
An Investigation of Distributed Constraint Optimization with
Non-Responding Agents Toward Real-Time Solution Method on
Practical Messaging Platforms
Toshihiro Matsui
a
Nagoya Institute of Technology, Gokiso-cho Showa-ku Nagoya Aichi 466-8555, Japan
Keywords:
Distributed Constraint Optimization, Message Loss, Publish and Subscribe, Multiagent System.
Abstract:
Distributed constraint optimization problems have been studied as the bases of decentralized resource allo-
cation and decision making on multiagent systems. The studies address constraint optimization problems
distributed on multiple agents and decentralized solution methods. A number of types of solution methods
based on different optimization techniques have been proposed, and various applications have been inves-
tigated, including resource allocation for sensor networks and power grids, and collaboration for meeting
scheduling and disaster responses. One issue with implementation is the low communication quality in some
cases of actual devices. A recent study addressed the delay and loss of messages in local search methods. On
the other hand, opportunities exist for considering further practical implementation techniques. For example,
in real-time systems, a solution process might be required to complete an optimization cycle even if several
agents do not respond temporally. In this paper, we investigate fundamental implementation techniques to-
ward distributed constraint optimization methods on a message-oriented communication platform based on the
publish/subscribe model, which is generally employed for IoT devices and robot systems. In our first study,
we address the deterministic local search method on the low QoS settings of communication environments
with message loss, where the solution method must continue with temporally missing agents. We experimen-
tally evaluate the influence of several approaches to handle temporally non-responding agents in the executing
solution processes.
1 INTRODUCTION
Optimization problems and solution methods on mul-
tiagent systems have been studied as the bases for de-
centralized resource allocation and decision making.
Research on distributed constraint optimization prob-
lems (Yeoh and Yokoo, 2012; Fioretto et al., 2018)
address the constraint optimization problem that is
distributed among multiple agents and decentralized
solution methods. Various applications, including re-
source allocation for sensor networks (Zhang et al.,
2005; Zivan et al., 2009; Matsui, 2020) and power
grids (Kumar et al., 2009; Matsui and Matsuo, 2012)
as well as collaboration for meeting scheduling (Ma-
heswaran et al., 2004b) and disaster response (Ram-
churn et al., 2010), require such a general represen-
tation of problems and distributed solvers as foun-
dations of substantial cooperative problem-solving
methods.
a
https://orcid.org/0000-0001-8557-8167
Various types of solution methods based on dif-
ferent optimization techniques have been proposed.
Such solution methods are categorized into complete
methods to find optimal solutions (Modi et al., 2005;
Petcu and Faltings, 2005; Yeoh et al., 2008) and in-
complete methods for quasi-optimal solutions (Mah-
eswaran et al., 2004a; Pearce et al., 2008; Zhang et al.,
2005; Ottens et al., 2012; Nguyen et al., 2019; Mah-
mud et al., 2020; Choudhury et al., 2020). In particu-
lar, relatively simple local search methods have been
employed for prototyping several applications, since
they are relatively easily adjusted for practical imple-
mentation (Zivan et al., 2009; Fioretto et al., 2017;
Matsui, 2020).
One of implementation issues is the low commu-
nication quality of some actual devices. A recent
study (Rachmut et al., 2022), which addressed the de-
lay and loss of messages in local search methods, de-
scribed frameworks to handle delayed messages and
investigated the influence of delay and loss of mes-
sages in fundamental local search methods.
428
Matsui, T.
An Investigation of Distributed Constraint Optimization with Non-Responding Agents Toward Real-Time Solution Method on Practical Messaging Platforms.
DOI: 10.5220/0012471000003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 1, pages 428-437
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

On the other hand, opportunities also exist for
considering further practical implementation tech-
niques. For example, real-time systems might re-
quire a solution process to complete optimization cy-
cles even if several agents are not responding tempo-
rally. Such agents resemble temporally uncontrolled
agents in the solution process. In different stud-
ies of the class of problems containing uncontrolled
agents, such agents are considered with boundaries
of benefits or risks, and such boundaries are opti-
mized (Rogers et al., 2011; Okimoto et al., 2011;
Rogers et al., 2011; Matsui et al., 2010; Matsui,
2023). This approach can be applied to a solution pro-
cess with temporally missing agents.
In this paper, we investigate fundamental imple-
mentation techniques toward distributed constraint
optimization methods on a message-oriented com-
munication platform based on the publish/subscribe
model that is generally employed for IoT devices
and robot systems. We address a deterministic local
search method on the low QoS settings of a communi-
cation environment with message loss, where the so-
lution method must continue with temporally miss-
ing agents. We employ a minimal environment that
simulates such communication settings and investi-
gate several approaches to handle temporally non-
responding agents for executing solution processes.
We also experimentally evaluate the influence of our
proposed approach.
The rest of this paper is organized as follows.
Next, we present the background of our study, in-
cluding distributed constraint optimization problems,
a publish/subscribe communication model with low
QoS settings, a related work of local search methods
with incomplete messaging, related works on uncon-
trollable agents, and the aim of this study. In Sec-
tion 3, we present our proposed methods and con-
sider the basic implementation of solution methods as
well as several approaches to handle temporally non-
responding agents in executing solution methods. We
experimentally investigate these approaches in Sec-
tion 4 and conclude in Section 5.
2 PRELIMINARIES
2.1 Distributed Constraint
Optimization Problem
A distributed constraint optimization problem
(DCOP) (Yeoh and Yokoo, 2012; Fioretto et al.,
2018) is a fundamental combinatorial optimization
problem in multiagent systems. It is defined by
hA, X, D, Fi, where
• A is a set of agents,
• X is a set of discrete variables,
• D is a set of domains of the variables, and
• F is a set of functions that represent the evaluation
values of the constraints
1
.
In general settings, variable x
k
∈ X takes a value
from corresponding domain D
k
∈ D, and function
f
k
∈ F defines non-negative evaluation values f
k
(X
k
)
s.t. X
k
∈ X for assignments to the variables in X
k
.
The globally optimal assignment to all the variables
maximizes the total evaluation value aggregated for
all functions. Agent a
i
∈ A has its own set of vari-
ables X
i
∈ X that represents the decision or state of
the agent, and a
i
determines the assignment to its own
variables in X
i
. Each function represents the relation-
ship among neighborhood agents who have variables
related to the function. Each agent a
i
knows the in-
formation of its variables X
i
, the functions in F
i
∈ F
related to the variables, and the neighborhood agents’
variables related to functions in F
i
. N
i
denotes the set
of a
i
’s neighborhood agents.
As a standard setting without loss of generality,
we focus on a simple case where agent a
i
has a single
variable x
i
, and all the functions are binary functions
f
j,k
: D
j
× D
k
→ N
0
. f
j,k
is denoted by f
j,k
(d
j
, d
k
).
This problem can be depicted using a constraint graph
where the nodes and edges represent agents/variables
and functions. Here globally optimal solution A
∗
is
represented as A
∗
= arg max
A
∑
f
i, j
∈F
f
i, j
(A
↓x
i
, A
↓x
j
).
Agents search for the optimal assignment to their
own variables in a decentralized manner with their re-
lated agents.
The solution methods for DCOPs (Fioretto et al.,
2018) are categorized into complete methods (Modi
et al., 2005; Petcu and Faltings, 2005; Yeoh et al.,
2008) for optimal solutions and incomplete meth-
ods (Maheswaran et al., 2004a; Pearce et al., 2008;
Zhang et al., 2005; Ottens et al., 2012; Nguyen et al.,
2019; Mahmud et al., 2020; Choudhury et al., 2020)
for quasi-optimal solutions. Since complete methods
cannot be applied to densely constrained large-scale
problems without approximation, incomplete solution
methods have been developed. Although various so-
phisticated solution methods can be found, simple lo-
cal search methods, where each agent exchanges its
information with neighborhood agents, is practical in
1
We note that DCOP has been derived from the dis-
tributed constraint satisfaction problem (Yokoo et al., 1998)
to handle soft constraints, and in a fundamental definition,
hard constraints are implicitly represented with special ob-
jective values such as −∞/∞ for maximization/minimiza-
tion problem.
An Investigation of Distributed Constraint Optimization with Non-Responding Agents Toward Real-Time Solution Method on Practical
Messaging Platforms
429

the first step modeling prototypes of application sys-
tems (Zivan et al., 2009; Fioretto et al., 2017; Matsui,
2020). We focus on a fundamental local search algo-
rithm (Maheswaran et al., 2004a; Pearce et al., 2008)
for a case study toward an implementation of solution
methods in a practical communication platform with
message loss.
2.2 Publish/Subscribe Communication
Model and Message Loss
Publish/subscribe (pub/sub) models are employed in
message oriented communication platforms, includ-
ing MQTT
2
for IoT devices and DDS
3
in ROS2 for
robots. Communication systems consist of the fol-
lowing elements.
• Publisher: distributes messages to a communica-
tion system without an awareness of the receivers.
• Subscriber: receives related messages from a
communication system.
• Broker: transfers messages to subscribers. Sev-
eral systems have no explicit brokers and deploy
multi-cast communication.
We consider a pub/sub model with topics, where a
publisher sends messages on specific topics, and sub-
scribers sign up for messages related to required top-
ics. The quality-of-service (QoS) of communication
levels is generally defined in practical pub/sub mod-
els. Communication without message loss is assured
with high QoS levels, although it requires relatively
high communication overhead. On the other hand, a
low QoS might cause message loss in exchange for re-
duced communication overhead. We assume a simple
system without brokers and a low QoS for real-time
situations.
2.3 Local Search Methods and
Communication Quality Settings
We focus on a fundamental local search algorithm:
maximum gain messages (MGM) (Maheswaran et al.,
2004a; Pearce et al., 2008). Here neighborhood
agents repeat synchronous communication steps with
each other after sharing their initial solutions (lines
1 and 2 in Figure 1). First, each agent a
i
locally
searches for the best assignment to its own variable
x
i
under its view of the partial assignments received
from its neighborhood agents in N
i
, computes the gain
2
MQTT: The Standard for IoT Messaging (https://mqtt.
org/)
3
ROS on DDS (https://design.ros2.org/articles/ros on
dds.html)
1 SendValueMessage(N
i
, x
i
)
2 currentContext = GetValueMessages(N
i
)
3 [gain,newValue] = BestUnilateralGain(currentContext)
4 SendGainMessage(N
i
, gain)
5 neighborGains = ReceiveGainMessages(N
i
)
6 if gain > max(neighborGains) then
7 x
i
= newValue
Figure 1: MGM (Pearce et al., 2008) in each agent a
i
.
of the locally aggregated function values for the view
(line 3), and multi-casts the gain to the neighborhood
agents (line 4). Each agent receives the gain values
from all of the neighborhood agents (line 5). If its
gain is largest among its neighborhood agents (line 6),
the agent commits to its new assignment (line 7), and
multi-casts the update to its neighborhood agents (line
1). A tie of gains is broken using the names of agents
(line 6). The process monotonically updates global
evaluation values and corresponding solutions, and it
converges into a one-optimal solution. This process
is also an anytime algorithm. Although this is the
simplest solution method for DCOPs, various studies
have employed it for fundamental analyses and proto-
types of application systems. We also use this method
for our first case study toward the implementation of
solution methods in a practical communication plat-
form with message loss.
There are several studies of solution methods
for DCOPs with incomplete communication environ-
ments (Rachmut et al., 2022). A recent study (Rach-
mut et al., 2022) investigated the influence of mes-
sage delay and loss for local search algorithms. It
presented frameworks for local search methods with
logical time stamps or contexts to handle message de-
lays, while it is assumed that message loss can be
mitigated by resending messages. Another investiga-
tion adjusted local search methods, including MGM
and distributed stochastic algorithm (DSA), to handle
message loss with an asynchronous process and ex-
perimentally concluded that the perturbation caused
by message loss might improve the search path and
the resulting solution quality. This study mainly ad-
dresses an asynchronous approach to handle message
delay and considers message loss that is handled with
asynchrony and resending. On the other hand, in real-
time situations, there might be opportunities to tem-
porally ignore non-responding agents, a situation that
forces solution methods to be continued.
2.4 DCOPs with Uncontrollable Agents
There are several studies of DCOPs with uncon-
trollable agents. A basic case is the approxima-
tion of densely constrained problems, where several
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
430

functions are replaced by low arity ones (Rogers
et al., 2011; Okimoto et al., 2011). In a previous
work (Rogers et al., 2011), the functions are approx-
imated so that the graph structure representing the
original problem is modified to a spanning tree by
eliminating several edges. Here the impact of the
edges is considered, and functions can be modified
by aggregating the boundaries of the evaluation val-
ues for the eliminated edges.
For an extended class of problems with adversarial
agents that might decrease the global solution qual-
ity, non-adversarial agents cooperatively optimize so-
lutions assuming that the adversarial agents choose
the worst case solution (Matsui et al., 2010; Matsui,
2023). The worst cases can also be approximated with
the boundaries of the evaluation values for adversarial
agents to optimize the problems based on worst case
values.
Although the risks or expectation of uncontrolled
agents are generally considered in the problem set-
tings themselves with robustness or resilience, there
might be opportunities to apply them to solution
processes for real-time systems with non-responding
agents.
2.5 Aim of Study
We are investigating the implementation techniques
of solution methods on practical communication plat-
forms based on pub/sub models. That includes sev-
eral detailed tunings of message communication tim-
ings and synchronization logics. Particularly in low
QoS settings that can be employed with mobile robots
with wireless multi-cast communication, the situa-
tions where some publisher agents might be tempo-
rally missing due to collisions or obstacles on the
communication systems. In real-time systems, a solu-
tion process might be required to continue its execu-
tion by ignoring such missing agents.
In this situation, a possible approach is to eval-
uate such missing agents as uncontrolled ones. We
investigate the effect of this approach. As our first
case study, we address the simplest deterministic lo-
cal search method; we will address complicated cases
with additional communication steps in a future study.
3 LOCAL SEARCH WITH
MISSING AGENTS
3.1 Modeling Communication Platform
We are motivated to develop frameworks and im-
plementation techniques for solution methods for
DCOPs on practical communication platforms based
on pub/sub models. Although a practical implemen-
tation must contain the input of sensing data, the ini-
tialization and execution of a solution method, and
the output to an environment, we first study a so-
lution method that is adjusted to a communication
model. As preparation, we build a minimal simula-
tion environment and investigate the solution meth-
ods. We assume that agents have the information
about their neighborhood agents related to their com-
mon evaluation functions. Such information might be
provided by employing additional services to register
it. Each agent publishes messages and subscribes to
them from its neighborhood agents. Although a typ-
ical implementation of IoT devices and cloud servers
employs centralized processing that collects informa-
tion from edge devices and gives commands to such
devices, we focus on cooperative problem solving by
edge devices.
Several solution methods for DCOPs are based on
a communication system with message queuing. To
adjust such methods to the pub/sub model, some man-
agement of communication that resembles distributed
shared memories is necessary. To reduce the process-
ing and communication loads, relatively light and in-
complete solution methods are practical. Particularly
in the case of low QoS communication systems, ro-
bustness for message loss is required. We focus on
these points and investigate related issues. We ad-
dress a simple setting where each published multi-cast
message in each time step is either transferred or lost;
delayed or corrupted messages are ignored.
3.2 Implementation of Fundamental
Local Search Method
We implement a deterministic local search that is
based on MGM. After a first step to share the ini-
tial solution, the solution process repeats its phases.
Each phase of an agent consists of the computation of
information to be published, publishing that informa-
tion, and collecting subscribing information from all
of the neighborhood agents. The phases are integrated
using a barrier synchronization by received messages,
while no agent knows whether its published messages
have been transferred.
Each agent has a view, which is a cache of the
information from each neighborhood agent. When
a subscribing message is received, its corresponding
information is updated. A view for a neighborhood
agent consists of the following kinds of information.
• The current iteration of the solution process in the
neighborhood agent.
An Investigation of Distributed Constraint Optimization with Non-Responding Agents Toward Real-Time Solution Method on Practical
Messaging Platforms
431

• The current phase in the current iteration of the
solution process in the neighborhood agent.
• The current assignment to the neighborhood
agent’s variable.
• The current gain of the local evaluation in the
neighborhood agent.
Each message also consists of similar information,
and the assignment or gain value is exclusively car-
ried depending on the corresponding phase value.
When a message is received, a pair of logical time
stamps for iterations and phases is checked with those
of the subscriber agents. If a pair of iteration and
phase matches the information in a view, the infor-
mation is updated with the message. Otherwise the
message is ignored.
The followings are the detailed phases in each it-
eration.
1. Initialization of solution: Each agent a
i
randomly
selects an assignment to its own variable x
i
and
publishes the assignment. After the subscribing
messages for the current iteration and phase are
received from all the neighborhood agents in N
i
,
a
i
moves to the next phase.
2. Evaluation of local gain: Each agent a
i
locally
searches for the best solution under the partial so-
lution in its current view, and evaluates the gain
of the evaluation value aggregated for its related
evaluation function. The gain is published. After
the subscribing messages for the current iteration
and phase are received from all the neighborhood
agents, a
i
moves on to the next phase.
3. Commitment of the best assignments: Each agent
checks whether it is the winning agent whose gain
exceeds that of any other agents in the current
view received from the neighborhood agents. The
winning agent updates its best assignment to its
own variable x
i
. Then the current assignment to x
i
is published. Although the information of the un-
changed assignments is redundant, we prefer that
all agents publish their current assignment for a
simple handshake among agents and for room to
adjust the solution process. After the subscrib-
ing messages for the current iteration and the cur-
rent phase are received from all the neighborhood
agents, a
i
moves to the next iteration and the sec-
ond gain evaluation phase, skipping the first initial
solution phase.
We separately implement the computation, publish-
ing, and subscribing steps in each phase as callback
procedures that are repeatedly executed by the whole
system. The computation, publishing and subscrib-
ing steps can be repeatedly called in different frequen-
cies, and barrier synchronization, which is waiting for
all the messages from the neighborhood agents, is ap-
plied to the end of each phase.
3.3 Resending Messages
In an environment with message loss, resending the
same message is the basic approach. To simulate this
situation, the callback for publishing and subscribing
can be frequently called than that for the computation
of the solution process. However, since we address
a real-time system, re-publishing messages are lim-
ited up to the maximum times of retries. When some
subscribing messages are not received, a barrier syn-
chronization at each phase cannot be achieved, and
the solution process in such an agent gets stuck. On
the other hand, an agent that received messages from
all the neighborhood agents might move to the next
phase. Due to such situations the solution process
of the entire system does not consistently progress.
To avoid such situations, sufficient re-publishing at-
tempts are required.
3.4 Default Values Aggregated from
Agent Views
The information in the view of each agent should
represent inconsistent situations due to missing mes-
sages. The information of each agent’s view is ini-
tially empty and default values are set. We set the
default values of iteration and phase to common ini-
tial values, which are incrementally updated with re-
ceived messages. For the default assignment to each
variable, we use an empty value, which also rep-
resents the situation of non-responding agents. We
also use an empty value for the default gain value.
When the default gain value is used to represent non-
responding agent, it can be used to exclude missing
agents from the comparison of gain values.
If the solution process only considers the current
information, the old information in the views with the
old pairs of iteration and phase values should be ig-
nored. In an exception case for MGM, the assign-
ment of the agent that does not commit its new best
assignment is still valid, and some peers can observe
this situation without any subsequent communication.
For such cases, old assignments can be inherited as
a backup for a missing (but substantially redundant)
subsequent message.
3.5 Excluding Agents with Message
Loss
When a message from a neighboring agent is lost,
other neighborhood agents ignore the agent and con-
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
432

tinue their solution process to avoid a lock of system.
Each agent a
i
ignores a neighborhood agent after a
threshold number of subscription-retries, and the ig-
nored agent is marked and excluded from the cooper-
ation in a
i
. Here the ignored agent itself is not aware
this situation due to the communication system’s set-
tings.
Each agent, who is ignoring the missing neigh-
borhood agents, continues the process by collecting
available information from the other neighborhood
agents. In this case, part of the information is missing
in an agent’s view for the current iteration and phase.
In the phase of the local gain evaluation, each agent
evaluates the partial solution, including the missing
assignment. We investigate the following approaches.
• Inherit: Each agent keeps its view for the last re-
ceived assignment and employs it by ignoring the
consistency of its related iteration and phase. This
can be considered a natural adaption of MGM to
the situation.
• LB: For an assignment of missing neighbor-
hood agent a
j
and the own assignment of a
i
,
the lower bound values of the related evaluation
function f
i, j
(d
i
, d
j
) are employed by approximat-
ing the binary functions to the unary function
f
i
(d
i
) = min
d
j
f
i, j
(d
i
, d
j
). Such agent a
i
performs
a maximin optimization, which is a relatively pes-
simistic approach.
• UB: It resembles an LB, although the upper bound
values of the evaluation functions are employed.
This is a relatively greedy approach.
In a basic setting that emphasizes the situation of
the missing agents, once an agent ignores a neighbor-
hood agent a
j
, it does not trust the communication
quality of a
j
and continues to ignore a
j
.
3.6 Accepting Committed Solutions
from Ignored Agents
The previous section introduced ignored agents to
continue the solution process by admitting the miss-
ing agents. When a new message is received from an
ignored agent, such a message might be based on dif-
ferent information.
On the other hand, the committed/current assign-
ment to the neighborhood agents’ variables improves
the accuracy of the evaluation values in the local
search even if the agents are still ignored and excluded
from cooperation. We investigate the robustness in
this partially corrupted solution process.
3.7 Rejoin to Cooperation
Ignored agents can return to the solution process at an
appropriate timing. For simplicity, we assume a re-
covery is tried at a commitment phase that can be a
reset timing of an agents’ view. When an agent a
i
re-
ceives a commitment message from its ignored agent,
it checks whether the iteration and phase pair in the
message is consistent with that in a
i
. If that is con-
sistent, the subscriber agent accepts the message, up-
dates its related view, and removes the publisher agent
from its list of ignored agents. The timestamps of the
iteration and phase are not related to the context of the
assignment of variables, and a publisher agent simply
rejoins without other conditions.
When an agent observes that its current time
stamp is older than those of the other agents, the de-
laying agent can update its time stamp to the newest
one by locally adjusting its solution process, and it
can catch up with the other agents. Actually in our
experiments, since the agents separately update their
phases almost at the same interval, we mainly focus
on the influence of the message loss. Our future work
will investigate such delays.
4 EVALUATION
4.1 Settings
We experimentally evaluated our proposed approach.
The following typical settings were selected from
our various preliminary experiments. The benchmark
problems consist of 50 agents/variables and randomly
generated c binary constraints/functions. Each vari-
able takes a value from its domain whose size is three.
We employed the following types of evaluation
functions.
• MATCHING: A function value is set by random
integer values in [1, 10] based on uniform distribu-
tion for the same assignment to a pair of variables,
while it takes zero for different assignments.
• RANDOM: The function values are set by ran-
dom integer values in [1, 10] based on uniform dis-
tribution.
Intuitively, MATCHING resembles a weighted vertex
coloring problem for minimization problems, but it is
solved as a maximization problem. We employed this
problem setting to show a result different from other
cases. We confirmed that the result of vertex coloring
problems with random weight values for maximiza-
tion problems resembled that of RANDOM.
An Investigation of Distributed Constraint Optimization with Non-Responding Agents Toward Real-Time Solution Method on Practical
Messaging Platforms
433
Table 1: Result without message loss (BASE).
prb. c utility last update
#iter. #sys. cyc.
MATCHING 49 272.5 2.1 12.0
100 497.4 5.0 23.6
150 795.5 8.1 35.8
RANDOM 49 404.2 2.7 14.8
100 743.4 4.4 21.6
150 1072.7 6.1 28.3
We evaluated the following settings of the solution
methods.
• BASE: a baseline method that does not consider
message loss.
• IGNORE: a method that continues to ignore the
neighborhood agents with message loss, even if
the agents can communicate after that.
• RCVCMT: In addition to IGNORE, commitment
messages from ignored agents are accepted.
• REJOIN: In addition to RCVCMT, commitment
messages are treated as the rejoin to cooperation.
We compared the evaluation approaches for miss-
ing assignments (shown in Section 3.5), and com-
bined them with the default assignment values in the
agent’s views (discussed in Section 3.4) as follows.
• Inherit: The initial assignments in the agents’
views were shared by a simulator by assuming an
additional mechanism, and the initialization phase
was skipped.
• LB, UB: Each agent a
i
resets the assignments in
its view for the neighborhood agents who have
larger gain values than a
i
, because such neighbor-
hood agents must report whether they update their
assignment by commitment messages.
We investigated several settings of communica-
tion environments that emphasize specific situations:
• The frequency of callbacks for computation, pub-
lishing, and subscribing steps in each phase.
• The number of agents with low communication
quality and their message missing rates.
• The threshold number of subscribing retries be-
fore ignoring the missing agents.
The simulation was terminated at 100 system cy-
cle to focus on the convergence of solution quality in
early steps. We evaluated the quality of the final so-
lution and the last iteration of the solution updates in
the entire system. Each result was averaged over ten
problem instances and ten trials with different random
initial solutions.
Table 2: Convergence of solution for ratio of publishing
steps per computation step (BASE, RANDOM, one low-
communication-quality agent with message loss rate 0.5).
c #pub. / #iter. utility last update
#iter. #sys. cyc.
49 1 374.3 1.9 11.5
5 400.6 2.6 71.8
10 392.5 1 80
100 1 609.8 0.2 4.9
5 719.0 3.0 79.4
10 693.8 1 80
150 1 855.9 0.0 3.6
5 1021.1 3.0 79.8
10 977.1 1 80
4.2 Results
Table 1 shows the baseline result without any mes-
sage loss. Here #iter is the number of iterations in the
solution methods, and “#sys. cyc.” is the number of
system cycles in the simulator that executes the call-
back procedures of a solution method. The presented
values are those in the last solution update. We set
parameters so that each callback procedure of the so-
lution methods is called once in each system cycle.
Table 2 shows the convergence of the solution for
each ratio of publishing callbacks per computation
callback in the baseline method. Here the message
loss rate was set to 0.5 for one agent to emphasize the
message loss. With a larger number of publishing re-
tries, the iteration increased in average, and it reveals
that the stuck situations decreased. In addition, there
is a trade-off between the retry and the progress of
solution process. However, such retry settings are ex-
perimental and agents became got stuck cannot con-
tinue their solution process.
Table 3 shows the result of a case of ignored
agents due to message loss. Here the message loss
rate was set to 0.5 for 25 agents. The same frequency
was set for the computation, publishing and, subscrib-
ing callback procedures of the solution method. The
threshold of publishing retries before a missing agent
was ignored was set to once. “#ignored nbr. at last”
is the number of neighborhood agents that were ig-
nored by each agent in the cutoff system cycle. Al-
though the solution method continued, the quality of
the solutions decreased more than the baseline result
in Table 1.
Regarding the evaluation approaches for missing
assignments to the variables in the agents’ views,
UB that maximizes the best case found slightly bet-
ter solutions than others in the cases of (MATCH-
ING, c = 49 and c = 100) and RANDOM in average.
This can be considered that each evaluation function
is symmetric, and agents’ local gains are not so op-
posed. In the cases of (MATCHING, 150), the result
of LB was better. We note that LB is also competi-
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
434
Table 3: Result with ignored agents(IGNORE, 25 low-communication-quality agents with message loss rate 0.5).
prb. c lcl. eval. utility last update #ignored. nbr. at last
#iter. #sys. cyc min. ave. max
MATCHING 49 Inherit 231.3 1.5 7.6 0 1.0 3.5
LB 243.2 1.8 11.2 ” ” ”
UB 256.7 1.9 11.4 ” ” ”
100 Inherit 414.6 2.9 13.5 0 2.0 5.5
LB 424.2 2.8 15.3 ” ” ”
UB 424.3 3.0 15.9 ” ” ”
150 Inherit 614.4 3.6 16.2 0.3 3.0 7.1
LB 653.7 3.5 18.0 ” ” ”
UB 612.2 3.7 18.9 ” ” ”
RANDOM 49 Inherit 380.9 1.9 9.5 0 1.0 3.5
LB 378.1 2.1 12.5 ” ” ”
UB 396.7 2.1 12.4 ” ” ”
100 Inherit 705.6 3.1 14.2 0 2.0 5.5
LB 708.2 3.1 16.4 ” ” ”
UB 721.9 3.2 16.9 ” ” ”
150 Inherit 1022.8 3.8 17.4 0.3 3.0 7.1
LB 1020.7 3.8 19.2 ” ” ”
UB 1041.4 4.1 20.4 ” ” ”
Table 4: Result with ignored agents(RCVCMT, 25 low-communication-quality agents with message loss rate 0.5).
prb. c lcl. eval. utility last update #ignored. nbr. at last
#iter. #sys. cyc min. ave. max
MATCHING 49 Inherit 270.6 3.9 17.4 0 1.0 3.5
LB 267.0 22.3 93.2 ” ” ”
UB 278.5 23.8 99.4 ” ” ”
100 Inherit 503.9 7.7 32.6 0 2.0 5.5
LB 528.0 21.6 90.3 ” ” ”
UB 510.3 23.8 99.0 ” ” ”
150 Inherit 783.4 9.0 37.8 0.3 3.0 7.1
LB 818.4 16.7 70.8 ” ” ”
UB 801.7 22.5 94 ” ” ”
RANDOM 49 Inherit 403.7 4.2 18.9 0 1.0 3.5
LB 399.2 23.9 99.7 ” ” ”
UB 407.9 23.8 99.3 ” ” ”
100 Inherit 745.2 6.1 26.2 0 2.0 5.5
LB 737.9 24.0 99.96 ” ” ”
UB 744.4 23.9 99.7 ” ” ”
150 Inherit 1073.2 7.6 32.2 0.3 3.0 7.1
LB 1066.8 24 100 ” ” ”
UB 1075.4 24.0 99.9 ” ” ”
Table 5: Result with ignored agents(REJOIN, 25 low-communication-quality agents with message loss rate 0.5).
prb. c lcl. eval. utility last update #ignored. nbr. at last
#iter. #sys. cyc min. ave. max
MATCHING 49 Inherit 271.1 4.0 17.6 0 0.5 2.5
LB 267.1 21.9 91.8 ” 0.8 3.0
UB 279.3 23.9 99.4 ” ” ”
100 Inherit 503.3 8.0 33.6 0 1.0 3.7
LB 529.8 21.2 88.8 ” 1.6 4.6
UB 513.8 23.8 99 ” ” ”
150 Inherit 783.8 9.1 38 0 1.5 4.6
LB 817.1 17.0 72 0.05 2.3 5.9
UB 803.7 22.5 94.0 ” ” ”
RANDOM 49 Inherit 403.8 4.5 20.2 0 0.5 2.5
LB 399.7 24.0 99.8 ” 0.8 3.0
UB 408.7 23.8 99.2 ” ” ”
100 Inherit 744.5 6.2 26.7 0 1.0 3.7
LB 738.2 24 100 ” 1.6 4.6
UB 745.5 23.8 99.3 ” ” ”
150 Inherit 1073.7 8.0 33.8 0 1.5 4.6
LB 1067.9 24.0 99.9 0.05 2.3 5.9
UB 1075.9 24.0 99.96 ” ” ”
tive with UB in the case of (MATCHING, 100). For
MATCHING, LB substantially ignore the evaluation
values as zero for missing agents and does not expect
the values of them. If the local gains of agents are
more asymmetric, LB might be better, while we tuned
settings within symmetric DCOPs in this study.
An Investigation of Distributed Constraint Optimization with Non-Responding Agents Toward Real-Time Solution Method on Practical
Messaging Platforms
435
800
850
900
950
1000
1050
1100
0 20 40 60 80 100
sys. cyc.
IGNORE
RCVCMT
REJOIN
BASE
(a) Solution quality
0
2
4
6
8
10
0 20 40 60 80 100
sys. cyc.
min. ave. max.
(b) #ignored agt. (IGNORE/RCVCMT)
0
2
4
6
8
10
0 20 40 60 80 100
sys. cyc.
min. ave. max.
(c) #ignored agt. (REJOIN)
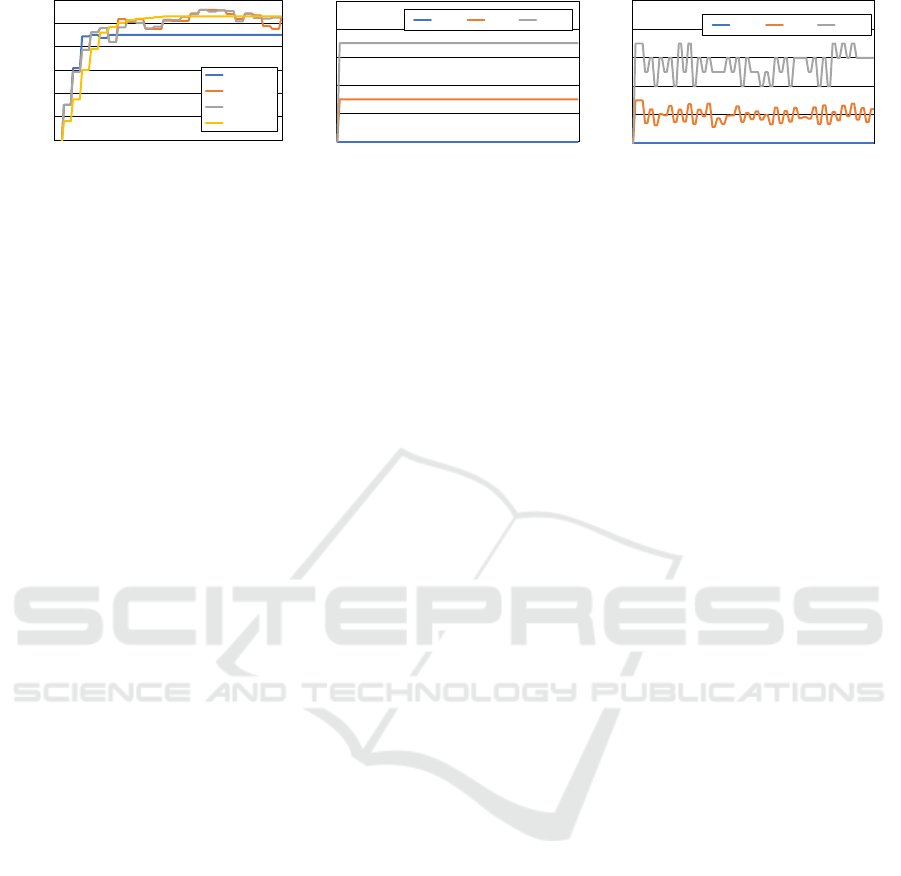
Figure 2: Anytime curve of an instance (RANDOM, c = 150, UB, 25 low-communication-quality agents with message loss
rate 0.5).
Table 4 shows the results of the cases that always
accepted commit messages, and Table 5 shows the
cases that allowed cooperation to be rejoined. With
the (partial) recovery of coordination, the progress
of solution processes was increased. From the com-
parison of the cases of RCVMT and REJOIN, the
sharing of agents’ states seemed to sufficiently prop-
agate information particularly in the simple local
search method. In comparison to Table 1, the per-
turbation due to incomplete messaging increased the
search neighborhood in a solution space and im-
proved the solution quality, as pointed out in the pre-
vious study (Rachmut et al., 2022).
Figure 2 shows a set of anytime curves for an
instance. As shown in Figure 2 (a), the solution
quality monotonically increased in IGNORE, while
RCVCMT and REJOIN were unstable due to the ad-
ditional communication. On the other hand, the latter
two methods obtained relatively higher quality of so-
lutions in later steps, and those were competitive with
BASE in average. Regarding the comparison of Fig-
ures 2 (b) and (c), REJOIN reduced the number of
ignored agents in average.
5 CONCLUSION
We investigated fundamental implementation tech-
niques toward distributed constraint optimization
methods on a message-oriented communication plat-
form based on the publish/subscribe model. We ad-
dressed the deterministic local search method on low
QoS settings for a communication environment with
message loss, where the solution method must con-
tinue with temporally missing agents. We experimen-
tally evaluated the influence of several approaches to
handle temporally non-responding agents in an exe-
cuting solution process, and our result revealed the
potentiality of such approaches. On the other hand,
the proposed methods compromise the monotonicity
of anytime solution that is a property of the original
MGM algorithm, and some additional investigation is
necessary to ensure the stability of the solution.
Our future study will investigate different solution
methods with more phases, mechanisms to improve
the stability of anytime solutions, application to dy-
namically changing problems, and evaluation in ac-
tual environments.
ACKNOWLEDGEMENTS
This study was supported in part by The Telecom-
munications Advancement Foundation (2022 Re-
search Grant) and JSPS KAKENHI Grant Number
22H03647.
REFERENCES
Choudhury, M., Mahmud, S., and Khan, M. M. (2020). A
Particle Swarm Based Algorithm for Functional Dis-
tributed Constraint Optimization Problems. In Pro-
ceedings of the 34th AAAI Conference on Artificial In-
telligence, volume 34, pages 7111–7118.
Fioretto, F., Pontelli, E., and Yeoh, W. (2018). Distributed
Constraint Optimization Problems and Applications:
A Survey. Journal of Artificial Intelligence Research,
61:623–698.
Fioretto, F., Yeoh, W., and Pontelli, E. (2017). A Mul-
tiagent System Approach to Scheduling Devices in
Smart Homes. In Proceedings of the 16th Conference
on Autonomous Agents and MultiAgent Systems, page
981–989.
Kumar, A., Faltings, B., and Petcu, A. (2009). Distributed
constraint optimization with structured resource con-
straints. In Proceedings of the 8th International Con-
ference on Autonomous Agents and Multiagent Sys-
tems, pages 923–930.
Maheswaran, R. T., Pearce, J. P., and Tambe, M.
(2004a). Distributed Algorithms for DCOP: A Graph-
ical Game-Based Approach. In Proceedings of the
17th International Conference on Parallel and Dis-
tributed Computing Systems, pages 432–439.
Maheswaran, R. T., Tambe, M., Bowring, E., Pearce,
J. P., and Varakantham, P. (2004b). Taking DCOP
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
436

to the Real World: Efficient Complete Solutions for
Distributed Multi-Event Scheduling. In Proceed-
ings of the 3rd International Joint Conference on Au-
tonomous Agents and Multiagent Systems, pages 310–
317.
Mahmud, S., Choudhury, M., Khan, M. M., Tran-Thanh,
L., and Jennings, N. R. (2020). AED: An Anytime
Evolutionary DCOP Algorithm. In Proceedings of the
19th International Conference on Autonomous Agents
and MultiAgent Systems, pages 825–833.
Matsui, T. (2020). Decentralized Constraint Optimization
in Composite Observation Task Allocation to Mobile
Sensor Agents. In Proceedings of the 18th Interna-
tional Conference on Practical Applications of Agents
and Multi-Agent Systems, pages 171–187.
Matsui, T. (2023). Study on Decentralized Anytime Evolu-
tionary Algorithm for DCOPs Containing Adversarial
Agents. In In Proceedings of the 15th International
Conference on Agents and Artificial Intelligence, vol-
ume 1, pages 338–346.
Matsui, T. and Matsuo, H. (2012). Considering Equality on
Distributed Constraint Optimization Problem for Re-
source Supply Network. In 2012 IEEE/WIC/ACM In-
ternational Joint Conferences on Web Intelligence and
Intelligent Agent Technology, volume 2, pages 25–32.
Matsui, T., Matsuo, H., Silaghi, M. C., Hirayama, K.,
Yokoo, M., and Baba, S. (2010). A Quantified Dis-
tributed Constraint Optimization Problem. In Pro-
ceedings of the 9th International Conference on Au-
tonomous Agents and Multiagent Systems, volume 1,
pages 1023–1030.
Modi, P. J., Shen, W., Tambe, M., and Yokoo, M. (2005).
Adopt: Asynchronous distributed constraint optimiza-
tion with quality guarantees. Artificial Intelligence,
161(1-2):149–180.
Nguyen, D. T., Yeoh, W., Lau, H. C., and Zivan, R. (2019).
Distributed Gibbs: A Linear-Space Sampling-Based
DCOP Algorithm. Journal of Artificial Intelligence
Research, 64(1):705–748.
Okimoto, T., Joe, Y., Iwasaki, A., Yokoo, M., and Falt-
ings, B. (2011). Pseudo-Tree-Based Incomplete Al-
gorithm for Distributed Constraint Optimization with
Quality Bounds. In Proceedings of the 17th Interna-
tional Conference on Principles and Practice of. Con-
straint Programming, volume 6876 of Lecture Notes
in Computer Science, pages 660–674.
Ottens, B., Dimitrakakis, C., and Faltings, B. (2012).
DUCT: An Upper Confidence Bound Approach to
Distributed Constraint Optimization Problems. In
Proceedings of the 26th AAAI Conference on Artificial
Intelligence, pages 528–534.
Pearce, J. P., Tambe, M., and Maheswaran, R. (2008).
Solving Multiagent Networks Using Distributed Con-
straint Optimization. AI Magazine, 29(3):47–62.
Petcu, A. and Faltings, B. (2005). A Scalable Method for
Multiagent Constraint Optimization. In Proceedings
of the 19th International Joint Conference on Artificial
Intelligence, pages 266–271.
Rachmut, B., Zivan, R., and Yeoh, W. (2022).
Communication-Aware Local Search for Dis-
tributed Constraint Optimization. Journal of Artificial
Intelligence Research, 75:637–675.
Ramchurn, S. D., Farinelli, A., Macarthur, K. S., and Jen-
nings, N. R. (2010). Decentralized Coordination in
RoboCup Rescue. Computer Journal, 53(9):1447–
1461.
Rogers, A., Farinelli, A., Stranders, R., and Jennings, N. R.
(2011). Bounded Approximate Decentralised Coordi-
nation via the Max-Sum Algorithm. Artificial Intelli-
gence, 175(2):730–759.
Yeoh, W., Felner, A., and Koenig, S. (2008). BnB-ADOPT:
an asynchronous branch-and-bound DCOP algorithm.
In Proceedings of the 7th International Joint Confer-
ence on Autonomous Agents and Multiagent Systems,
pages 591–598.
Yeoh, W. and Yokoo, M. (2012). Distributed Problem Solv-
ing. AI Magazine, 33(3):53–65.
Yokoo, M., Durfee, E. H., Ishida, T., and Kuwabara,
K. (1998). The Distributed Constraint Satisfac-
tion Problem: Formalization and Algorithms. IEEE
Transactions on Knowledge and Data Engineering,
10(5):673–685.
Zhang, W., Wang, G., Xing, Z., and Wittenburg, L. (2005).
Distributed stochastic search and distributed breakout:
properties, comparison and applications to constraint
optimization problems in sensor networks. Artificial
Intelligence, 161(1-2):55–87.
Zivan, R., Glinton, R., and Sycara, K. (2009). Distributed
Constraint Optimization for Large Teams of Mobile
Sensing Agents. In 2009 IEEE/WIC/ACM Interna-
tional Joint Conference on Web Intelligence and In-
telligent Agent Technology, volume 2, pages 347–354.
An Investigation of Distributed Constraint Optimization with Non-Responding Agents Toward Real-Time Solution Method on Practical
Messaging Platforms
437
