
A Unified Conceptual Framework Integrating UML and RL for
Efficient Reconfiguration Design
Amen Ben Hadj Ali and Samir Ben Ahmed
Faculté des Sciences de Tunis, Tunis El Manar University Tunis, Tunisia
Keywords: RCS Design, UML, OCL, Reinforcement Learning, Reconfiguration Models, Q-Learning, Exploration,
Reconfiguration Design.
Abstract: The problem of early exploration of various design choices to anticipate potential runtime changes at design
time for complex and highly-dynamic Reconfigurable Control Systems (RCS), is still a real challenge for
designers. This paper proposes a novel conceptual framework that integrates the benefits of UML-based
modeling with Reinforcement Learning (RL) to overcome this difficulty. Our proposal exploits UML dia-
grams enriched with OCL constraints to describe the reconfiguration controller structure and dynamics us-
ing predefined reconfiguration knowledge. On the other hand, the reconfiguration controller is designed as a
RL agent (Reinforcement Learning Reconfiguration Agent or RLRA) able to improve its knowledge
through online exploration while running a Q-Learning algorithm. The design process we propose starts
with an abstract UML-based specification of RCS. Then, a RL-based framework in Python language will be
generated from UML/OCL models by applying a generation algorithm. Finally, the resulting framework
will be run to allow the RLRA learning optimized reconfiguration policies and eventually improve first de-
sign specifications with learning feedback. The learning phase supports both offline and online learning and
is based on a Q-Learning algorithm.
1 INTRODUCTION
Manufacturing control systems continue to evolve
steadily in the age of the fourth industrial revolution
(Industry 4.0) (PI, 2016), where a series of require-
ments such as autonomy and reconfigurability
(Elmaraghy et al., 2021), are imposed on future
controllers and control approaches to fit the next
generation of production systems based on the con-
cept of Cyber-Physical System (CPS) (Monostori et
al. 2016). Reconfiguration allows the control system
to switch from one configuration to another, improv-
ing the system's efficiency concerning unexpected
changes such as environmental disturbances, and
unpredictable events, like failures (Koren et al.,
1999).
In this research work, with reconfiguration con-
troller, we refer to the software module that, taking
as input a representation (configuration) of the con-
trolled system managed by the controller, selects a
discrete high-level sequence of reconfiguration ac-
tions (a reconfiguration policy) leading to a safe
configuration of the whole system.
Within the field of Reconfigurable Control Sys-
tems (RCS), designers are faced with two major
difficulties: (1) making reconfiguration knowledge
explicit through appropriate conceptual models,
which is a crucial step for managing reconfiguration
requirements (Lepuschitz, 2018). In this context, the
additional value of UML-based (Unified Modeling
Language) (OMG, 2017) models and model-driven
engineering (MDE) is widely recognized, due to the
high-level abstraction and the automation of analysis
and full code generation that they can provide
(Vyatkin, 2013). (2) Moreover, given the challenge
of fast-changing dynamic manufacturing environ-
ments, it is hardly possible to fully explore all con-
trol software configurations. Thus, the use of Ma-
chine Learning (ML) techniques is a quite natural
and appealing approach. Specifically, Reinforcement
Learning (RL) (Sutton and Barto, 2018) is a subfield
of machine learning that offers algorithms for learn-
ing to control a system by interacting with it and
observing feedback (reward). Using this feedback is
an efficient means to evaluate how well a controller
is performing. This ability is important in the RCS
context since it is difficult to write a deterministic
604
Ben Hadj Ali, A. and Ben Ahmed, S.
A Unified Conceptual Framework Integrating UML and RL for Efficient Reconfiguration Design.
DOI: 10.5220/0012468600003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 2, pages 604-613
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

control program that can anticipate all unexpected
changes and thus implement a high-quality control-
ler, but it is relatively easy to specify a feedback
signal that indicates the best reconfiguration actions
to perform. Another advantage of RL is the possibil-
ity of extending the design space based on learning
feedback.
A possible way to overcome the identified diffi-
culties is by combining the benefits of the UML-
based design approach with reinforcement learning
capabilities. As far as we know, the present work is
original since it represents a first attempt to combine
UML and model-driven design principles with RL
benefits into a novel unified conceptual framework
to address the challenges of reconfiguration
knowledge modeling and exploration. The value of
such a design approach is that it enables partial re-
configuration knowledge (prior knowledge) model-
ing and analysis using UML-based models. The rest
of the knowledge (e.g., which sequence of reconfig-
uration actions to select and the order in which to
select them), is learned by the run-time RL model.
Clearly, the proposed reconfiguration controller,
referred to as RLRA (Reinforcement Learning Re-
configuration Agent) is a decision maker that has to
be designed in order to output an “efficient recon-
figuration policy” in every situation. In our work,
the notion of efficiency is typically obtained as an
emerging property coming from the ensemble of
different design objectives, namely, safety and opti-
mal reconfiguration time. The proposed RL-based
framework for RCS design is a Python environment
that is able to run Python 3.6, or above, for the exe-
cution of reconfiguration control functions devel-
oped in Python language. The idea behind using
Python language is to enable the latest advances in
machine learning to integrate at the control level
with existing industrial standards like the IEC 61499
(IEC, 2005).
In this paper, we explore the use of standard
UML (OMG, 2017) models, enriched with OCL
(Object Constraint Language) (OMG, 2014) con-
straints, for the specification of RCS. We shall rely
on UML as a modeling language, since many exist-
ing tools (such as USE (Gogolla, 2007)) provide a
wide variety of analysis capabilities for UML mod-
els, including model validation, instance generation,
or invariant checking. In addition, high-level UML
and OCL models are used in order to encode design
objectives (such as safety) during the early design
stages into lightweight models with lower develop-
ment costs than the full implementation of the con-
trol system.
Furthermore, for safety-critical systems, includ-
ing prior knowledge in the exploration process of the
RL agent is often used as a solution to avoid risky
situations during the exploration (Garcïa, 2015). In
this paper, UML/OCL models give an abstract rep-
resentation of prior knowledge and thus allow to
focus exploration of the RLRA’s state space, reduc-
ing risks as well as the random phase that a RL agent
must endure while learning about a new environ-
ment. In addition, since a RL agent is effectively
operating in a reduced state space, learning will also
be faster.
The contributions of this work are threefold: (1)
the abstract and formal modeling of reconfiguration
knowledge using UML/OCL models and RL math-
ematical fundamentals thus allowing both early
analysis and fast exploration of various design
choices for the lower-level implementation. A set of
rules is defined in order to allow the generation of
RL models from UML/OCL models. (2) In addition,
our design process handles learning since the recon-
figuration controller is designed as a RL agent
(RLRA) and therefore it supports exploitation as
well as exploration. In particular, the RLRA imple-
ments a Q-Learning algorithm and supports opti-
mized exploration. (3) Furthermore, to enforce gen-
eralization and give more flexibility to the design
approach, we define a metamodel that abstracts the
proposed framework knowledge allowing the de-
signer to integrate new concepts, algorithms, and
modeling techniques.
The remainder of the paper is structured as fol-
lows. Section 2 presents the fundamentals of the used
concepts. In particular, it presents the core of the
applied machine learning technique for reconfigura-
tion control design. Section 3 presents a brief review
of related work. Section 4 gives an overview of the
proposed design process. Section 5 focuses on pre-
senting the main contributions of the proposal. Sec-
tion 6 presents a case study that will be used to show
the applicability of the proposed conceptual frame-
work. Finally, the contributions of the paper and the
further challenges are summarized in Section 7.
2 PRELIMINARIES
To provide a comprehensive guide to understanding
the remainder of this paper, this section introduces
some basic theoretical notions of RL.
The central idea of RL is that the learning agent
learns over time by trying the different available
actions in different situations and evaluates the out-
come of each action, both in terms of immediate
A Unified Conceptual Framework Integrating UML and RL for Efficient Reconfiguration Design
605

reward (i.e., the action’s immediate effect on the
environment) and long-term cumulative reward (i.e.,
the contribution to the learning agent’s overall ob-
jectives). The basic mathematical model of RL is
Markov Decision Processes (MDP) (Bellman, 1957).
Fundamentally, an MDP aims to solve a sequential
decision-making (control) problem in stochastic
environments where the control actions can influence
the evolution of the system’s state. An MDP is de-
fined as a five-tuple (S, A, R, P, γ) as follows: S is the
state space, and A is the action space.
P: S × A × S → [0, 1] gives the state transition
probability. P( s′|s, a), specifies the probability of
transition to s′ by taking action a in state s. R: S ×
A→
ℝ
is the reward function dictating the reward an
agent receives by taking action a ∈ A in state s ∈ S,
and γ ∈ [0, 1] is the discount factor (Sutton and Bar-
to, 2018).
It is essential to notice that the environment of
our RL agent is the reconfigurable system (the con-
trolled system), in contrast to classical RL frame-
works, where the environment is represented by the
uncontrolled system.
Two main learning strategies are available, ex-
ploration and exploitation. Making sure that the
agents explore the environment sufficiently is a
common challenge for RL algorithms known as the
exploration-exploitation dilemma. The ε-greedy
policy is a well-known method to address the explo-
ration-exploitation trade-off while training the RL
agent. This method, can balance exploration and
exploitation and make sure we are never ruling out
one or the other. Our exploration strategy uses
constraints defined in UML models to give structure
to the reconfiguration design space and thereby
leverage additional information to guide exploration.
Each configuration is considered as a valid
constraints’ combination defined on reconfigurable
active parts (elements) of the control system.
3 RELATED WORK
Solutions and research efforts already exist tackling
RCS design using different approaches. In particu-
lar, for classical manufacturing control systems,
several works (Thramboulidis and Frey, 2011) (Ben
Hadj Ali et al., 2012) (Fay et al. 2015) (Ouselati et
al., 2016) adapt UML and its extensions (such as
SysML and MARTE) for designing and modeling
the control logic (Vyatkin, 2013). These works often
aim to reduce control software complexity by raising
the abstraction level while ensuring automatic gen-
eration of PLC (Programmable Logic Controller)
standard-compliant code (IEC 61131 and IEC
61499) (Vyatkin, 2013). In addition, more recent
research works, such as (Thramboulidis and Chris-
toulakis, 2016) (Schneider et al., 2019) (Müller et
al., 2023) (Bazydło, 2023) (Parant, 2023), introduce
UML-based solutions to model and design the con-
trol part of manufacturing systems compliant with
I4.0 and that are considered CPSs in which multiple
concurrent software behaviors govern industrial
components running on embedded controllers.
As a semi-formal language, UML provides high
relevance to handling the semantic gap between
system design and the actual features of the control
application. However, UML-based design approach-
es suffer from a lack of precise semantics. For this
reason, several researchers propose to combine
UML diagrams with formal languages for the mod-
el-based design of RCS. The formalization of con-
trol model elements is performed using formal lan-
guages (such as Petri nets, Timed Automata, etc.) to
describe specific reconfiguration requirements and
thus guarantee the consistency and the correctness of
the specification and code generation by using veri-
fication techniques (such as model checking) (Vyat-
kin 2013) (Mohamed et al., 2021). These approaches
allow for verifying that the system behaves correctly
for all possible input scenarios by giving a precise
description of the possible system behavior. Howev-
er, most of them are based on an automated trans-
formation from a system description with informally
defined semantics and lack learning capabilities. In
addition, the reviewed works have in common the
exploitation of UML-based metamodels and models
to deal with reconfiguration and reconfigurable
systems modeling (Mohamed et al., 2021) and there-
fore allow the automation of several design steps
such as validation/verification and code generation.
However, they are often static since reconfiguration
knowledge that is not anticipated during design time
is handled statically by revising (modifying) existing
models offline (Ben Hadj Ali and Ben Ahmed,
2023).
Furthermore, several works have proposed many
RL agents to model efficient reconfiguration con-
trollers that can learn optimized reconfiguration
policies (plans). The optimization goal is therefore
formulated using the reward (objective) function of
the RL agent (Wuest et al. 2016) (Kuhnle et al.,
2020) (Shengluo and Zhigang 2022) (Saputri, and
Lee, 2020). Despite learning capabilities, the dy-
namicity of the reconfiguration space is only partial-
ly implemented within these approaches because
they mainly focus on exploitation with random ex-
ploration. Therefore, an effective conceptual frame-
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
606
work, that bridges the gap between UML and RL
modeling, is still needed. In the following sections,
we will detail our proposal to deal with the identified
literature drawbacks.
4 DESIGN PROCESS
To highlight the contributions of this work, we pro-
pose in the following section a generic process for
RCS design represented as a UML activity diagram
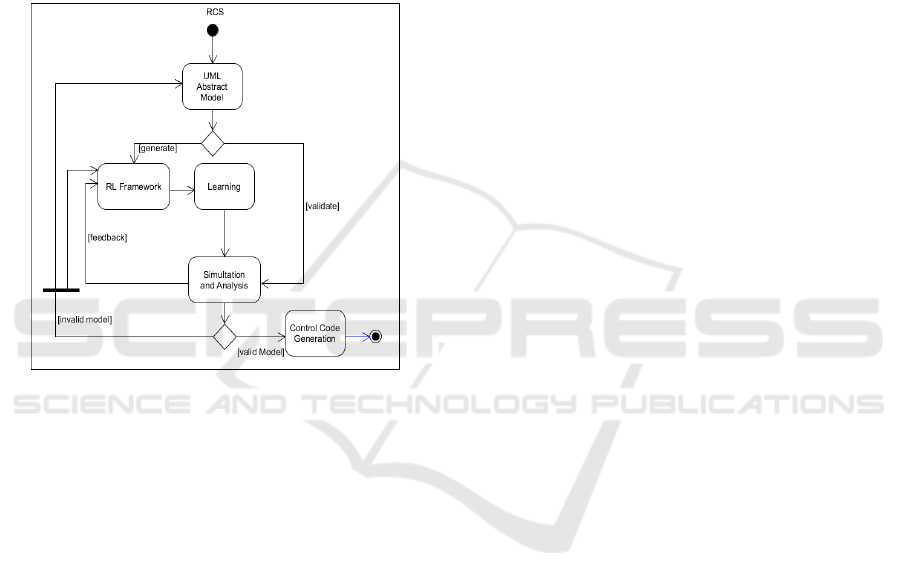
(see Figure 1):
Figure 1: RCS Design process.
a) RCS Abstract Specification: The represen-
tation of reconfiguration knowledge (structures,
behaviors, constraints, etc.) through abstract specifi-
cations using UML/OCL models.
b) RCS Modeling: The output of this step is
an abstract model expressed using a formal or semi-
formal language. In contrast to the majority of re-
viewed approaches, where the design aim is valida-
tion/verification, in this work the design purpose is
learning, therefore the obtained model is expressed
using RL concepts. Thus, this step aims to generate
the code of a RL-based framework which will be
used later for the learning step.
c) Learning: In this proposal, the learning
step allows the RLRA to learn optimized reconfigu-
ration policies using a hybrid strategy supporting
both exploitation and exploration. In particular,
online exploration allows for improving RCS mod-
els (UML-based and RL-based) with operation-time
learned knowledge.
d) Simulation: The obtained RCS model can
be analyzed using simulation. Therefore, the initial
models can be improved or validated and then stored
within the Knowledge Base. In our work, the valida-
tion of the proposed models is undertaken using the
USE (UML-based Specification Environment) tool
(USE, 2021).
e) Code Generation: In this step, the high-
level control code is generated using a specific lan-
guage (such as Java, C/C++, Python, etc.).
The main contributions of this paper focus on the
first three steps of the design process and conse-
quently, they will be detailed in the remainder (i.e.,
Abstract Specification, RL models generation, and
Learning).
5 CONCEPTUAL FRAMEWORK
As stated previously, the design process followed in
this paper progresses from the state-of-the-art RCS
design process by enhancing the reconfiguration
controller (RLRA) with learning capabilities. In-
deed, our process handles a learning phase that gives
the reconfiguration controller the ability to learn
optimized reconfiguration rules and also to improve
its knowledge through online exploration. Our pro-
posed conceptual framework is composed of five
steps (see Fig. 1). The Simulation and Code Genera-
tion steps are out of the scope of this paper. The first
three steps will be detailed in the following sections.
5.1 Abstract Specification Using UML
In this paper, the high-level control part of RCS is
specified as UML diagrams. Structures are described
using class diagrams, whereas behaviors are repre-
sented using state diagrams. Such a choice is often
sufficient for specifying the dynamics of the control
level since UML state machines represent a common
tool used to specify the behavior of complex and
real-time systems (Harel and Politi, 1998).
Therefore, the first step in our conceptual
framework for the design of RCS corresponds to the
elaboration of the RCS UML-based specifications
according to the metamodel of Fig. 3. The proposed
metamodel is structured into three packages corre-
sponding to the respective models of, the state space
(CM, i.e., ConfigurationModel package), the action
space (RM, i.e., ReconfigurationModel package) and
the RL reconfiguration agent (RLRAM, i.e.,
RLRAModel package).
The presented conceptual elements and their in-
teractions are defined as follows: dynamic reconfig-
urations are driven by the Reconfiguration Agent
(RLRA) which monitors the reconfigurable con-
trolled system and allows to reconfigure its actual
A Unified Conceptual Framework Integrating UML and RL for Efficient Reconfiguration Design
607
configuration when it detects an internal or external
reconfiguration requirement (trigger). In the remain-
der of this subsection, we will present the basic
concepts and operations defined within the
knowledge metamodel using UML diagrams and
OCL constraints. The central concept in the pro-
posed metamodel is represented by class Reconfigu-
rableElement. This class allows for describing any
changeable and observable part of the control sys-
tem, namely the controller (Class RLRA), any con-
trolled element (class ControlledElement), any re-
configuration constraint (class Reconfig-Constraint)
and any configuration of the RCS (class Configura-
tion). Each object of this class is reconfigurable
since its structure or behavior can change over time.
In the following subsections, we focus on presenting
the main concepts and operations proposed to de-
scribe the controller structure and behavior.
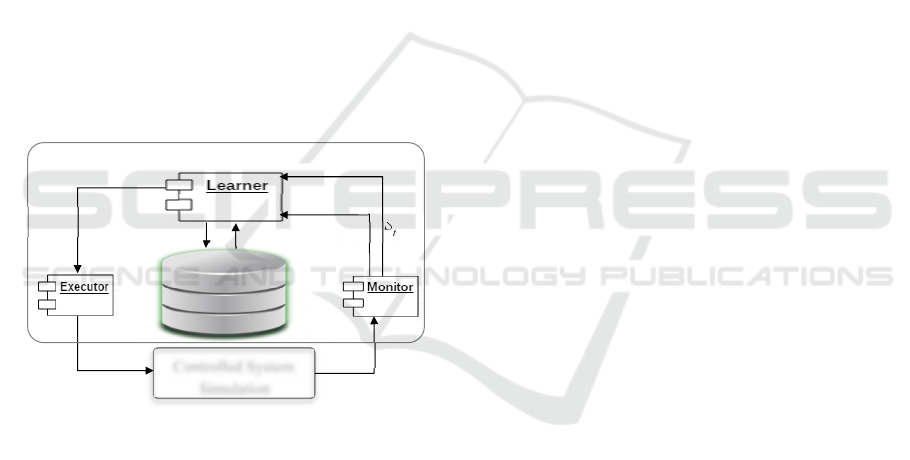
5.1.1 RLRA Structure
The RLRA structure is composed of three compo-
nents as shown in Figure 2: The Monitor, the Learn-
er and the Executor.
Figure 2: RLRA structure metamodel.
At one moment in time, the RLRA can have only
one active configuration (an object of class Configu-
ration). A configuration is a set of objects of the
class ControlledElement. For each active object
(isActive is True) of the ControlledElement class
(CE) (part of the current Configuration of the
RLRA), we define a set of constraints and reconfigu-
ration points (RP).
A RP represents a change value ∆
of the cur-
rent value of the CE (∆
)that makes the currently
observed constraints (applied on the CE) not satis-
fied.
The operation update for a controlled element
and checkRP for a constraint are described in OCL
as follows:
context ControlledElement::
update(delta: ValueType, ts : Time):
post: value = value@pre + delta
context ControlledElement::
checkRP(ts : Time): Boolean
pre: self.isActive
post:self.constraints->
exists(c.isValid=#true and
c.timestamp=ts and self.rps->
exists(rp.isValid=#true and
rp = not c and rp.timestamp=ts))
In addition, RLRA implements a query operation
(checkRP()) that decides if the agent has not yet
detected a reconfiguration trigger (internal or exter-
nal). This operation is described in OCL:
context RLRA::
checkRP(ts : Time): Boolean
pre: self.safetyLevel=#isSafe
body: self.triggers->
exists(t|t.timeStamp=#ts and
t.check())
When, a reconfiguration Trigger is detected, the
RLRA can start reconfiguring (the executed action ()
is reconfigure). When the current context of the
RLRA is known, (predefined =true) then the Execu-
tor sub-component starts the reconfiguration of the
current configuration until it reaches a safe output
configuration. This configuration is terminal
(isTerminal=true). However, when the context is
unknown, the Learning phase (realized by the
Learner sub-component) is launched to learn a new
(not yet stored in the Knowledge Base) safe output
configuration responding to the reconfiguration
trigger.
Class Context aims to save the history of the
learning phase represented by the knowledge of the
different situations the RLRA can have, i.e., the
current configuration of the agent when a reconfigu-
ration trigger is raised. The eventual solutions for
this context correspond to the reconfiguration poli-
cies learned by the agent during the offline or online
learning phase. If a given context has at least one
solution then it is considered as a known context
(predefined=true) and therefore the agent can exe-
cute the reconfigure() operation, otherwise it must
apply the learn() operation.
a
t
RLRA Controller
Knowledge Base
Controlled System
Simulation
S
t
Reconfiguration
Policy
S
t+1
r
t
a
t
Ex
p
loration
Ex
p
loitation
Offline/Online
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
608
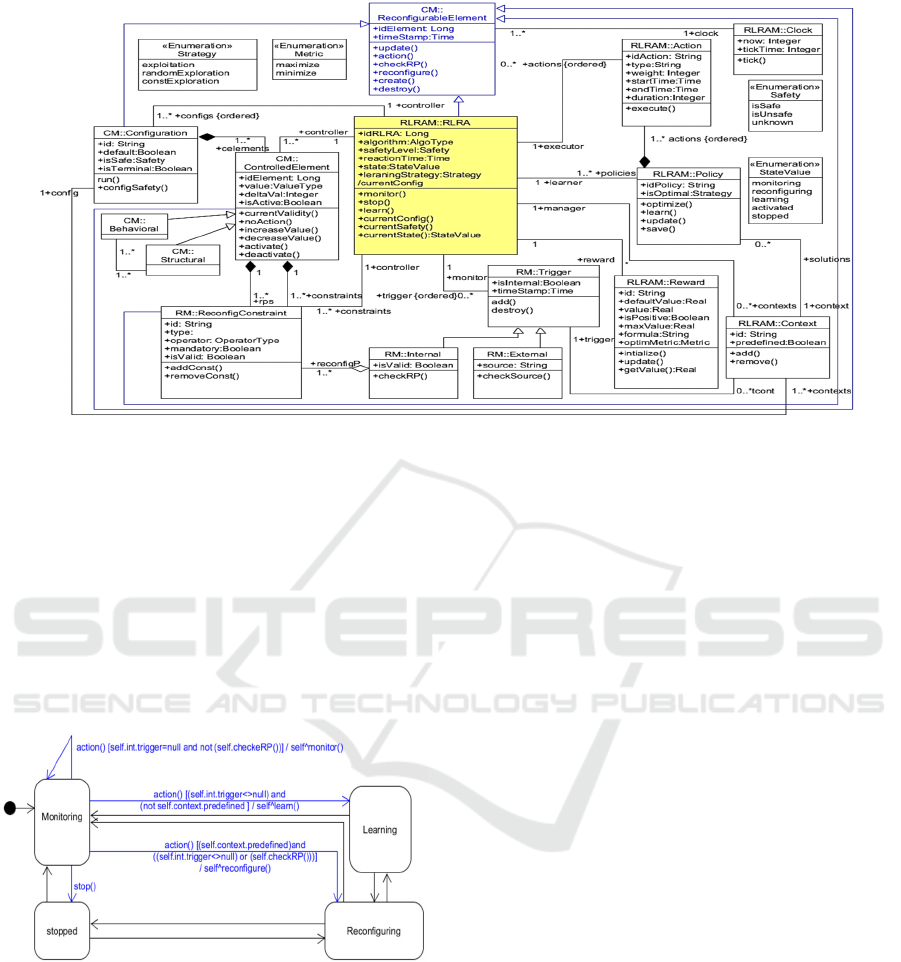
Figure 3: Reconfiguration knowledge metamodel.
5.1.2 RLRA Behavior
The reconfiguration controller is not guided by any
predefined plans, and hence it has to decide to take
an action at each time. The default state of the
RLRA (see Fig. 4) is “monitoring” (the executed
action() is monitor). In this state, the Monitor sub-
component observes the safetyLevel of the RLRA
and thus checks the reconfiguration points of each
observable and reconfigurable element.
Figure 4: Excerpt of the State Machine for the RLRA
behavior.
Furthermore, the controller is associated with a
Clock object that models Time. On every tick
(whose resolution is defined by the user, for
example, in our simulations we have used 0.5
seconds), it invokes operation action() on all active
and reconfigurable elements of the control system.
For example, as shown in Fig. 4, if the RLRA is
monitoring and there is no reconfiguration trigger
(internal or external event), the RLRA keeps moni-
toring; if the reconfiguration point for the agent is
reached (checkRP() returns true) or an external trig-
ger is detected, the agent starts reconfiguring or
learning; and if both steps generate no safe response
to the current reconfiguration request, then the agent
and the controlled system are stopped in order to
avoid dangerous behaviors.
Whenever a RP is reached an instance of class
Trigger is created. Therefore, the behavior of the
Monitor can be specified in OCL as the following
code fragment shows.
context RLRA monitor (ts: Time)body:
begin
def: iConf : Set(ControlledElement)
=self.currentConfig()
def: trig:=self.triggers->
(t|t.timestamp=ts and t.check())
t:=new Trigger, ctx:=new Context
if trig->isEmpty() then
for ce in iConf do
for econst in ce.constraints
for rp in ce.rps
if econst->intersection(not rp)->
notEmpty and rp.isValid and
rp.timestamp = econst.timestamp
then
t.timestamp=ts
insert(t) into Trigger
ctx=self.currentConfig()
ctx.trigger=t
insert(ctx)into Context
end
end
end
end
A Unified Conceptual Framework Integrating UML and RL for Efficient Reconfiguration Design
609

5.2 RL Models Generation
5.2.1 State Space
In this work, the state space for the RLRA is the set
of all possible configurations the agent could inhab-
it. In the proposed RL model, a state (denoted s) is
an observable combination of both Structural and
Behavioral controlled elements (see Figure 3) corre-
sponding to a possible configuration and represented
as a vector: s=((v
p1
, v
p2
, …, v
pn
), v
mode
), where the
vector (v
p1
, v
p2
, …, v
pn
) represents the respective
values of p
1
,…, p
n
that correspond to the active struc-
tural controlled elements composing the current
configuration. The vector v
mode
gives the values of
behavioral controlled elements (operations) that
describe the operational mode of the current config-
uration. The set C of all possible configurations of
the RLRA is separated into pairwise disjoint subsets:
the set of safe configurations C
safe
and C
unsafe
such as
C≜ 𝐶
∪𝐶
and C
safe
is the set of configura-
tions that satisfy all the system constraints and
which are validated through simulation. C
unsafe
is a
possible configuration that can
result from the learn-
ing process (exploration) and which is not validated
or it violates at least one constraint. Furthermore, the
default configuration is defined by the designer.
5.2.2 Action Space
The action considered by the RL agent is the recon-
figuration control. At each step t, the agent can per-
form an action a
t
from a discrete action space to a
given reconfigurable element (property) of the cur-
rent configuration. Each defined action corresponds
to the execution of a given operation of the Con-
trolledElement object. As shown in Table 1, action 0
means that the RLRA will maintain its current con-
figuration. Actions 1 and 3 represent positive (i.e.,
increase the value) and negative (i.e., decrease the
value) changes that cannot cause reconfiguration.
Action 2 represents the fact that the new value of the
property S
t+1
(p) (after applying the change ∆
)
triggers a reconfiguration and thus the controller has
to execute an adequate sequence of reconfiguration
actions (a policy) and to bring the system to a safe
destination configuration in order to respond to this
trigger. To prevent the agent from reaching negative
values, we clip the minimum value for all structural
reconfigurable elements to 0. We also limit the max-
imum value to some fixed value to avoid dangerous-
ly high values.
The transition model T(s
t+1
|s
t
, a
t
) for the obtained
MDP is deterministic. For action a
t
, we map it to
different values of changes ∆
as shown in Table
1. For each detected change, we update the proper-
ty’s value using the following rule:
S
(𝑝) = S
(𝑝) + ∆
S
(p).
Table 1: Mapping changes to operations and actions.
Action a
t
012 3
operation noAction
update/
increase
reconfigure
update/
decrease
∆
0
>
0 and
<
∆
∆
<0 an
d
|∆
|
<∆
As reconfigurable properties have discrete values
we consider ∆
= 1 as the smallest value of observ-
able change.
5.2.3 Reward Function
To achieve our safe reconfiguration goal, we consid-
er three components when designing the reward
function R(s, a), each with a specific objective.
a) R
safety
encodes the objective that the controller
should apply valid actions (i.e., actions that
maintain the set of reconfiguration constraints
satisfied) when updating the value or reconfigur-
ing a controlled element. If the controller applies
an invalid action, it receives a penalty of −10.
b) R
trigger
is the termination reward the controller
receives when it reaches a safe configuration that
responds to the reconfiguration trigger. If the con-
troller reaches the targeted configuration, it is giv-
en a reward of +10. Otherwise, it receives a penal-
ty of −10.
c) R
time
is the step reward that encourages the
controller to minimize the number of reconfigura-
tion actions required to reach the destination. For
every state along the controller’s path (except the
terminal state), the controller receives a penalty of
−1. The reward function for the RLRA is given by
the following equation:
𝑅
(
𝑠, 𝑎
)
=𝑅
+𝑅
+𝑅
.
5.2.4 Learning Algorithm
The algorithm used to approach the problem is Q-
learning (Watkins and Dayan, 1992) which incre-
mentally estimates the action value function Q(s, a).
The reconfiguration agent tries to learn the best
policy regarding a specific cost function (Q-value
function) for possible actions that can be performed.
An agent learns a mapping of states to actions based
on a learned policy. Q-learning updates the state-
action value mapping (i.e., updates its weights) at
every time step as follows:
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
610
𝑄
∗
(
𝑠, 𝑎
)
← 𝑄
∗
(
𝑠
,𝑎
)
+𝛼𝑟+ 𝛾𝑚𝑎𝑥
𝑄
∗
(
𝑠
,𝑎
)
𝑄
∗
(
𝑠
,𝑎
)
.
In order to make sure the action value function
converges, we allow the agent to explore by apply-
ing the ε-greedy strategy in the offline learning
phase. Specifically, the strategy chooses a random
action with probability ε (ε ϵ [0,1]). Otherwise, it
chooses the greedy action which achieves the maxi-
mum action value function for the current state.
Since most states are not explored at the beginning,
there is much higher uncertainty to start with. There-
fore, we set a relatively high ε at initialization and
decay it over time. Thus, the agent is encouraged to
explore the environment early in the learning pro-
cess and take full advantage of what it has learnt as
the policy converges. Finally, the policy π generated
by Q-learning can be expressed as follows using the
updated action value function Q:
𝜋
(
𝑠
)
=𝑎𝑟𝑔 max
∈
𝑄(𝑠, 𝑎).
The learning step is based on the Q-Learning al-
gorithm such that at each time step, the RLRA must
decide which combination s=((v
p1
, v
p2
, …, v
pn
),
v
mode
) is selected
.
The set of proposed generation rules is imple-
mented using the generation algorithm shown in Fig.5
Algorithm. Generation of the RL framework.
1. Input: UML/OCL models
2. Output: MDP_RCS= < C,A,r,π,γ >, S_Space C,
A_Space A, double [] r, double π, γ
3. Set<Class> RCS_structures
4. Set<Region> RCS_SM //the set of regions
describing the behavior of the RCS
5. RCS_modes, RCS_regions //the set of SM
describing the modes of the RCS
6. Set<ReconfigurableElement> VS, VM //the
set of properties describing the RCS
7. function Generate_StateSpace(Set<ModeSM>
RCS_modes):S_Space
8. for each class c
i
in RCS_structures do //
define one vector for each class
9. add vector VS
i
to VS // an ordered set of
reconfigurable structural elements of
the RCS
10. for each value pj in val(pj) do // pj
is an attribute of the class ci
11. add a value vpj to VSi // add a
value for each structural property
12. end for
13. end for
14. for each ModeSMi in RCS_modes do //
define one vector for each Mode_SM
15. add vector VM
i
to VM // an ordered set
of reconfigurable behavioral elements
of the mode SM
i
16. for each op
j
in VM
i
do
17. add a value vop
j
// add a value for
each behavioral property
18. end for
19. end for
20. for each Comb
i
=(VS
i
,VM
i
) //a combination
of structural and behavioral reconfigu-
rable properties
21. add a state Si to C// a configura-
tion within the state space
22. end for
23. return C
24. end function
25. function Gener-
ate_ActionSpace(Set<Region>
RCS_SM):A_Space
26. for each RE in RCS_model
27. for i in [0,3]
28. add ai to A // add a reconfiguration
action to the action space
29. for each Transition Ti in RCS_SM
30. add the preconditions to r // speci-
fy the reward value for the recon-
figuration action
31. add the postconditions to r // spec-
ify the reward value for the recon-
figuration action
32. end for
33. end for
34. end for
35. return A
36. end function
Figure 5: Generation Rules.
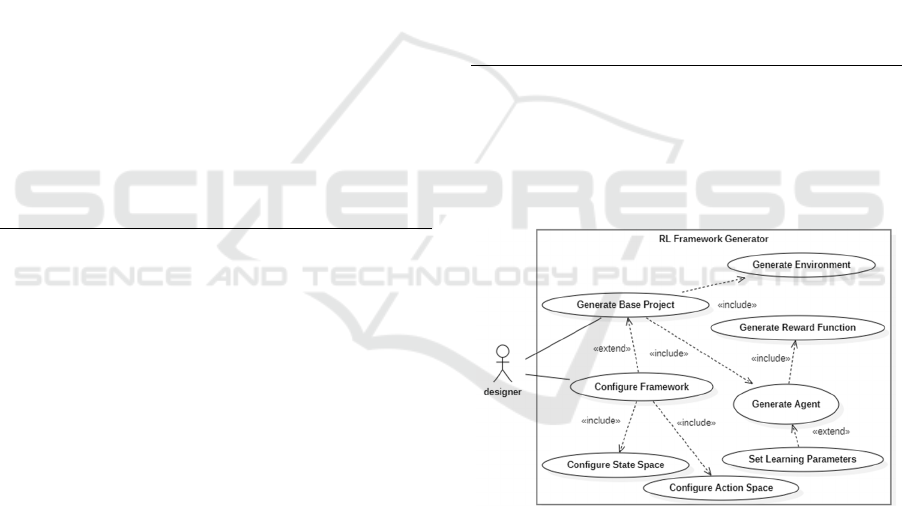
In order to assist designers while generating the
RL framework, we implemented the set of genera-
tion rules within a prototype tool (in Python) that
aims to automatize the design process.
Figure 6: Principal functionalities of RL framework
generator.
An overview of the principal functionalities of
the RL framework generator is given in Fig. 6.
6 CASE STUDY
As a representative example, we use the FESTO
production system (FESTO, 2016), to illustrate the
main features of our proposal. The considered RCS
complies with all the core reconfiguration character-
A Unified Conceptual Framework Integrating UML and RL for Efficient Reconfiguration Design
611

istics for manufacturing systems. The FESTO sys-
tem is composed of three units that cooperate to
produce drilled workpieces. We assume in this re-
search work two drilling machines DM1 and DM2
to drill pieces. If one of the drilling machines (DM1
or DM2) is broken, it is replaced by the other unbro-
ken one. In the case where both DM1 and DM2 are
broken, then the production system is stopped. The
state space of our example is based on the combina-
tion of the constraints defined on 5 controlled ele-
ments (DM1, DM2, np, p, mode) (np is the number
of pieces, p is the periodicity of production and
mode corresponds to the operational mode of the
system). According to the considerations mentioned
before, the modeling of the case study follows the
steps of the design process proposed in Section 5.
For the evaluation of the RL framework, we com-
pare two scenarios of implementation: we first im-
plement manually the case study with a ε-greedy Q-
Learning algorithm without considering conceptual
constraints. At a second time we configure the gen-
erated framework with the parameters of the same
case study (number of states, number of configura-
tions, number of controlled elements, etc.). The RL
algorithm is tested using the Python libraries Simpy
(simulation) and Scikit-learn (Q-Learning)
(Pyqlearning, 2016). The reconfiguration algorithm
is implemented with the following default hyperpa-
rameters: the discount factor was γ = 0.8, the learn-
ing rate α = 0.001, and ε=0.05. The performance of
the reconfiguration algorithm and learning process
are compared for different values of ε. For example,
a smart agent explores (ε=1) and takes the future
reward into account (γ = 0.9). A greedy agent cares
only about immediate reward with γ = 0.01 and
ε=0.1. The initial state is chosen randomly. An epi-
sode ends either after the agent reaches the goal or
after 100 steps. In general, the RL-agent converges
in Scenario 2 faster than in Scenario 1. This can be
explained by the reduction of dimension of the de-
sign space when we consider the conceptual con-
straints, which implies the optimization of learning
time.
7 CONCLUSION
In this paper, we propose a conceptual framework
that integrates the benefits of UML-based modeling
with RL concepts to handle the intelligent design of
RCS allowing for reconfiguration model improve-
ment through the exploration of run-time
knowledge. At the first design step, reconfiguration
knowledge is abstracted using UML diagrams.
Thereafter, a RL-based model will be deduced from
established UML models including state and action
spaces. The RL-based framework is generated using
a set of generation rules and allows to formulate the
reconfiguration control problem as an MDP. Be-
sides, we incorporate the controlled system proper-
ties, into the state space and discretize the action
space for reconfiguration control. Moreover, we
encode safety and reconfiguration time objectives
into the reward function. The generated RL frame-
work is then used by the reconfiguration controller
which is designed as a RL agent to learn optimal
reconfiguration policies by applying Q-learning
algorithm. Finally, reconfiguration models can be
improved using learning feedback. The proposed
design approach progresses from the state of the art
of RCS design by studying the coexistence of UML-
based design with RL in a unified model. It also
opens up further research opportunities. Several
aspects will be addressed in future work. Firstly, we
plan a complete implementation of our approach
(specifically, the RL framework generator), as well
as further experimentation and simulation on other
case studies. We can also explore deep-learning
based RL algorithms to solve scenarios with larger
state and action spaces more efficiently.
REFERENCES
Bazydło G. (2023). Designing Reconfigurable Cyber-
Physical Systems Using Unified Modeling Lan-
guage. Energies, 16, 1273.
Bellman, R. (1957). A Markovian Decision Process. Indi-
ana University Mathematics Journal, 6, 679-684.
Ben Hadj Ali, A. and Ben Ahmed, S. (2023).
RLReC: Towards Reinforcement Learning-based Dy-
namic Design of Reconfiguration Control. In the pro-
ceedings of the 27th International Conference on
Knowledge-Based and Intelligent Information & En-
gineering Systems, KES-2023. Procedia Computer
Science, Volume 225, pages 3670-3680.
Ben Hadj Ali, A., Khalgui, M. and Ben Ahmed, S. (2012).
UML-Based Design and Validation of Intelligent
Agents-Based Reconfigurable Embedded Control Sys-
tems. Int. J. Syst. Dyn. Appl., 1, 17-38.
Elmaraghy, H., Monostori, L., Schuh, G. and Elmaraghy,
W.H., (2021). Evolution and future of manufacturing
s
y
stems. CIRP Annals, 70, 635-658.
Fay, A., Vogel-Heuser, B., Frank, T., Eckert, K., Hadlich,
T. and Diedrich, C. (2015). Enhancing a model-based
engineering approach for distributed manufacturing
automation systems with characteristics and design
patterns. Journal of Systems and Software, 101, 221-
235.
FESTO. (2016). MPSs
—
The modular production system.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
612

MPSs—The modular production system. Retrieved
October 30, 2022.
Garcïa, J. and Fernández, F. (2015). A comprehensive
survey on safe reinforcement learning. Journal of Ma-
chine Learning Research, 16(1), 1437-1480.
Gogolla M., Buttner F. and Richters M. (2007). USE: A
UML-based specification environment for validating
UML and OCL, Sci. Comput. Program., vol. 69, no. 1-
3, pages. 27
–
34.
Harel, D. and Politi, M. (1998). Modeling Reactive Sys-
tems with Statecharts: The STATEMATE Approach;
M
cGraw-Hill, Inc.: New York, NY, USA.
IEC. (2005). Function blocks – Part 1: Architecture. Func-
tion blocks
–
Part 1: Architecture. 2005.
Koren, Y., Heisel, U., Jovane, F., Moriwaki, T.,
Pritschow, G., Ulsoy, G. et al. (1999). Reconfigurable
Manufacturin
g
S
y
stems. CIRP Annals, 48, 527-540.
Kuhnle, A., Kaiser, J., Theiß, F., Stricker, N. and Lanza,
G. (2020). Designing an adaptive production control
system using reinforcement learning. Journal of Intel-
li
g
ent Manu
f
acturin
g
, 32, 855-876.
Lepuschitz, W. (2018). Self-reconfigurable manufacturing
control based on ontology-driven automation agents.
PhD Dissertation, Technische Universität Wien.
Mohamed, M. A., Kardas, G. and Challenger, M. (2021).
Model-Driven Engineering Tools and Languages for
Cyber-Physical Systems–A Systematic Literature Re-
view. IEEE Access, vol. 9, pages 48605-48630.
Monostori, L., Kádár, B., Bauernhansl, T., Kondoh, S.,
Kumara, S., Reinhart, G. et al. (2016). Cyber-physical
systems in manufacturing. CIRP Annals, 65(2), 621–
641.
Müller, T., Kamm, S., Löcklin, A., White, D., Mellinger,
M., Jazdi, N. and Weyrich, M. (2023). Architecture
and knowledge modeling for self-organized reconfigu-
ration management of cyber-physical production sys-
tems. International Journal of Computer Integrated
M
anufacturing. 36:12, 1842-1863.
OMG. (2014). Object Constraint Language Specification,
version 2.4 (omg.org/spec/OCL/2.4/PDF).
OMG. (2017). Unified Modeling Language, version 2.5.1
(omg.org/spec/UML/2.5.1/PDF).
Oueslati, R., Mosbahi, O., Khalgui, M. and Ben Ahmed,
S. (2016). A Novel R-UML-B Approach for Modeling
and Code Generation of Reconfigurable Control Sys-
tems. In the proceedings of the 11th International
Conference on Evaluation of Novel Software Ap-
proaches to Software Engineering – ENASE. SciTe-
Press, pages 140-147.
Parant, A., Gellot, F., Zander D., Carré-Ménétrier ,V. and
Philippot, A. (2023). Model-based engineering for de-
signing cyber-physical systems from product specifi-
cations. Computers in Industry, Volume 145.
PI. (2016). Plattform Industrie 4.0–Aspects of the research
roadmap in application scenarios. Plattform Industrie
4.0–Aspects of the research roadmap in application
scenarios. Retrieved October 30, 2022.
Pyqlearning. (2016). pyqlearning. Pyqlearning. Retrieved
October 30, 2022.
Sa
p
utri, T. and Lee, S.
(
2020
)
. The A
pp
lication of Ma-
chine Learning in Self-Adaptive Systems: A Systemat-
ic Literature Review. IEEE Access, 8, 205948-205967.
Schneider, G.F., Wicaksono, H. and Ovtcharova, J.
(2019). Virtual engineering of cyber-physical automa-
tion systems: The case of control logic. Adv. Eng. In-
f
orm., 39, 127
–
143.
Shengluo Y. and Zhigang X. (2022). Intelligent scheduling
and reconfiguration via deep reinforcement learning in
smart manufacturing. International Journal of Produc-
tion Research, 60:16, 4936-4953,
Sutton R. S. and Barto AG. (2018). Reinforcement learn-
ing: an introduction, 2nd ed. MIT Press, Cambridge,
USA.
Thramboulidis, K. and Christoulakis, F. (2016).
UML4IoT—A UML-based approach to exploit IoT in
cyber-physical manufacturing systems. Comput.
Ind., 82, 259
–
272.
Thramboulidis, K. and Frey, G. (2011). Towards a model-
driven IEC 61131-based development process in in-
dustrial automation. Journal of Software Engineering
and A
pp
lications, 4
(
04
)
, 217.
USE, (2021), https://sourceforge.net/projects/useocl
/
Vyatkin, V. (2013). Software engineering in industrial
automation, State-of-the-art. IEEE Transactions on
Industrial In
f
ormatics, 1234
–
1249.
Watkins, C.J.C.H. and Dayan, P. (1992). Q-
learnin
g
.
M
achine Learnin
g
8, 279
–
292.
Wuest, T., Weimer, D., Irgens, C. and Thoben, K.D.
(2016). Machine learning in manufacturing: Ad-
vantages, challenges, and applications. Prod. Manuf.
R
es., 4, 23
–
45.
A Unified Conceptual Framework Integrating UML and RL for Efficient Reconfiguration Design
613
