
Evaluating Multiple Combinations of Models and Encoders to Segment
Clouds in Satellite Images
Jocsan Ribeiro da Luz Ferreira
1 a
, Leandro Henrique Furtado Pinto Silva
1 b
,
Mauricio Cunha Escarpinati
2 c
, Andr
´
e Ricardo Backes
3 d
and Jo
˜
ao Fernando Mari
1 e
1
Institute of Exacts and Technological Sciences, Federal University of Vic¸osa, Brazil
2
School of Computer Science, Federal University of Uberlandia, Brazil
3
Department of Computing, Federal University of S
˜
ao Carlos, Brazil
Keywords:
Cloud Segmentation, Satellite Images, Deep Learning.
Abstract:
This work evaluates methods based on deep learning to perform cloud segmentation in satellite images. Wwe
compared several semantic segmentation architectures using different encoder structures. In this sense, we
fine-tuned three architectures (U-Net, LinkNet, and PSPNet) with four pre-trained encoders (ResNet-50, VGG-
16, MobileNet V2, and EfficientNet B2). The performance of the models was evaluated using the Cloud-38
dataset. The training process was carried out until the validation loss stabilized, according to the early stopping
criterion, which provides a comparative analysis of the best models and training strategies to perform cloud
segmentation in satellite images. We evaluated the performance using classic evaluation metrics, i.e., pixel
accuracy, mean pixel accuracy, mean IoU, and frequency-based IoU. Results demonstrated that the tested
models are capable of segmenting clouds with considerable performance, with emphasis on the following
values: (i) 96.19% pixel accuracy for LinkNet with VGG-16 encoder, (ii) 92.58% mean pixel accuracy for
U-Net with MobileNet V2 encoder, (iii) 87.21% mean IoU for U-Net with VGG-16 encoder, and (iv) 92.89%
frequency-based IoU for LinkNet with VGG-16 encoder. In short, the results of this study provide valuable
information for developing satellite image analysis solutions in the context of precision agriculture.
1 INTRODUCTION
Agriculture is one of the most critical sectors for hu-
manity. Studies in this area go beyond maximizing
global food production, as aspects of the best use
of all-natural resources are increasingly preponder-
ant for our society (Pellegrina, 2022). Furthermore,
agribusiness significantly moves the Gross Domes-
tic Product of several countries. One of the coun-
tries where we can highlight the sector’s importance
is Brazil, where there is a prominent production of
soybeans, coffee, and corn (IBGE, 2023).
The figures above from Brazil come from in-
vestments in research and technology for the sector,
especially since the Brazilian Agricultural Research
Corporation (Embrapa) implementation in 1973 (Em-
a
https://orcid.org/0009-0007-6832-3147
b
https://orcid.org/0000-0002-5765-5206
c
https://orcid.org/0000-0002-3792-056X
d
https://orcid.org/0000-0002-7486-4253
e
https://orcid.org/0000-0002-9328-8618
brapa, 2023). Such investments provided the imple-
mentation of increasingly robust techniques ranging
from planting to harvesting. This solid technologi-
cal presence can be summarized in what we know as
precision agriculture and agriculture 4.0. Precision
agriculture (PA) consists of the individualized treat-
ment of each crop area. Thus, to carry out such treat-
ment, PA makes extensive use of mapping and imag-
ing techniques, which can come from different cap-
ture sources, such as satellites, unmanned aerial vehi-
cles, and smartphones (Abbasi et al., 2022; da Silva
et al., 2023; Silva et al., 2022).
Satellite images, in particular, can be of a multi-
and hyperspectral nature, which makes it possible to
obtain several relevant agronomic indices for differ-
ent decision-making processes. However, the images
may present artifacts (clouds, shadows, fog, and oth-
ers) that may occlude interest regions and negatively
influence subsequent analyses. One way to mitigate
the presence of clouds is to use image processing
techniques to segment the area with the presence of
these artifacts. Currently, state of the art for this
Ferreira, J., Silva, L., Escarpinati, M., Backes, A. and Mari, J.
Evaluating Multiple Combinations of Models and Encoders to Segment Clouds in Satellite Images.
DOI: 10.5220/0012506700003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 3: VISAPP, pages
233-241
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
233

task consists of semantic segmentation models based
on deep learning, e.g., U-Net, DeepLab, and PSP-
Net (Ronneberger et al., 2015a; Chaurasia and Cu-
lurciello, 2017; Zhao et al., 2017a; Chen et al., 2017).
Thus, this work aims to evaluate different experimen-
tal configurations, varying architectures, and encoders
in segmenting clouds in multispectral satellite im-
ages. We considered three deep-learn-based seman-
tic segmentation architectures (U-Net, LinkNet, and
PSP-Net) combined with four different pre-trained
encoders (ResNet-50, VGG-16, MobileNet V2, and
EfficientNet B2). This work continues a previous
study, available at (Arakaki et al., 2023).
Our comprehensive and pragmatic experimental
setup provides a valuable comparative analysis of the
best deep-learning models and training strategies to
address the challenge of segment clouds in satellite
images. Our results provide useful information for
the development of satellite image analysis solutions
in the context of precision agriculture.
This paper is organized as follows: After this sec-
tion introduces the subject, motivation, and objec-
tives, Section 2 summarizes the state-of-the-art of se-
mantic segmentation methods for clouds in satellite
images. In Section 3, we describe our material and
methods. results are presented and discussed in Sec-
tion 4, and we present our conclusions in Section 5.
2 RELATED WORK
Mohajerani et al. (Mohajerani et al., 2018a) proposed
a cloud segmentation framework based on a fully con-
nected network (FCN) inspired by U-Net. The fully
connected encoder is connected to a fully connected
decoder with some skip connections. the dataset 38-
Cloud was first introduced in this work. In (Moha-
jerani and Saeedi, 2019), Mohajerani et al. proposed
Cloud-Net, a fully connected network intended for
cloud segmentation. Cloud-Net is composed of con-
volutional blocks containing addition, concatenation,
and copy layers, followed by ReLu activation func-
tions. Considering Jaccard, Precision, Recall, Speci-
ficity, and Accuracy, Cloud-Net improved all indexes
when compared with (Mohajerani et al., 2018b).
Gonzales and Sakla (Gonzales and Sakla, 2019)
trained and evaluated a model based on U-Net using
transfer learning to perform semantic segmentation of
clouds in satellite images. Evaluation of the proposed
approach used traditional segmentation metrics (e.g.,
Jaccard, Precision, and Specificity). Experiments
were conducted using the 38-Cloud dataset, which
considers images of a multispectral nature. In this
sense, the proposed approach performed better using
the pre-trained ImageNet encoder for three channels
(red, green, and blue). In contrast, there is better per-
formance for the Near Infrared (NIR) channel when
considering random initialization of weights.
Meraner et al. (Meraner et al., 2020) proposed
an approach based on a Residual Convolutional Neu-
ral Network (ResNet) to remove clouds in multispec-
tral images from the Sentinel-2 satellite. The model
consists of a fully connected architecture, which can
perform on input images with arbitrary spatial dimen-
sions during the training process. The approach pro-
posed by the authors was performed on a dataset from
the geographic region corresponding to the European
continent. To train the approach, such a dataset has
images separated geographically and by seasons to
have the gold standard for subsequent reconstruction
of a region with clouds. In short, the approach pro-
posed by (Meraner et al., 2020) made it possible to
remove extremely thick clouds and reconstruct an op-
tical representation of the Earth’s surface obstructed
in the image by the cloud.
Buttar and Sachan (Buttar and Sachan, 2022) pro-
posed a deep learning-based approach called SE-
UNet++ to perform the cloud segmentation problem
on the 95-Cloud dataset. In general, SEUNet++ is
based on U-Net++ with a lightweight channel atten-
tion mechanism. Furthermore, different backbones
were tried as encoders for the proposed approach
(e.g., ResNet-18, ResNet-34, ResNet-50, ResNet-
101, DenseNet-264, CSPNet, and EfficientNet-B8)
for performance comparison purposes. The experi-
ments showed that SEUNet++ obtained an Intersec-
tion over Union (IoU) value of 91.8%, improving the
state of the art by 0.23%. In addition to IoU, SE-
UNet++ also performed better in indices such as ac-
curacy, precision, and recall, which generates defined
cloud boundaries capable of segmenting thinner cloud
layers. Finally, the authors demonstrated that using
the transfer learning technique had a practical impact
on the task.
(Arakaki et al., 2023) also aimed to evaluate meth-
ods based on deep learning (CNNs in particular) for
segmenting clouds in satellite images. For this, three
models based on the classic U-Net were compared,
each with adaptations in their encoders. The three
models were called Simple U-Net (with no changes
to the basic structure of the traditional network), U-
Net with VGG-16 backbone, and U-Net with ResNet-
18 backbone. The models were trained using the 38-
Cloud dataset and evaluated according to the Recall,
Jaccard, Accuracy, Precision, and Specificity met-
rics. The results showed that U-Net Simples per-
formed better for the Recall, Jaccard, and Accuracy
indices. When considering Precision and Specificity,
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
234
(a) (b)
(c) (d)
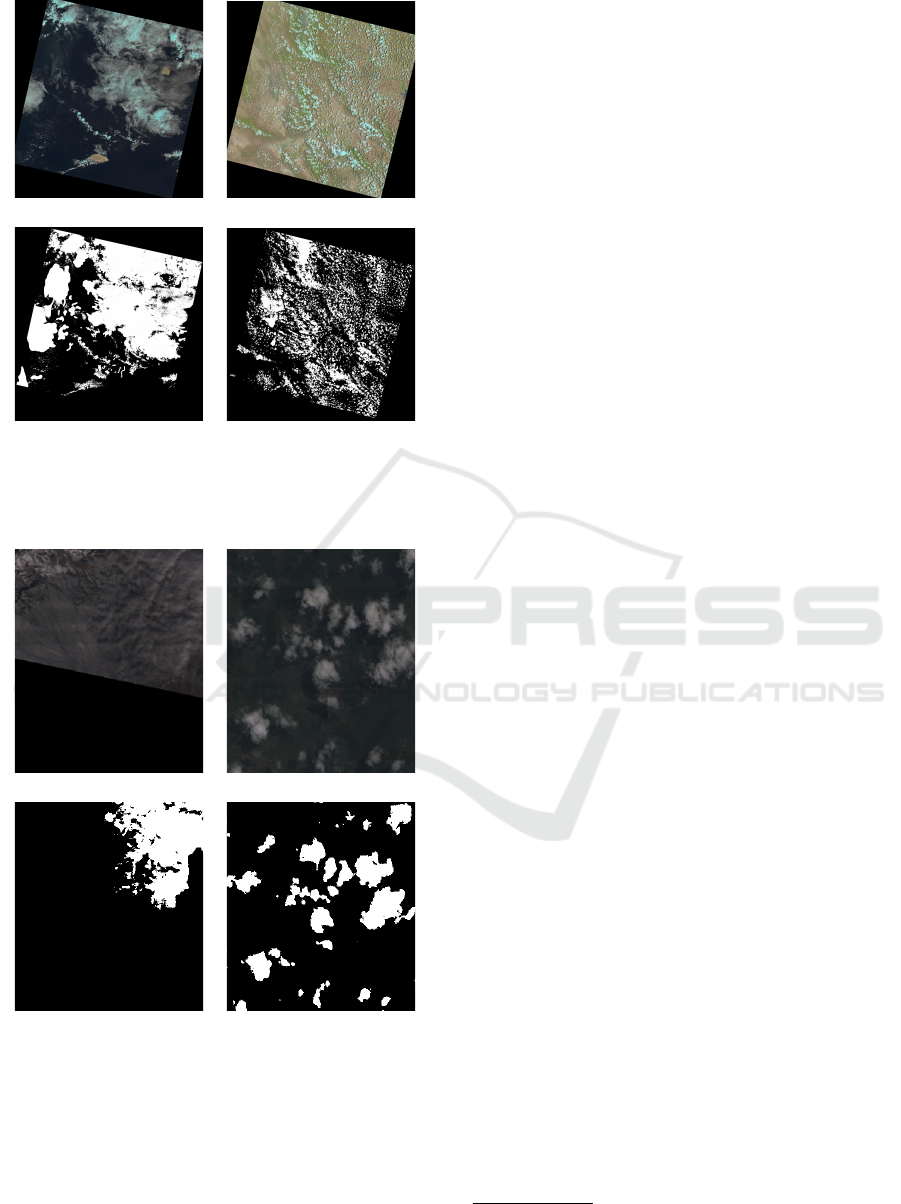
Figure 1: Two samples of the entire scenes available in the
38-Cloud dataset. In pseudo-colors (a - b) and the respective
ground truths (c - d).
(a) (b)
(c) (d)
Figure 2: Two samples of the patch images from the training
set of the 38-Cloud dataset. In gray-scale (a - b) and the
respective ground truths (c - d).
U-Net with ResNet-18 backbone achieved better per-
formance.
3 MATERIAL AND METHODS
3.1 Dataset
The dataset 38-Cloud
1
(Mohajerani et al., 2018a)
(Mohajerani and Saeedi, 2019) was considered for
the experiments. 38-Cloud is composed of 38 com-
plete scenes obtained by the Landsat 8 satellite, 18
scenes for training and 20 for testing. Each scene im-
age was tiled in patches with 384 × 384 pixels. The
training scene images were tiled in 8,400 patches,
and the testing scenes in 9,201 patches. The scenes
are multispectral images, therefore composed of four
channels: Red, Green, Blue, and Near-Infrared (NIR).
Each training set patch has a binary reference image
(ground truth), with the clouds manually delineated.
The test set ground truth is provided only for the com-
plete scenes, and thus, it is necessary to rebuild the
scenes after the segmentation to enable segmentation
evaluation. Figure 1 shows two scenes from the test-
ing set (in pseudo-colors) and their respective ground
truths (binary images). Figure 2 shows two samples
of patches and respective ground truths extracted from
the scenes of the training set.
3.2 CNN Architectures and Encoders
The literature presents many approaches to perform-
ing image segmentation using CNN architectures. To
accomplish this work, we selected three of them.
These CNNs were selected due to their popularity in
many segmentation tasks and good results across the
literature. They are: U-Net, LinkNet, and PSPNet.
U-Net is a popular convolutional neural network
(CNN) architecture primarily used for image segmen-
tation tasks in the field of computer vision and med-
ical image analysis and in various applications that
require pixel-level image classification (Ronneberger
et al., 2015b). Its architecture consists of two main
parts: the encoding path and the decoding path. The
encoding path captures features from the input image
at multiple scales. It typically uses a series of con-
volutional and pooling layers to gradually reduce the
spatial dimensions of the input while increasing the
number of feature channels. This helps the network
learn both low-level and high-level features. The de-
coding path is a symmetric counterpart to the encod-
ing path. It involves a series of upsampling and con-
volutional layers, and its goal is to recover the spatial
resolution of the input image while also incorporating
the learned features from the encoding path. At the
1
https://github.com/SorourMo/
38-Cloud-A-Cloud-Segmentation-Dataset
Evaluating Multiple Combinations of Models and Encoders to Segment Clouds in Satellite Images
235

end of the decoding path, a convolutional layer is used
to produce the final segmentation mask by assigning
to each pixel a specific class or category.
LinkNet is another CNN designed for seman-
tic segmentation tasks (Chaurasia and Culurciello,
2017). Similar to U-Net, it also follows an encoder-
decoder architecture, where the encoding path ex-
tracts features from the input image while the decod-
ing path recovers the spatial information and gener-
ates the segmentation mask. LinkNet uses residual
blocks, inspired by ResNet, in its architecture to help
address the vanishing gradient problem and enable the
training of deep networks. They also contribute to the
network’s ability to capture and learn complex fea-
tures from the input image.
PSPNet, which stands for Pyramid Scene Parsing
Network (Zhao et al., 2017b), is a semantic image
segmentation CNN known for its ability to capture
global context information effectively, making it par-
ticularly suitable for tasks where understanding the
relationships between objects and their surroundings
is crucial, such as scene parsing and object recogni-
tion within images. The core innovation of PSPNet is
the Pyramid Pooling Module, which captures multi-
scale context information from different regions of
the input image. It divides the feature map into a
grid of fixed-size bins and applies average pooling in
each bin. By doing this at multiple scales, PSPNet
gathers contextual information from local to global
scales. This helps the network make informed deci-
sions about the class labels of pixels in the image.
These CNNs use the structure of an encoder, also
named backbone. The models can be interchanged
among multiple encoders. The chosen encoder may
impact the number of learnable parameters and the
performance of the CNN. Thus, we opt to evaluate
different backbones:
• ResNet-50 is a variant of the ResNet (Residual
Network) family and is renowned for its depth
and skip connections (He et al., 2016). It has 50
layers and employs residual blocks, which enable
the training of very deep networks by mitigating
the vanishing gradient problem. These residual
blocks skip connections, or “shortcuts”, that allow
the network to learn residual (difference) func-
tions, making it easier to optimize and improve
accuracy.
• VGG-16, developed by the Visual Geometry
Group at the University of Oxford, is a classic
CNN architecture known for its simplicity and ef-
fectiveness (Simonyan and Zisserman, 2015). It
consists of 16 layers, primarily using small 3 × 3
convolutional filters stacked on top of each other.
The network follows a straightforward pattern,
making it easy to understand and modify, and it
is often used as a baseline model for various com-
puter vision tasks and serves as a benchmark in
image classification.
• MobileNet V2 is a CNN architecture designed for
mobile and embedded devices with limited com-
putational resources, created by Google Research
(Sandler et al., 2018). It focuses on efficiency
and reducing computational demands while main-
taining competitive performance. MobileNetV2
utilizes depthwise separable convolutions, which
significantly reduce the number of parameters and
computations required compared to traditional
convolutions.
• EfficientNet B2 is part of the EfficientNet family
of CNN architectures (Tan and Le, 2019), known
for their impressive scaling principles that balance
model depth, width, and resolution to optimize
performance and efficiency. EfficientNet B2 is
a mid-sized variant with a moderate number of
parameters, making it more efficient than larger
models while still delivering strong results.
For the experiments, we combined each CNN ar-
chitecture with all encoders available, thus resulting
in a total of 12 (3 architectures and 4 encoders) differ-
ent combinations.
3.3 Experiment Design
For this study, we used architectures and pre-trained
encoders available in the Segmentation PyTorch Li-
brary (SMP)
2
(Iakubovskii, 2019), which offers se-
mantic segmentation models such as U-Net, PSPNet,
LinkNet, DeepLabV3, among others. SMP is com-
patible with PyTorch libraries and the Python pro-
gramming language.
We evaluated our trained models using the 38-
Cloud dataset, described in Section 3.1. The 38-
Cloud dataset provides a training set composed of
8,400 images with the size of 384 × 384 pixels, as
described in Section 3.1. The dataset also provides
a separate test set with 9,201 images to evaluate the
quality and generalization capability of the trained
models.
We randomly separated 30% of training images to
build a validation set. This validation set was used
to evaluate the training process, searching for overfit-
ting, and as a parameter for the stopping training early
strategy.
We trained all combinations of architectures and
encoders using the Adam optimizer with an initial
2
https://github.com/qubvel/segmentation models.
pytorch
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
236
...
... ...
Model training
...
Model
validation
Model testing
Test accuracy
Validation
accuracy
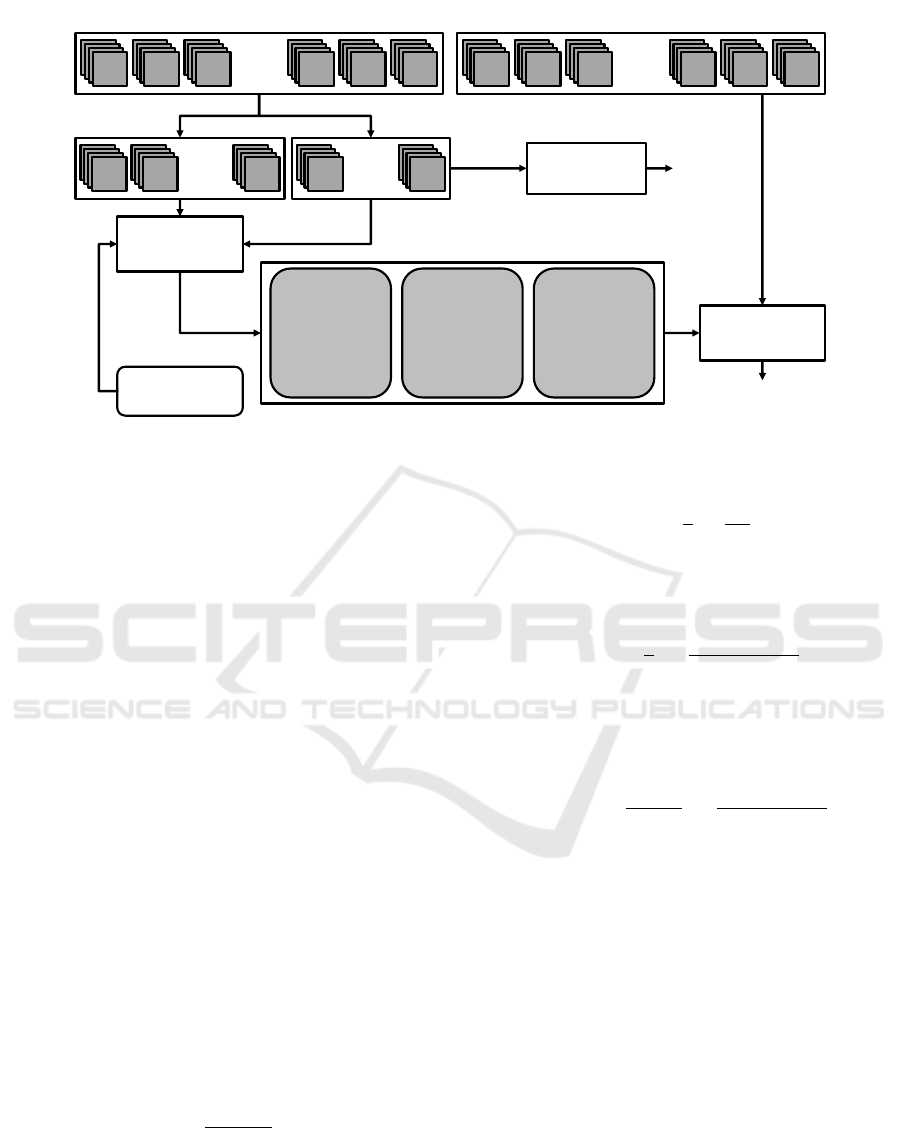
Hyperparameters
Original training set Test set
Training
set
Validation
set
TRAINED MODELS:
U-Net:
• VGG-16
• Resnet-50
• MobileNet V2
• EfficientNet B2
LinkNet:
• VGG-16
• Resnet-50
• MobileNet V2
• EfficientNet B2
PSPNet:
• VGG-16
• Resnet-50
• MobileNet V2
• EfficientNet B2
Figure 3: Illustration of the experiment design, including dataset splitting, model training, and evaluation.
learning rate of 0.0001, and the loss function was the
cross-entropy. All encoders were pre-trained with Im-
ageNet. We reduced the learning by multiplying it by
a factor of 0.1 whenever the validation loss had not
improved along 10 epochs; this strategy is called re-
ducing the learning rate on plateaus. If the valida-
tion loss does not improve for two complete cycles of
learning rate reductions, i.e., a patience value of 21
epochs, we early stop the training process, avoiding
the model entering an overfitting state. We used batch
sizes of 16 for VGG-16, ResNet-50, and EfficientNet
B2 and a batch size of 24 for MobineNet V2.
The experiment design is illustrated in Figure 3.
3.4 Model Evaluation
We evaluate the trained models considering validation
and test sets and the metrics describes in Equations
1-4, where k is the number of classes (in this work
k = 2), n
j j
is the number of true positives, n
i j
is the
number of false positives, n
ji
is the number of false
negatives, and t
j
is the total number of pixels in class
j.
The pixel accuracy, PA, corresponds to the ra-
tio between true positive classifications and the total
number of pixels:
PA =
∑
k−1
j=0
n
j j
∑
k−1
j=0
t
j
(1)
The mean pixel accuracy, mPA, considers the
mean of the accuracy of each class:
mPA =
1
k
k−1
∑
j=0
n
j j
t
j
(2)
The mean IoU, mIoU, is the mean of the IoU com-
puted over each class and is defined as follows:
mIoU =
1
k
k−1
∑
j=0
n
j j
n
i j
+ n
ji
+ n
j j
(3)
In the frequency-based IoU, f wIoU, the mean of
the classes IoU are weighted by its frequency, and it
is computed as follows:
f wIoU =
1
∑
k
j=1
t
j
k−1
∑
j=0
n
j j
n
i j
+ n
ji
+ n
j j
(4)
3.5 Computational Environment
Experiments were conducted in three PC computers
equipped with an i5 processor with 3.0 GHz and 32
GB of RAM. Two PCs were equipped with GPUs
NVIDIA GTX 1080 ti with 11 GB of memory and
one with a NVIDIA Titan XP with 12 GB of mem-
ory. The operating system was Ubuntu 22.04 LTS,
and the experiments were programmed using Python
3.9, PyTorch 2.0.1, torchvision 0.15.12, and CUDA
11.0. The segmentation architectures and pre-trained
encoders were from Segmentation Models PyTorch
(SMP) 0.3.2. We also used Scikit-learn 1.2.0 and
Matplotlib 3.7.1 for plotting.
Evaluating Multiple Combinations of Models and Encoders to Segment Clouds in Satellite Images
237
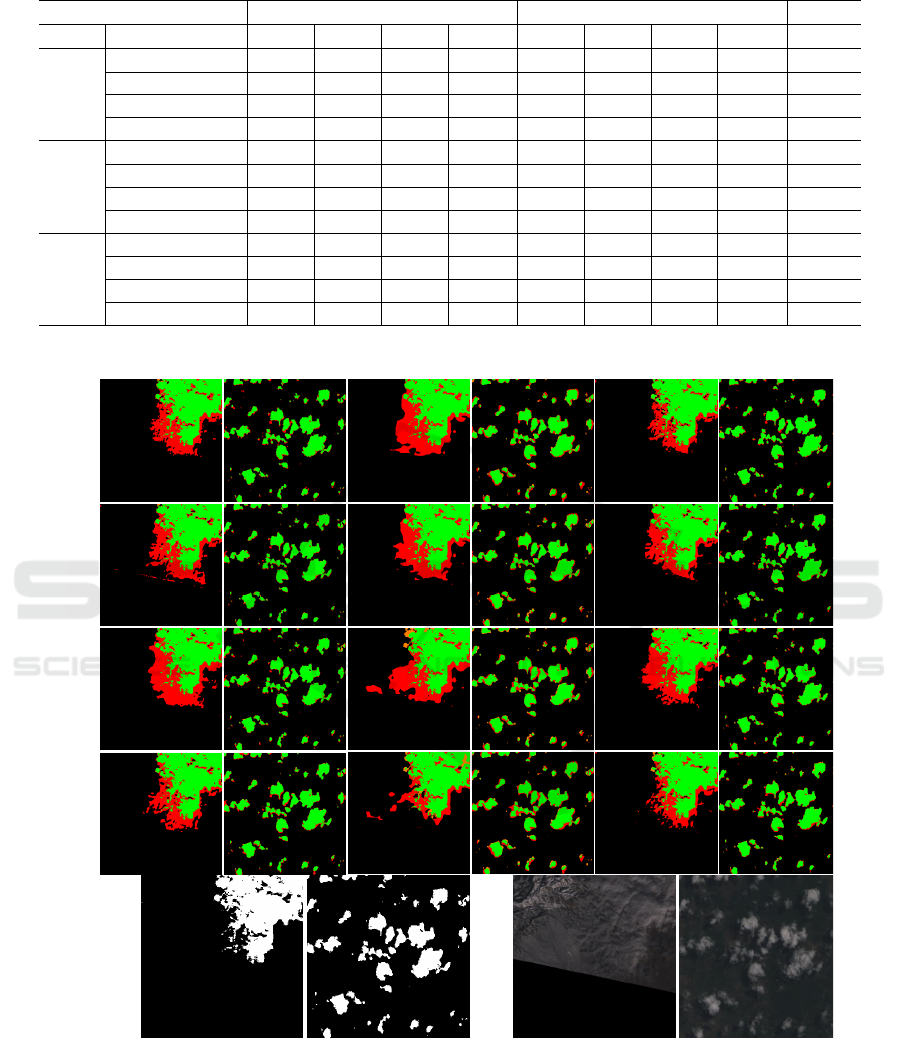
Table 1: Results of the experiment over the validation and test sets.
VAL TEST
Model Encoder PA mPA mIoU f wIoU PA mPA mIoU f wIoU Epochs
U-Net
VGG-16 0.9799 0.9298 0.9031 0.9648 0.9603 0.9154 0.8721 0.9262 196
ResNet-50 0.9782 0.9279 0.8998 0.9623 0.9579 0.9182 0.8676 0.9217 168
MobileNet V2 0.9779 0.9233 0.8973 0.9618 0.9569 0.9258 0.8625 0.9205 139
EfficientNet B2 0.9745 0.9211 0.8895 0.9568 0.9588 0.9194 0.8496 0.9240 75
PSPNet
VGG-16 0.9735 0.9121 0.8811 0.9538 0.9571 0.9095 0.8584 0.9206 132
ResNet-50 0.9738 0.9144 0.8841 0.9545 0.9558 0.9029 0.8501 0.9181 129
MobileNet V2 0.9647 0.8975 0.8642 0.9418 0.9433 0.9079 0.8080 0.9002 92
EfficientNet B2 0.9651 0.8985 0.8655 0.9424 0.9465 0.9169 0.8166 0.9057 78
LinkNet
VGG-16 0.9785 0.9291 0.9007 0.9629 0.9619 0.9126 0.8705 0.9289 147
ResNet-50 0.9788 0.9296 0.9009 0.9633 0.9584 0.9206 0.8606 0.9228 151
MobileNet V2 0.9758 0.9215 0.8913 0.9584 0.9543 0.9074 0.8503 0.9159 115
EfficientNet B2 0.9720 0.9181 0.8850 0.9532 0.9548 0.9127 0.8540 0.9166 111
LinkNet PSPNet U-net
VGG-16 ResNet-50 MobileNet V2 EfficientNet B2
Ground truth
Image (gray level)
Figure 4: Evaluation maps of the segmentation of two images (patches) taken from the validation set.
4 RESULTS AND DISCUSSION
Table 1 shows the results obtained over the valida-
tion and test sets in terms of accuracy, mean accuracy,
mean IoU, and frequency-based IoU. The values for
the validation set (VAL columns) are the means for
the indexes obtained from each one of the 384 × 384
pixels patches. Values for the test set (TEST columns)
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
238
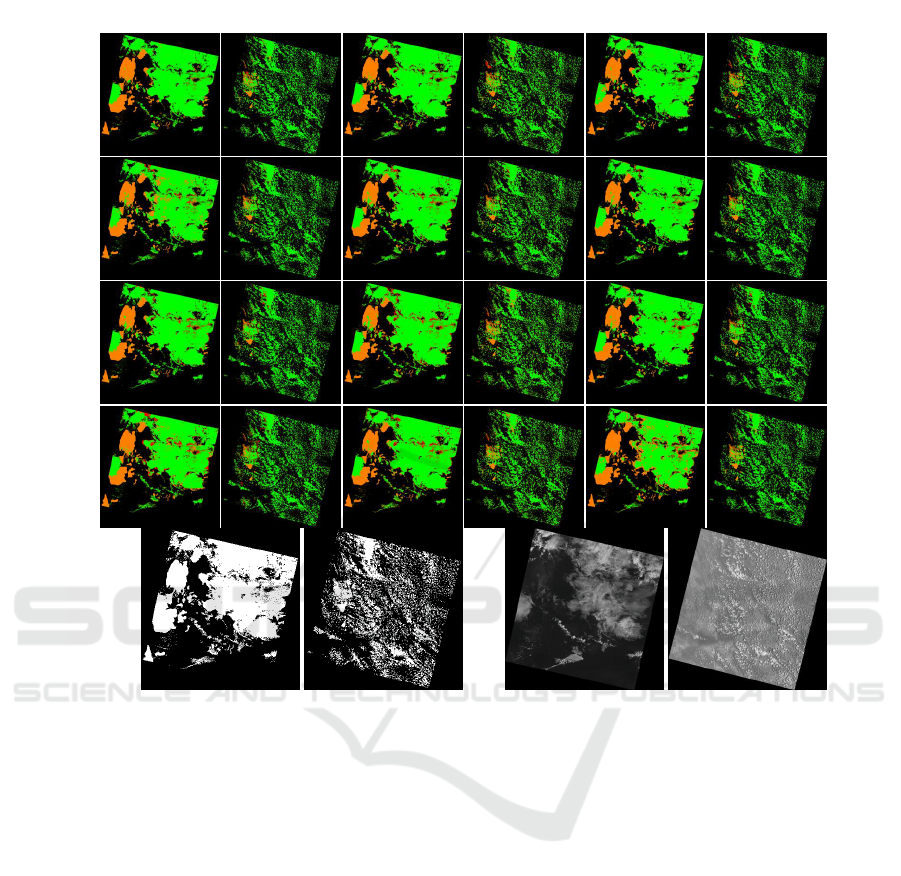
LinkNet
PSPNet
U-net
VGG-16 ResNet-50 MobileNet V2 EfficientNet B2
Ground-truth
Image (gray scale)
Figure 5: Evaluation maps of the segmentation of two complete images (entire images) taken from the test set.
are the means for the indexes obtained for each scene,
reconstructed from the segmented patches. Table
1 also shows the number of training epochs of the
model, i.e., when the early stopping strategy was ac-
tivated. We marked in bold the best value for each
metric in a CNN model. We also marked in italics the
best metric value considering all combinations of ar-
chitecture and encoder.The best values obtained over
the test set were 96.19% pixel accuracy for LinkNet
with VGG-16 encoder, 92.58% mean pixel accuracy
for U-Net with MobileNet V2 encoder, 87.21% mean
IoU for U-Net with VGG-16 encoder, and 92.89%
frequency-based IoU for LinkNet with VGG-16 en-
coder.
Results show that, as expected, deeper network
encoders, such as VGG-16 and ResNet-50, require
more training epochs. They also present a slightly
superior performance compared to shallow encoders,
regardless of the CNN architecture used. Though U-
Net is a simpler CNN model than the compared ones,
it maintains similar performance for the same encoder
in both test and validation sets. This is not true for
other architecture, where ResNet-50 obtains the best
results for the validation set, but VGG-16 is preferred
in the test set (PSPNet). This behavior indicates that
U-Net, in combination with the VGG-16 encoder, has
a greater generalization capacity for learned features.
Figure 4 shows, for each combination of architec-
ture and encoder, a map with the evaluation of the
segmentation for two patches taken from the valida-
tion set. The maps have each pixel colored accord-
ing to the type of correct or incorrect classification:
true positives (TP) are green; true negatives (TN) are
black; false positives (FP) are red; and false negatives
(FN) are orange. In the last row, we show the ground
truth of the images and the gray-level version of the
original patches. Independent of the combination of
CNN architecture and encoder, we notice a tendency
to classify the background as cloud more often than
the opposite. An analysis of the two patches shows
that misclassification is due to the characteristics of
the terrain in the image. Images containing irregular
terrain tend to generate a higher rate of false nega-
tives, i.e., more terrain areas are confused with cloud
Evaluating Multiple Combinations of Models and Encoders to Segment Clouds in Satellite Images
239

regions.
In Figure 5, we show the evaluation maps for two
entire scenes taken from the test set. As in Figure 4,
we colored each pixel according to the type of cor-
rect or incorrect classification: true positives (TP) are
green; true negatives (TN) are black; false positives
(FP) are red; and false negatives (FN) are orange.
In the last row, we show the ground truth of the im-
ages and the gray-level version of the original patches.
When considering the entire map, we notice that all
combinations of architecture and encoder miss large
chunks of clouds and classify them as terrain, thus re-
sulting in a large rate of false negatives (orange color)
in some maps. This usually happens when the map
contains cirrus clouds, which present a delicate and
wispy appearance with white strands. This type of
cloud allows us to see through it, so cloud and terrain
information are mixed, thus explaining the poor CNN
results in these regions.
5 CONCLUSIONS
In this paper, we addressed the problem of cloud
segmentation in satellite images using deep learning.
We investigated three traditional semantic segmenta-
tion networks, namely U-Net, LinkNet, and PSPNet.
We also evaluated four different encoders (ResNet-
50, VGG-16, MobileNet V2, and EfficientNet B2) on
the segmentation results of each network. These en-
coders are responsible for extracting meaningful fea-
tures from the input image and have a direct impact on
the network performance. Results showed that deeper
network encoders, such as VGG-16 and ResNet-50,
present a slightly superior performance compared to
shallow encoders, regardless of the CNN architecture
used. In terms of architecture, U-Net performed better
in comparison to other CNN models, and it was capa-
ble of providing a better generalization of learned fea-
tures between test and validation sets. In future work,
we intend to address the problem of false negatives
(clouds classified as background) due to the inability
of the network to correctly detect clouds presenting a
delicate and wispy appearance.
ACKNOWLEDGEMENTS
Andr
´
e R. Backes gratefully acknowledges the fi-
nancial support of CNPq (Grant #307100/2021-9).
This study was financed in part by the Coordenac¸
˜
ao
de Aperfeic¸oamento de Pessoal de N
´
ıvel Superior
– Brasil (CAPES) – Finance Code 001. Jocsan
R. da Luz Ferreira received a scholarship from
PIBIC/CNPq. We gratefully acknowledge the support
of NVIDIA Corporation, USA with the donation of
the TITAN Xp GPU used for this research
REFERENCES
Abbasi, R., Martinez, P., and Ahmad, R. (2022). The digiti-
zation of agricultural industry–a systematic literature
review on agriculture 4.0. Smart Agricultural Tech-
nology, 2:100042.
Arakaki, L. G., Silva, L. H., da Silva, M. V., Melo, B. M.,
Backes, A. R., Escarpinati, M. C., and Mari, J. F.
(2023). Evaluation of u-net backbones for cloud seg-
mentation in satellite images. In VISIGRAPP (4: VIS-
APP), pages 452–458.
Buttar, P. K. and Sachan, M. K. (2022). Semantic segmen-
tation of clouds in satellite images based on u-net++
architecture and attention mechanism. Expert Systems
with Applications, 209:118380.
Chaurasia, A. and Culurciello, E. (2017). Linknet: Exploit-
ing encoder representations for efficient semantic seg-
mentation. In 2017 IEEE Visual Communications and
Image Processing (VCIP), pages 1–4. IEEE.
Chen, L.-C., Papandreou, G., Kokkinos, I., Murphy, K., and
Yuille, A. L. (2017). Deeplab: Semantic image seg-
mentation with deep convolutional nets, atrous convo-
lution, and fully connected crfs. IEEE transactions on
pattern analysis and machine intelligence, 40(4):834–
848.
da Silva, M. V., Silva, L. H., Junior, J. D. D., Escarpinati,
M. C., Backes, A. R., and Mari, J. F. (2023). Gen-
erating synthetic multispectral images using neural
style transfer: A study with application in channel
alignment. Computers and Electronics in Agriculture,
206:107668.
Embrapa (2023). Sobre a embrapa. Available at:
https://www.embrapa.br/sobre-a-embrapa. Access at:
07/28/2023.
Gonzales, C. and Sakla, W. (2019). Semantic segmentation
of clouds in satellite imagery using deep pre-trained
u-nets. In 2019 IEEE Applied Imagery Pattern Recog-
nition Workshop (AIPR), pages 1–7. IEEE.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Iakubovskii, P. (2019). Segmentation models pytorch. https:
//github.com/qubvel/segmentation models.pytorch.
IBGE (2023). Pib cresce 1,9% no 1º trimestre de
2023. Available at: https://agenciadenoticias.
ibge.gov.br/agencia-sala-de-imprensa/
2013-agencia-de-noticias/releases/
37029-pib-cresce-1-9-no-1-trimestre-de-2023.
Access at: 07/28/2023.
Meraner, A., Ebel, P., Zhu, X. X., and Schmitt, M. (2020).
Cloud removal in sentinel-2 imagery using a deep
residual neural network and sar-optical data fusion.
ISPRS Journal of Photogrammetry and Remote Sens-
ing, 166:333–346.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
240

Mohajerani, S., Krammer, T. A., and Saeedi, P. (2018a).
Cloud detection algorithm for remote sensing im-
ages using fully convolutional neural networks. arXiv
preprint arXiv:1810.05782.
Mohajerani, S., Krammer, T. A., and Saeedi, P. (2018b).
Cloud Detection Algorithm for Remote Sensing Im-
ages Using Fully Convolutional Neural Networks.
arXiv:1810.05782 [cs].
Mohajerani, S. and Saeedi, P. (2019). Cloud-net: An end-to-
end cloud detection algorithm for landsat 8 imagery.
In IGARSS 2019-2019 IEEE International Geoscience
and Remote Sensing Symposium, pages 1029–1032.
IEEE.
Pellegrina, H. S. (2022). Trade, productivity, and the spa-
tial organization of agriculture: Evidence from brazil.
Journal of Development Economics, 156:102816.
Ronneberger, O., Fischer, P., and Brox, T. (2015a). U-
net: Convolutional networks for biomedical image
segmentation. In International Conference on Medi-
cal image computing and computer-assisted interven-
tion, pages 234–241. Springer.
Ronneberger, O., Fischer, P., and Brox, T. (2015b). U-
net: Convolutional networks for biomedical image
segmentation. In International Conference on Medi-
cal image computing and computer-assisted interven-
tion, pages 234–241. Springer.
Sandler, M., Howard, A. G., Zhu, M., Zhmoginov, A., and
Chen, L. (2018). Inverted residuals and linear bottle-
necks: Mobile networks for classification, detection
and segmentation. CoRR, abs/1801.04381.
Silva, L. H. F. P., J
¨
unior, J. D. D., Mari, J. F., Escarpinati,
M. C., and Backes, A. R. (2022). Non-linear co-
registration in uavs’ images using deep learning. In
2022 35th SIBGRAPI Conference on Graphics, Pat-
terns and Images (SIBGRAPI), volume 1, pages 1–6.
IEEE.
Simonyan, K. and Zisserman, A. (2015). Very deep convo-
lutional networks for large-scale image recognition.
Tan, M. and Le, Q. (2019). Efficientnet: Rethinking model
scaling for convolutional neural networks. In Interna-
tional conference on machine learning, pages 6105–
6114. PMLR.
Zhao, H., Shi, J., Qi, X., Wang, X., and Jia, J. (2017a).
Pyramid scene parsing network. In Proceedings of
the IEEE Conference on Computer Vision and Pattern
Recognition (CVPR).
Zhao, H., Shi, J., Qi, X., Wang, X., and Jia, J. (2017b).
Pyramid Scene Parsing Network. In 2017 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), page 6230–6239. IEEE.
Evaluating Multiple Combinations of Models and Encoders to Segment Clouds in Satellite Images
241
