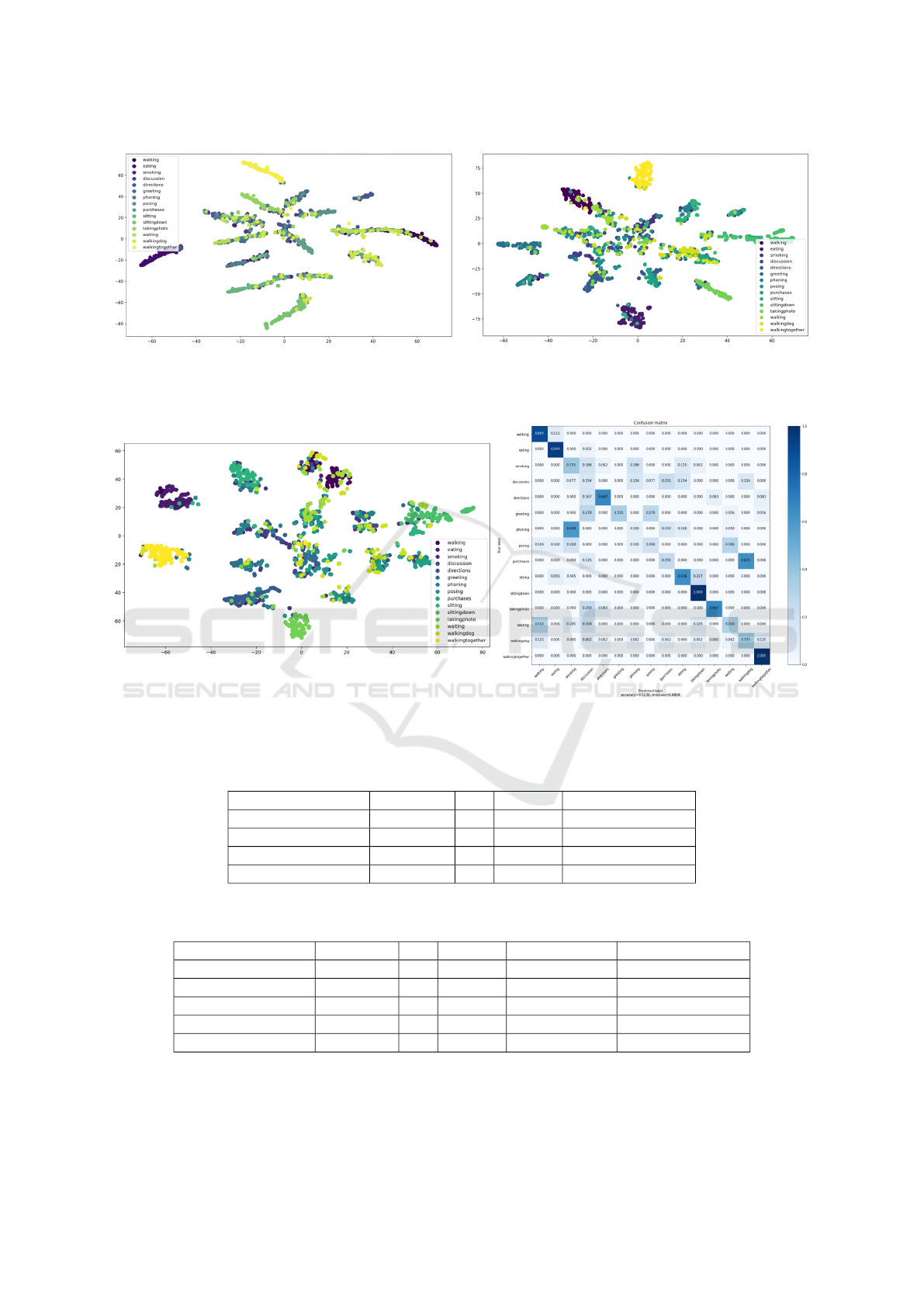
Figure 2: Visualization of the feature representation by T-SNE dimension reduction. On the left, is the feature representation
of the baseline model with ResNet-50 backbone and added CL loss, and on the right, is the same model but without CL loss.
Both representations are on target data from subject 9.
Figure 3: Visualization of the feature representation by T-SNE dimension reduction on the left and confusion matrix on the
right of the ResNet-50 model with GRL domain adaptation on subject 9 as target data.
Table 3: Accuracy of different domain adaptation techniques with different backbone and varying the input by shuffling the
order of the structured kinematic tree joints.
Domain Adaptation Backbone CL shuffled Average Accuracy
ADDA STS-GCN ✓ ✗ 0.4849
ADDA ResNet-50 ✓ ✗ 0.5002
ADDA STS-GCN ✓ ✓ 0.4756
ADDA ResNet-50 ✓ ✓ 0.4720
Table 4: Accuracy of different domain adaptation techniques with different backbones and varying the number of STGCN
layers in the backbone to create the feature representations.
Domain Adaptation Backbone CL shuffled STGCN layers Average Accuracy
ADDA STS-GCN ✓ ✗ 1 0.4800
ADDA STS-GCN ✓ ✗ 2 0.5003
ADDA STS-GCN ✓ ✗ 3 0.4893
ADDA STS-GCN ✓ ✗ 4 0.4849
ADDA STS-GCN ✓ ✗ 6 0.4892
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
842
Table 5: Accuracy of different domain adaptation techniques with different backbone and adding a Contrastive Loss during
training on labeled source data.
Domain Adaptation Backbone CL shuffled Average Accuracy
ADDA STS-GCN ✗ ✗ 0.4941
ADDA ResNet-50 ✗ ✗ 0.5051
ADDA STS-GCN ✓ ✗ 0.5151
ADDA ResNet-50 ✓ ✗ 0.5002
Table 6: Detailed overview of accuracies per target subject of different models with various percentages of labeled target data
available during training compared with the best model with domain adaptation.
Domain Backbone % target Accuracy per target subject Average
Adaptation labels 9 8 7 6 5 1 Accuracy
None STS-GCN 0 0.4285 0.6437 0.3983 0.3258 0.4775 0.4084 0.4470
None STS-GCN 30 0.5393 0.5233 0.4747 0.4219 0.5046 0.3420 0.4676
GRL ResNet-50 0 0.5306 0.6437 0.4713 0.4546 0.5300 0.5067 0.5228
None STS-GCN 40 0.5554 0.6366 0.6126 0.4873 0.5853 0.4793 0.5594
None ResNet-50 100 0.9340 0.9627 0.9493 0.8846 0.9226 0.9313 0.9307
None STS-GCN 100 0.9379 0.9426 0.9473 0.8813 0.9400 0.9340 0.9305
which can be seen by the visualization of the features
by t-SNE dimension reduction, as can be seen in Fig-
ure 2. Table 5 shows that there is also a slight per-
formance increase when using an added contrastive
loss during pretraining on labeled source data. Table
6 shows that there is still a big gap between an Or-
acle (100% target labels) and the domain adaptation
models without any labeled target data. But when we
varied the number of target labels available, we con-
cluded that we needed between 30% and 40% of all
the available target labels to get the same result as the
best model with domain adaptation. Figure 3 shows a
visualization of the feature representation and confu-
sion matrix on one target subject for this best model
with domain adaptation.
7 DISCUSSION
In this paper, we test several domain adaptation tech-
niques on human pose motion data to classify actions.
The specific unsupervised domain adaptation in this
paper aimed to acquire personalized models for sub-
jects without any labeled information. We showed
that all these techniques improve the results on the
target data compared to the model only trained on la-
beled source data. We also varied the backbone and
concluded that a CNN can exploit the local structures
in the kinematic tree to improve the results. Con-
trastive Loss serves as an aid to improve the discrim-
inative power of the feature representations of the
source domain and consequently the target domain af-
ter domain adaptation. We need between 30% and
40% of target labels to close the gap between our best
domain adaptation model. This research serves as a
stepping stone for further research on domain adapta-
tion on human pose data. Possible extensions are fur-
ther expanding the number of adaptation techniques,
adding other data streams about the human pose like
rotational data, and testing on other datasets/classes.
ACKNOWLEDGEMENTS
This research received funding from the Flemish
Government under the “Onderzoeksprogramma Arti-
fici
¨
ele Intelligentie (AI) Vlaanderen” programme.
REFERENCES
Chen, L., Chen, H., Wei, Z., Jin, X., Tan, X., Jin, Y., and
Chen, E. (2022). Reusing the task-specific classifier
as a discriminator: Discriminator-free adversarial do-
main adaptation. In Proceedings of the IEEE/CVF
Conference on Computer Vision and Pattern Recog-
nition (CVPR), pages 7181–7190.
Ding, X., Zhang, Y., Ge, Y., Zhao, S., Song, L., Yue, X.,
and Shan, Y. (2023). Unireplknet: A universal per-
ception large-kernel convnet for audio, video, point
cloud, time-series and image recognition.
Du, Z., Li, J., Su, H., Zhu, L., and Lu, K. (2021). Cross-
domain gradient discrepancy minimization for unsu-
pervised domain adaptation.
Ganin, Y. and Lempitsky, V. (2015). Unsupervised do-
main adaptation by backpropagation. In International
conference on machine learning, pages 1180–1189.
PMLR.
Ghifary, M., Kleijn, W. B., Zhang, M., Balduzzi, D., and
Li, W. (2016). Deep reconstruction-classification
Unsupervised Domain Adaptation for Human Pose Action Recognition
843

networks for unsupervised domain adaptation. In
Computer Vision–ECCV 2016: 14th European Con-
ference, Amsterdam, The Netherlands, October 11–
14, 2016, Proceedings, Part IV 14, pages 597–613.
Springer.
He, K., Zhang, X., Ren, S., and Sun, J. (2015). Deep resid-
ual learning for image recognition.
Ionescu, C., Papava, D., Olaru, V., and Sminchisescu, C.
(2014). Human3.6m: Large scale datasets and pre-
dictive methods for 3d human sensing in natural envi-
ronments. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 36(7):1325–1339.
Jain, A., Zamir, A. R., Savarese, S., and Saxena, A.
(2016). Structural-rnn: Deep learning on spatio-
temporal graphs.
Lang, Y., Wang, Q., Yang, Y., Hou, C., Huang, D., and Xi-
ang, W. (2019). Unsupervised domain adaptation for
micro-doppler human motion classification via feature
fusion. IEEE Geoscience and Remote Sensing Letters,
16(3):392–396.
Long, M., Wang, J., Ding, G., Sun, J., and Yu, P. S. (2013).
Transfer feature learning with joint distribution adap-
tation. In Proceedings of the IEEE International Con-
ference on Computer Vision (ICCV).
Luo, Y., Huang, Z., Wang, Z., Zhang, Z., and Baktashmot-
lagh, M. (2020). Adversarial bipartite graph learning
for video domain adaptation. In Proceedings of the
28th ACM International Conference on Multimedia,
MM ’20. ACM.
Mitsuzumi, Y., Irie, G., Kimura, A., and Nakazawa, A.
(2024). Phase randomization: A data augmentation
for domain adaptation in human action recognition.
Pattern Recognition, 146:110051.
Na, J., Han, D., Chang, H. J., and Hwang, W. (2022). Con-
trastive vicinal space for unsupervised domain adap-
tation.
Pareek, P. and Thakkar, A. (2021). A survey on video-based
human action recognition: recent updates, datasets,
challenges, and applications. Artificial Intelligence
Review, 54:2259–2322.
Sofianos, T., Sampieri, A., Franco, L., and Galasso, F.
(2021). Space-time-separable graph convolutional
network for pose forecasting. In Proceedings of the
IEEE/CVF International Conference on Computer Vi-
sion (ICCV), pages 11209–11218.
Song, X., Zhao, S., Yang, J., Yue, H., Xu, P., Hu, R., and
Chai, H. (2021). Spatio-temporal contrastive domain
adaptation for action recognition. In Proceedings of
the IEEE/CVF Conference on Computer Vision and
Pattern Recognition, pages 9787–9795.
Tas, Y. and Koniusz, P. (2018). Cnn-based action recog-
nition and supervised domain adaptation on 3d body
skeletons via kernel feature maps.
Tzeng, E., Hoffman, J., Saenko, K., and Darrell, T. (2017).
Adversarial discriminative domain adaptation. In Pro-
ceedings of the IEEE conference on computer vision
and pattern recognition, pages 7167–7176.
Xu, T., Chen, W., Wang, P., Wang, F., Li, H., and Jin, R.
(2022). Cdtrans: Cross-domain transformer for unsu-
pervised domain adaptation.
Zhang, H., Ciss
´
e, M., Dauphin, Y. N., and Lopez-Paz, D.
(2017). mixup: Beyond empirical risk minimization.
CoRR, abs/1710.09412.
Zhu, J., Bai, H., and Wang, L. (2023). Patch-mix trans-
former for unsupervised domain adaptation: A game
perspective.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
844
