
A Type of EEG-ITNet for Motor Imagery EEG Signal Classification
Maryam Khoshkhooy Titkanlou
1a
, Ehsan Monjezi
2b
and Roman Mouček
3c
1
Department of Computer Science and Engineering, University of West Bohemia, 306 14 Plzen, Czech Republic
2
Department of Electrical Engineering, Shahid Chamran University, Golestan Blvd. Ahvaz, Iran
3
Department of Computer Science and Engineering, University of West Bohemia, 306 14 Plzen, Czech Republic
Keywords: Electroencephalography, Brain-Computer Interface, ERD/ERS, Deep Neural Network, Motor Imagery,
Inception Module.
Abstract: The brain-computer interface (BCI) is an emerging technology that has the potential to revolutionize the
world, with numerous applications ranging from healthcare to human augmentation. Electroencephalogram
(EEG) motor imagery (MI) is among the most common BCI paradigms used extensively in healthcare
applications such as rehabilitation. Recently, neural networks, particularly deep architectures, have received
substantial attention for analyzing EEG signals (BCI applications). EEG-ITNet is a classification algorithm
proposed to improve the classification accuracy of motor imagery EEG signals in a noninvasive brain-
computer interface. The resulting EEG-ITNet classification accuracy and precision were 75.45% and
76.43%, using a motor imagery dataset of 29 healthy subjects, including males aged 21-26 and females aged
18-23. Three different methods have also been implemented to augment this dataset.
a
https://orcid.org/0000-0002-4139-6836
b
https://orcid.org/0009-0008-4395-787X
c
https://orcid.org/0000-0002-4665-8946
1
INTRODUCTION
A brain-computer interface system (BCI) is a control
pathway created through a form of communication
between the neural activity of the human brain and
the outside world via brain signal recording and
decoding techniques. The application of BCI
systems has gone in two main directions. The first
direction is studying brain activity to explore a
feedforward pathway that controls the external
devices without the rehabilitation intention. The other
main direction is using closed-loop BCI systems
during neurorehabilitation, with the feedback loop
playing an essential role in recovering the neural
plasticity training or controlling brain activities
(Lebedev & Nicolelis, 2017). The methods for
recording brain activity are categorized into invasive
and noninvasive groups.
While some noninvasive technologies offer
superior spatial resolution, such as fMRI, EEG has
proved to be the most popular method for its ability
to directly measure neural activity, cost-
effectiveness, and portability for clinical applications
(Wolpaw et al., 2002). EEG signals have been used to
control assistive and rehabilitation devices (Meng et
al., 2016).
Motor imagery involves the brain’s imagination
without actual physical movement. The contralateral
sensorimotor cortical EEG signals in the alpha band
(8–12 Hz) and beta band (13–30 Hz) (Mu Li & Bao-
Liang Lu, 2009) exhibit a decrease in amplitude
during unimanual preparation and execution of a
movement. This phenomenon is known as event-
related desynchronization (ERD), which represents a
decrease in the amplitude of the activated cortical
EEG signals. Simultaneously, there is an increase in
the amplitude of the ipsilateral sensorimotor cortical
EEG signals in the alpha and beta frequency bands,
which is called event-related synchronization (ERS)
and represents an increase in the amplitude of the
corresponding cortical signals in the resting state (Liu
et al., 2019). The ERD/ERS observed in the μ and β
frequency bands of the brain motor-sensory cortices
indicates the activation or deactivation state of the
central region of the brain.
Deep neural networks, which can extract complex
Khoshkhooy Titkanlou, M., Monjezi, E. and Mou
ˇ
cek, R.
A Type of EEG-ITNet for Motor Imagery EEG Signal Classification.
DOI: 10.5220/0012569400003657
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 17th International Joint Conference on Biomedical Engineering Systems and Technologies (BIOSTEC 2024) - Volume 2, pages 257-262
ISBN: 978-989-758-688-0; ISSN: 2184-4305
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
257

features from raw data automatically, have received
significant attention in motor imagery signal
classification (LeCun et al., 2015) (Altaheri et al.,
2023). Convolutional neural networks have proposed
neural network models with various architectures to
classify motor imagery signals. For example,
Schirrmeiste et al. (Schirrmeister et al., 2017) studied
deep and shallow convolutional neural networks
called DeepConvNet and ShallowConvNet, among
the first models used to decode motor imagery tasks
from raw EEG signals. Later, Lawhern et al.
(Lawhern et al., 2018) introduced EEGNet, a more
compact and efficient CNN architecture with fewer
parameters than ShallowNet and DeepConvNet. Dai
et al. (Dai et al., 2020) proposed a hybrid-scale CNN
architecture with a data augmentation method to
improve the accuracy of EEG motor imagery
classification. Borra et al. (Borra et al., 2020)
proposed a lightweight and interpretable shallow
CNN (Sinc-ShallowNet) architecture for EEG motor
decoding. Santamaría-Vázquez et al. (Santamaria-
Vazquez et al., 2020) studied a novel CNN, called
EEG-Inception, that improves the accuracy and
calibration time of assistive ERP-based BCIs, but the
network lacked interpretability. Mirzabagherian et al.
(Mirzabagherian et al., 2023), based on convolutional
layers with temporal-spatial, Separable and
Depthwise structures, developed (Temporal-Spatial
Convolutional Residual Network)TSCR-Net and
(Temporal-Spatial Convolutional Iterative Residual
Network)TSCIR-Net models which decoded
distinctive characteristics of different movement
efforts and obtained higher classification accuracy
than previous deep neural networks. Amin et al.
(Amin et al., 2022) introduced an attention inception
approach that combines CNN and LSTM networks
for motor imagery task classification, which extracts
spatial features by CNN and temporal features by
LSTM and then merges all features into a fully
connected layer. However, because of their
exploding/vanishing gradient or lack of memory
issues, RNNs (e.g., LSTM) are less common in this
field. By including TCN in their structure, Ingolfsson
et al. (Ingolfsson et al., 2020) and Musallam et al.
(Altuwaijri & Muhammad, 2022) have reported better
results for the classification of motor imagery signals
in response to the slow training essence of RNNs.
TCNs have been shown promising outcomes for
temporal analysis of EEG time series with faster
computation. In this paper, we introduce EEG-ITNet
(Salami et al., 2022), which can extract rich spectral,
spatial, and temporal information from multi-channel
EEG signals with less complexity by using inception
modules and causal convolutions with dilation.
The subsequent sections of this paper are arranged
as follows. Section 2 provides the material and
methods used in this research. Following that, our
result is presented in section 3. In section 4, we finally
conclude and provide some suggestions for the future.
2
MATERIAL AND METHODS
2.1 Data Acquisition
Four cycles in the entire EEG scenario are used for
measurement, with a resting and a stimulating phase
in each cycle. Every cycle begins with the subject
resting for one minute, during which they are required
to sit motionless and at complete rest. If their eyes are
open, this includes minimizing their blinking.
Following the resting phase, the participant moves
their wrists with either their left or right hand for two
minutes during the stimulation phase. Following a
five-second break, the subject completes the assigned
task during the stimulation phase. A green LED
positioned in front of the subject alerts them to the
phase shift. The subject completes the task and enters
the stimulation phase when the LED is on, and the
subject is in the resting phase when the LED is off.
The phases are then alternated this way, and each of
them is repeated three times. This means that each
cycle lasts exactly 9 minutes. The cycles differ from
each other by the task performed by the subject in the
stimulation phase, which is optionally combined with
alternating open or closed eyes.
The dataset was gathered at the University of
West Bohemia in the Czech Republic. 29 healthy
people were measured (men aged 21-26 and women
aged 18- 23) (Kodera et al., 2023). Each subject
received instructions on completing the measurement
before it began, and the procedure for each cycle was
specified before it began. In the meantime, the nurse
placed an EEG cap with Ag/AgCl electrodes on the
subject's head using a 10–20 system. Afterward, she
attached two electrodes to the subject's hand and one
ground electrode below the elbow because the
distance to the bone is smallest there. Lastly, a
reference electrode of the EEG cap was attached to
the earlobe. Fz, Cz, Pz, F3, F4, P3, P4, C3 and C4
were used for the measurement. Following
preparation, the subject was put in a dark, sound-
proof chamber to prevent background noise from the
surroundings during measurement.
The EEG data were captured using the BrainAmp
DC amplifier in conjunction with BrainVision
recorder software. For EMG recording, the
microcontroller STM324F429I-DISCO board and
HEALTHINF 2024 - 17th International Conference on Health Informatics
258
the EKG/EMG shield from Olimex company were
employed to generate synchronization pulses and
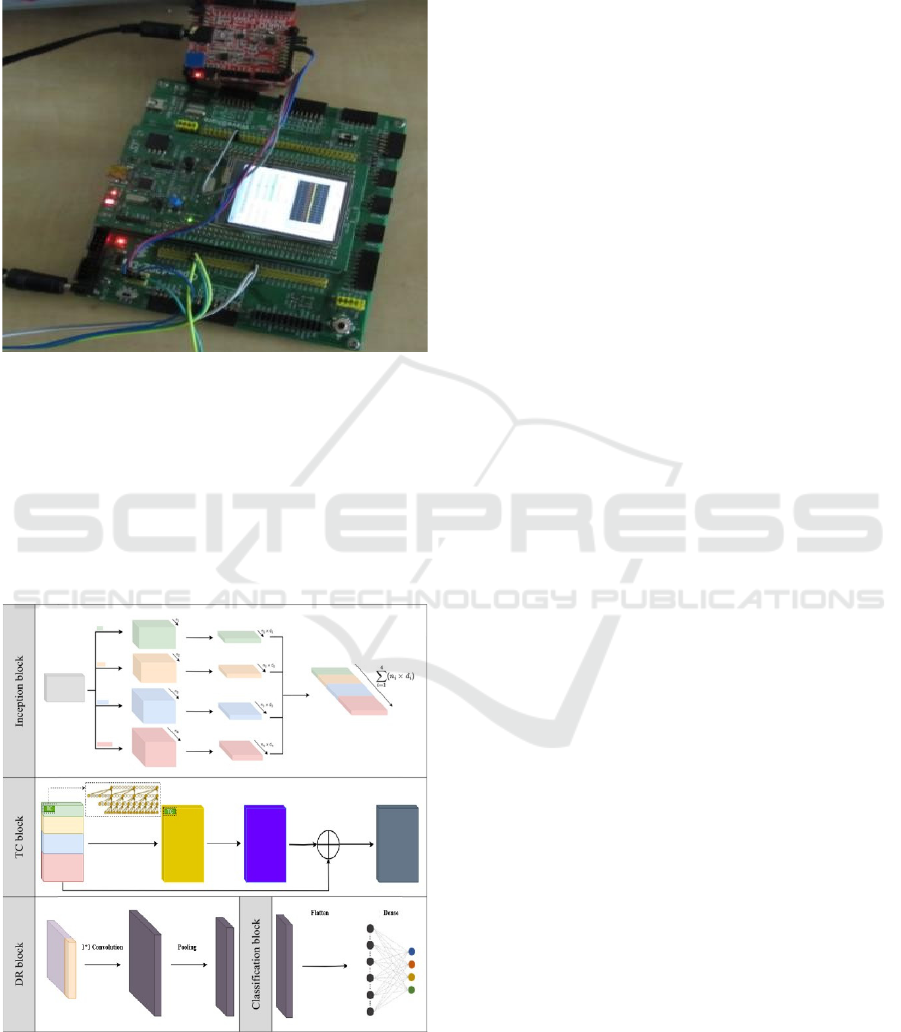
implement the stimulation scenario, as illustrated in
Figure 1.
Figure 1: Microcontroller board STM324F429I-DISCO
and EKG/EMG shield from company Olimex.
2.2 Our Proposed Method
The four primary blocks that comprise the general
architecture of EEG-ITNet are the inception block,
temporal convolution (TC) block, dimension
reduction (DR) block, and classification block, as
shown in Figure 2.
Figure 2: Details of different blocks in EEG-ITNet
architecture.
• Inception Block
Four parallel sets of layers are used to begin the
learning process, each comprising a 2D
convolutional layer along the temporal axis serving
as frequency filtering, followed by a 2D depthwise
convolutional layer functioning as spatial filtering.
Adding inception modules with different
convolutional kernel sizes eliminates the need for a
fixed-length kernel (Santamaria-Vazquez et al.,
2020). It allows the network to learn filters that
represent various frequency sub-bands. In order to
prevent overfitting and enable the network to learn
more complex nonlinear spatial information, this
block ends with a nonlinear activation function and
dropout.
• Temporal Convolution (TC) Block
The discriminative temporal features are extracted
using the TCN architecture, which considers the
time series history, following the extraction of
sources in various informative frequency sub-bands.
The TC block comprises multiple residual blocks,
each composed of depthwise causal convolutional
layers with leading zero padding, followed by
activation function and dropout. Using depthwise
causal convolution followed by batch normalization
instead of weight normalization made this model
more robust and performed better than the
conventional TCN. This block is also preceded by an
average pooling layer, which reduces the data
dimensions and prevents overfitting.
• Dimension Reduction (DR) Block
The output of the TC block fundamentally contains
temporal information retrieved from sources with
various frequency spectrums. To control the number
of final features used for the classification task, we
combined these temporal features using a 1 × 1
convolutional layer. This block also includes an
average pooling layer at the end, an activation
function, and a dropout layer to reduce the tensor
dimension further.
• Classification Block
The last component of the EEG-ITNet has a fully
connected layer with a "softmax" activation function
that comes after a flattened layer. Even though we
call it the classification layer, it is easily adjustable
based on the problem set and desired output.
We first used 10-fold cross-validation with 100
epochs. Before classification, 20% of the samples
were separated for testing purposes, and the
A Type of EEG-ITNet for Motor Imagery EEG Signal Classification
259
remaining 80% was utilized for training. The
learning rate value was 0.001. The model was
implemented in Keras.
It is worth mentioning that, since our dataset is
not large enough to obtain better results, we try to
implement three data augmentation approaches
(noise injection (NI), conditional variational
autoencoder (cVAE), and conditional GAN with
wasserstein price function and gradient penalty
(cWGAN-GP)) in order to expand the training set of
input data with newly created artificial samples.
3
RESULTS
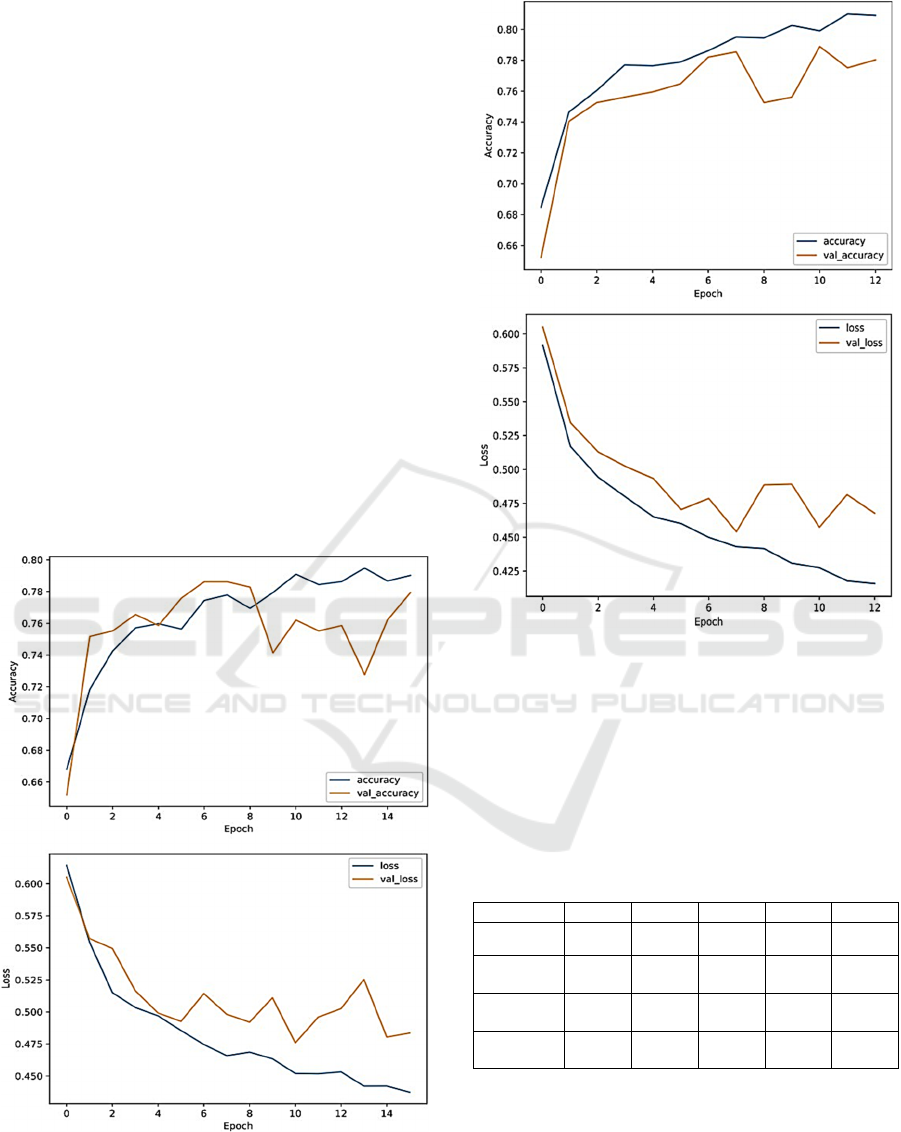
Table 1 summarises the classification accuracy,
precision, recall, F1 score, and AUC for the EEG-
ITNet model and the combination of this model with
the augmentation methods implemented in this
research. The accuracy of EEG-ITNet and NI EEG-
ITNet is 75.45 % and 75.86 %, respectively. The
accuracy and loss graphs of these two models are
shown in figure 3 and Figure 4.
Figure 3: Accuracy and loss curve of EEG-ITNet.
Figure 4: Accuracy and loss curve of NI EEG-ITNet.
Based on the results, only the noise injection
augmen-tation method improves the accuracy of
motor image-ry classification from 75.45% to
75.86% (0.41%). So, data augmentation does not
affect the result for this dataset. Unfortunately, there
is no English paper related to this dataset to compare
our results.
Table 1: Results of four models used in this study.
Method Accuracy Precision Recall F1 Score AUC
EEG-ITNet
75.45
±1.43
76.43
±0.96
75.50
±1.40
75.23
±1.58
0.755
±0.01
NI
EEG-ITNet
75.86
±1.21
76.31
±1.06
75.89
±1.21
75.77
±1.27
0.759
±0.01
cVAE
EEG-ITNet
74.25
±1.28
74.54
±1.29
74.28
±1.28
74.18
±1.29
0.743
±0.01
cWGAN-GP
EEG-ITNet
73.18
±2.04
74.42
±1.17
73.25
±2.01
72.84
±2.43
0.732
±0.02
4
CONCLUSIONS
The suggested method has proven to be suitable for
classifying hand movements in EEG. Our proposed
architecture includes four blocks, inception block,
HEALTHINF 2024 - 17th International Conference on Health Informatics
260

temporal convolution (TC) block, dimension
reduction (DR) block, and classification block. The
dataset used in this paper consists of 29 healthy
people who move their hands with open or closed
eyes. Alternatively, one of the limitations of this
dataset is that it is not large enough for EEG-ITNet
to prove its advantages, so data augmentation could
be an appropriate technique to solve this problem.
After adjusting the hyperparameters, our model's
accuracy and precision were 75.45% and 76.43%.
Furthermore, the best result with data augmentation
was related to the noise injection method, NI EEG-
ITNet, and its accuracy and precision were 75.86%
and 76.31%, respectively.
Since few models have been implemented on this
dataset, other researchers can try other deep networks
or combine our proposed method with other
algorithms to improve accuracy. The proposed data is
available in (Kodera et al., 2023).
ACKNOWLEDGEMENTS
This work was supported by the university specific
research project SGS-2022-016 Advanced Methods
of Data Processing and Analysis (project SGS-2022-
016).
REFERENCES
Lebedev, M. A., & Nicolelis, M. A. L. (2017). Brain-
Machine Interfaces: From Basic Science to Neuro-
prostheses and Neurorehabilitation. Physiological
Reviews, 97(2), 767–837. https://doi.org/10.1152/
physrev.00027.2016.
Wolpaw, J., Birbaumer, N., McFarland, D., Pfurtscheller,
G., & Vaughan, T. (2002). Brain-Computer Interfaces
for Communication and Control. Clinocal
Neurophysiology, 113, 767-791.
Meng, J., Zhang, S., Bekyo, A., Olsoe, J., Baxter, B., & He,
B. (2016). Noninvasive Electroencephalogram Based
Control of a Robotic Arm for Reach and Grasp Tasks.
Scientific Reports, 6(1), 38565. https://doi.org/10.1038/
srep38565.
Mu Li & Bao-Liang Lu. (2009). Emotion classification
based on gamma-band EEG. 2009 Annual International
Conference of the IEEE Engineering in Medicine and
Biology Society, 1223–1226. https://doi.org/10.1109/
IEMBS.2009.5334139.
Liu, Y.-H., Lin, L.-F., Chou, C.-W., Chang, Y., Hsiao, Y.-
T., & Hsu, W.-C. (2019). Analysis of
Electroencephalography Event-Related Desynchronisa-
tion and Synchronisation Induced by Lower-Limb
Stepping Motor Imagery. Journal of Medical and
Biological Engineering, 39(1), 54–69. https://doi.org/
10.1007/s40846-018-0379-9.
LeCun, Y., Bengio, Y., & Hinton, G. (2015). Deep learning.
Nature, 521(7553), 436–444. https://doi.org/10.1038/
nature14539.
Altaheri, H., Muhammad, G., Alsulaiman, M., Amin, S. U.,
Altuwaijri, G. A., Abdul, W., Bencherif, M. A., &
Faisal, M. (2023). Deep learning techniques for
classification of electroencephalogram (EEG) motor
imagery (MI) signals: A review. Neural Computing and
Applications, 35(20), 14681–14722. https://doi.org/
10.1007/s00521-021-06352-5.
Schirrmeister, R. T., Springenberg, J. T., Fiederer, L. D. J.,
Glasstetter, M., Eggensperger, K., Tangermann, M.,
Hutter, F., Burgard, W., & Ball, T. (2017). Deep
learning with convolutional neural networks for EEG
decoding and visualization. Human Brain Mapping,
38(11), 5391–5420. https://doi.org/10.1002/hbm.23730.
Lawhern, V. J., Solon, A. J., Waytowich, N. R., Gordon, S.
M., Hung, C. P., & Lance, B. J. (2018). EEGNet: A
compact convolutional neural network for EEG-based
brain–computer interfaces. Journal of Neural
Engineering, 15(5), 056013.
Dai, G., Zhou, J., Huang, J., & Wang, N. (2020). HS- CNN:
A CNN with hybrid convolution scale for EEG motor
imagery classification. Journal of Neural Engineering,
17(1), 016025. https://doi.org/10.1088/1741-2552/ab40
5f.
Borra, D., Fantozzi, S., & Magosso, E. (2020). Interpretable
and lightweight convolutional neural network for EEG
decoding: Application to movement execution and
imagination. Neural Networks, 129, 55–74.
https://doi.org/10.1016/j.neunet.2020.05.032.
Santamaria-Vazquez, E., Martinez-Cagigal, V., Vaquerizo-
Villar, F., & Hornero, R. (2020). EEG- Inception: A
Novel Deep Convolutional Neural Network for
Assistive ERP-Based Brain-Computer Interfaces. IEEE
Transactions on Neural Systems and Rehabilitation
Engineering, 28(12), 2773–2782. https://doi.org/10.11
09/TNSRE.2020.3048106.
Mirzabagherian, H., Menhaj, M. B., Suratgar, A. A., Talebi,
N., Abbasi Sardari, M. R., & Sajedin, A. (2023).
Temporal-spatial convolutional residual network for
decoding attempted movement related EEG signals of
subjects with spinal cord injury. Computers in Biology
and Medicine, 164, 107159. https://doi.org/10.1016/
j.compbiomed.2023.107159.
Amin, S. U., Altaheri, H., Muhammad, G., Abdul, W., &
Alsulaiman, M. (2022). Attention-Inception and Long-
Short-Term Memory-Based Electroencephalography
Classification for Motor Imagery Tasks in
Rehabilitation. IEEE Transactions on Industrial
Informatics, 18(8), 5412– 5421. https://doi.org/10.11
09/TII.2021.3132340.
Ingolfsson, T. M., Hersche, M., Wang, X., Kobayashi, N.,
Cavigelli, L., & Benini, L. (2020). EEG-TCNet: An
Accurate Temporal Convolutional Network for
Embedded Motor-Imagery Brain-Machine Interfaces.
https://doi.org/10.48550/ARXIV.2006.00622.
A Type of EEG-ITNet for Motor Imagery EEG Signal Classification
261

Altuwaijri, G. A., & Muhammad, G. (2022).
Electroencephalogram-Based Motor Imagery Signals
Classification Using a Multi-Branch Convolutional
Neural Network Model with Attention Blocks.
Bioengineering, 9(7), 323. https://doi.org/10.3390/bio
engineering9070323.
Salami, A., Andreu-Perez, J., & Gillmeister, H. (2022).
EEG-ITNet: An Explainable Inception Temporal
Convolutional Network for Motor Imagery
Classification. IEEE Access, 10, 36672–36685.
https://doi.org/10.1109/ACCESS.2022.3161489.
Kodera, J., Mouček, R., Moutner, P., Mochura, P., & Saleh,
J. Y. (2023). EEG motor imagery [dataset]. Zenodo.
https://doi.org/10.5281/ZENODO.7893847.
HEALTHINF 2024 - 17th International Conference on Health Informatics
262
