
A Soft Constraint-Based Framework for Ethical Reasoning
Hiroshi Hosobe
1 a
and Ken Satoh
2
1
Faculty of Computer and Information Sciences, Hosei University, Tokyo, Japan
2
National Institute of Informatics, Tokyo, Japan
Keywords:
Ethical Norm, Constraint Programming, Soft Constraint.
Abstract:
Artificial intelligence is becoming more widely used for making decisions in many application areas, where
it often needs to consider legal rules and ethical norms. However, ethical norms are more difficult to treat
than legal rules that have logical nature. Taheri et al. proposed a framework that formalized several important
aspects of ethical decision making. However, their framework is still not powerful enough for more general
problem solving. In this paper, we propose a soft constraint-based framework for ethical reasoning. Espe-
cially by devising the notion of norm constraints, we integrate Taheri et al.’s framework into Borning et al.’s
constraint hierarchy framework for treating soft constraints. We also present a case study on the application
of our framework to ethical reasoning.
1 INTRODUCTION
Artificial intelligence is becoming more widely used
for making decisions in many application areas,
where it often needs to consider legal rules and ethical
norms. To treat legal rules, legal reasoning has long
been studied. An effective and promising approach is
logic programming. For example, a Prolog-based sys-
tem was developed for the purpose of reasoning about
the Japanese civil code (Satoh et al., 2010).
Ethical reasoning also has been studied. How-
ever, ethical norms are more difficult to treat than le-
gal rules that have logical nature. One problem is that
ethical norms are not explicitly specified unlike legal
rules that are specified in laws. Another more essen-
tial problem is that how to represent and evaluate eth-
ical norms is unclear. Another is that there are many
kinds of ethical norms that should be simultaneously
considered but that might be conflicting.
To tackle these problems, Taheri et al. proposed a
framework for ethical decision making (Taheri et al.,
2023). Their framework formalized several important
aspects of ethical decision making including how to
organize ethical norms, how to evaluate choices ac-
cording to individual norms, how to aggregate such
evaluations for different classes of norms, and how
to determine the best choices according to the entire
norms.
a
https://orcid.org/0000-0002-7975-052X
However, Taheri et al.’s framework is still not
powerful enough for more general problem solving.
Basically, what the framework does is to compare
choices according to given norms. Therefore, it needs
to be combined with another method to handle rules
and knowledge other than ethical norms. In fact, in
addition to the ethical decision making framework,
they needed to use a planner and a legal checker to
develop a multi-agent real-time compliance mecha-
nism (Hayashi et al., 2023). The ethical decision mak-
ing framework worked as an ethical checker to select
the ethically best plans from the legal plans generated
by the planner and the legal checker.
In this paper, we propose a soft constraint-based
framework for ethical reasoning. Our goal is to con-
struct a unifying framework that enables expressive
ethical decision making as well as powerful constraint
programming. Especially by devising the notion of
norm constraints, we integrate Taheri et al.’s frame-
work into Borning et al.’s constraint hierarchy frame-
work (Borning et al., 1992) for treating soft con-
straints. The resulting framework has twofold charac-
ters. On one hand, it can be regarded as an extension
of Taheri et al.’s ethical decision making framework to
constraint-based reasoning. On the other hand, it can
be regarded as a special case of Borning et al.’s con-
straint hierarchy framework with concrete application
to ethical reasoning.
The rest of this paper is organized as follows. Sec-
tion 2 describes previous research that is related to our
1354
Hosobe, H. and Satoh, K.
A Soft Constraint-Based Framework for Ethical Reasoning.
DOI: 10.5220/0012474100003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 3, pages 1354-1361
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

work. Section 3 briefly explains Taheri et al.’s frame-
work and Borning et al.’s framework. Section 4 pro-
poses our soft constraint-based framework for ethical
reasoning. Section 5 presents a case study on the ap-
plication of our framework to ethical reasoning. Sec-
tion 6 discusses our framework. Finally, Section 7
gives conclusions and future work.
2 RELATED WORK
Satoh et al. proposed the use of constraints for le-
gal and ethical reasoning (Satoh et al., 2021). More
specifically, they proposed to use hard constraints
for legal rules and to use soft constraints for ethical
norms. They showed their concept by developing a
system based on abductive planning with event cal-
culus (Eshghi, 1988). However, their treatment of
soft constraints was still limited as compared to other
soft constraint frameworks such as constraint hierar-
chies (Borning et al., 1992).
Fungwacharakorn et al. proposed the use of
constraint hierarchies to treat ethical norms (Fung-
wacharakorn et al., 2022a; Fungwacharakorn et al.,
2022b). They represented ethical norms as soft con-
straints and studied the property of fundamental revi-
sions and the debugging of represented norms. How-
ever, they used logical constraints that were evaluated
as true or false, and did not consider more general soft
constraints that could be evaluated in a more detailed
manner as shown in this paper.
3 PRELIMINARIES
In this section, we explain two frameworks as prelim-
inaries to our framework.
3.1 Ethical Decision Making
First, we briefly explain Taheri et al.’s ethical deci-
sion making framework, which was originally pro-
posed in (Taheri et al., 2023) and also was briefly
explained in (Hayashi et al., 2023). The framework
treats various ethical norms such as data minimality,
data sensitivity, gender fairness, racial fairness, and
even system performance. In addition, it provides a
mechanism for organizing such norms into multiple
norm classes (that can be hierarchically structured).
For example, data minimality and data sensitivity can
be classified in a norm class called privacy. There
may be other norm classes such as fairness and per-
formance.
Norms are represented as a tuple of norm classes
N = hN
1
,N
2
,...,N
l
i, where l is some positive inte-
ger, and each N
i
indicates a norm class consisting of
norms. Each norm is used to rank alternatives (or
choices to be compared in decision making) in a given
set A. A norm class aggregates the results of the rank-
ings of the norms in the class by using a voting mech-
anism. The framework especially chooses Copeland’s
rule (Saari and Merlin, 1996) for this purpose. Intu-
itively, Copeland’s rule computes the Copeland score
s(a,N
i
) of an alternative a ∈ A according to a norm
class N
i
. A higher Copeland score of a indicates that
a is better.
The framework selects the best alternatives by us-
ing a relation called superiority for comparing al-
ternatives according to norm classes with an order,
which is defined as follows.
1
Definition 1 (superiority). Given alternatives a,a
0
∈
A, a tuple N = hN
1
,N
2
,...,N
l
i of norm classes, and
a partial order <
N
on {1,...,l}, the superiority of a
over a
0
according to N with <
N
is defined as
superior(a,a
0
,N,<
N
) ≡
∃k ∈ {1,...,l}(∀i ∈ {1,...,l}
(i <
N
k → s(a,N
i
) = s(a
0
,N
i
))∧
s(a,N
k
) > s(a
0
,N
k
)).
3.2 Constraint Hierarchies
Next, we briefly explain Borning et al.’s constraint hi-
erarchy framework (Borning et al., 1992). Let X be a
set of variables. How to assign values to variables is
expressed as a valuation that is a function from vari-
ables to their values. Let Θ be the set of all the valu-
ations. Then a valuation θ ∈ Θ obtains the value of a
variable x ∈ X as θ(x). Let C be a set of constraints.
How much a constraint is satisfied by a valuation is
given by an error function e. Specifically, e(c,θ) re-
turns a non-negative real number: returning 0 means
that c is exactly satisfied by θ; returning a larger num-
ber means that c is less satisfied.
A constraint hierarchy is typically represented as
H = hH
0
,H
1
,...,H
l
i, where l is some positive inte-
ger, and each H
i
, called a level, is a set of constraints.
Level H
0
consists of required (or hard) constraints
that must be exactly satisfied while each H
i
with i ≥ 1
consists of preferential (or soft) constraints that can
be relaxed if necessary. A typical constraint hierar-
1
We simplified the formulation of the superiority rela-
tion by using a partial order and a standard definition of lex-
icographic ordering. The original framework (Taheri et al.,
2023) gives a more complex formulation of this relation by
using a total preorder.
A Soft Constraint-Based Framework for Ethical Reasoning
1355

chy is totally ordered, which means that a preferen-
tial level H
i
with smaller i consists of more important
constraints.
In this paper, we treat partially ordered hierar-
chies. A partially ordered hierarchy is represented
as hH, <
H
i, where H = hH
0
,H
1
,...,H
l
i, and <
H
is a
partial order on {0,1,. ..,l} with 0 as the only small-
est element. The intuitive meaning of the required
level H
0
is the same as in the case of totally ordered
hierarchies. By contrast, the importance of the pref-
erential levels is specified by partial order <
H
; that is,
if i <
H
j, H
i
has more important constraints than H
j
.
To define solutions to a partially ordered hierar-
chy, the notion of consistent totally ordered hierar-
chies is used. Given a partially ordered hierarchy
hH,<
H
i, hH,<
0
H
i is a consistent totally ordered hi-
erarchy if <
0
H
is a total order on {0, 1, . . . , l} with 0
as the smallest element and there is a bijective map-
ping m of type {0,1,...,l} → {0,1,...,l} such that
i <
H
j → m(i) <
0
H
m( j).
2
Intuitively, a consistent to-
tally ordered hierarchy is a modification of a partially
ordered hierarchy that rearranges preferential levels
in a total order in such a way that any pair of ordered
levels in the original partially ordered hierarchy will
keep the same order in the resulting totally ordered
hierarchy.
The importance of constraints in a constraint hi-
erarchy is evaluated by a comparator better. In-
tuitively, better(θ,θ
0
,S
0
,hH,<
0
H
i) judges whether a
valuation θ is better than another θ
0
with respect to al-
ternative valuations S
0
according to a totally ordered
hierarchy hH,<
0
H
i that is consistent with a partially
ordered hierarchy hH,<
H
i. It should be noted that the
better comparator internally uses the error function e
to evaluate individual constraints.
The solution set of a partially ordered hierarchy
is defined as the union of the solution sets of all the
totally ordered constraint hierarchies consistent with
the original partially ordered hierarchy.
Definition 2 (solution). Given a partially ordered hi-
erarchy hH, <
H
i, the set S
po
(hH,<
H
i) of all the solu-
tions to hH,<
H
i is defined as
S
po
(hH,<
H
i) =
[
hH,<
0
H
i∈H
S
to
(hH,<
0
H
i)
where H is the set of all the totally ordered hierar-
2
We simplified the definition of consistent totally or-
dered hierarchies by removing a possible operation of merg-
ing levels. This operation may impose a problem, which is
discussed in (Borning et al., 1992). Chiu and Lee also dis-
cuss the problem and present a more complex definition of
solutions (Chiu and Lee, 1998).
chies consistent with hH,<
H
i and
S
to
(hH,<
0
H
i) ={θ ∈ S
0
|∀θ
0
∈ S
0
(¬better(θ
0
,θ,S
0
,hH,<
0
H
i))}
where
S
0
= {θ ∈ Θ |∀c ∈ H
0
(e(c,θ) = 0)}.
In this definition, S
0
indicates the set of all the
valuations that satisfy the required constraints. Also,
S
to
(hH,<
0
H
i) indicates the set of all the solutions to
a totally ordered hierarchy hH, <
0
H
i, which is deter-
mined by collecting the “best” valuations from S
0
.
4 PROPOSED FRAMEWORK
In this section, we propose a soft constraint-based
framework for ethical reasoning. To begin with, we
introduce a new kind of constraints called norm con-
straints. Intuitively, a norm constraint evaluates a
given valuation according to the associated norm and
assigns a rank to the valuation. Let C
norm
be a set
of norm constraints. Then the meaning of norm con-
straints is defined with a ranking function r. Intu-
itively, r(c, θ) obtains the rank of a valuation θ ac-
cording to a norm constraint c. Ranks are expressed
with positive integers, and a smaller positive integer
indicates a better rank, typically with 1 as the best.
This is formally defined as follows.
Definition 3 (ranking function). Let Z
+
be the set of
all the positive integers. A ranking function r is a
function of type C
norm
× Θ → Z
+
.
We use the notion of partially ordered hierarchies,
which we explained in Subsection 3.2. Therefore,
we define a constraint hierarchy as a pair hH, <
H
i,
where H = hH
0
,H
1
,...,H
l
i and <
H
is a partial or-
der on {0, 1, . . . , l} with 0 as the only smallest ele-
ment. We assume that the required level H
0
consists
of only ordinary constraints and that the other lev-
els H
1
,...,H
l
, called the norm levels, consist of only
norm constraints
To evaluate how much a valuation satisfies a norm
level, we use a combining function g that computes
the Copeland score of the valuation according to the
norm level. Intuitively, g(θ,S
0
,H
i
) computes the
Copeland score of a valuation θ with respective to al-
ternative valuations S
0
according to a norm level H
i
.
This is defined as follows.
Definition 4 (combining function). Given a valuation
θ, a set S
0
of valuations with θ (i.e., θ ∈ S
0
), and a set
H
i
of norm constraints, the combining function g is
defined as
g(θ,S
0
,H
i
) =
∑
θ
0
∈S
0
\{θ}
p(θ,θ
0
,H
i
)
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
1356

where
p(θ,θ
0
,H
i
) =
1 if w(θ,θ
0
,H
i
) > w(θ
0
,θ,H
i
)
1/2 if w(θ,θ
0
,H
i
) = w(θ
0
,θ,H
i
)
0 otherwise
where
w(θ,θ
0
,H
i
) =
{c ∈ H
i
|r(c, θ) < r(c,θ
0
)}
.
This definition is based on an adaptation of
Copeland scores to our framework. Function
w(θ,θ
0
,H
i
) uses the ranking function r to compute
the number of the wins of θ against θ
0
according to
the norm constraints in H
i
. Function p(θ, θ
0
,H
i
) com-
putes the elemental score of θ against θ
0
according to
H
i
. Finally, function g(θ,S
0
,H
i
) accumulates the el-
emental scores to compute the Copeland score of θ
according to H
i
Next, we define a comparator better for our
framework. Although we treat a partially ordered hi-
erarchy, we define it for a totally ordered hierarchy by
following the original framework.
Definition 5 (comparator). Given a constraint hierar-
chy hH, <
H
i, valuations θ and θ
0
, a set S
0
of valua-
tions with θ and θ
0
(i.e., θ,θ
0
∈ S
0
), and a total order
<
0
H
consistent with <
H
, the comparator better is de-
fined as
better(θ,θ
0
,S
0
,hH,<
0
H
i) ≡
∃k ∈ {1,...,l}(∀i ∈ {1,...,l}
(i <
0
H
k → g(θ,S
0
,H
i
) = g(θ
0
,S
0
,H
i
)) ∧
g(θ,S
0
,H
i
) > g(θ
0
,S
0
,H
i
)).
This comparator is defined as the lexicographic or-
dering using the total order and the Copeland scores
of norm levels. The nature of the lexicographic order-
ing more highly evaluates a valuation if it obtains a
higher Copeland score at an upper level.
We define solutions to a constraint hierarchy in the
same way as solutions to a partially ordered hierarchy
in the original framework. Specifically, the set of all
the solutions to a given constraint hierarchy hH,<
H
i
is S
po
(hH,<
H
i), which is formulated by Definition 2.
Finally, we present a theorem that relates our
framework with Taheri et al.’s ethical decision mak-
ing framework. It allows us to regard our framework
as an extension of Taheri et al.’s framework.
Theorem 1. Let A be an arbitrary set of alterna-
tives, N = hN
1
,N
2
,...,N
l
i be an arbitrary tuple of
norm classes, and <
N
be an arbitrary partial order
on {1, . . . , l}. Let X = {x} be the set of a variable
x, and Θ be the set of all the valuations from X to
A. Regard the norms in N as norm constraints and
the ranking of alternatives in A by norms in N as a
ranking function r. Let H = h
/
0,N
1
,N
2
,...,N
l
i be a
constraint hierarchy. Then the following holds:
S
po
(hH,<
H
i) = {θ ∈ Θ | θ(x) = a ∧
∀a
0
∈ A(¬superior(a
0
,a,N,<
N
))}.
Intuitively, this theorem says that the constraint
hierarchy constructed from an ethical decision mak-
ing problem based on Taheri et al.’s framework ob-
tains the same set of solutions as the original prob-
lem. Note that the resulting constraint hierarchy has
only one variable and no required constraints.
5 CASE STUDY
In this section, we conduct a case study on the appli-
cation of the proposed framework to ethical reason-
ing.
5.1 Modeling a Problem
This case study uses a problem adapted from Hayashi
et al.’s use case of their multi-agent real-time compli-
ance mechanism (Hayashi et al., 2023). It supposes a
job recommendation service operated by an employ-
ment platform company and performs legal and ethi-
cal reasoning. They implement this service as a dis-
tributed system consisting of multiple nodes in dif-
ferent regions, some of which are inside the Euro-
pean Union (EU) and the others of which are out-
side. They want to process their customers’ data by
using a remote processing node. Although both their
user node and the remote processing node are inside
the EU, some of the intermediate nodes between these
nodes are outside the EU. Since the data include the
customers’ privacy information, they need to treat the
data by following legal rules such as the EU’s Gen-
eral Data Protection Regulation (GDPR). In addition,
they want to treat the data by respecting ethical norms
such as privacy and fairness.
This use case is represented as a simplified
problem illustrated in Figure 1. The company
has two datasets, data1 and data2, at the user
node. While they can use data1 for two purposes,
recommendation and analysis, they are legally al-
lowed to use data2 only for analysis. The remote
processing nodes can execute two kinds of processes,
process1 and process2, which have different charac-
teristics. The user node and the processing node are
connected along two routes, one with node1 and the
other with node2 as an intermediate node. While
node1 is inside the EU, node2 is outside the EU.
When they process a dataset, it is transferred from
the user node to the processing node via either node1
A Soft Constraint-Based Framework for Ethical Reasoning
1357

User node
Node 1
Node 2
Processing
node
Dataset 1
Dataset 2
Process 1
Process 2
EU
Non-EU
Figure 1: Problem of legal and ethical reasoning for a job
recommendation service adapted from Hayashi et al.’s use
case of their compliance mechanism (Hayashi et al., 2023).
or node2, then it is processed by either process1 or
process2 at the processing node, and the result is re-
turned to the user node via either node1 or node2.
Now we model this problem as a constraint hierar-
chy by using our framework. First, we introduce five
variables with finite domains, d ∈ {data1,data2}, u ∈
{recommendation,analysis}, n,m ∈ {node1,node2},
and p ∈ {process1, process2}. Variable d indicates
which of datasets data1 and data2 is used. Variable u
indicates for which of purposes recommendation and
analysis the dataset should be used. Variables n and
m indicate which of intermediate nodes node1 and
node2 should be used when the dataset is transferred
to the processing node and when it is returned to the
user node respectively. Variable p indicates which of
processes process1 and process2 should be used when
the dataset is processed at the processing node.
Next, to express the legal rule, we introduce the
following required constraint:
d = data2 → u = analysis. (1)
This constraint means that data2 is legally allowed to
be used only for analysis.
In the following, we associate norm con-
straints with symbolic norms to distinguish how
important they are. Specifically, we have six sym-
bolic norms, data minimality, data sensitivity,
transfer safety, node safety, algo unbiasedness,
and transfer efficiency. More generally, norms
data minimality, data sensitivity, transfer safety,
and node safety are related to the ethical norm of
privacy, algo unbiasedness (for algorithmic unbiased-
ness) is related to fairness, and transfer efficiency is
related to performance. (In the next subsection, we
consider such a classification of the norms.)
We represent each norm constraint as a sequence
of more primitive constraints separated with either re-
lation of or ◦. Relation indicates that satisfying its
left-hand side is better than satisfying its right-hand
side, and relation ◦ indicates that satisfying its left-
hand side is as good as satisfying its right-hand side
in the sense of the associated norm.
To represent ethical norms in this problem, we in-
troduce the following norm constraints:
data minimality (d = data1) (d = data2) (2)
data sensitivity (d = data1) (d = data2) (3)
transfer safety (n = node1 ∧ m = node1)
(n = node1 ∧ m = node2) ◦
(n = node2 ∧ m = node1)
(n = node2 ∧ m = node2) (4)
node safety (n = node1 ∧ m = node1)
(n = node1 ∧ m = node2) ◦
(n = node2 ∧ m = node1)
(n = node2 ∧ m = node2) (5)
algo unbiasedness (p = process1)
(p = process2) (6)
transfer efficiency (n = node2 ∧ m = node2)
(n = node1 ∧ m = node2) ◦
(n = node2 ∧ m = node1)
(n = node1 ∧ m = node1). (7)
Intuitively, constraints (2) and (3) mean that, in the
senses of data minimality and data sensitivity re-
spectively, using data1 is better than using data2.
Constraints (4) and (5) mean that, in the senses
of transfer safety and node safety respectively, us-
ing node1 twice is the best, using node2 only once
is the second best, and using node2 twice is the
worst. Constraint (6) means that, in the sense of
algo unbiasedness, using process1 is better than us-
ing process2. Constraint (7) means that, in the sense
of transfer efficiency, using node2 twice is the best,
using node1 only once is the second best, and using
node1 twice is the worst.
This problem especially considers the case where
a dataset is used for the purpose of recommendation,
which is expressed by further introducing the follow-
ing required constraint:
u = recommendation. (8)
Now the entire problem has nearly been modeled as
a constraint hierarchy consisting of two required con-
straints (1) and (8) and six norm constraints (2) to (7)
although norm levels are yet to be introduced.
5.2 Solving the Problem
We solve the problem modeled in the previous sub-
section.
3
First, we satisfy the required constraints
3
In this paper, we manually solve the problem by fol-
lowing the formulation of our framework, without introduc-
ing a concrete algorithm.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
1358
required
all norms
required
privacy
fairness
performance
required
privacy
fairness performance
(a) (b) (c)
required
privacy fairness
performance
required
privacy fairness
performance
(d) (e)
Figure 2: Structures of constraint hierarchies.
(1) and (8). Constraint (8) uniquely determines u
as recommendation, which further determines d as
data1 because of constraint (1) and the domain of d.
There are still eight potential solutions that can assign
different combinations of values to variables n, m, and
p. Their values need to be determined by further con-
sidering the norm constraints.
To show the effects of our framework, we con-
sider different structures of constraint hierarchies.
First, we suppose the simplest case where all the
six norms belong to one norm level as shown in
Figure 2(a). In this case, all the norms are aggre-
gated to compare the potential solutions that satisfy
the required constraints, which determines the solu-
tions to the constraint hierarchy. Table 1 shows this
process. Initially, each potential solution is associ-
ated with the six ranks that are indicated as norm-
wise ranks in this table. For example, potential
solution hd, u, n, m, pi = hdata1, recommendation,
node1, node1, process1i has the first rank for norm
transfer safety since assigning node1 to both n and m
is specified as the best by the norm constraint (4) as-
sociated with transfer safety. Next, for each potential
solution, its Copeland score is computed from their
norm-wise ranks. Finally, hd, u, n, m, pi = hdata1,
recommendation, node1, node1, process1i is deter-
mined as only the solution to the constraint hierar-
chy since it was given the highest Copeland score
of 7.0. Intuitively, this solution means that data1
should be used for recommendation, should be trans-
ferred to the processing node via node1, should be
processed by process1, and should be returned to the
user node via node1. Note that this solution is given
the first norm-wise ranks by the five norms other than
transfer efficiency.
Next, we consider a case where there are three
norm levels, privacy, fairness, and performance.
In this case, level privacy consists of four norms
Table 1: Case where all the six norms belong to one
norm level. Norms data minimality, data sensitivity,
transfer safety, node safety, algo unbiasedness,
and transfer efficiency and variable values data1,
recommendation, node1, node2, process1, and process2
are abbreviated as dm, ds, ts, ns, au, te, d1, rec, n1, n2,
p1, and p2 respectively.
Potential solution Norm-wise ranks Cope- Level-
land wise
hd, u, n, m, pi dm ds ts ns au te score rank
hd1, rec, n1, n1, p1i 1 1 1 1 1 3 7.0 1
hd1, rec, n1, n2, p1i 1 1 2 2 1 2 5.0 2
hd1, rec, n2, n1, p1i 1 1 2 2 1 2 5.0 2
hd1, rec, n2, n2, p1i 1 1 3 3 1 1 2.5 4
hd1, rec, n1, n1, p2i 1 1 1 1 2 3 4.5 3
hd1, rec, n1, n2, p2i 1 1 2 2 2 2 2.0 5
hd1, rec, n2, n1, p2i 1 1 2 2 2 2 2.0 5
hd1, rec, n2, n2, p2i 1 1 3 3 2 1 0.0 6
Table 2: Case where four out of the six norms belong to
norm level privacy. The norms and the variable values are
abbreviated in the same way as in Table 1.
Potential solution Norm-wise ranks Cope- Level-
land wise
hd, u, n, m, pi dm ds ts ns score rank
hd1, rec, n1, n1, p1i 1 1 1 1 6.5 1
hd1, rec, n1, n2, p1i 1 1 2 2 3.5 2
hd1, rec, n2, n1, p1i 1 1 2 2 3.5 2
hd1, rec, n2, n2, p1i 1 1 3 3 0.5 3
hd1, rec, n1, n1, p2i 1 1 1 1 6.5 1
hd1, rec, n1, n2, p2i 1 1 2 2 3.5 2
hd1, rec, n2, n1, p2i 1 1 2 2 3.5 2
hd1, rec, n2, n2, p2i 1 1 3 3 0.5 3
data minimality, data sensitivity, transfer safety,
and node safety, level fairness consists of one norm
algo unbiasedness, and level performance consists of
the other one norm transfer efficiency. Since lev-
els privacy and fairness consist of only one norm,
their level-wise rankings of the potential solutions are
the same as the underlying norm-wise rankings due
to the nature of Copeland’s rule. For level privacy,
we need to compute its level-wise ranking, which is
shown in Table 2. In the same way as the previ-
ous case, the four norm-wise ranks are aggregated to
calculate their Copeland scores, which separates the
potential solutions into three ranks. Especially, note
that two potential solutions hd, u, n, m, pi = hdata1,
recommendation, node1, node1, process1i, hdata1,
recommendation, node1, node1, process2i are given
the first level-wise rank in this case.
To handle the three norm levels, we further con-
sider their partial orders. It should be noted that,
in the typical use of a constraint hierarchy, such
a partial order is determined at its modeling stage.
However, in the following, we show all the possi-
ble partial orders to illustrate our framework. Since
there are three norm levels, we can consider the
A Soft Constraint-Based Framework for Ethical Reasoning
1359

following three subcases: (A) they are totally or-
dered, e.g., privacy <
H
fairness <
H
performance as
shown in Figure 2(b); (B) two of them are in-
comparable, e.g., privacy <
H
fairness ∧ privacy <
H
performance with incomparable norms fairness and
performance as shown in Figure 2(c), which is de-
noted as privacy <
H
{fairness,performance} below,
and also, e.g., privacy <
H
performance ∧ fairness <
H
performance with incomparable norms privacy and
fairness as shown in Figure 2(d), which is de-
noted as {privacy,fairness} <
H
performance below;
(C) all of them are incomparable with each other
as shown in Figure 2(e), which is denoted as
{privacy,fairness,performance} below.
We first consider subcase (A). In this subcase,
we can determine solutions in the same way as nor-
mal, totally ordered constraint hierarchies, which
is achieved by using lexicographic ordering. Ta-
ble 3 shows this process. In this table, each po-
tential solution is associated with three level-wise
ranks. For example, potential solution hd,u,n,m, pi =
hdata1, recommendation, node1, node1, process1i
has the first rank for privacy, the first rank for
fairness, and the third rank for performance. The
final ranks of the potential solutions are determined
as the “lexicographic ranks” according to the used
order of the norm levels. For example, for or-
der privacy <
H
fairness <
H
performance, potential
solution hd, u, n, m, pi = hdata1, recommendation,
node1, node1, process1i is given the first lexico-
graphic rank since its level-wise ranks 1, 1, and 3 (in
the order of the norm levels) is lexicographically bet-
ter than those of the other potential solutions. Such
potential solutions given the first ranks are finally de-
termined as the solutions to the constraint hierarchy
according to the associated order of the norm lev-
els. Note that different lexicographic ranks can be
obtained for different orders of norm levels.
Finally, we consider subcases (B) and (C). In
these subcases, we determine solutions by using the
notion of partially ordered hierarchies. Table 4
shows this process. In this table, each partially
ordered hierarchy is associated with consistent to-
tally ordered hierarchies. For example, partially or-
dered hierarchy privacy <
H
{fairness,performance}
have two consistent totally ordered hierarchies,
privacy <
H
fairness <
H
performance and privacy <
H
performance <
H
fairness. Solutions to a partially
ordered hierarchies are obtained by collecting the
solutions to all the consistent totally ordered hi-
erarchies. For example, partially ordered hierar-
chy privacy <
H
{fairness,performance} has only one
solution hd, u, n, m, pi = hdata1, recommendation,
node1, node1, process1i since it is only the solution
to both of its consistent totally ordered hierarchies.
Note that different solutions can be obtained for dif-
ferent partially ordered hierarchies. Also, note that
subcase (C) (shown in Figure 2(e)) obtained the dif-
ferent solution set (with two solutions) from that of
the simplest case (shown in Figure 2(a)) of having all
the six norms in one level (with only one solution).
6 DISCUSSION
In our framework, we treated only norm constraints at
preferential levels of constraint hierarchies. However,
we can modify our framework to allow other kinds of
constraints at preferential levels. This can be realized
by separating different kinds of constraints into dif-
ferent levels, as already suggested for the purpose of
user interface applications (Hosobe et al., 1994). For
example, we can use ordinary constraints at stronger
levels and norm constraints at weaker levels.
We did not present a concrete algorithm for solv-
ing constraint hierarchies based on our framework.
For this purpose, we think that an SMT- or SAT-
based approach will be promising. In this approach,
a constraint hierarchy is first encoded as an SMT
or SAT problem and then is solved by an external
SMT or SAT solver. Especially, the hill climbing
method (Hosobe and Satoh, 2022) is plausible be-
cause it is simple and applicable to various constraint
hierarchies. Also, it might be possible to use binary
search-based methods (Hosobe and Satoh, 2023) to
construct a more efficient algorithm although it will
be more difficult and challenging.
7 CONCLUSIONS AND FUTURE
WORK
In this paper, we proposed a soft constraint-based
framework for ethical reasoning. By devising the no-
tion of norm constraints, we integrated Taheri et al.’s
ethical decision making framework into Borning et
al.’s constraint hierarchy framework. We also pre-
sented a case study on the application of our frame-
work to ethical reasoning.
Our future work includes the development of a
constraint solver based on our framework. Another
direction is to integrate our framework into hierarchi-
cal constraint logic programming (Wilson and Born-
ing, 1993) to enable more expressive modeling of eth-
ical reasoning problems. It is also necessary to evalu-
ate the usefulness of our framework by applying it to
more practical problems.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
1360
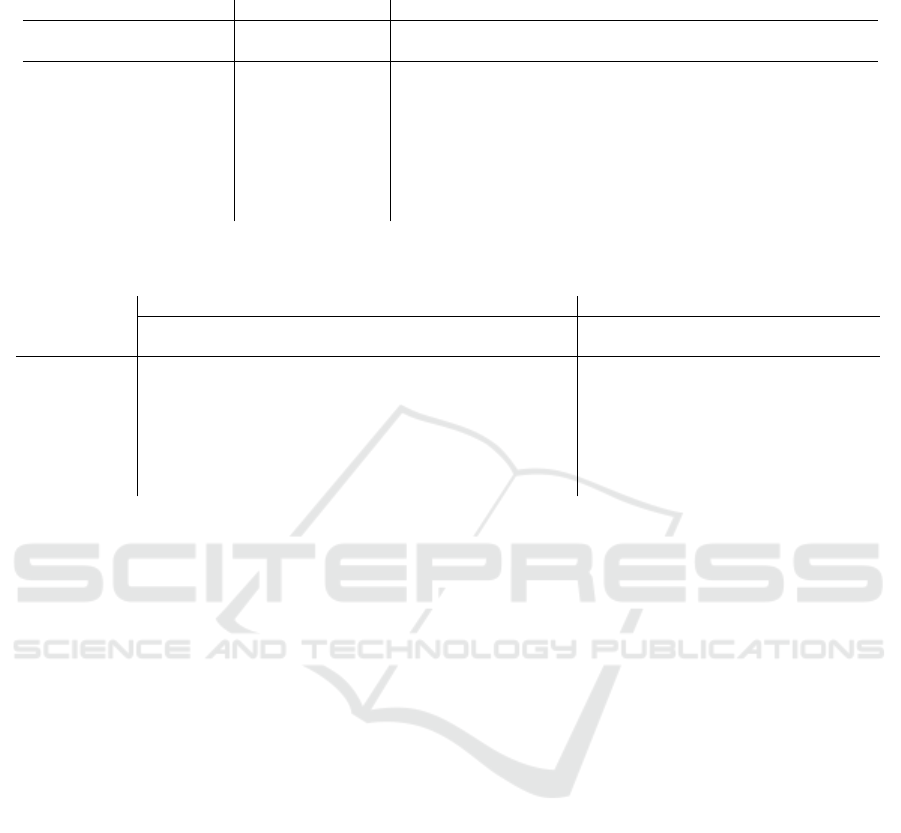
Table 3: Subcase (A) where the three norm levels are totally ordered. Levels privacy, fairness, and performance are abbrevi-
ated as pv, fr, and pf respectively, and the variable values are abbreviated in the same way as in Table 1.
Potential solution Level-wise ranks Lexicographic ranks
pv <
H
fr pv <
H
pf fr <
H
pv fr <
H
pf pf <
H
pv pf <
H
fr
hd, u, n, m, pi pv fr pf <
H
pf <
H
fr <
H
pf <
H
pv <
H
fr <
H
pv
hd1, rec, n1, n1, p1i 1 1 3 1 1 1 3 5 5
hd1, rec, n1, n2, p1i 2 1 2 3 3 2 2 3 3
hd1, rec, n2, n1, p1i 2 1 2 3 3 2 2 3 3
hd1, rec, n2, n2, p1i 3 1 1 5 5 3 1 1 1
hd1, rec, n1, n1, p2i 1 2 3 2 2 4 6 6 6
hd1, rec, n1, n2, p2i 2 2 2 4 4 5 5 4 4
hd1, rec, n2, n1, p2i 2 2 2 4 4 5 5 4 4
hd1, rec, n2, n2, p2i 3 2 1 6 6 6 4 2 2
Table 4: Subcase (B) where two of the three norm levels are incomparable, and subcase (C) where the three levels are
incomparable with each other. The norms and the variable values are abbreviated in the same way as in Table 3.
Partially Consistent totally ordered hierarchies Solutions
ordered pv<
H
fr pv<
H
pf fr<
H
pv fr<
H
pf pf<
H
pv pf<
H
fr
hierarchy <
H
pf <
H
fr <
H
pf <
H
pv <
H
fr <
H
pv hd, u,n,m, pi
pv <
H
{fr,pf} X X hd1,rec,n1,n1, p1i
{pv,fr} <
H
pf X X hd1,rec,n1,n1, p1i
{pv,pf} <
H
fr X X hd1, rec,n1,n1,p1i, hd1,rec,n2,n2,p1i
fr <
H
{pv,pf} X X hd1,rec,n1,n1, p1i,hd1,rec,n2, n2,p1i
{fr,pf} <
H
pv X X hd1,rec,n2,n2, p1i
pf <
H
{pv,fr} X X hd1,rec,n2,n2, p1i
{pv,fr, pf} X X X X X X hd1,rec,n1,n1, p1i,hd1,rec,n2, n2,p1i
ACKNOWLEDGEMENT
This work was supported by JST AIP Trilateral AI
Research Grant Number JPMJCR20G4.
REFERENCES
Borning, A., Freeman-Benson, B., and Wilson, M. (1992).
Constraint hierarchies. Lisp Symbolic Comput.,
5(3):223–270.
Chiu, C. K. and Lee, J. H. M. (1998). Extending HCLP
with partially ordered hierarchies and composite con-
straints. J. Expt. Theor. Artif. Intell., 10:5–24.
Eshghi, K. (1988). Abductive planning with event calculus.
In Proc. JICSLP, pages 562–579.
Fungwacharakorn, W., Tsushima, K., and Satoh, K.
(2022a). Debugging constraint hierarchies represent-
ing ethical norms with valuation preferences. In Proc.
Workshop on AI Compliance Mechanism (WAICOM),
pages 114–124.
Fungwacharakorn, W., Tsushima, K., and Satoh, K.
(2022b). Fundamental revisions on constraint hierar-
chies for ethical norms. In Proc. JURIX, volume 362
of FAIA, pages 182–187.
Hayashi, H., Mitsikas, T., Taheri, Y., Tsushima, K.,
Sch
¨
afermeier, R., Bourgne, G., Ganascia, J.-G.,
Paschke, A., and Satoh, K. (2023). Multi-agent on-
line planning architecture for real-time compliance. In
RuleML+RR Companion, volume 3485 of CEUR WS.
Hosobe, H., Miyashita, K., Takahashi, S., Matsuoka, S.,
and Yonezawa, A. (1994). Locally simultaneous con-
straint satisfaction. In Proc. PPCP Workshop, volume
874 of LNCS, pages 51–62.
Hosobe, H. and Satoh, K. (2022). Solving constraint hier-
archies for hierarchical constraint logic programming.
In Proc. JSAI Conf., number 4F3-OS-8b-04, pages 1–
4. In Japanese.
Hosobe, H. and Satoh, K. (2023). Binary search-based
methods for solving constraint hierarchies over finite
domains. In Proc. IEEE ICTAI, pages 186–193.
Saari, D. G. and Merlin, V. R. (1996). The Copeland
method—I.: Relationships and the dictionary. Econ.
Theory, 8:51–76.
Satoh, K., Asai, K., Kogawa, T., Kubota, M., Nakamura,
M., Nishigai, Y., Shirakawa, K., and Takano, C.
(2010). PROLEG: An implementation of the pre-
supposed ultimate fact theory of Japanese civil code
by PROLOG technology. In Proc. JSAI-isAI, volume
6797 of LNCS, pages 153–164.
Satoh, K., Ganascia, J.-G., Bourgne, G., and Paschke, A.
(2021). Overview of RECOMP project. In Proc.
Workshop on Computational Machine Ethics (CME).
Taheri, Y., Bourgne, G., and Ganascia, J.-G. (2023).
Modelling integration of responsible AI values
for ethical decision making. In Proc. Work-
shop on Computational Machine Ethics (CME).
https://github.com/yousef-taheri/responsibleAi.
Wilson, M. and Borning, A. (1993). Hierarchical constraint
logic programming. J. Log. Program., 16(3–4):227–
318.
A Soft Constraint-Based Framework for Ethical Reasoning
1361
