
Fooling Neural Networks for Motion Forecasting via Adversarial Attacks
Edgar Medina
a
and Leyong Loh
b
QualityMinds GmbH, Germany
Keywords:
Adversarial Attacks, Human Motion Prediction, 3D Deep Learning, Motion Analyses.
Abstract:
Human motion prediction is still an open problem, which is extremely important for autonomous driving and
safety applications. Although there are great advances in this area, the widely studied topic of adversarial
attacks has not been applied to multi-regression models such as GCNs and MLP-based architectures in human
motion prediction. This work intends to reduce this gap using extensive quantitative and qualitative experi-
ments in state-of-the-art architectures similar to the initial stages of adversarial attacks in image classification.
The results suggest that models are susceptible to attacks even on low levels of perturbation. We also show
experiments with 3D transformations that affect the model performance, in particular, we show that most
models are sensitive to simple rotations and translations which do not alter joint distances. We conclude that
similar to earlier CNN models, motion forecasting tasks are susceptible to small perturbations and simple 3D
transformations.
1 INTRODUCTION
Neural networks have demonstrated remarkable capa-
bilities in achieving excellent performance in various
3D tasks, ranging from computer vision to robotics.
Their capacity to process and analyze volumetric data,
point clouds, or 3D meshes has been a driving force
behind their success. Additionally, recent advance-
ments in deep learning techniques, such as Con-
volutional Neural Networks (CNNs), Graph Convo-
lutional Networks (GCNs), and Transformers, have
substantially enhanced their ability to understand and
manipulate 3D data. One notable aspect is their abil-
ity to generalize across different scales, orientations,
and viewpoints has contributed to their robustness in
handling diverse 3D tasks. This robustness is par-
ticularly valuable in scenarios where data may ex-
hibit variations or perturbations, making neural net-
works a valuable tool for applications such as 3D ob-
ject recognition, pose estimation, point cloud analy-
sis, and others. In this work, we combine two dif-
ferent streams of artificial intelligence. On one side,
deep neural networks have been applied to human
motion prediction in different applications such as
autonomous driving and bioinformatics (Lyu et al.,
2022), (Wu et al., 2022). As mentioned in several pa-
pers, the surprising results of neural network architec-
a
https://orcid.org/0009-0001-4814-800X
b
https://orcid.org/0009-0007-7337-3683
tures applied to motion prediction on 3D data struc-
ture surpassed classical approaches (Lyu et al., 2022).
Most of these methodologies are RNN-based family,
GAN-based, mixed multi-linear nets, and GCNs. We
focus mainly on the last two approaches limited to
3D pose forecasting on the Human 3.6M (Ionescu
et al., 2014) dataset, but could be easily extended
to AMASS (Mahmood et al., 2019) and 3DPW (von
Marcard et al., 2018). On the other hand, research
in adversarial attacks has shown that neural networks
are not robust enough for production due to how eas-
ily they are fooled with small perturbations and trans-
formations (Goodfellow et al., 2014), (Xiang et al.,
2019), (Dong et al., 2017). Although adversarial at-
tacks have demonstrated success in fooling GCNs in
recent years (Chen et al., 2021; Liu et al., 2019; Car-
lini and Wagner, 2016; Entezari et al., 2020a; Tanaka
et al., 2021; Diao et al., 2021), these works focus on
classification tasks, which are the predominant appli-
cations in machine learning. However, given the na-
ture of our problem, many of these attack methods
are not directly applicable to multi-output regression
tasks. The investigation of adversarial attacks in hu-
man motion prediction is important. One example is
in safety-critical autonomous driving systems, adver-
sarial attacks can cause sensor failure in the pedestrian
motion prediction module of the autonomous vehicle,
consequently resulting in severe accidents. This pa-
per, to the best of our knowledge, presents the first
232
Medina, E. and Loh, L.
Fooling Neural Networks for Motion Forecasting via Adversarial Attacks.
DOI: 10.5220/0012562800003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 4: VISAPP, pages
232-242
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

effort of applying adversarial attacks in human mo-
tion prediction and intends to bridge this existing gap
in the literature by conducting extensive experimenta-
tion on different state-of-the-art (SOTA) models.
It is important to highlight a limitation we en-
countered during the progression of our work is the
absence of pre-trained models for several databases.
Since the process of retraining these models using our
own training codes may introduce a noteworthy de-
gree of variability in our experiments, our work in-
volves exclusively working with available pre-trained
models and when corresponding source codes are ac-
cessible to train by ourselves. More concretely, the
experiments involve applying gradient-based attacks
and 3D spatial transformations to neural networks for
multi-output regression tasks in human motion pre-
diction. These experiments exclusively use white-box
attacks because many methodologies adapted directly
to multi-output regression do not yield effective re-
sults. In the preliminary stages of testing, white-box
attacks serve as the initial choice due to their straight-
forward implementation. Conversely, black-box at-
tacks introduce added intricacies when setting up ex-
periments. Also, white-box attacks exhibit elevated
success rates and facilitate the development of more
refined and optimized attack tactics. White-box at-
tacks demonstrate heightened success rates and en-
able the formulation of more precise and refined at-
tack strategies, primarily due to their access to crit-
ical elements such as gradients, loss functions, and
model architecture details. This stands in contrast
to black-box attacks, which initially are resource-
intensive strategies in order to obtain during the itera-
tive process an understanding of the model. This po-
tentially increases the complexity of designing effec-
tive optimization strategies and reduces the precision
if this is not set appropriately. Finally, within the lit-
erature, there is an absence of references to black-box
attacks employed specifically for multi-output regres-
sion tasks within graph models. We summarize our
contributions as follows:
• We perform extensive experiments on state-of-
the-art models and evaluate the performance im-
pact on the well-studied H3.6M dataset.
• We provide a methodology review for adversarial
attacks applied to human motion prediction.
2 RELATED WORKS
2.1 Adversarial Attacks
Two primary methodologies for adversarial attacks,
namely White-box and Black-box methods, have
been extensively studied in the literature. For the sake
of simplicity and as explained in the introduction sec-
tion, our experiments exclusively were set over white-
box attacks and we excluded black-box methods in
this analysis. In our literature review, we specifically
focus on graph data, which exhibits parallels with the
pose sequence data we employ. While we acknowl-
edge the considerable impact of white-box attacks
on performance, we also delve into the examination
of 3D spatial transformations as adversarial attacks.
These transformations will be subject to a detailed
comparative analysis in subsequent sections.
White-Box: One of the initial and enduring tech-
niques in image perturbation is the Fast Gradient
Signed Method (FGSM) (Goodfellow et al., 2014),
which relies on computing the gradient through a sin-
gle forward pass of the network. This method sub-
sequently determines the gradient direction through a
sign operation and scales it by an epsilon value be-
fore incorporating it into the current input. Further-
more, an iterative variant (I-FGSM) was introduced
to mitigate pronounced effects when a large epsilon is
used (Goodfellow et al., 2014). More recently, an it-
eration with a momentum factor (MI-FGSM) was in-
troduced into the iterative algorithm, enhancing con-
trol over the gradient and reducing the perceptual vi-
sual impact of the attack (Dong et al., 2017). Iter-
ative approaches have demonstrated their superiority
over one-step methods in extensive experimentation
as robust white-box algorithms, albeit at the expense
of diminished transferability and increased computa-
tional demands (Dong et al., 2019). Later, Carlini
and Wagner’s method (C&W) (Carlini and Wagner,
2016) stands out as an unconstrained optimization-
based technique known for its effectiveness, even
when dealing with defense mechanisms. By har-
nessing first-order gradients, this algorithm seeks to
minimize a balanced loss function that simultane-
ously minimizes the norm of the perturbation while
maximizing the distance from the original input to
evade detection. Another relevant method is Deep-
Fool (Moosavi-Dezfooli et al., 2015), which focuses
on identifying the smallest perturbation capable of
causing misclassification by a neural network. Deep-
Fool achieves this by linearizing a neural network and
employing an iterative strategy to navigate the hyper-
plane in a simplified binary classification problem.
The minimal perturbation required to alter the clas-
Fooling Neural Networks for Motion Forecasting via Adversarial Attacks
233

sifier’s decision corresponds to the orthogonal projec-
tion of the input onto the hyperplane. DeepFool esti-
mates the closest decision boundary for each class and
iteratively adjusts the input in the direction of these
boundaries (Abdollahpourrostam et al., 2023). Im-
portantly, DeepFool is applicable to both binary and
multi-class classification tasks.
While there is a wealth of research related to
adversarial attacks in regression tasks (Gupta et al.,
2021), (Nguyen and Raff, 2018), this area remains
relatively unexplored, especially concerning multi-
regression tasks or specialized domains such as 3D
pose forecasting. Despite the significant progress
in adversarial attacks, the majority of methods have
mainly been applied to classification tasks. Therefore,
we introduce a mathematical framework for regres-
sion tasks to address this gap in research.
Adversarial Attacks on Graph Data: The out-
put of pose estimation can be regarded as graph
data, contingent on its structure and representation.
Poses contain 2D or 3D positions, also called key-
points or joints, of the human body connected by a
skeleton. Numerous prior studies within this domain
have extensively explored gradients and their appli-
cation in classification tasks (Sun et al., 2018; Zhang
et al., 2020; Fang et al., 2018; Zhu et al., 2019; Liu
et al., 2019; Carlini and Wagner, 2016; Entezari et al.,
2020a; Tanaka et al., 2021; Diao et al., 2021; Z
¨
ugner
et al., 2020). In our work, we take these studies as in-
spiration to implement our approach in multi-output
regression. In the next section, we provide more de-
tails about working with multiple real-valued outputs
given that the target is not a binary output the methods
must be adapted in this work. Furthermore, defense
strategies previously studied in (Chen et al., 2021)
and (Entezari et al., 2020b) showed that the attack ef-
fects can be reduced, however, these approaches are
beyond the scope of this work.
3D Point Cloud Operations: Taking inspiration
from prior research on adversarial attacks in point
clouds (Dong et al., 2017), we explore geometric
transformations applied to 3D data points. Our ob-
jective is to manipulate these data points while pre-
serving their distance distributions (Sun et al., 2021;
Huang et al., 2022; Hamdi et al., 2019; Dong et al.,
2017). Notably, many of these previous works em-
ploy metrics such as Hausdorff distance and distribu-
tion metrics rather than MPJPE to quantify discrepan-
cies between the adversarial input and the original in-
put. Our experiments revolve around spatio-temporal
affine transformations, including rotation, translation,
and scaling, as a means to modify the pose sequences.
2.2 3D Pose Forecasting
In this section, we investigate various architectural
paradigms, including GCNs, RNN-based models, and
MLP-based models (Lyu et al., 2022), that have been
employed for human motion prediction. During the
preprocessing stage, some models adopt Discrete Co-
sine Transforms (DCT) to transform the 3D input data
into the frequency domain. This approach draws in-
spiration from prior work in graph processing, as dis-
cussed in (Sun et al., 2018). There are branches re-
lated to how the 3D input data is used: pre-processed
and original.
Using a pre-processed input approach in the con-
text of 3D pose prediction, DCT has been employed
by (Guo et al., 2022), (Ma et al., 2022), (Mao et al.,
2020), and (Mao et al., 2021) to encode the input se-
quence. This encoding method is designed to capture
the periodic body movements inherent in human mo-
tion. These studies showed substantial improvements
in model predictions, surpassing the performance of
previous RNN-based approaches. However, this op-
eration is not only computationally expensive but also
needs the use of Inverse DCT (IDCT) to revert the
data back to the Euclidean space. Alternatively, other
preprocessing approaches propose the replacement of
input data or the aggregation of instantaneous dis-
placements and displacement norm vectors (Bouaz-
izi et al., 2022; Guo et al., 2022). These methodolo-
gies have shown a notable reduction in error metrics.
However, the pioneering network that, as far as our
knowledge, directly incorporates the original 3D data
into the model is called Space-Time-Separable Graph
Convolutional Network (STS-GCN) (Sofianos et al.,
2021).
The current SOTA models in the field encompass
MotionMixer (Bouazizi et al., 2022), siMLPe (Guo
et al., 2022), STS-GCN (Sofianos et al., 2021), PG-
BIG (Ma et al., 2022), HRI (Mao et al., 2020), and
MMA (Mao et al., 2021). MotionMixer and siMLPe
are both MLP-based models that borrow the idea of
Mixer architecture (Tolstikhin et al., 2021) and ap-
ply it to the domain of human pose forecasting. STS-
GCN and PGBIG are founded on GCNs. STS-GCN
utilizes two successive GCNs to sequentially encode
temporal and spatial pose data, while PGBIG intro-
duces a multi-stage prediction framework with an it-
erative refining of the initial future pose estimate for
improved prediction accuracy. HRI and MMA are
GCN-based models augmented with attention mod-
ules. HRI introduces a motion attention mechanism
based on DCT coefficients, which operate on sub-
sequences of the input data. MMA takes a distinctive
approach by employing an ensemble of HRI models
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
234
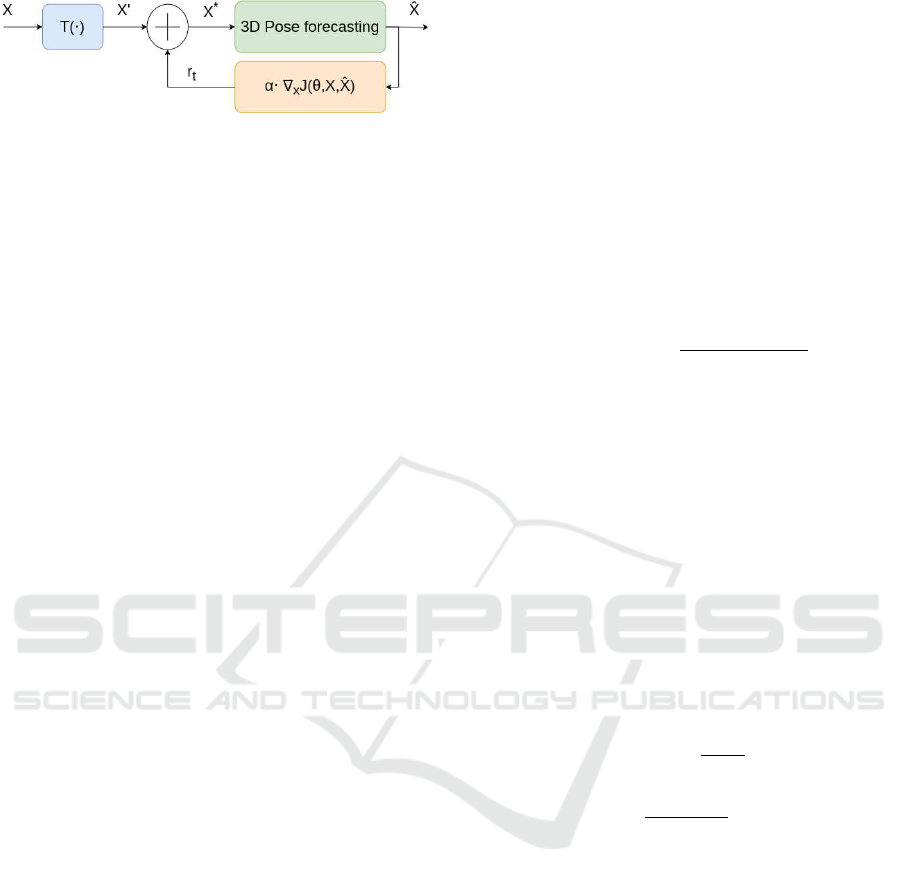
Figure 1: General diagram block for our experiments.
at three different levels: full-body, body parts, and in-
dividual joints, to achieve enhanced prediction accu-
racy. In contrast to other SOTA models, MotionMixer
adopts pose displacements as its input representation,
whereas PGBIG, siMLPe, HRI, and MMA utilize
DCT encoding for the input pose data. Tab. 1 and Tab.
2 present the action-wise and average MPJPE results
for the SOTA models on the Human3.6M dataset.
3 METHODOLOGY
3.1 Mathematical Notation
Let X be the input pose sequence and
ˆ
X the out-
put pose sequence. Every pose sequence belongs to
R
T ×J×D
where T J, and D are the temporal, joint
domains and the 3D Euclidean positions respectively.
Furthermore, we denote X
0
and X
∗
as the transformed
and the adversarial examples for an input pose. This
formulation process is visually depicted in Fig. 1. It
is important to observe that an identity transforma-
tion means that the transformed variable X
0
would be
identical to the original variable X.
3.2 Gradient-Based Methods
We first detail a commonly used non-targeted attack
called FGSM algorithm. FGSM finds an adversarial
example X
∗
that maximizes the loss function L(θ,x,y)
composed by L
∞
norm of the difference which is lim-
ited to a small ε. This is expressed in Eq. 1.
X
∗
= X +ε·sign(∇
x
L(θ,x, y)), kX
∗
−Xk
∞
≤ ε (1)
The iterative extension of FGSM, known as
IFGSM, applies the fast gradient method for multi-
ple iterations, introducing incremental changes con-
trolled by a scaling factor denoted as α. Conse-
quently, the adversarial example X
∗
is updated itera-
tively for a total of t times as described in Eq. 2, where
X
t
represents the adversarial example at the t-th iter-
ation. It is essential to emphasize that, as outlined in
(Dong et al., 2017), X
∗
must satisfy the boundary con-
dition imposed by ε to ensure minimal perturbation,
as denoted by kX
∗
−Xk ≤ ε within the algorithm. The
choice of norm for this constraint typically includes
the L
0
, L
2
, and L∞ norms. An alternative represen-
tation for the perturbation factor α can be derived by
setting α = ε/T , where T is the total number of itera-
tions.
X
∗
0
= X, X
∗
t+1
= X
∗
t
+ α · sign(∇
x
∗
t
L(θ,x, y)) (2)
A more sophisticated variant of IFGSM has been
proposed to improve the transferability of adversarial
examples by incorporating momentum within the iter-
ative process. The update procedure is shown in Eqs.
3 and 4, where g
t
gathers the gradient information in
the t-th iteration, subject to a decay factor µ.
g
t+1
= µ · g
t
+
∇
x
∗
t
L(θ,x, y)
k∇
x
∗
t
L(θ,x, y)k
1
(3)
X
∗
t+1
= X
∗
t
+ α · sign(g
t+1
) (4)
The DeepFool approach merges a linearization
strategy with the vector projection of a given sample.
This projection corresponds to the minimum distance
required to cross the hyperplane in the context of bi-
nary classification. Subsequently, this approach has
been extended to multi-class classification scenarios.
The noise introduced is described as a vector projec-
tion originating from a point x
0
, oriented in the di-
rection of the hyperplane’s normal vector W , with the
distance serving as its magnitude. This mathemati-
cal representation is expressed in Eq. 5. However,
with the iterative application of noise, its representa-
tion evolves as shown in Eq. 6.
r
∗
(x
0
) = −
f (x
0
)
kwk
2
2
w (5)
r
i
← −
f (x
i
)
k∇ f (x
i
)k
2
2
∇ f (x
i
) (6)
Our methodology comprises two primary steps.
First, we establish a neural network linearization ap-
proach, similar to previous methodologies explored in
works such as (Moosavi-Dezfooli et al., 2015; Gupta
et al., 2021; Nguyen and Raff, 2018). Second, we
introduce a noise vector to the point x
0
, strategically
positioned to be in very close proximity to the hy-
perplane Π : W
T
X. This is illustrated in Fig. 2.
This noise vector must have a horizontal orientation
to ensure that an input changes, transitioning from
X ∈ R
T
2
xJx3
to
ˆ
X ∈ R
T
2
xJx3
, does not induce any alter-
ations in the output y ∈ R
T
1
xJx3
. This condition can be
mathematically expressed as a straightforward regres-
sion problem, namely y = f
W
(x
0
), where typically T
1
and T
2
differ. Also, it becomes evident from the figure
that the error denoted as E is directly proportional to
the magnitude of the noise vector kr
0
k. For instance,
Fooling Neural Networks for Motion Forecasting via Adversarial Attacks
235
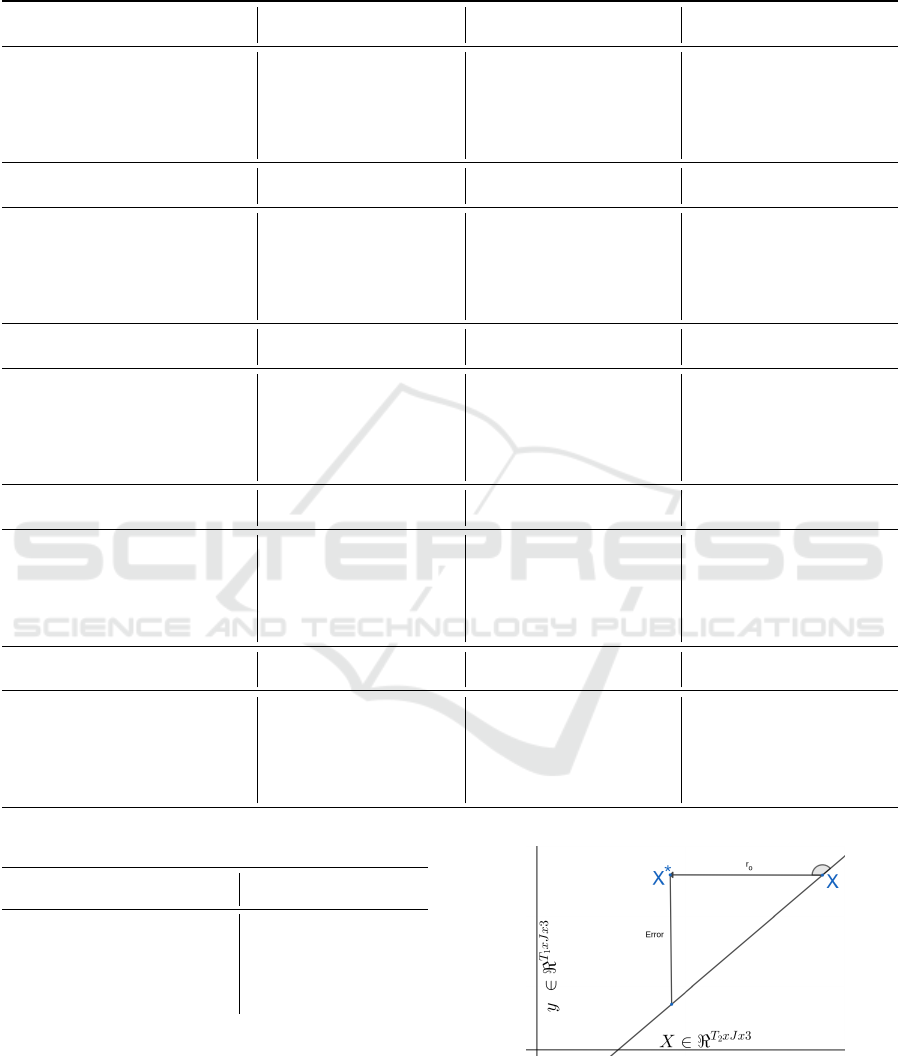
Table 1: Action-wise performance comparison of MPJPE for motion prediction on Human3.6M. We employ our evaluation
pipeline only for the 1000ms models. A notable discrepancy exists between our evaluation results and those reported in the
original papers. This variation is mainly due to the original papers using different strategies and frame evaluations.
Walking Eating Smoking
Time (ms) 80 160 320 400 560 1000 80 160 320 400 560 1000 80 160 320 400 560 1000
STS-GCN (Sofianos et al., 2021) 18.0 32.9 46.7 53.4 58.0 70.2 12.1 23.3 36.8 44.3 57.4 82.6 13.0 16.4 37.2 44.6 55.5 76.1
PGBIG (Ma et al., 2022) 14.5 34.5 66.7 79.0 96.7 111.2 7.93 19.2 38.9 48.0 63.8 88.7 8.55 20.0 39.7 48.1 62.0 85.5
MotionMixer (Bouazizi et al., 2022) 14.4 27.0 46.2 52.7 58.7 66.1 8.5 17.3 33.5 41.3 54.4 79.9 9.0 17.9 34.3 41.7 53.2 74.3
siMLPe (Guo et al., 2022) 12.0 20.5 34.8 40.2 48.7 57.3 9.9 16.2 30.4 37.6 53.4 79.1 10.5 17.0 31.5 38.0 51.4 73.9
HRI (Mao et al., 2020) 10.0 19.5 34.2 39.8 47.4 58.1 6.4 14.0 28.7 36.2 50.0 75.6 7.0 14.9 29.9 36.4 47.6 69.5
MMA (Mao et al., 2021) 9.9 19.3 33.8 39.1 46.2 57.2 6.2 13.7 28.1 35.3 48.7 73.8 6.8 14.5 29.0 35.5 46.5 68.8
Discussion Directions Greeting
Time (ms) 80 160 320 400 560 1000 80 160 320 400 560 1000 80 160 320 400 560 1000
STS-GCN (Sofianos et al., 2021) 17.1 33.2 58.6 71.3 91.1 118.9 13.9 29.3 52.8 64.0 79.9 109.6 20.8 40.7 72.2 85.9 106.3 136.1
PGBIG (Ma et al., 2022)
12.1 28.7 58.5 71.6 93.6 123.9 9.1 23.0 49.8 61.4 77.7 108.9 16.2 38.0 74.6 88.6 111.1 143.8
MotionMixer (Bouazizi et al., 2022) 12.7 27.1 56.8 70.2 91.7 123.8 9.0 20.9 48.1 60.2 76.9 110.1 16.6 35.5 72.7 87.5 110.8 145.6
siMLPe (Guo et al., 2022) 12.5 24.6 52.2 65.2 87.8 118.8 11.2 20.4 45.7 57.2 76.3 110.1 15.1 30.2 63.5 77.8 101.3 139.3
HRI (Mao et al., 2020) 10.2 23.4 52.1 65.4 86.6 119.8 7.4 18.4 44.5 56.5 73.9 106.5 13.7 30.1 63.8 78.1 101.9 138.8
MMA (Mao et al., 2021) 9.9 22.9 51.0 64.0 85.3 117.8 7.2 18.0 43.3 55.0 72.3 105.8 13.6 30.0 63.2 77.5 101.0 137.9
Phoning Posing Purchases
Time (ms) 80 160 320 400 560 1000 80 160 320 400 560 1000 80 160 320 400 560 1000
STS-GCN (Sofianos et al., 2021) 14.5 27.3 45.7 55.4 73.1 108.3 19.0 38.9 71.7 89.2 119.7 178.4 20.9 41.4 71.8 86.0 106.8 141.0
PGBIG (Ma et al., 2022) 10.2 23.5 48.5 59.3 77.6 114.4 12.3 30.6 66.2 82.1 111.0 173.8 14.8 34.2 65.5 78.4 99.3 136.7
MotionMixer (Bouazizi et al., 2022) 10.5 21.2 43.6 54.2 72.6 110.1 12.6 28.3 65.0 82.5 113.4 181.3 15.3 33.5 67.8 81.7 102.6 143.7
siMLPe (Guo et al., 2022) 11.8 19.9 39.8 49.4 68.2 103.7 13.4 25.8 58.8 74.8 105.9 170.0 15.6 29.9 60.0 73.5 96.5 135.4
HRI (Mao et al., 2020) 8.6 18.3 39.0 49.2 67.4 105.0 10.2 24.2 58.5 75.8 107.6 178.2 13.0 29.2 60.4 73.9 95.6 134.2
MMA (Mao et al., 2021) 8.5 18.0 38.3 48.4 66.6 104.1 9.8 23.7 58.0 75.1 105.8 171.5 12.8 28.7 59.5 72.8 94.6 133.6
Sitting Sitting Down Taking Photo
Time (ms) 80 160 320 400 560 1000 80 160 320 400 560 1000 80 160 320 400 560 1000
STS-GCN (Sofianos et al., 2021) 16.0 30.1 51.9 63.9 84.7 121.4 23.9 42.9 68.9 81.5 105.2 148.4 16.2 31.3 52.1 63.4 84.2 126.3
PGBIG (Ma et al., 2022) 10.0 22.2 45.5 56.3 76.2 114.4 15.8 33.5 61.8 74.1 98.5 143.3 9.3 21.3 44.6 55.5 75.7 116.1
MotionMixer (Bouazizi et al., 2022) 10.8 22.4 46.5 57.8 78.0 116.4 17.1 34.6 64.3 77.7 103.3 149.6 9.6 20.3 43.5 54.5 75.3 118.3
siMLPe (Guo et al., 2022) 13.2 22.2 45.5 56.8 79.3 118.2 18.3 32.4 59.8 72.3 99.2 144.8 12.5 20.5 41.6 52.1 73.8 114.1
HRI (Mao et al., 2020) 9.3 20.1 44.3 56.0 76.4 115.9 14.9 30.7 59.1 72.0 97.0 143.6 8.3 18.4 40.7 51.5 72.1 115.9
MMA (Mao et al., 2021) 9.1 19.7 43.7 55.5 75.8 114.6 14.7 30.4 58.5 71.4 96.2 142.0 8.2 18.1 40.2 51.1 71.8 114.6
Waiting Walking Dog Walking Together
Time (ms) 80 160 320 400 560 1000 80 160 320 400 560 1000 80 160 320 400 560 1000
STS-GCN (Sofianos et al., 2021) 15.9 31.5 52.3 63.4 80.8 113.6 29.2 53.3 84.2 96.1 115.4 151.5 15.5 28.2 42.3 49.9 58.9 72.5
PGBIG (Ma et al., 2022) 10.6 25.2 53.1 65.2 83.8 113.1 22.5 47.2 81.1 93.6 113.8 151.4 11.5 28.0 55.2 66.7 83.0 99.0
MotionMixer (Bouazizi et al., 2022) 10.8 22.8 49.1 61.0 80.3 113.4 24.2 47.2 81.0 93.0 111.6 153.8 11.6 23.1 43.5 51.7 61.2 69.9
siMLPe (Guo et al., 2022) 11.5 20.6 43.7 54.2 74.0 106.1 22.3 40.7 72.6 85.0 108.7 145.0 11.8 19.9 35.7 42.1 53.7 64.6
HRI (Mao et al., 2020) 8.7 19.2 43.4 54.9 74.5 108.2 20.1 40.3 73.3 86.3 108.2 146.8 8.9 18.4 35.1 41.9 52.7 64.9
MMA (Mao et al., 2021) 8.4 18.8 42.5 53.8 72.6 104.8 19.6 39.5 71.8 84.3 105.1 142.1 8.5 17.9 34.4 41.2 51.3 63.3
Table 2: Average MPJPE for H3.6M dataset.
Average
Time (ms) 80 160 320 400 560 1000
STS-GCN (Sofianos et al., 2021) 17.7 33.9 56.3 67.5 85.1 117.0
PGBIG (Ma et al., 2022) 12.4 28.6 56.7 68.5 88.2 121.6
MotionMixer (Bouazizi et al., 2022) 12.8 26.6 53.1 64.5 82.9 117.1
siMLPe (Guo et al., 2022) 13.4 24.0 47.7 58.4 78.6 112.0
HRI (Mao et al., 2020) 10.4 22.6 47.1 58.3 77.3 112.1
MMA (Mao et al., 2021) 10.2 22.2 46.4 57.3 76.0 110.1
when considering an angle of 45
◦
within a right tri-
angle, the error magnitude aligns with the magni-
tude of the noise vector. This observation means that
networks with heightened susceptibility, particularly
from a numerical instability perspective, are more
likely to exhibit larger errors.
Figure 2: Visual interpretation of an algorithm for regres-
sion tasks.
3.3 Spatio-Temporal Transformations
In contrast to adding noise into the pose sequences,
we propose an alternative approach involving the ap-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
236
plication of 3D transformations, specifically affine
transformations, to evaluate the models. The gen-
eral form of an affine transformation in homogeneous
coordinates is mathematically represented in Eq. 7,
where A represents the affine matrix, and t is the
translation vector. The matrix A implicitly contains
both the rotation matrix and the scaling factor through
a matrix multiplication operation between these two
matrices. The output of the transformation, denoted
as X
0
, is obtained after operating the transformation
T (·). Hence, the final adversarial example is derived
through the addition of noise r
t
, as illustrated in Fig.
1. This process is formally expressed in Eqs. 8 and
9. It is worth noting that the transformation operation
T (·) may behave as an identity matrix in certain cases.
H =
A t
0
T
1
,where detA 6= 0 (7)
X
0
= T (X) (8)
X
∗
= X
0
+ r
t
(9)
4 EXPERIMENTATION
4.1 Datasets
We conducted experiments on the Human 3.6M
(Ionescu et al., 2014) dataset. This dataset consists of
a diverse set of 15 distinct actions performed by 7 dif-
ferent actors. To facilitate consistent processing, we
downsampled the frame rate to 25Hz and employed a
22-joint configuration same as in (Mao et al., 2020)
and (Fu et al., 2022). It means subjects 1, 6, 7, 8, and
9 were set for training, subject 11 for validation, and
subject 5 for testing.
4.2 Results
We have opted to select SOTA models for our exper-
iments. To ensure a fair comparison, we have uni-
formly implemented all these models within our eval-
uation pipeline and have evaluated them using a con-
sistent standard metric. These experiments serve to
analyze the impact of adversarial attacks and spatial
transformations on the performance of these models,
thereby providing valuable insights into the strengths
and limitations of various architectures. We also at-
tempted to conduct experiments with AMASS and
3DPW datasets. However, we encountered a chal-
lenge as there were no training codes or pre-trained
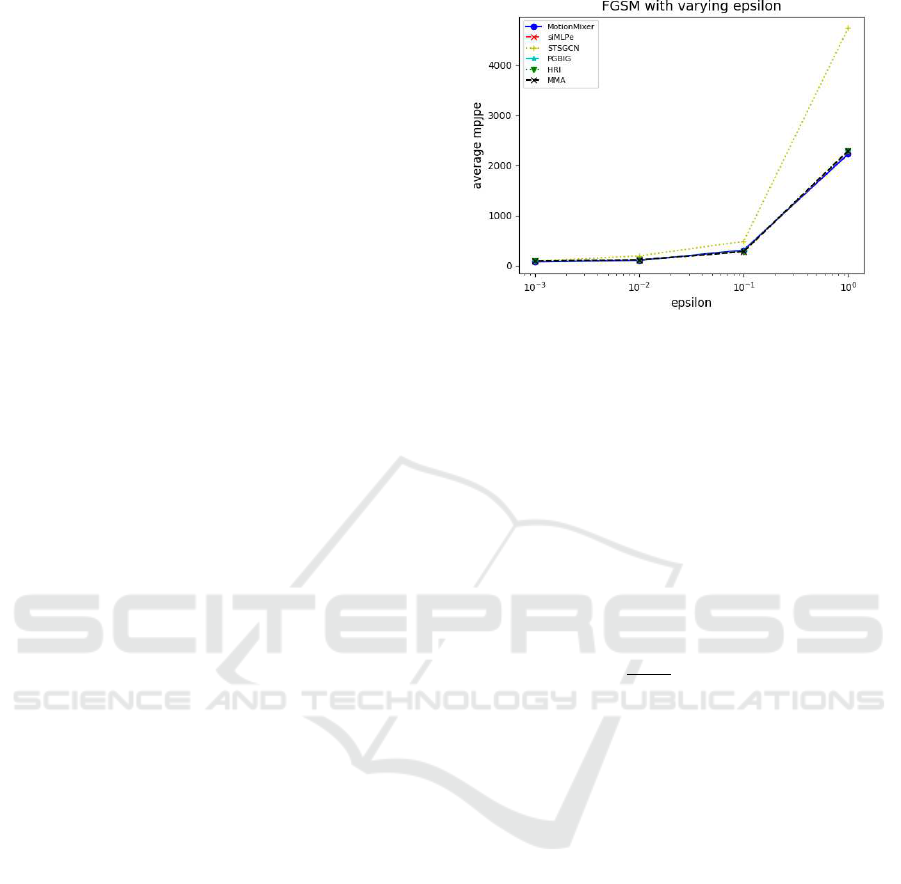
Figure 3: Result of FGSM with increasing epsilon on aver-
age MPJPE.
models available for all the models. Also, conduct-
ing a fair and meaningful comparison across all mod-
els under these conditions was rendered infeasible.
Therefore, only STS-GCN, MotionMixer and siMLPe
are evaluated on AMASS and 3DPW.
Metric. In our evaluations, we employ the Mean
Per Joint Position Error (MPJPE) metric, which is a
widely accepted evaluation measure commonly used
in previous works (Lyu et al., 2022; Dang et al., 2021;
Liu et al., 2021) to compare two pose sequences. The
MPJPE metric is defined in Eq. (10).
L
MPJPE
=
1
J × T
T
∑
t=1
J
∑
j=1
k ˆx
j,t
− x
j,t
k
2
(10)
Quantitative Results. We conducted adversar-
ial attacks using the IFGSM, MIFGSM, and Deep-
Fool techniques on the SOTA models. Tabs. 3 and
4 present the outcomes of these adversarial attacks
when applied to the models on the Human 3.6M
dataset. The variable ∆s represents the Euclidean
distance between the adversarial examples and their
corresponding real examples, and w/o represents the
original average MPJPE without any attack.
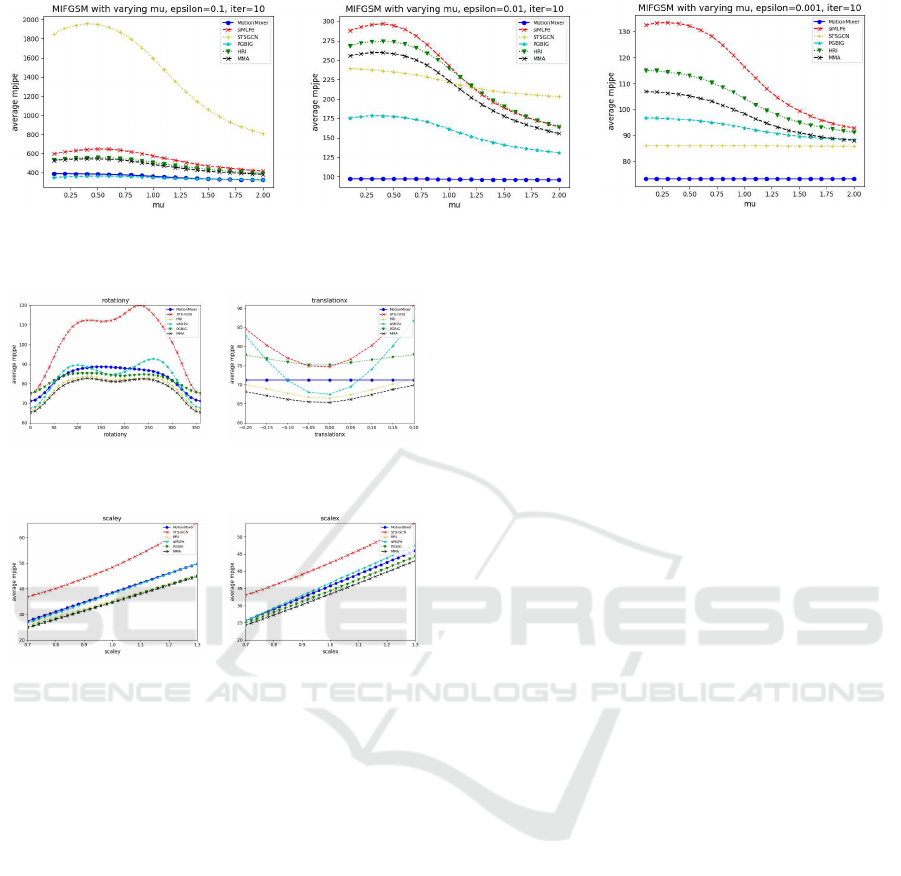
Fig. 3 shows the effect of epsilon on average
MPJPE, similar effect occurred in our experiment for
IFGSM and MIFGSM. We therefore fixed the ε value
for our experiments in Tabs. 3 and 4 at 0.001 and 0.01.
Another reason for that was because of the increase
of ∆s as average MPJPE increases. The goal of the
adversarial attacks is to keep ∆s as small as possible
but to maximize average MPJPE. When ∆s becomes
too large, it becomes infeasible to occur in reality. In
terms of number of iterations it was specified as 10
for IFGSM, MIFGSM, and DeepFool. The parameter
µ in MIFGSM was set to 0.4. DeepFool has only one
parameter, the number of iterations.
We highlight that previous attempts at adversarial
attacks were mostly applied to images, which typi-
Fooling Neural Networks for Motion Forecasting via Adversarial Attacks
237
Table 3: Comparison of adversarial attacks on average MPJPE for H3.6M. The arrows denote superior results. (ε = 0.001).
Model IFGSM (↑) ∆s (↓) MIFGSM (↑) ∆s (↓) DeepFool (↑) ∆s (↓) w/o
STS-GCN 86.1 (+16%) 1.3 86.1 (+16%) 1.3 89.5 (+20%) 2.6 74.7
PGBIG 96.9 (+28%) 0.3 96.2 (+27%) 0.3 86.7 (+15%) 0.9 75.2
MotionMixer 72.3 (+1%) 0.02 72.3 (+1%) 0.02 101.9 (+43%) 2.6 71.2
siMLPe 131.3 (+94%) 1.1 133.1 (+97%) 1.2 86.9 (+29%) 0.9 67.5
HRI 115.2 (+73%) 1.2 113.8 (+71%) 1.2 82.1 (+24%) 0.7 66.4
MMA 107.1 (+64%) 1.2 105.9 (+62%) 1.2 79.7 (+22%) 0.7 65.3
Table 4: Comparison of adversarial attacks on average MPJPE for H3.6M. The arrows denote superior results. (ε = 0.01).
Model IFGSM (↑) ∆s (↓) MIFGSM (↑) ∆s (↓) DeepFool (↑) ∆s (↓) w/o
STS-GCN 239.5 (+220%) 13.1 236.2 (+216%) 13.5 89.5 (+20%) 2.6 74.7
PGBIG 173.7 (+131%) 2.3 178.2 (+137%) 2.6 86.7 (+15%) 0.9 75.2
MotionMixer 84.1 (+18%) 0.2 83.9 (+17%) 0.2 101.9 (+43%) 2.6 71.2
siMLPe 281.1 (+316%) 10.7 296.6 (+339%) 11.5 86.9 (+29%) 0.9 67.5
HRI 264.1 (+297%) 11.5 274.0 (+312%) 12.1 82.1 (+24%) 0.7 66.4
MMA 250.8 (+284%) 11.7 259.7 (+297%) 12.2 79.7 (+22%) 0.7 65.3
Table 5: Comparison of adversarial attacks on the average MPJPE for AMASS. The arrows denote superior results. (
∗
) model
was trained by us. (ε = 0.01).
Model IFGSM (↑) ∆s (↓) MIFGSM (↑) ∆s (↓) DeepFool (↑) ∆s (↓) w/o
STS-GCN 194.8 (+78%) 12.2 194.8 (+78%) 12.2 119.6 (+9%) 4.3 109.6
MotionMixer 89.1 (+1%) 0.17 89.1 (+1%) 0.17 89.0 (+1%) 2.6 88.5
siMLPe
∗
189.8 (+406%) 12.5 190.2 (+407%) 12.5 66.9 (+78%) 1.3 37.5
Table 6: Comparison of adversarial attacks on average MPJPE for 3DPW. The arrows denote superior results. (
∗
) model was
trained by us. (ε = 0.01).
Model IFGSM (↑) ∆s (↓) MIFGSM (↑) ∆s (↓) DeepFool (↑) ∆s (↓) w/o
STS-GCN 190.4 (+79%) 13.7 190.2 (+79%) 13.7 115.5 (+9%) 4.3 106.1
MotionMixer 69.5 (+1%) 0.19 69.5 (+1%) 0.19 69.0 (+0%) 2.5 69.0
siMLPe
∗
189.5 (+358%) 12.4 190.0 (+360%) 12.3 63.7 (+54%) 1.3 41.3
cally have pixel values normalized to the range be-
tween 0 and 1. However, in our case, we are apply-
ing adversarial attacks to 3D human pose sequences,
which consist of real numbers larger than 1. There-
fore, to determine the actual ε value for each sample,
we scaled the predefined epsilon value using the ex-
pression from Eqs. 1, 2, and 4, while considering the
vertical axis, as indicated by the term |X
max
− X
min
|.
This approach ensures that the added perturbation re-
mains within a reasonable and meaningful range.
As shown in Tabs. 3 and 4, MotionMixer stands
out as the most robust model in comparison to the oth-
ers. This heightened robustness can be attributed to
the utilization of pose displacements as input data,
while other models rely on pose positions or pre-
processed versions of these. Consequently, by incor-
porating changes in pose positions between consec-
utive frames as input, we increase the robustness of
the model. In our ablation study, we explore the im-
pact of the parameter µ in the MIFGSM method on
the MPJPE. Fig. 4 reveals that the optimal µ value
falls within the range of 0.25 to 0.5, which consis-
tently yields the largest average MPJPE error across
all models. We also noted that the input sequences
vary in length among our models, and this varia-
tion can also impact the gradient magnitude, adding
an additional layer of complexity to our analysis.
Also, to demonstrate the performance and generaliza-
tion capabilities of these attacks. We also apply the
same IFGSM, MIFGSM, and DeepFool algorithms to
available SOTA models for the AMASS and 3DPW
datasets, this is presented in Tabs. 5 and 6 respec-
tively. As we can observe, MotionMixer reflects the
best robustness against attacks. We indicate with (
∗
)
to point to the models that were trained by us using
the author’s codes.
In addition to conventional adversarial attacks, we
have introduced spatial perturbations to our models
and evaluated their performance based on the MPJPE.
As depicted in Fig. 5, STS-GCN exhibits sensitivity
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
238
(a) ε equal to 0.1 (b) ε equal to 0.01 (c) ε equal to 0.001
Figure 4: Result of MIFGSM on average MPJPE with µ ranging from 0.0 to 2.0 with granularity 0.1 using 10 iterations.
(a) Rotations between 0-360
degrees in the Y-axis
(b) Scale rate between 0.7
and 1.3 in the Y-axis
(c) Translation rate between
-0.2 and 0.2 in the X-axis
(d) Scale rate between 0.7
and 1.3 in the X-axis.
Figure 5: Transformation effects on the test set using the
average MPJPE over the 25 output frames.
to spatial perturbation, primarily due to its higher gra-
dient (rate of change concerning perturbation) com-
pared to other models. On the other hand, Motion-
Mixer, which utilizes pose displacements as input,
displays a robust behavior to rotation and translation
perturbations, as these alterations have minimal im-
pact on the performance following 3D transforma-
tions. For this reason, MotionMixer behaves as the
most robust architecture against translation perturba-
tion, as reflected by the nearly flat average MPJPE,
which remains unchanged for different translation
factors applied to the input. Finally, we conducted ex-
periments involving scale transformations to demon-
strate that the MPJPE performance does not exhibit
a linear increase for all models in a uniform manner.
Although we know that the MPJPE metric is influ-
enced by the scale factor, we observe that the model
predictions are also not accurately scaled. All the tests
presented in this context can be considered as out-of-
distribution data.
Qualitative Results. In order to show visually the
effect of the adversarial attacks on the models. In Fig.
6, we visualize the output of the SOTA models for a
“walking” motion in the following order: HRI, MMA,
MotionMixer, PGBIG, STSCGN, and siMLPe. We
show the effect of rotation over the vertical axis and
how this affects the model performance. More de-
tailed, Fig. 6a shows the original prediction while Fig.
6b shows the prediction for a rotated input. The plot
shows the samples with predictions of 80, 160, 320,
400, 560, 720, 880, and 1000 ms. Additionally, we
also present in Fig. 7 the output prediction of STS-
GCN before (first row) and after applying the IFGSM
algorithm for different epsilon values. We show the
output prediction at timestamps of 80, 160, 320, 400,
560, 720, 880, and 1000 ms. The average MPJPE for
this “walking” sample is originally 48.35 but after ap-
plying IFGSM, the values average MPJPE are 53.30,
109.08, and 592.89 for epsilon values at 0.001, 0.01,
and 0.1. We know that epsilon at 0.1 is large enough
to fool the network but have a cost on the ∆s in the
input domain. Visually we can observed a prediction
collapse for ε equal to 0.1 in Fig. 7. We also un-
derstand that in regression, numerical stability has a
large cost when these attack algorithms are applied.
But with a defined metric for the difference between
the input and adversarial samples ∆s, we could use
this controlled noise in the training stage.
5 DISCUSSION
Despite conducting an extensive array of experi-
ments employing SOTA models on well-established
datasets, we observed that the prediction error re-
mained nearly consistent across all frames. This phe-
nomenon can be attributed to the threshold imposed
by the FGSM algorithm family. However, Deepfool,
which utilizes the output predictions and processes
them with their gradients, allows for the generation
of a non-flat response when introducing adversarial
Fooling Neural Networks for Motion Forecasting via Adversarial Attacks
239
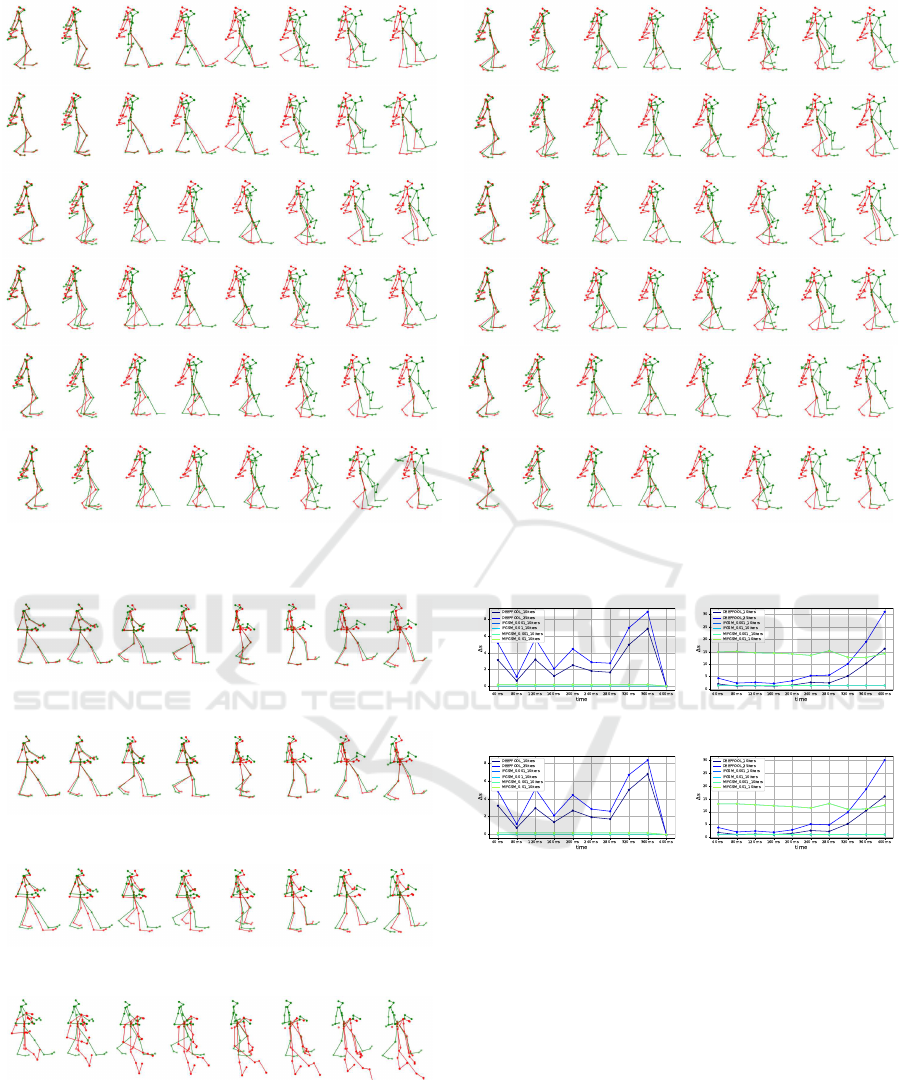
(a) Original input. (b) Rotation 240
◦
in the vertical axis.
Figure 6: Prediction for a walking pedestrian before and after rotating 240
◦
.
(a) original
(b) ε = 0.001
(c) ε = 0.01
(d) ε = 0.1
Figure 7: Prediction for a walking pedestrian after applying
an adversarial attack.
noise. To apply Deepfool effectively in our context
with pose sequences, certain adaptations were needed
due to disparities in input and output shapes. In con-
(a) MotionMixer on 3DPW (b) STSGCN on 3DPW
(c) MotionMixer on AMASS (d) STSGCN on AMASS
Figure 8: Adversarial attacks applied to STSGCN and Mo-
tionMixer models on the AMASS and 3DPW datasets.
trast to Deepfool, FSGM uses gradients that have the
same shape as the input sequence. Consequently, our
approach takes the average of the output gradients
in the time domain, which was subsequently prop-
agated as a single-frame error. This adaptation re-
sulted in a distinct gradient behavior. This is illus-
trated in Fig. 8 for AMASS and 3DPW datasets,
where the horizontal axis presents the frame index
and the vertical axis presents the difference between
the original and adversarial sequences, denoted as ∆s.
We use the mean Hausdorff distance metric for Mo-
tionMixer and the MPJPE metric for STS-GCN. This
choice was made to see more insightful visualiza-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
240

tions, particularly considering that MotionMixer em-
ploys displacement-based representations with values
that are typically very low. It can be observed that the
adversarial attacks algorithms learn to exert the most
variation in ∆s to the last frame, in order to fool the
models. Additionally, in the case of MotionMixer, the
last displacement is replaced with the positions of the
last frame for this evaluation, that’s why the ∆s drop
to zero for the last displacement frame.
6 CONCLUSIONS AND FUTURE
DIRECTION
We observed that models are easily fooled by adver-
sarial attacks as same as in the initial stages of CNNs
on image classification. Furthermore, we showed
that 3D spatial transformations also behave as no-
gradient-based attack methods and have strong ef-
fects on the model performance. As a future direc-
tion, we plan to use these methods as data augmenta-
tion for more realistic scenarios such as small short-
period rotations or spatio-temporal windowed noise.
We also plan to explore black-box methods since we
observed white-box attacks worked successfully and
also a white-box method using the gradients to guide
the 3D spatial transformations.
ACKNOWLEDGEMENTS
The research leading to these results is funded by the
German Federal Ministry for Economic Affairs and
Climate Action within the project “ATTENTION –
Artificial Intelligence for realtime injury prediction”.
The authors would like to thank the consortium for
the successful cooperation.
REFERENCES
Abdollahpourrostam, A., Abroshan, M., and Moosavi-
Dezfooli, S.-M. (2023). Revisiting DeepFool: gen-
eralization and improvement.
Bouazizi, A., Holzbock, A., Kressel, U., Dietmayer, K., and
Belagiannis, V. (2022). MotionMixer: MLP-based 3D
Human Body Pose Forecasting.
Carlini, N. and Wagner, D. (2016). Towards Evaluating the
Robustness of Neural Networks.
Chen, J., Lin, X., Xiong, H., Wu, Y., Zheng, H., and Xuan,
Q. (2021). Smoothing Adversarial Training for GNN.
IEEE Transactions on Computational Social Systems,
8(3):618–629.
Dang, L., Nie, Y., Long, C., Zhang, Q., and Li, G. (2021).
MSR-GCN: Multi-Scale Residual Graph Convolution
Networks for Human Motion Prediction.
Diao, Y., Shao, T., Yang, Y.-L., Zhou, K., and Wang, H.
(2021). BASAR:Black-box Attack on Skeletal Action
Recognition.
Dong, Y., Liao, F., Pang, T., Su, H., Zhu, J., Hu, X., and Li,
J. (2017). Boosting Adversarial Attacks with Momen-
tum.
Dong, Y., Pang, T., Su, H., and Zhu, J. (2019). Evad-
ing Defenses to Transferable Adversarial Examples by
Translation-Invariant Attacks.
Entezari, N., Al-Sayouri, S. A., Darvishzadeh, A., and Pa-
palexakis, E. E. (2020a). All You Need Is Low (Rank).
In Proceedings of the 13th International Conference
on Web Search and Data Mining, pages 169–177, New
York, NY, USA. ACM.
Entezari, N., Al-Sayouri, S. A., Darvishzadeh, A., and Pa-
palexakis, E. E. (2020b). All You Need Is Low (Rank).
In Proceedings of the 13th International Conference
on Web Search and Data Mining, pages 169–177, New
York, NY, USA. ACM.
Fang, M., Yang, G., Gong, N. Z., and Liu, J. (2018). Poison-
ing Attacks to Graph-Based Recommender Systems.
Fu, J., Yang, F., Liu, X., and Yin, J. (2022). Learning
Constrained Dynamic Correlations in Spatiotemporal
Graphs for Motion Prediction.
Goodfellow, I. J., Shlens, J., and Szegedy, C. (2014). Ex-
plaining and Harnessing Adversarial Examples.
Guo, W., Du, Y., Shen, X., Lepetit, V., Alameda-Pineda,
X., and Moreno-Noguer, F. (2022). Back to MLP: A
Simple Baseline for Human Motion Prediction.
Gupta, K., Pesquet-Popescu, B., Kaakai, F., Pesquet, J.-
C., and Malliaros, F. D. (2021). An Adversarial At-
tacker for Neural Networks in Regression Problems.
In IJCAI Workshop on Artificial Intelligence Safety
(AI Safety), Montreal/Virtual, Canada.
Hamdi, A., Rojas, S., Thabet, A., and Ghanem, B. (2019).
AdvPC: Transferable Adversarial Perturbations on 3D
Point Clouds.
Huang, Q., Dong, X., Chen, D., Zhou, H., Zhang, W., and
Yu, N. (2022). Shape-invariant 3D Adversarial Point
Clouds.
Ionescu, C., Papava, D., Olaru, V., and Sminchisescu, C.
(2014). Human3.6M: Large Scale Datasets and Pre-
dictive Methods for 3D Human Sensing in Natural En-
vironments. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 36(7):1325–1339.
Liu, J., Akhtar, N., and Mian, A. (2019). Adversarial Attack
on Skeleton-based Human Action Recognition.
Liu, X., Yin, J., Liu, J., Ding, P., Liu, J., and Liu, H.
(2021). TrajectoryCNN: A New Spatio-Temporal
Feature Learning Network for Human Motion Predic-
tion. IEEE Transactions on Circuits and Systems for
Video Technology, 31(6):2133–2146.
Lyu, K., Chen, H., Liu, Z., Zhang, B., and Wang, R. (2022).
3D Human Motion Prediction: A Survey.
Ma, T., Nie, Y., Long, C., Zhang, Q., and Li, G. (2022). Pro-
gressively Generating Better Initial Guesses Towards
Fooling Neural Networks for Motion Forecasting via Adversarial Attacks
241

Next Stages for High-Quality Human Motion Predic-
tion.
Mahmood, N., Ghorbani, N., Troje, N. F., Pons-Moll, G.,
and Black, M. (2019). AMASS: Archive of Motion
Capture As Surface Shapes. In 2019 IEEE/CVF In-
ternational Conference on Computer Vision (ICCV),
pages 5441–5450. IEEE.
Mao, W., Liu, M., and Salzmann, M. (2020). History Re-
peats Itself: Human Motion Prediction via Motion At-
tention.
Mao, W., Liu, M., Salzmann, M., and Li, H. (2021).
Multi-level Motion Attention for Human Motion Pre-
diction. International Journal of Computer Vision,
129(9):2513–2535.
Moosavi-Dezfooli, S.-M., Fawzi, A., and Frossard, P.
(2015). DeepFool: a simple and accurate method to
fool deep neural networks.
Nguyen, A. T. and Raff, E. (2018). Adversarial Attacks,
Regression, and Numerical Stability Regularization.
Sofianos, T., Sampieri, A., Franco, L., and Galasso, F.
(2021). Space-Time-Separable Graph Convolutional
Network for Pose Forecasting.
Sun, J., Cao, Y., Choy, C. B., Yu, Z., Anandkumar, A., Mao,
Z. M., and Xiao, C. (2021). Adversarially Robust 3D
Point Cloud Recognition Using Self-Supervisions. In
Ranzato, M., Beygelzimer, A., Dauphin, Y., Liang,
P. S., and Vaughan, J. W., editors, Advances in Neu-
ral Information Processing Systems, volume 34, pages
15498–15512. Curran Associates, Inc.
Sun, L., Dou, Y., Yang, C., Wang, J., Liu, Y., Yu, P. S., He,
L., and Li, B. (2018). Adversarial Attack and Defense
on Graph Data: A Survey.
Tanaka, N., Kera, H., and Kawamoto, K. (2021). Adversar-
ial Bone Length Attack on Action Recognition.
Tolstikhin, I., Houlsby, N., Kolesnikov, A., Beyer, L., Zhai,
X., Unterthiner, T., Yung, J., Steiner, A., Keysers, D.,
Uszkoreit, J., Lucic, M., and Dosovitskiy, A. (2021).
MLP-Mixer: An all-MLP Architecture for Vision.
von Marcard, T., Henschel, R., Black, M. J., Rosenhahn, B.,
and Pons-Moll, G. (2018). Recovering Accurate 3D
Human Pose in the Wild Using IMUs and a Moving
Camera. pages 614–631.
Wu, H., Yunas, S., Rowlands, S., Ruan, W., and Wahlstrom,
J. (2022). Adversarial Detection: Attacking Object
Detection in Real Time.
Xiang, C., Qi, C. R., and Li, B. (2019). Generating 3D
Adversarial Point Clouds. In 2019 IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 9128–9136. IEEE.
Zhang, Z., Jia, J., Wang, B., and Gong, N. Z. (2020). Back-
door Attacks to Graph Neural Networks.
Zhu, D., Zhang, Z., Cui, P., and Zhu, W. (2019). Robust
Graph Convolutional Networks Against Adversarial
Attacks. In Proceedings of the 25th ACM SIGKDD
International Conference on Knowledge Discovery &
Data Mining, pages 1399–1407, New York, NY, USA.
ACM.
Z
¨
ugner, D., Borchert, O., Akbarnejad, A., and G
¨
unnemann,
S. (2020). Adversarial Attacks on Graph Neural Net-
works. ACM Transactions on Knowledge Discovery
from Data, 14(5):1–31.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
242
