
Distributed Theory of Mind in Multi-Agent Systems
Heitor Henrique da Silva
1
, Michele Rocha
1
, Guilherme Trajano
1
, Anal
´
ucia Schiaffino Morales
1
,
Stefan Sarkadi
2
and Alison R. Panisson
1
1
Department of Computing, Federal University of Santa Catarina, Santa Catarina, Brazil
2
Department of Informatics, King’s College London, London, U.K.
Keywords:
Theory of Mind, Multi-Agent Systems, Distributed Theory of Mind.
Abstract:
Theory of Mind is a concept from developmental psychology which elucidates how humans mentalise. More
specifically, it describes how humans ascribe mental attitudes to others and how they reason about these mental
attitudes. In the area of Artificial Intelligence, Theory of Mind serves as a fundamental pillar in the design of
intelligent artificial agents that are supposed to coexist with humans within a hybrid society. Having the ability
to mentalise, these artificial agents could potentially exhibit a range of advanced capabilities that underlie
meaningful communication, including empathy and the capacity to better understanding the meaning behind
the utterances others make. In this paper, we propose a distributed theory of mind approach in multi-agent
systems, in which agents and human users share evidence to reach more supported conclusions about each
other’s mental attitudes. We demonstrate our approach in a scenario of stress detection, in which personal
agents infer whether their users are stressed or not according to the distributed theory of mind approach.
1 INTRODUCTION
Theory of Mind (ToM) plays a pivotal role in the field
of Artificial Intelligence as it bridges crucial gaps be-
tween our understanding of human cognition and the
development of intelligent autonomous systems. At
its core, ToM refers to the capacity to comprehend
and model the mental states of others, enabling us to
attribute, for example, beliefs, desires, intentions, and
emotions to them. This fundamental cognitive ability
has far-reaching implications across various scientific
disciplines, grounding phenomena related to empathy,
social interaction, and communication skills between
individuals. ToM has predominantly been studied in
humans, particularly in the context of cognitive devel-
opment (Goldman et al., 2012).
Particularly, in Multi-Agent Systems (MAS), ToM
plays a fundamental role in enhancing communica-
tion, fostering collaboration, detecting deceptive be-
haviour, and facilitating sophisticated human-agent
interaction. These phenomena demand sophisticated
reasoning mechanisms using the mental attitudes of
others. ToM is recognised as an indispensable com-
ponent in systems within the context of Hybrid Intel-
ligence (HI) and eXplainable AI (XAI) (Akata et al.,
2020).
Our work introduces an innovative approach to
distributed ToM, empowering agents not only to
model the mental attitudes of fellow agents, whether
they are software agents or human users, but also to
model ToM of those agents. Our approach incorpo-
rates a mechanism enabling agents to associate uncer-
tainty with the mental models within their ToM. Fur-
thermore, it enables the sharing of ToM and the aggre-
gation of diverse models to arrive at more robust in-
sights into the mental attitudes of other agents. In the
context of HI, we have developed a natural language
interface capable of inferring both users’ mental at-
titudes and users’ ToM. Our implementation is based
on the JaCaMo Framework (Boissier et al., 2013), and
we provide a case study in the domain of stress detec-
tion.
2 DISTRIBUTED ToM IN MAS
In this paper, we explore the distributed nature of ToM
in multi-agent systems, considering not only the phe-
nomena in which an agent is able to ascribe mental
attitudes to other agents (software agents and human
users) within the system but also the phenomena in
which these models can be communicated by agents.
This approach aims to achieve a more robust individ-
ual ToM, supported by multiple lines of evidence.
da Silva, H., Rocha, M., Trajano, G., Morales, A., Sarkadi, S. and Panisson, A.
Distributed Theory of Mind in Multi-Agent Systems.
DOI: 10.5220/0012563400003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 1, pages 451-460
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
451

To instantiate the ToM model proposed in this
work, we will utilise first-order predicates, similar
to those employed in knowledge representation in
Agent-Oriented Programming Language (AOPL). For
instance, we will use stressed(pietro) to denote
that ‘pietro is stressed,’ and similarly, we will use
likes(pietro,ice cream) to indicate that ‘pietro
likes ice cream.’
Furthermore, in this paper, we will employ the fol-
lowing notation to represent ToM, including a degree
of certainty, drawing inspiration from (Panisson et al.,
2018; Sarkadi et al., 2019):
• Bel
ag
(ϕ)
[γ]
means an agent ag believes an infor-
mation ϕ, with a degree of certainty denoted by
γ. For example, Bel
alice
(stressed(pietro))
[0.8]
means that alice believes pietro is stressed with a
degree of certainty of 0.8.
• Des
ag
(ϕ)
[γ]
means an agent ag desires ϕ with a
degree of certainty denoted by γ. For exam-
ple, Des
alice
(take day off(pietro))
[0.6]
means
that alice desires pietro to take the day off with a
degree of certainty of 0.6.
When employing a higher order of ToM, ϕ will
be instantiated with one of the previously mod-
elled mental attitudes from the ToM. For example,
Bel
ag
i
(Bel
ag
j
(ϕ))
[γ]
represents that an agent ag
i
be-
lieves that another agent ag
j
believes in information
ϕ, with γ indicating the degree of certainty regarding
this information
1
.
Communication between agents is grounded in
the speech act theory (Austin, 1975). In the context
of Agent Communication Languages (ACL), a mes-
sage, in its basic form, consists of a pair that includes
a performative and content (Mayfield et al., 1995;
FIPA, 2008), in which the performative provides the
sender’s intention in the communication. In this pa-
per, we adopt the following notation to represent com-
munication: ⟨ag
i
, ag
j
, pfm, ϕ⟩, where ag
i
represents
the sender, and ag
j
represents the message’s target
(receiver), pfm indicates the chosen performative, and
ϕ the content of the message.
2.1 Ascribing ToM
Communication is a natural method for acquiring and
updating a ToM regarding other individuals. This
principle has also been applied to agent (software)
communication (Panisson et al., 2019). It is a fun-
damental principle. When someone provides us with
some piece of information, such as they liking for ice
cream, we can construct a ToM in which that piece of
1
We consider that γ incorporates the degree of certainty
from the nested predicates, as we will discuss later.
information is present, keeping in mind that the per-
son believes they like ice cream. However, it is worth
noting that individuals may not always be completely
honest in their speech, so there is a degree of certainty
associated with modelling mental attitudes from com-
munication. This degree of certainty can be inferred
from various contexts, including the level of trust we
place in the person or their expertise in the subject
they are discussing. Some valuable insights in this
area can be found in the literature on argumentation-
based reasoning, as explored in works by (Parsons
et al., 2012; Walton et al., 2008; Melo et al., 2016;
Melo et al., 2017). This is why we incorporate γ into
our ToM model, representing a degree of certainty an
agent assigns to the information it infers about others’
mental attitudes.
For example, when an agent named ag
i
receives a
message ⟨ag
j
, ag
i
, tell, ϕ⟩, i.e., a message from agent
ag
j
, with the tell performative and the content ϕ, ag
i
is able to infer that ag
j
believes on what it is telling,
adding Bel
ag
j
(ϕ)
[γ]
to its ToM model. We use the fol-
lowing semantics for agent communication:
• ⟨ag
i
, ag
j
, tell, ϕ⟩ |= Bel
ag
i
(ϕ)
[γ]
, meaning that when
an agent ag
j
receives a message from another agent
ag
i
, with the performormative tell and a content ϕ,
it will model that ag
i
believes on ϕ, i.e., Bel
ag
i
(ϕ)
[γ]
.
• ⟨ag
i
, ag
j
, achieve, ϕ⟩ |= Des
ag
i
(ϕ)
[γ]
, meaning that
when an agent ag
j
receives a message from an-
other agent ag
i
, with the performormative achieve
and a content ϕ, it will model that ag
i
desires ϕ, i.e.,
Des
ag
i
(ϕ)
[γ]
.
When considering human-computer (agent) com-
munication, γ may also be associated with the cer-
tainty of the natural language interface correctly iden-
tifying what the human user has communicated or
even combining various uncertainties related to that
information. For example, this might involve assess-
ing how much trust we place in the person commu-
nicating that piece of information and the uncertainty
associated with the natural language interface’s com-
prehension of that person’s statements.
At some point, an agent may possess in its ToM
a sequence or trace of inferred mental models about
other agents. For instance, it may model that agent
ag believes in ϕ, denoted as Bel
ag
(ϕ)
[γ]
but at differ-
ent moments and with different degrees of certainty.
This consideration takes into account the different in-
stants it has interacted with that agent and when it
has modelled their mental attitudes through interac-
tions. These time-related (meta)information are rep-
resented here by the timestamps t
1
, . . . , t
n
annotated in
the pieces of information aggregated by the generic
operator ⊕, as defined in equation (1).
EAA 2024 - Special Session on Emotions and Affective Agents
452

Bel
ag
(ϕ)
[γ]
= Bel
ag
(ϕ)
[γ
1
,t
1
]
⊕. . . ⊕Bel
ag
(ϕ)
[γ
n
,t
n
]
(1)
There are numerous ways to implement the oper-
ator ⊕, taking into account not only the application
domain but also various agent profiles. These profiles
may also reflect domain-specific requirements. For
instance, there could be agents that only consider the
most recent information, or those that take into ac-
count the entire history or ‘trace’ of information.
In this paper, as we explore different possible in-
stantiations of ⊕, we will demonstrate two of the most
straightforward choices in our examples.
Definition 2.1 (Time-Concerned Agent). A time-
concerned agent prioritises the most up-to-date infor-
mation extracted from the traces of a particular mental
attitude from its ToM, ignoring multiples occurrences
of that information, as defined in Equation (2):
Bel
ag
(ϕ)
[γ]
= argmax
t
Bel
ag
(ϕ)
[γ,t]
(2)
in which the agent will consider the most recently up-
dated model, specifically, the last information it has
modelled.
Definition 2.2 (Trace-Concerned Agent). A trace-
concerned agent prioritises the higher degree of cer-
tainty of a mental attitude extracted from the trace
from its ToM, as defined in equation (3):
Bel
ag
(ϕ)
[γ]
= argmax
γ
Bel
ag
(ϕ)
[γ,t]
(3)
in which the agent will consider the mental attitude
with higher degree of certainty in the trace.
After understanding a particular modelled men-
tal attitude and calculating a degree of certainty as-
sociated to it, agents can combine multiple modelled
mental attitudes that support the same piece of infor-
mation. In other words, agents can integrate different
theories of mind by checking if a piece of informa-
tion is consistent with the majority of the agents they
have interacted with. For example, an agent ag up-
dates its own ToM about a piece of information, de-
noted as Bel
ag
(ϕ)
[γ]
, based on other theories of mind
modelled from different agents. These include the set
of modelled attitudes Bel
ag
1
(ϕ)
[γ
1
]
, . . . , Bel
ag
n
(ϕ)
[γ
n
]
from agents ag
1
, . . . , ag
n
. Equation 4 defines the gen-
eral operator ⊗ that can be instantiated according
to the specific interests of the application domain or
when defining different agent profiles.
Bel
ag
(ϕ)
[γ]
= Bel
ag
1
(ϕ)
[γ
1
]
⊗ . . . ⊗ Bel
ag
n
(ϕ)
[γ
n
]
(4)
In this paper, we will consider the instantiation
provided in Equation (5), which aims to penalize the
degree of certainty when conflicting models are found
but rewards it when no conflicting model is present, as
follow:
Bel
ag
(ϕ)
[γ]
| γ = δ + (1 − δ) · κ ·
|S
+
ϕ
| − |S
−
ϕ
|
|S
+
ϕ
| + |S
−
ϕ
|
(5)
with
δ =
∑
s∈S
+
ϕ
γ | Bel
s
(ϕ)
[γ]
|S
+
ϕ
| + |S
−
ϕ
|
in which S
+
ϕ
= {s
1
, ..., s
n
} is the set of n different
agents that believe ϕ and S
−
ϕ
is the set different agents
that believe ϕ (i.e., its complement). In Equation (5),
κ ·
|S
+
ϕ
|−|S
−
ϕ
|
|S
+
ϕ
|+|S
−
ϕ
|
rewards (increases) the certainty regard-
ing a particular piece of information when there is
more evidences in |S
+
ϕ
|. A larger value of κ will make
the degree of certainty more sensitive to the difference
between positive and negative occurrences, while a
smaller value of κ will make it less sensitive.
In Figure 1, we can observe the behaviour of
Equation (5). We have fixed γ = 0.8 for all evidences.
On the x-axis (horizontal), we show the range of ev-
idences for |S
+
ϕ
|, varying from 0 to 10, and simulta-
neously, the range of evidence in |S
−
ϕ
|, which varies
from 0 to 2. In other words, when there is 5 pieces
of evidence in |S
+
ϕ
|, there is 1 piece of evidence in
|S
−
ϕ
|, and when there is 10 pieces of evidence in |S
+
ϕ
|,
there are 2 evidence at |S
−
ϕ
|. On the y-axis (depth),
we display the range of κ values, ranging from 0.1 to
0.9. The z-axis (vertical) shows the final degree of
certainty. We can observe that the degree of certainty
decreases rapidly with contrary evidences. However,
it is possible to compensate for this effect by using
a higher value for κ, making it more sensitive to the
difference between positive and negative evidences.
2.2 Distributing ToM
In this section, we introduce an approach that agents
can employ to share mental attitude from their theo-
ries of mind, facilitating the creation of a distributed
ToM. To enable agents to share their ToM, we have
introduced a new performative named share tom, and
its semantics is provided below:
• ⟨ag
i
, ag
k
, share tom, Bel
ag
j
(ϕ)
[γ]
⟩ |= Bel
ag
j
(ϕ)
[γ]
,
meaning that when an agent ag
k
receives message
from another agent ag
i
, with the performative
share tom and the content Bel
ag
j
(ϕ)
[γ]
, it will add
that information to its own ToM.
When striving to establish a distributed ToM
across all agents within a multi-agent system, one ap-
proach involves creating a shared ToM for the entire
Distributed Theory of Mind in Multi-Agent Systems
453

Figure 1: Equation (5) behaviour with γ fixed at 0.8 for all
evidences, |S
+
ϕ
| ranging from 0 to 10 evidences and |S
−
ϕ
|
ranging from 0 to 2 evidences (parallelly to |S
+
ϕ
|).
system. This is achieved by having agents broadcast
their mental attitudes from their private ToM using the
performative share tom. With the proposed seman-
tics, all agents should converge to a state
2
of ToM, ef-
fectively establishing a common distributed ToM for
the system. However, this approach can be highly
inefficient in systems where agents continuously add
and update mental attitudes from others to their in-
dividual ToMs, requiring they continually broadcast
this new and updated information. Additionally, other
agents need to aggregate this new information into
their own ToMs, leading to a cycle of continuous up-
dates and broadcasts.
To address this efficiency concern, we introduce
the concept of Relevant Distributed ToM (RDToM).
RDToM represents a distributed ToM containing in-
formation that is specifically relevant to a particular
agent. Each agent maintains its RDToM, filtering and
retaining only the information that is pertinent to its
context. Agents also selectively share information,
transmitting only the data that is relevant to other spe-
cific agents. Then, the RDToM is utilised by the agent
for reasoning and decision-making.
3 CASE STUDY
In this section, we present a case study in the domain
of stress detection. There are various professions,
2
They should converge to this state aggregating all in-
formation exchanged using the Equation (5), considering all
agents share their private ToM.
and each encounters unique challenges that can cause
stress. For instance, office workers engage in de-
manding knowledge work that requires formal train-
ing, high productivity, and creativity, and a stressful
condition can affect professional productivity (Awada
et al., 2023). Employees with jobs requiring signifi-
cant mental or physical effort are susceptible to stress,
leading to poor performance, mental health issues,
and disrupted sleep (Masri et al., 2023). Health work-
ers, in particular, carry a heavy workload and are at
a higher risk of infection, especially during events
such as those experienced recently with the COVID-
19 pandemic (Morales et al., 2022b). Several fac-
tors can contribute to occupational stress, such as in-
creased anxiety, frequent injuries, insomnia, and envi-
ronmental stressors, which are often associated with
the workplace. Recently, studies have explored dif-
ferent perspectives for stress measurement, including
physiological (biomarkers) (Morales et al., 2022c),
psychological, and behavioral aspects (Masri et al.,
2023). Differentiating between positive stress (eu-
stress) and negative stress (distress) can be quite chal-
lenging because their physical symptoms may seem
similar. However, the main difference lies in the
emotional and psychological response (Betti et al.,
2018). A subjective method of measuring stress is
self-reported stress or perceived stress. These instru-
ments typically involve questionnaires and scoring
systems to identify stress or similar disorders. Ex-
amples include the Perceived Stress Scale, Relative
Stress Scale, Brief Symptom Inventory, and others
(Sharma and Gedeon, 2012). However, it is worth
noting that using questionnaires, especially in a work-
place setting, can interrupt the user’s workflow. The
impact of these instruments on outcomes is discussed
in more detail in (Masri et al., 2023).
Numerous studies have been conducted to identify
and diagnose stress. For example, researchers have
explored the use of biomarkers associated with ma-
chine learning and deep learning algorithms to diag-
nose data collected from wearable devices. To mon-
itor mental health and capture social signals, some
wearable devices must be equipped with multiple sen-
sors that work continuously (Morales et al., 2022a).
The difference between positive and negative stress
has been also investigated due to the complexity of
stress detection considering the emotional, physical,
and behavioral markers (Pluut et al., 2022). Among
the most commonly reported symptoms of stress in
these studies are difficulty sleeping, rapid heartbeat,
sweating, and mood changes. Various physiological
measures have been utilised to detect stress, includ-
ing skin conductance, heart rate, skin and body tem-
peratures, electrocardiogram signals, and electroen-
EAA 2024 - Special Session on Emotions and Affective Agents
454
cephalograms (Giannakakis et al., 2022). It is not
possible to detect stress conditions with a single au-
tomated approach, so it is necessary to combine mul-
tiple approaches, such as sensors for physiological
information and multi-agents for emotional informa-
tion, to identify stress conditions. A precise approach
should take physiological, psychological, emotional,
and behavioral factors into account. Moreover, indi-
vidual differences in stress reactions must also be con-
sidered. According to the data, accurate identification
of stress conditions requires a comprehensive and in-
dividualized approach.
In this context, we have applied our approach to
the domain of stress detection, where a multi-agent
system interacts with a group of people working to-
gether. Each individual has a personal agent with
whom they interact through a natural language inter-
face implemented using chatbot technologies. Using
the chatbot, each user can share their opinions about
whether their co-workers are stressed. In addition,
the personal agent has the capacity to recognize the
stress level of its user. It accomplishes this by com-
bining its user’s theory (whether the user is stressed
or not) with theories from other personal agents that
have shared information about its user. Mary’s per-
sonal agent may receive information from Paul’s per-
sonal agent, indicating that Mary is stressed based on
Paul’s observations. These shared theories contribute
to the personal agent’s overall understanding. It is
important to note that our approach, while primarily
considering explicit user interactions regarding stress,
also allows agents to consider other inputs. For in-
stance, a computer vision agent can inform personal
assistant agents when it believes someone in the group
is stressed, with a degree of certainty extracted from
its precision in identifying that information.
3.1 Ascribing ToM to Users Using
Chatbot Technologies
To facilitate interaction with their users, the assistant
agents in our case study are equipped with a natural
language understanding interface provided by chat-
bot technologies, specifically using the open-source
Rasa framework
3
. Chatbot technologies have been
proposed in the literature as a promising and practical
approach to implementing natural language interfaces
within multi-agent systems. For example, integrat-
ing JaCaMo Framework (Boissier et al., 2013) with
Dialogflow
4
(Engelmann et al., 2021). In this work,
we follow a similar approach by using the JaCaMo
3
https://rasa.com/
4
https://cloud.google.com/dialogflow
framework to implement multi-agent systems, utilis-
ing CArtAgO artifacts (Ricci et al., 2011) integrated
with Rasa framework, and a chatbot technology. This
integration serves to create a natural language inter-
face between agents and users, enabling one form of
scalable agent-agent interoperability (Sarkadi et al.,
2022).
In essence, a natural language unit was trained to
identify the user’s intention during their interaction
and extract relevant entities from these communica-
tions. In this particular case study, the agents are in-
terested in identifying two user intention, named:
• Inform Self Stress: when a user informs their per-
sonal agent that they are stressed.
• Inform Other’s Stress: when a user informs their
personal agent that a coworker is stressed.
While identifying the intention of the user be-
hind their interactions is sufficient to inform self
stress, when the user intends to inform others about
stress, the natural language unit also extracts the
coworker’s name as an entity. Subsequently, this ex-
tracted information is made available to the user’s
personal agent, according to the semantics of the
tell performative introduced in Section 2, inferring
what the user believes regarding their own and their
coworker’s stress. For example, when Mary’s per-
sonal agent identify that Mary is informing self stress,
it adds the belief that Mary is stressed to its ToM,
i.e., Mary’s personal agent will include the belief
Bel
mary
(stressed(mary))
[0.9]
in its ToM. Here, as
an example, we instantiate γ with the precision re-
turned from the natural language unit’s classifica-
tion of the user’s intention
5
, in this particular ex-
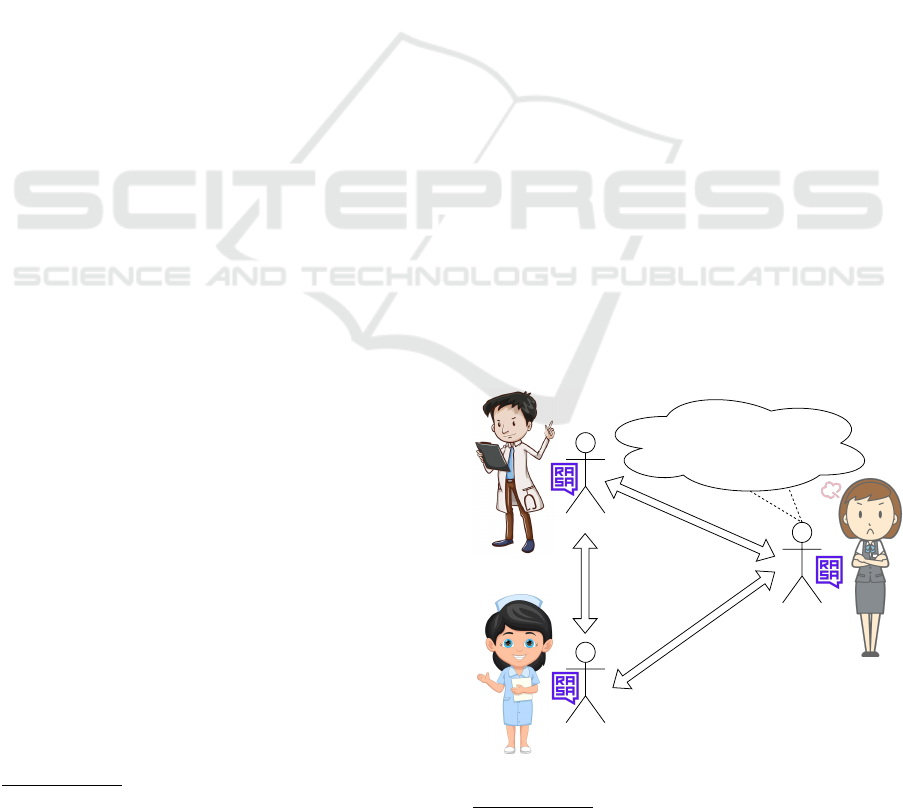
Mary
Peter
Jane
believes(jane,stressed(jane))[0.8]
believes(peter,stressed(jane))[0.6]
believes(mary,stressed(jane))[0.7]
Jane
Mary
Peter
Figure 2: Scenario.
5
However, as described in previous sections, a more so-
Distributed Theory of Mind in Multi-Agent Systems
455

stressed
[0.4]
stressed
[0.4]
− − −
stressed
[0.8]
− − − − − −
stressed
[0.4]
− − −
stressed
[0.4]
− − − − − − − − −
− − −
stressed
[0.4]
− − − − − −
stressed
[0.6]
stressed
[0.7]
− − −
stressed
[0.4]
− − − − − −
stressed
[0.4]
− − −
stressed
[0.4]
− − − − − − − − −
− − −
stressed
[0.4]
− − − − − −
stressed
[0.5]
− − −
stressed
[0.5]
stressed
[0.3]
− − − − − −
stressed
[0.4]
− − −
stressed
[0.4]
− − − − − − − − −
− − −
stressed
[0.4]
− − − − − −
Ag
1
Ag
2
Ag
3
Ag
4
Ag
1
stressed
[0.6]
stressed
[0.7]
stressed
[0.5]
stressed
[0.8]
Ag
2
− − − − − −
stressed
[0.3]
− − −
Ag
3
stressed
[0.6]
− − −
stressed
[0.9]
− − −
Ag
4
− − − − − −
stressed
[0.5]
− − −
t
n−2
t
n−1
t
n
Figure 3: Distributed ToM Progress.
ample, γ = 0.9. Furthermore, when Mary’s per-
sonal agent identifies that Mary is reporting that Jane
is stressed, it adds the belief that Mary believes
Jane is stressed to its ToM, i.e., Mary’s personal
agent adds Bel
mary
(stressed(jane))
[0.7]
in its ToM,
where γ = 0.7. In our implementation, this infor-
mation is represented using first-order predicates as
follow: believes(mary,stressed(mary))[0.9]
and believes(mary,stressed(jane))[0.7], re-
spectively, as it also can be observed in Figure 2.
3.2 Scenario
To evaluate our approach to distributed ToM, we con-
ducted various experiments simulating a group of four
individuals working together, named Ag
1
, Ag
2
, Ag
3
,
and Ag
4
. These individuals interacted with their per-
sonal assistants and shared information about their
own stress levels and stress levels of their colleagues.
The personal agents are named according to their re-
spective users, meaning that the personal agent for
Ag
1
is also named Ag
1
. The multi-agent system mod-
els only the mental attitudes of the users.
Furthermore, agents exclusively share mental at-
titudes about the users with the users’ personal assis-
tants. In other words, when a specific agent, such as
Ag
2
, models information in its ToM regarding Ag
1
,
i.e., information about Ag
1
as its user, it sends that
mental attitude to Ag
1
. However, if Ag
2
models in-
formation concerning its own user, it does not share
that information. In this scenario, users’ informa-
tion is relevant only to their respective personal as-
sistants. Personal assistants aggregate the distributed
ToM in order to reach a more supported conclusion
phisticated degree of certainty can be implemented to suit
the application’s needs.
about user’s stress.
For example, in Figure 3, we demonstrate a sce-
nario in which four agents interact with their users in
order to identify their own or their coworkers stress
levels, sharing that information with other agents
when relevant. In Figure 3, γ represents the preci-
sion returned by the natural language interface in un-
derstanding the user’s messages. The 4 tables (in
depth) in the figure represent discrete point in time
(three different timestamp), resulting in the final dis-
tributed ToM model at forefront in Figure 3. To sim-
plify the representation in Figure 3, rows in the tables
represent the agents (and their respective user), and
columns represent the target users (and their respec-
tive agents) of the ToM model. For example, in the
front table of Figure 3, the entry in the first row and
first column is stressed
[0.6]
, signifying that Ag
1
be-
lieves that Ag
1
is stressed, with a degree of certainty
of 0.6, i.e., Bel
Ag
1
(stressed(Ag
1
))
[0.6]
in our formal
model.
In this particular scenario, agent Ag
1
has inter-
acted with its user (also referred to as Ag
1
), adding
models about the user being stressed to its ToM at
each interaction, i.e., Bel
Ag
1
(stressed(Ag
1
))
[γ]
. Us-
ing these models, the agent can infer a final model
Bel
Ag
1
(stressed(Ag
1
))
[0.6]
, in which this degree of
certainty is derived from trace of interactions, as rep-
resented by the tables at the back. In this particular ex-
ample, agents are trace-concerned agents, according
to definition 2.2, utilising Equation (2), with γ = 0.6
calculated as follow:
Bel
Ag
1
(stressed(Ag
1
))
[0.6]
=
argmax
γ
Bel
Ag
1
(stressed(Ag
1
))
[0.4,t
n−2
]
Bel
Ag
1
(stressed(Ag
1
))
[0.6,t
n−1
]
Bel
Ag
1
(stressed(Ag
1
))
[0.5,t
n
]
EAA 2024 - Special Session on Emotions and Affective Agents
456

Additionally, Ag
1
’s user has mentioned, at some
point, that their coworkers, named Ag
2
, Ag
3
, and Ag
4
,
are stressed as well. As a result, Ag
1
has the follow-
ing models in its ToM: Bel
Ag
1
(stressed(Ag
2
))
[0.7]
,
Bel
Ag
1
(stressed(Ag
3
))
[0.5]
,
Bel
Ag
1
(stressed(Ag
4
))
[0.8]
. Similarly, Ag
1
has
aggregated the multiple evidences its user has pro-
vided about the coworkers using Equation (2), for
example, inferring the Ag
2
’s stress, as follow:
Bel
Ag
1
(stressed(Ag
2
))
[0.7]
=
argmax
γ
Bel
Ag
1
(stressed(Ag
2
))
[0.4,t
n−2
]
Bel
Ag
1
(stressed(Ag
2
))
[0.7,t
n−1
]
In Figure 3, we also observe that Ag
2
has informed
that Ag
3
is stressed, Ag
3
has informed Ag
1
and it-
self are stressed, and Ag
4
has informed that Ag
3
is
stressed. All pieces of evidence are aggregated for
these agents according to Equation (2), resulting on
the distributed ToM shown at the front table of Fig-
ure 3.
Of course, as mentioned in Section 2.1, different
agents profiles could be considered, according to the
application needs. For example, when using Equa-
tion (3) instead of Equation (2), i.e., agents care more
about the most updated information from the trace, we
would have Bel
Ag
1
(stressed(Ag
1
))
[γ]
with γ = 0.5
calculated as follow:
Bel
Ag
1
(stressed(Ag
1
))
[0.5]
=
argmax
t
Bel
Ag
1
(stressed(Ag
1
))
[0.4,t
n−2
]
Bel
Ag
1
(stressed(Ag
1
))
[0.6,t
n−1
]
Bel
Ag
1
(stressed(Ag
1
))
[0.5,t
n
]
After agents aggregating those information mod-
elled in their ToM, they are capable of sharing those
models with other agents, as introduced in Sec-
tion 2.2. In our case study, agents will share those
information with agents for whom their users are the
subjects of the model. In other words, agents rep-
resented by the rows in the from table in Figure 3
will share these models with agents represented by
the columns in the front table of Figure 3. When all
agents share information related to other agents, they
collectively reach a RDToM that corresponds to the
columns in the front table of Figure 3. For example,
when all agents share with Ag
3
what Ag
3
’s cowork-
ers think about whether they are stressed or not, agent
Ag
3
will have the following
6
RDToM:
6
Corresponding to the column labelled as Ag
3
in Fig-
ure 3.
RDToM
Ag
3
=
Bel
Ag
1
(stressed(Ag
3
))
[0.5]
Bel
Ag
2
(stressed(Ag
3
))
[0.3]
Bel
Ag
3
(stressed(Ag
3
))
[0.9]
Bel
Ag
4
(stressed(Ag
3
))
[0.5]
Subsequently, Ag
3
aggregates these models from
its RDToM using the Equation (5), reaching
Bel
dtom
(stressed(Ag
3
))
[0.82]
, with κ = 0.6. Sim-
ilarly, Ag
1
reaches Bel
dtom
(stressed(Ag
1
))
[0.84]
,
Ag
2
reaches Bel
dtom
(stressed(Ag
2
))
[0.88]
, and Ag
4
reaches Bel
dtom
(stressed(Ag
2
))
[0.92]
4 PROPERTIES
An inherent property of our approach is the ability
of agents to combine both software agents’ and
humans users’ ToM. When an agent directly interacts
with a human user, it can model a ToM about that
user, for example, Bel
user1
(stressed(user1))
[0.8]
.
When the user informs other members of the
working group, their personal agent can model
its user’s ToM about other individuals, i.e.,
Bel
user1
(stressed(user2))
[0.8]
. By sharing this
information with other assistants, they can combine
their ToM about their user with the ToM of other
users about their user. For instance, user1’s personal
agent models Bel
user1
(stressed(user1))
[0.8]
and
receives Bel
user2
(stressed(user1))
[0.7]
, indicating
that another user believes user1 is stressed. This in-
formation can then be combined using Equation (5).
Also, our approach allow agents to reach (Relevant)
Distributed ToM.
Agents reach a distributed ToM. When a group of
agents {ag
1
, ag
2
. . . , ag
n
} have N mental attitudes in
their respective ToM about another agent ag
j
, they
can collectively reach a distributed ToM about ag
j
executing broadcast messages using the performa-
tive share tom, as defined in its semantics in Section
2.2.
Agents reach a Relevant Distributed ToM. When a
group of agents {ag
1
, ag
2
. . . , ag
n
} have N mental
attitudes in their ToM about another agent ag
j
, and
these mental attitudes are relevant to a particular
agent ag
i
, ag
i
can reach a RDToM about ag
j
receiv-
ing N messages from {ag
1
, ag
2
. . . , ag
n
} with the
performative share tom, as defined in its semantics
in Section 2.2.
Distributed Theory of Mind in Multi-Agent Systems
457

5 RELATED WORK
A concise overview of how ToM has been applied
in agent-based modelling and multi-agent systems is
given in (Rocha et al., 2023).
There are works representing ToM in AOPL, such
as (Cantucci and Falcone, 2020; Cantucci and Fal-
cone, 2022) representing ToM in JaCaMo (Boissier
et al., 2013), (Harbers et al., 2011) representing
ToM in 2APL (Dastani, 2008), and (Chang and Soo,
2008) representing ToM in JADE (Bellifemine et al.,
2005). Additionally, the work by (Montes et al., 2022;
Montes et al., 2023) introduces an abductive reason-
ing approach for argumentation and ToM in AOPLs,
while (Mosca et al., 2020; Mosca and Such, 2022)
emphasises the need for ToM in generating social
explanations based on decisions reached through ab-
duction and value-based argumentation in multi-agent
scenarios. Also, there are works using ToM to repre-
sent emotions, which is close to our case study (Feng
et al., 2019; Reisenzein et al., 2013). Furthermore,
there are works that use propositional logic and text
to represent ToM (Gebhard et al., 2018; Walton, 2019;
Husemann et al., 2022).
Our approach is based on the idea of a collective
Theory of Mind (Shteynberg et al., 2023). The work
closest to our approach is that of (Westby and Riedl,
2023) who used an approach for developing a network
of Bayesian agents that collectively model the mental
states of teammates from the observed communica-
tion. (Westby and Riedl, 2023) calibrate their model
on human experiments to show how humans model
themselves and their mental state as a collective.
Our work distinguishes itself from all of the above
because we propose an approach for distributed ToM
in which agents can model and aggregate not only
the mental attitudes of software or AI agents but also
those of human users in the same multi-agent sys-
tem. We model the Theory of a Collective Mind of
a Hybrid Society, e.g. a society where both humans
and machines are socially interactive agents (Sarkadi
et al., 2021; Sarkadi, 2023).
6 CONCLUSION
In this work, we have presented an approach for
distributed ToM within MAS. Specifically, we in-
troduced the concept of Relevant Distributed ToM,
where agents selectively share information that is rel-
evant to other agents within the system, and only with
those agents for whom the information should be rel-
evant.
We have demonstrated our approach through a
case study focused on stress detection. In this case
study, agents were capable to aggregate multiple men-
tal models from the distributed ToM, allowing them
to draw more robust conclusions about users’ stress
levels. The case study incorporates a natural lan-
guage interface implemented using chatbot technolo-
gies. By interacting with users through this interface,
agents not only model the mental attitudes of the users
but also the users’ ToM regarding their coworkers.
Agents then share this ToM to support personal agents
in making inferences about their users’ stress levels.
While our case study focuses on simulating user
interactions to demonstrate the proposed approach,
our future work aims to conduct evaluations in real-
life scenarios where human users directly interact
with the system.
REFERENCES
Akata, Z., Balliet, D., de Rijke, M., Dignum, F., Dignum,
V., Eiben, G., Fokkens, A., Grossi, D., Hindriks, K.,
Hoos, H., et al. (2020). A research agenda for hy-
brid intelligence: Augmenting human intellect with
collaborative, adaptive, responsible, and explainable
artificial intelligence. Computer, 53(8):18–28.
Austin, J. L. (1975). How to do things with words, vol-
ume 88. Oxford university press.
Awada, M., Becerik-Gerber, B., Lucas, G., and Roll, S. C.
(2023). Predicting office workers; productivity: A
machine learning approach integrating physiological,
behavioral, and psychological indicators. Sensors,
23(21).
Bellifemine, F., Bergenti, F., Caire, G., and Poggi, A.
(2005). Jade—a java agent development framework.
Multi-agent programming: Languages, platforms and
applications, pages 125–147.
Betti, S., Lova, R. M., Rovini, E., Acerbi, G., Santarelli, L.,
Cabiati, M., Ry, S. D., and Cavallo, F. (2018). Evalua-
tion of an integrated system of wearable physiological
sensors for stress monitoring in working environments
by using biological markers. IEEE Transactions on
Biomedical Engineering, 65(8):1748–1758.
Boissier, O., Bordini, R. H., H
¨
ubner, J. F., Ricci, A., and
Santi, A. (2013). Multi-agent oriented programming
with jacamo. Science of Computer Programming,
78(6):747–761.
Cantucci, F. and Falcone, R. (2020). Towards trustwor-
thiness and transparency in social human-robot inter-
action. In 2020 IEEE International Conference on
Human-Machine Systems (ICHMS), pages 1–6. IEEE.
Cantucci, F. and Falcone, R. (2022). Collaborative auton-
omy: Human–robot interaction to the test of intelli-
gent help. Electronics, 11(19):3065.
Chang, H.-M. and Soo, V.-W. (2008). Simulation-based
story generation with a theory of mind. In Proceed-
ings of the AAAI Conference on Artificial Intelligence
EAA 2024 - Special Session on Emotions and Affective Agents
458

and Interactive Digital Entertainment, volume 4(1),
pages 16–21.
Dastani, M. (2008). 2apl: a practical agent programming
language. Autonomous agents and multi-agent sys-
tems, 16:214–248.
Engelmann, D., Damasio, J., Krausburg, T., Borges, O.,
Colissi, M., Panisson, A. R., and Bordini, R. H.
(2021). Dial4jaca–a communication interface be-
tween multi-agent systems and chatbots. In Int. con-
ference on practical applications of agents and multi-
agent systems, pages 77–88. Springer.
Feng, D., Carstensdottir, E., El-Nasr, M. S., and Marsella,
S. (2019). Exploring improvisational approaches to
social knowledge acquisition. In Int. Conference on
Autonomous Agents and MultiAgent Systems.
FIPA, T. (2008). Fipa communicative act library specifi-
cation. Foundation for Intelligent Physical Agents,
http://www. fipa. org/specs/fipa00037/SC00037J. html
(30.6. 2004).
Gebhard, P., Schneeberger, T., Baur, T., and Andr
´
e, E.
(2018). Marssi: Model of appraisal, regulation, and
social signal interpretation. In International confer-
ence on Autonomous agents and multi-agent systems.
Giannakakis, G., Grigoriadis, D., Giannakaki, K., Simanti-
raki, O., Roniotis, A., and Tsiknakis, M. (2022). Re-
view on psychological stress detection using biosig-
nals. IEEE Transactions on Affective Computing,
13(1):440–460.
Goldman, A. I. et al. (2012). Theory of mind. The Oxford
handbook of philosophy of cognitive science, 1.
Harbers, M., van den Bosch, K., and Meyer, J.-J. C. (2011).
Agents with a theory of mind in virtual training. In
Multi-Agent Systems for Education and Interactive
Entertainment: Design, Use and Experience, pages
172–187. IGI Global.
Husemann, S., P
¨
oppel, J., and Kopp, S. (2022). Differences
and biases in mentalizing about humans and robots. In
IEEE International Conference on Robot and Human
Interactive Communication, pages 490–497.
Masri, G., Al-Shargie, F., Tariq, U., Almughairbi, F., Ba-
biloni, F., and Al-Nashash, H. (2023). Mental stress
assessment in the workplace: A review. IEEE Trans-
actions on Affective Computing, pages 1–20.
Mayfield, J., Labrou, Y., and Finin, T. W. (1995). Evalua-
tion of kqml as an agent communication language. In
Wooldridge, M., M
¨
uller, J. P., and Tambe, M., editors,
ATAL, volume 1037, pages 347–360. Springer.
Melo, V. S., Panisson, A. R., and Bordini, R. H.
(2016). Argumentation-based reasoning using pref-
erences over sources of information. In International
Conference on Autonomous Agents & Multiagent Sys-
tems, 2016, Cingapura.
Melo, V. S., Panisson, A. R., and Bordini, R. H. (2017).
Meta-information and argumentation in multi-agent
systems. iSys-Brazilian Journal of Information Sys-
tems, 10(3):74–97.
Montes, N., Luck, M., Osman, N., Rodrigues, O., and
Sierra, C. (2023). Combining theory of mind and ab-
ductive reasoning in agent-oriented programming. Au-
tonomous Agents and Multi-Agent Systems, 37(2):36.
Montes, N., Osman, N., and Sierra, C. (2022). Combining
theory of mind and abduction for cooperation under
imperfect information. In European Conference on
Multi-Agent Systems, pages 294–311. Springer.
Morales, A., Barbosa, M., Mor
´
as, L., Cazella, S. C., Sgobbi,
L. F., Sene, I., and Marques, G. (2022a). Occupational
stress monitoring using biomarkers and smartwatches:
A systematic review. Sensors, 22(17).
Morales, A. S., de Oliveira Ourique, F., Mor
´
as, L. D.,
Barbosa, M. L. K., and Cazella, S. C. (2022b). A
Biomarker-Based Model to Assist the Identification
of Stress in Health Workers Involved in Coping with
COVID-19, pages 485–500. Springer.
Morales, A. S., de Oliveira Ourique, F., Mor
´
as, L. D., and
Cazella, S. C. (2022c). Exploring Interpretable Ma-
chine Learning Methods and Biomarkers to Classify-
ing Occupational Stress of the Health Workers, pages
105–124. Springer International Publishing, Cham.
Mosca, F., Sarkadi, S¸., Such, J. M., and McBurney, P.
(2020). Agent expri: Licence to explain. In Explain-
able, Transparent Autonomous Agents and Multi-
Agent Systems: Second International Workshop, EX-
TRAAMAS 2020, Auckland, New Zealand, May 9–13,
2020, Revised Selected Papers 2, pages 21–38.
Mosca, F. and Such, J. (2022). An explainable assistant
for multiuser privacy. Autonomous Agents and Multi-
Agent Systems, 36(1):10.
Panisson, A., Sarkadi, S., McBurney, P., Parsons, S., and
Bordini, R. (2018). Lies, bullshit, and deception in
agent-oriented programming languages. In Proc. of
the 20th International Trust Workshop, pages 50–61.
Panisson, A. R., Sarkadi, S., McBurney, P., Parsons, S., and
Bordini, R. H. (2019). On the formal semantics of
theory of mind in agent communication. In Agree-
ment Technologies: 6th International Conference, AT
2018, Bergen, Norway, December 6-7, 2018, Revised
Selected Papers 6, pages 18–32. Springer.
Parsons, S., Atkinson, K., Haigh, K. Z., Levitt, K. N.,
McBurney, P., Rowe, J., Singh, M. P., and Sklar, E.
(2012). Argument schemes for reasoning about trust.
COMMA, 245:430.
Pluut, H., Curs
,
eu, P. L., and Fodor, O. C. (2022). Develop-
ment and validation of a short measure of emotional,
physical, and behavioral markers of eustress and dis-
tress (meds). Healthcare, 10(2).
Reisenzein, R., Hudlicka, E., Dastani, M., Gratch, J., Hin-
driks, K., Lorini, E., and Meyer, J.-J. C. (2013). Com-
putational modeling of emotion: Toward improving
the inter-and intradisciplinary exchange. IEEE Trans-
actions on Affective Computing, 4(3):246–266.
Ricci, A., Piunti, M., and Viroli, M. (2011). Environment
programming in multi-agent systems: An artifact-
based perspective. Autonomous Agents and Multi-
Agent Systems, 23(2):158–192.
Rocha, M., da Silva, H. H., Morales, A. S., Sarkadi, S., and
Panisson, A. R. (2023). Applying theory of mind to
multi-agent systems: A systematic review. In Brazil-
ian Conference on Intelligent Systems, pages 367–
381. Springer.
Distributed Theory of Mind in Multi-Agent Systems
459

Sarkadi, S¸., Panisson, A. R., Bordini, R. H., McBurney,
P., and Parsons, S. (2019). Towards an approach
for modelling uncertain theory of mind in multi-agent
systems. In Agreement Technologies: 6th Interna-
tional Conference, AT 2018, Bergen, Norway, Decem-
ber 6-7, 2018, Revised Selected Papers 6, pages 3–17.
Springer.
Sarkadi, S¸., Rutherford, A., McBurney, P., Parsons, S., and
Rahwan, I. (2021). The evolution of deception. Royal
Society open science, 8(9):201032.
Sarkadi, S¸ ., Tettamanzi, A.G.B. and Gandon, F. (2022).
Interoperable AI: Evolutionary Race Toward Sustain-
able Knowledge Sharing. IEEE Internet Computing,
26(6):25-32.
Sarkadi, S¸. (2023). An Arms Race in Theory-of-Mind: De-
ception Drives the Emergence of Higher-level Theory-
of-Mind in Agent Societies. In Proc. of 2023 IEEE In-
ternational Conference on Autonomic Computing and
Self-Organizing Systems (ACSOS), pages 1–10.
Sharma, N. and Gedeon, T. (2012). Objective mea-
sures, sensors and computational techniques for stress
recognition and classification: A survey. Computer
Methods and Programs in Biomedicine, 108(3):1287–
1301.
Shteynberg, G., Hirsh, J. B., Wolf, W., Bargh, J. A.,
Boothby, E. B., Colman, A. M., Echterhoff, G., and
Rossignac-Milon, M. (2023). Theory of collective
mind. Trends in Cognitive Sciences.
Walton, D. (2019). Using argumentation schemes to find
motives and intentions of a rational agent. Argument
& Computation, 10(3):233–275.
Walton, D., Reed, C., and Macagno, F. (2008). Argumenta-
tion schemes. Cambridge University Press.
Westby, S. and Riedl, C. (2023). Collective intelligence in
human-ai teams: A bayesian theory of mind approach.
In Proceedings of the AAAI Conference on Artificial
Intelligence, volume 37, pages 6119–6127.
EAA 2024 - Special Session on Emotions and Affective Agents
460
