
Multi-Agent Based Framework for Cooperative Traffic Management in
C-ITS System
Ameni Aloui
1 a
, Hela Hachicha
1,2
and Ezzeddine Zagrouba
1 b
1
University of Tunis El Manar, Higher Institute of Computer Science, Laboratory of Informatics,
Modeling and Information and Knowledge Processing (LIMTIC), Ariana 2080, Tunisia
2
University of Jeddah, College of Computer Science and Engineering, Al Faisaliah, Jeddah, Saudi Arabia
Keywords:
C-ITS, Multi-Agent Systems, Traffic Management, Communication, Congestion Detection, Decision-Making.
Abstract:
The continual growth in road traffic poses significant challenges to effective traffic management, necessitat-
ing innovative solutions such as Cooperative Intelligent Transport Systems (C-ITS). This paper introduces a
novel multi-agent based model designed to address road traffic management in C-ITS systems. Our approach
aims to reduce congestion and enhance driver decision-making by leveraging dynamic communication and
information exchange between vehicles and infrastructure. Our multi-agent system is intricately designed to
play specific roles in managing traffic flow. Through real-time execution using a C-ITS road safety case study
focused on warning accidents, we evaluate the performance of our architecture through key metrics including
mean travel time and mean speed in the C-ITS system. The innovative aspects of our approach lie in the
integration of multi-agent systems in such a system, providing a significant advancement in the field of C-ITS
road traffic management. By detailing the instantiation of our system and emphasizing concrete services, we
contribute to the broader goal of improving road safety and traffic efficiency in urban environments.
1 INTRODUCTION
For decades, the transportation system has tirelessly
pursued advancements in efficiency, environmental
protection, and safety in traffic management. How-
ever, the escalating number of vehicles over the years,
as highlighted by recent statistics (Davis and Boundy,
2021), claims that “since 1900, the number of ve-
hicles per 1,000 persons in the United States has
increased dramatically. After reaching a peak of
844.5 in 2007, the number fell but then started to
rise in 2012. In the United States in 2018, there
were 836.3 vehicles per 1,000 persons”. The surge
in vehicle numbers necessitates a paradigm shift to-
wards improved road traffic management, a critical
aspect given its direct impact on daily life and en-
vironmental quality. Better road traffic management
must be implemented due to the rise in vehicle num-
bers over time. To ensure that traffic is maintained,
traffic management is largely concerned with service
management. Services are the main focus of C-ITS
systems. C-ITS, a cutting-edge extension of Intel-
a
https://orcid.org/0009-0009-7146-8106
b
https://orcid.org/0000-0002-2574-9080
ligent Transport Systems (ITS), emerges as a piv-
otal technology for augmenting traffic efficiency, road
safety, and environmental sustainability and provid-
ing comfort needs for end-users (driver) (Li et al.,
2022). C-ITS leverages Information and Commu-
nication Technologies (ICT) to facilitate real-time
information exchange among vehicles (Vehicle-to-
Vehicle, V2V) and between vehicles and infrastruc-
ture (Vehicle-to-Infrastructure, V2I). This communi-
cation is facilitated by the On-Board Units (OBU) in
connected vehicles and the Road Side Units (RSU)
within the infrastructure, representing the C-ITS sub-
systems. Therefore, C-ITS represents a transforma-
tive approach to better transportation through the in-
tegration of smart C-ITS sub-systems and advanced
communication technologies that specify how they in-
teract. In this interaction, C-ITS sub-systems com-
municate and cooperate based on international stan-
dards such as CEN, ISO, and ETSI. Therefore, C-
ITS makes it possible to go a step further in provid-
ing real-time information and tailored control strate-
gies to specific drivers. C-ITS excels in collecting
and disseminating real-time messages about the road
environment directly to drivers, thereby enhancing
decision-making. This connectivity can ameliorate
420
Aloui, A., Hachicha, H. and Zagrouba, E.
Multi-Agent Based Framework for Cooperative Traffic Management in C-ITS System.
DOI: 10.5220/0012468300003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 1, pages 420-427
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

road safety and efficiency, exemplified by services of-
fering advice, warnings, or actions. Despite the wide-
ranging benefits of C-ITS development and deploy-
ment, challenges in traffic monitoring, C-ITS com-
munication, and security persist as traffic manage-
ment issues. This paper focuses specifically on the
C-ITS traffic management challenge, recognizing its
potential to impede traffic efficiency and compromise
service delivery to drivers if not adeptly addressed.
Our key contribution lies in leveraging a multi-agent
system to model and simulate the complex dynamics
of road traffic. Unlike traditional approaches, which
often rely on centralized control mechanisms, our
methodology empowers individual agents to make au-
tonomous decisions based on real-time information.
This decentralized approach enables a more adaptive
and responsive system, particularly crucial during un-
foreseen events such as accidents or road works. Our
Contributions are summarised as follows:
• Propose a C-ITS architecture with a cluster de-
composition to facilitate traffic management and
increase road safety and traffic efficiency by con-
trolling and monitoring vehicles.
• Propose a new Multi-agent framework for co-
operative traffic management in C-ITS systems
to alleviate traffic congestion and improve driver
decision-making
This paper is structured in four sections: the first sec-
tion introduces our paper. The second section enu-
merates and details the different related work as well
as a brief description of our contribution. The third
section describes our architecture. The experimenta-
tion is presented in section fourth. We conclude our
research work in the last section with some future per-
spectives.
2 RELATED WORK
Literature explores Multi-Agent Systems (MAS) to
support C-ITS, addressing communication issues, es-
pecially in Vehicle Ad-Hoc Networks (VANET) as
the core part of such a system and traffic control for
better traffic management. For instance, in (Devan-
gavi and Gupta, 2017) agents collaborate on path dis-
covery using Bezier curves for multipath routing and
mobile agents for reducing communication costs. The
model outperforms in transmission time, number of
multipath computed, communication overhead, and
packet delivery ratio, but the short simulation time of
600 seconds warrants further testing in dynamic traf-
fic scenarios and complex situations like closed lanes
or segments.
Some research focuses on using MAS to address C-
ITS traffic management in all the systems includ-
ing its components. For instance, in (Zarari et al.,
2018) a generic architecture for the deployment of C-
ITS within a MAS dedicated to VANET is proposed.
The model utilises commonly stationary and mobile
agents and is based on a formal representation but
lacks evaluation of performance metrics and C-ITS
service management which is the main concern of the
C-ITS system. In the work of (Zouari et al., 2021)
a Cooperative MAS for Road Traffic Decision Mak-
ing based on Hierarchical Interval Type-2 Fuzzy Sys-
tem (HIT2FS) is proposed, showing positive results
in path flow and mean travel time, yet the short 360-
second simulation time calls for longer testing.
Other research works focus on specific components
of C-ITS using MAS. In (Gu
´
eriau et al., 2016), the
main focus was on the RSU. An agent-based model
focusing on the decision-making of the C-ITS sys-
tem to RSU components as discretized agents to de-
liver messages to vehicles. They propose a reinforce-
ment learning process model to send these messages
based on a k-means classification. Further details are
needed in this work such as reinforcement learning
algorithms used. In the research work of (Hamdani
et al., 2022), the main focus was on Smart Road Signs
(SRS) which is responsible for Traffic monitoring and
sending warnings to drivers. They propose route guid-
ance to reduce travel time based on mobile and sta-
tionary agents. However, this work was not evalu-
ated. The work of (Belbachir et al., 2019) focuses on
traffic lights and proposes a self-adaptive mechanism
to regulate traffic lights via I2I communication. This
work lacks scalability, it is specific at intersections to
deal with specific situations(congestion). In the work
of (Naderi et al., 2023), authors propose a hierarchi-
cal traffic light-aware routing scheme using reinforce-
ment learning at the two-level RSU and SDN to ad-
just their policies depending on the variation of time.
In (Teixeira et al., 2020) the focus is on autonomous
vehicles using Belief-Desire-Intention (BDI) agents
to make decisions within their cognitive capacities,
with scalability concerns and limited scenario testing.
Added to that, BDI agents are expensive in time exe-
cution. If the number of vehicles increases, the exe-
cution time will be much higher.
Other research work is focusing on congestion man-
agement due to warnings. We cite as an exam-
ple (Hamidi and Kamankesh, 2018) (Perez-Murueta
et al., 2019). For example, MAS was applied in
(Hamidi and Kamankesh, 2018) to deal with emer-
gency warnings. Their proposal was based on the in-
crease in the quality of the entire path network. Sim-
ilarly in (Perez-Murueta et al., 2019), a model was
Multi-Agent Based Framework for Cooperative Traffic Management in C-ITS System
421
designed to deal with congestion issues based on a
MAS. Authors utilize real-time probe vehicle data and
deep learning for traffic state prediction. The rerout-
ing process is done with entropy entropy-balanced k
shortest path for vehicles. However, the lack of eval-
uation against existing research limits the assessment
of their approach’s effectiveness.
The main difference between our proposal and the
approaches analyzed is that we will delve into the
rich value that multi-agent systems bring to the mod-
eling, exploration, and optimization of the complex
problems inherent in the different C-ITS subsystems.
Our proposal focuses on the limits of the analyzed
approaches for enhancing C-ITS architectures using
MAS, emphasizing adaptability for flexible traffic
management and services. This approach goes be-
yond cooperation, aiming for a holistic solution to the
challenges of modern transportation systems.
3 PROPOSED ARCHITECTURE
3.1 Hierarchical C-ITS Architecture
The proposed hierarchical C-ITS architecture, in-
spired by successful deployment projects, and with
respect to the standardization defined in the C-ITS
reference architecture (Dajsuren et al., 2017), implies
a set of components (C-ITS subsystems), which are
responsible for the operational aspect of the C-ITS
system based on their features and communication,
is structured into three levels (Fig. 1): Center System,
Infrastructure, and Urban Road. Each level plays a
crucial role in ensuring efficient traffic management
and enhancing road safety.
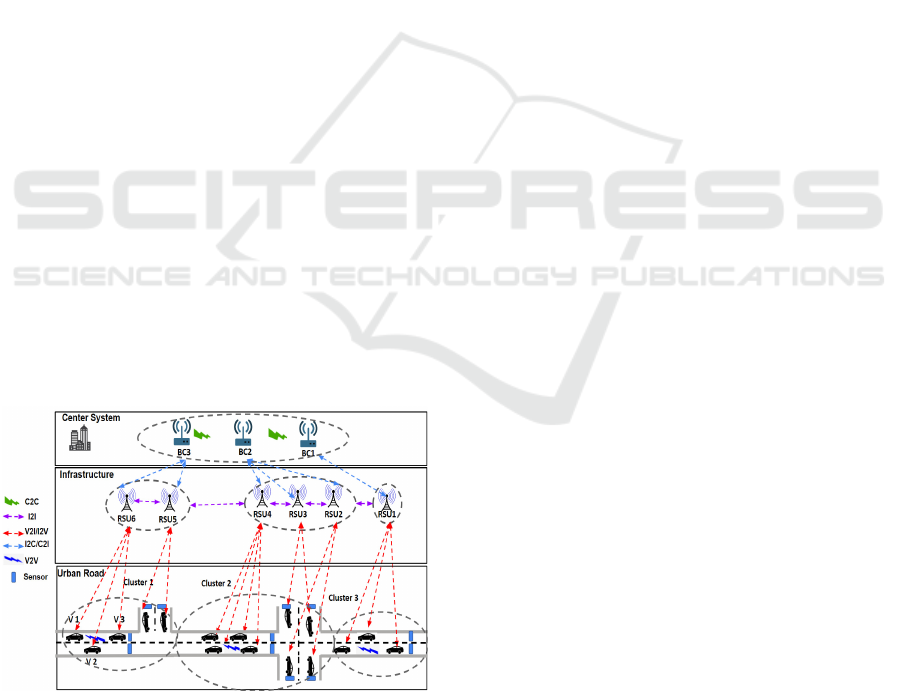
Figure 1: An overview of the proposed C-ITS system archi-
tecture.
1. Center System: is the highest level of the archi-
tecture aiming to control traffic. It comprises sev-
eral Base Controllers (BC), each one representing
a city. BCs facilitate communication with each
other through C2C communication, with RSUs in
the same city (I2C/C2I). Geographic considera-
tions ensure that each cluster represents a coherent
and manageable section of the road network.
2. Infrastructure. The Infrastructure level includes
RSUs as essential fixed components for guiding
and monitoring traffic. Their significance lies in
supporting local traffic management, addressing
intersection management, speed control, warning
systems, parking management, and overall traffic
monitoring. Details about RSU subsystems and
functionalities are elaborated in (Dajsuren et al.,
2017). Each RSU covers a specific zone, serving
as a data collection point for real-time monitoring
and analysis of road conditions.
3. Urban Road: is the low level of the architecture
equipped with a range of sensors such as loop de-
tectors, cameras, etc, and comprises a decomposi-
tion of the road to clusters. More details about
cluster decomposition are presented in our pre-
vious research work (Aloui et al., 2021). Each
cluster refers to one BC and comprises a set of
RSUs and vehicles equipped with the C-ITS sys-
tem. This implementation of C-ITS in vehicles
enables interaction between infrastructure via the
RSUs and vehicles via their OBUs (V2I/I2V) as
well as the interaction between vehicles (V2V).
RSUs actively provide data related to traffic flow,
congestion, and incidents, which is then processed
collaboratively with BCs to set and adjust rules ef-
fectively.
The development and deployment strategy of the C-
ITS systems hinges on the implementation of spe-
cific C-ITS applications within each sub-system. A
C-ITS application is a specific use case that falls un-
der a particular C-ITS service. To optimize these ap-
plications, our proposal advocates for the utilization
of agents as the fundamental building blocks of C-
ITS sub-systems. Each C-ITS application is concep-
tualized, designed, and implemented as a multi-agent
system, harnessing the power of agent-based technol-
ogy to enhance the system’s efficiency, communica-
tion, and decision-making. This innovative approach
aligns with the dynamic nature of traffic management,
leveraging agent-based systems to create a respon-
sive, collaborative, and adaptable framework for C-
ITS. The subsequent sections delve deeper into the
specifics of the multi-agent system implementation.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
422
3.2 Urban Road Architecture Based on
the Multi-Agent System in C-ITS
The adoption of a MAS in the proposed C-ITS ar-
chitecture is strategically justified for its capacity to
enhance decentralized decision-making, adaptability
to local contexts, and efficient information sharing
among intelligent agents. The MAS enables de-
centralized decision-making, allowing agents to au-
tonomously respond to local conditions.
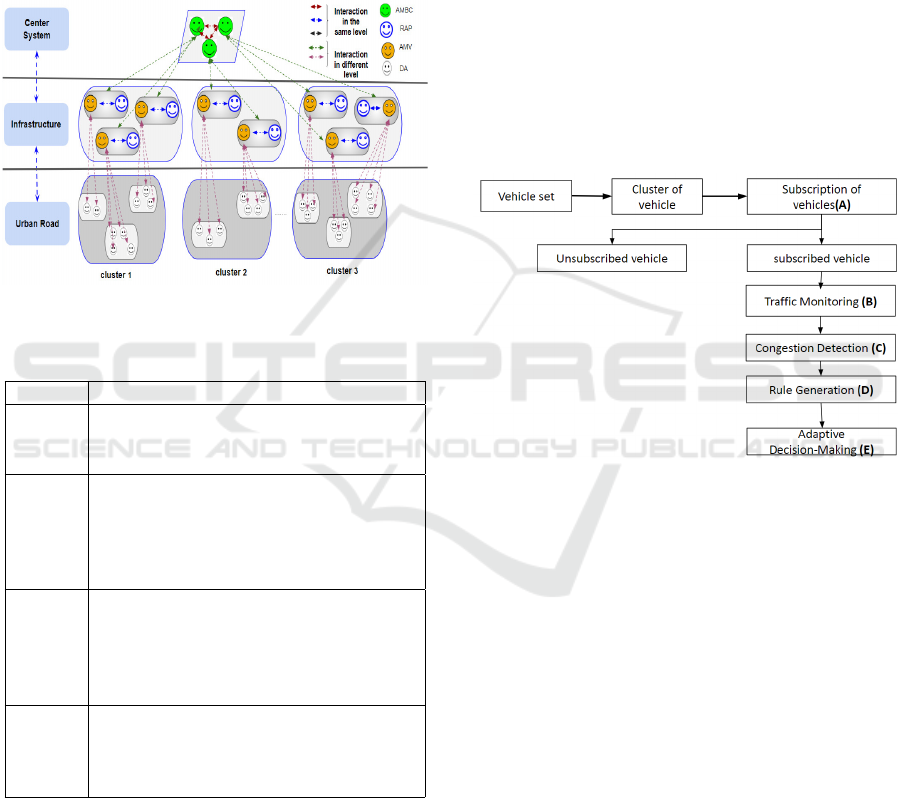
Figure 2: The distributed C-ITS architecture based on
MAS.
Table 1: Roles of each agents.
Agents Role
AMBC Have a global view in the entire traffic.
It aims to propose the relevant rules to
prevent congestion due to warnings.
RAP Check traffic conditions. It is responsi-
ble for detecting congestion situations.
It communicates with both AMV and
AMBC and informs them every prede-
fined time t about the traffic condition
AMV Checks the subscription and unsub-
scription of drivers in their covered
zone. It communicates with RAP,
AMBC and disseminates services to
subscribed DA
DA Interact with AMV for receiving warn-
ings, advice, and rules and transmitting
them to other DA as well as proposing
recommendations.
Our proposed MAS employs a set of stationary
agents, which handle the core functionalities within
each C-ITS subsystem, and we propose the integra-
tion of mobile agents in case of connection interrup-
tion in different C-ITS subsystems.
Figure (Fig. 2) illustrates the architecture of the
C-ITS system based on MAS Our multi-agent-based
architecture comprises four agents that cooperate to
manage and deploy C-ITS services.
Within the vehicle subsystem, the DA (Driver Agent)
is tasked with receiving services and facilitating real-
time information exchange with other DAs. In the
RSU subsystem, the AMV (Agent Manager Vehicle)
takes on the responsibility of receiving services and
sharing traffic-related data with the RAP (Road Agent
Parent). Similarly, within the BC subsystem, the
AMBC (Agent Manager Base Controller) analyzes
traffic data, receives real-time information and collab-
orates with BCs ’ agents and RSUs’ agents to enhance
overall system efficiency. This agent-based architec-
ture ensures dynamic and responsive road safety, fos-
tering effective communication and information shar-
ing across the entire system. The role of each agent is
described in (tab. 1). We define the operation of the
C-ITS system as consisting of the following different
steps represented in (Fig. 3).
Figure 3: Flowchart of the proposed method.
A. Subscription of Vehicles
In the dynamic landscape of C-ITS, the ”Subscrip-
tion of Vehicles” process plays a pivotal role, forming
a crucial link in the efficient management of traffic
and the delivery of essential C-ITS services. Vehicles,
upon entering the RSU-covered zone, have the option
to either subscribe to or unsubscribe from C-ITS ser-
vices. Subscription entails an agreement to share and
receive real-time information, fostering a cooperative
and informed traffic environment. Thus, when a ve-
hicle enters a new cluster, the nearest AMV in RSU
is responsible for detecting every vehicle. Each sub-
scribed vehicle exchanges information with the DA as
well as its parameters (ID, speed, destination. . . .) to
monitor and manage traffic information in its covered
zone. Unsubscribed vehicles will be detected by road
sensors. Every vehicle v
i
follows a set of routes rep-
resented by the following equation:
R = {r
1
, r
2
, r
3
......r
n
} (1)
Each subscribed DA sends a message to the corre-
Multi-Agent Based Framework for Cooperative Traffic Management in C-ITS System
423
sponding AMV as follows:
msgi = {id
v
i
, speed
v
i
, position
v
i
, destination
v
i
, route
i
}
(2)
Every subscribed vehicle will deploy a C-ITS
application according to the corresponding rules.
The AMV agent is responsible for detecting and
monitoring the set of vehicles as well as deploying
C-ITS applications based on rules to the subscribed
ones within their DAs.
B. Traffic Monitoring
As vehicles traverse the road network, subscribed
DAs continuously exchange real-time information
with the corresponding AMV in the RSU. The
AMV, responsible for monitoring and managing
traffic information in its covered zone, detects events
through the analysis of received data. Events can
include sudden changes in speed, unexpected stops,
or deviations from the planned route. For every
predefined interval time t, the AMV computes the
density k as follows:
k =
N
L
(3)
where N is the number of vehicles and L is the maxi-
mum number of vehicles (in units of vehicles per km)
computed as follows:
L =
Lengtho f road
avgvehiclelength + min − gap
(4)
where min−gap is the safe inter-distance between ve-
hicles and the mean speed V
f
for edges ed
i
where Ed
is presented as follow:
ED = {ed
1
, ed
2
, ed
3
......ed
n
} (5)
The mean speed is presented as follows:
V
f
=
1
N
N
∑
n=1
v
n
(6)
In fact V
f
is the mean of speeds of vehicles passing
an edge ed
i
.
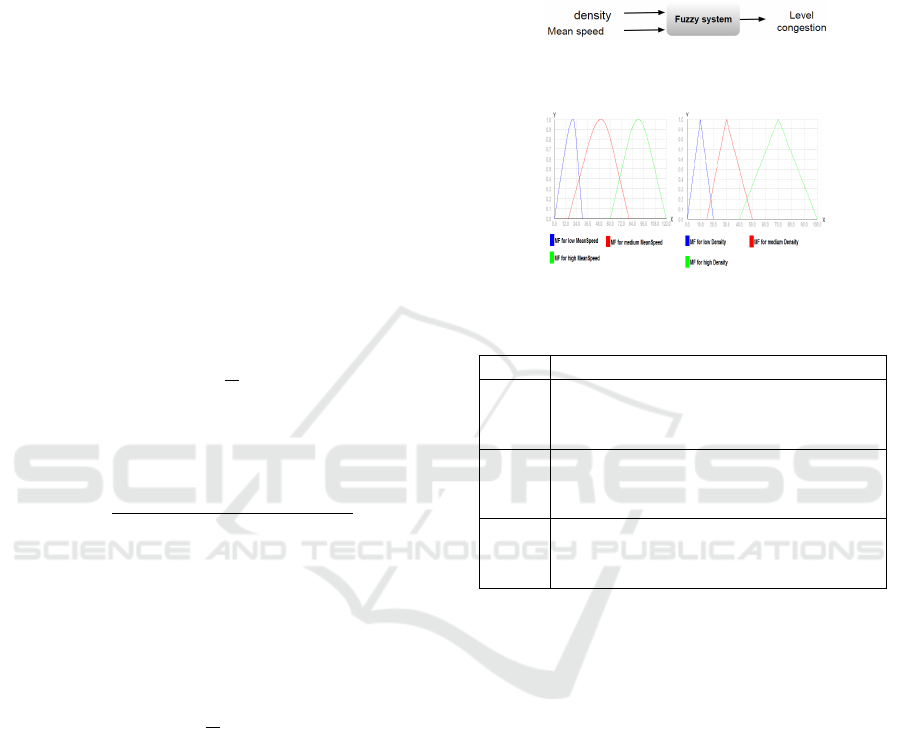
C. Congestion Detection
Based on the computed traffic density and mean
speed received by the AMV, the RAP deploys
dynamic rules to manage congestion effectively. The
RAP aims to detect congestion levels in the RSU
coverage area using an Interval Type-1 Fuzzy Logic
model (IT1FL). Figure (Fig. 4) illustrates the model
with inputs including maximum speed in ed
i
[0,
120] and the density of ed
i
[0,100], each possessing
’low,’ ’medium,’ and ’high’ membership functions.
Complementing this, Figure (Fig. 5) showcases
fuzzified input membership functions, providing a
visual representation of input membership degrees.
We generate the graphical input memberships within
the juzzy library (Wagner, 2013). The output of
the fuzzy model is the level of congestion in ed
i
[0,1] which has three membership functions ‘light’,
‘moderate’, and ‘heavy’.
Figure 4: IT1FL model for rule generation of one evalua-
tion.
Figure 5: Fuzzified Input membership functions.
Table 2: Rules of the IT1F proposed model.
Rules Fuzzy Rules
1 IF Density is medium AND Mean
Speed is high THEN Level Congestion
is heavy.
2 IF Density is medium AND Mean
Speed is medium THEN Level Conges-
tion is moderate
3 IF Density is medium AND Mean
Speed is low THEN Level Congestion
is light
Then, the RAP will define the corresponding rules
to the detected congested edges mentioned in (tab. 2).
In a practical scenario, these rules guide the
RAP in assessing congestion. Once congested edges
are identified, messages are dispatched to both the
AMBC and AMVs. The AMV, in turn, notifies
subscribed DAs about the congestion, fostering
informed decision-making among drivers.
D. Rule Generation
In the rule generation phase, our approach combines
insights from congestion detection and Mean Travel
Time (MTT) analysis to formulate a dynamic set
of rules for efficient traffic management. Using
congestion data from the RAP, the AMBC identifies
congested edges, categorizing them by severity.
Simultaneously, MTT serves as a metric to assess
overall travel time performance, establishing thresh-
olds (δ) for acceptable travel times in different
scenarios. The AMBC receives from the AMV
responsible for the warning event edge position (
position) about the density (k). Once responding,
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
424

The AMBC computes MTT every interval time t
which is synchronized with the AMV interval time
t. We use Greenshield’s model (Banks, 2002) for the
MTT estimation since it proves its efficiency with
well-use by transportation researchers. The idea was
that there is a relation between the density and the
speed on an edge. Thus, it is computed as follows:
T
i
=
L
i
V
i
(7)
where
V
i
= V
f
(1 −
K
i
K
jam
) (8)
L
i
is the length or the same edge ed
i
, V
i
is the esti-
mated road speed. K
i
is the traffic density (vehicles
per meter) on ed
i
and K
jam
is the traffic jam density.
The integrated approach dynamically adjusts MTT
thresholds based on congestion severity, ensuring
adaptive decision-making. For instance, heavy
congestion prompts dynamic lane management or
rerouting, while exceeding MTT thresholds trig-
gers actions like suggesting alternative routes. By
combining congestion and MTT-driven rules, our
system achieves comprehensive traffic management,
addressing immediate congestion concerns and
anticipating potential issues based on travel time
trends.
E. Adaptive Decision-Making
The DA receiving the warning service enables drivers
to make informed decisions and adapt their travel
plans accordingly. Thus, it will compute the distance
(distance) between its actual position and the warning
event position as follows:
distance
i j
=
q
(pd
i
− pd
j
)
2
+ (pw
i
− pw
j
)
2
(9)
where pd
i
and pd
j
are the current 2D position of
the driver (pd) and pw
i
and pw
j
are the current 2D
position of the warning (pw) where distance
i
> 0,
and (pd
i
, pd
j
) ̸= (pw
i
, pw
j
). If distance
i j
> β where
is a limit value defined by the system, the DA will get
the alternative routes, if the distance
i j
< β of limit
defined by the system, it will apply imposed rules,
the decision-making of the vehicle is executed by the
following algorithm.
Driver Agent Algorithm
Begin
1. Each DA has an Origin and Destination.
2. While origin != Destination
3. DA i Send parameters to AMV when
entering its covered zone
4. AMV subscribe DA i via its parameters
(id, position, speed, destination) and
deploy the C-ITS application
5. If distance between DA i AND event at
time t > beta
6. Asking the AMV about real-time roads
conditions
7- AMV transmits the message to the AMBC
8- the AMBC send the roads
condition about MTT
9- DAi look for the possible alternative
roads and choose the k-shortest path
10. else Apply imposed rules
End.
4 CASE STUDY: C-ITS ROAD
HAZARD WARNING
To illustrate our proposed model, we choose a C-ITS
road hazard warning service to illustrate an accident
warning as a C-ITS application. It is important to note
here, that the proposed architecture is not specified
for accident warning only, but can also be extensible
with any other C-ITS application. We aim to demon-
strate how to manage traffic information to deliver the
drivers the relevant services.
The significance of addressing accidents becomes ap-
parent when considering statistics such as those pro-
vided by the National Highway
1
Traffic Safety Ad-
ministration, which anticipates a 7.342% increase in
road accident fatalities to 50 per 1 million inhabitants
in the United States in 2022. Similarly, Eurostat
2
re-
ported 42.1 road accident-related fatalities per million
people in 2020. These statistics underscore the im-
pact of accidents on road safety and traffic efficiency,
emphasizing the need for effective solutions. An ac-
cident scenario serves as a challenge to the efficiency
of our approach.
4.1 Simulation
For our simulation scenario, we have chosen to repli-
cate the case study previously described in (Bedogni
et al., 2015), focusing on the city of Bologna (Fig. 6).
As per our architecture, Bologna City is conceptual-
ized as a cluster.
To simulate incidents, such as accidents or road
disruptions, we use the capabilities of SUMO
3
. In-
cidents, in the real world, can encompass collisions,
road works, adverse weather causing slow speeds, or
simply high traffic flows. There are a few options in
SUMO to simulate an accident. In our simulation, we
replicate an accident by instructing a vehicle to stop
1
https://www.nhtsa.gov/
2
https://ec.europa.eu/eurostat
3
https://eclipse.dev/sumo/
Multi-Agent Based Framework for Cooperative Traffic Management in C-ITS System
425
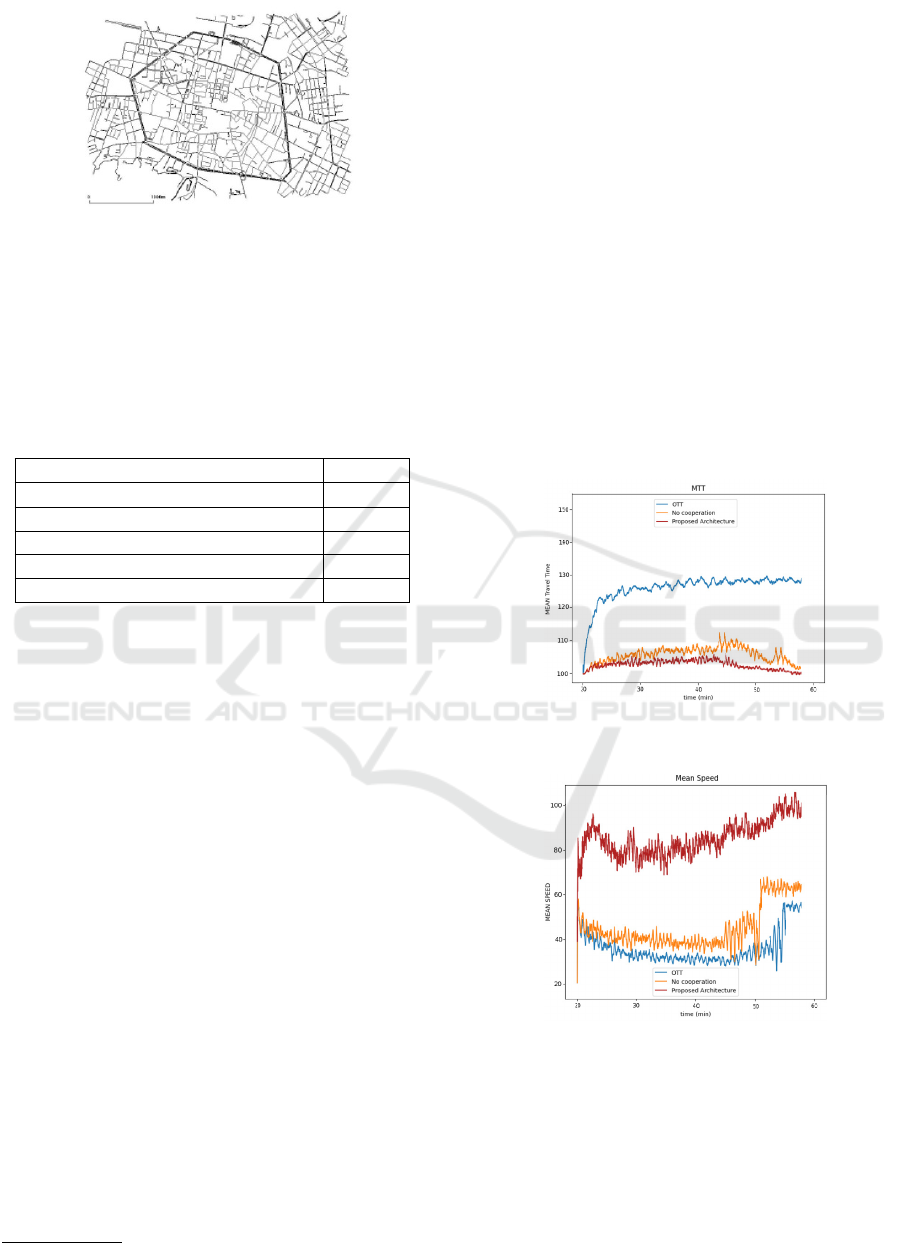
Figure 6: Bologna Map city.
at a defined point along its route and specifying the
duration of the halt. TRACI
4
is an API that facili-
tates real-time interaction between the SUMO inter-
face and the traffic simulation. The simulation runs
for a timestep of 60 minutes. Parameters for this
example are outlined in (tab. 3). Our MAS is im-
Table 3: Maps parameters.
Parameters Value
Network area 25 km
2
.
Total number of road segments 2856
Total number of Traffic lights 99
Total number of junctions 1539
Total number of Vehicles 22000
plemented in the JADE platform (Bellifemine et al.,
2005). We selected the TRASMAPI (Tim
´
oteo et al.,
2010) API due to its capability to enable real-time in-
teraction between MAS and the SUMO interface. It
establishes a higher level of abstraction between the
SUMO API (TRACI) and JADE, facilitating commu-
nication between the two tools via TCP sockets. The
MAS configuration for handling accident warnings
features three designated containers:
• Main Container. Represents the center system,
with one AMBC agent acting as the agent respon-
sible for the Bologna city cluster.
• Infrastructure Container. Encompasses RSUs,
where two associated agents: the AMV and the
RAP function for the operational aspect of an
RSU. The Bologne map includes 5 RSUs
• Urban-Road Container. Contains DAs created
randomly for the simulation scenarios.
4.2 Results and Evaluation
In the experimentation, we are focusing on the strat-
egy proposed for our distributed C-ITS multi-agent
based architecture. When the BC detects an accident,
the first step is to decide for which RSU it will send
4
http://sumo.dlr.de/wiki/TraCI
the rules. Drivers receiving the warning event will
execute the algorithm of the driver agent described in
section 3.2. For the K shortest path, the Dijkstra Algo-
rithm (1959) is integrated into the SUMO simulator.
The simulation output presents several statistics
for each car, each edge, and each lane. We chose the
MTT and the mean speed as metrics in our simula-
tion experiment to evaluate our approach compared
to the Original Traffic Trace (OTT) with no coopera-
tion in the sense that the system is centralized. This
measurement reveals that our approach leads to bet-
ter traffic management and fluid traffic. Figure 7 and
Figure 8 show the efficiency of our proposed archi-
tecture compared to an architecture without the coop-
eration between the agents. The MTT is smaller and
the mean speed is higher in the proposed model than
in the other cases which proves how our architecture
is beneficial to enhance traffic conditions. The results
show how our architecture and placement strategy can
impact the MTT and mean speed.
Figure 7: Vehicles mean travel time (from origin to destina-
tion).
Figure 8: Mean Speed.
5 CONCLUSIONS
In this paper, we propose a generic distributed multi-
agent architecture to support C-ITS systems. Our
main focus is to manage traffic cooperatively in an ur-
ban road environment. MAS in our approach provides
distributed traffic monitoring and control as well as a
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
426

better management of services. We also integrated
the IT1FL model as a decision-making knowledge
representation to detect congestion situations due to
warning events. It enables handling and modeling un-
certainty and makes our system more robust in real-
world scenarios. To prove the validation of our ap-
proach, we elaborate on a scenario of an accident
warning. Our approach outperforms mean travel time
and mean speed. There are also other possible re-
search directions to improve the proposed architec-
ture. Additional scenarios are needed to improve the
evaluation such as considering more data sets and per-
formance metrics (eg. CO2 emission). We can also
include the prediction of unplanned events by using
learning methods. In this case, communication at the
C-ITS sub-system to identify such a service can be
avoided by detecting an event before it even happens.
Besides, extending our proposal by considering the
security aspect is another challenging and crucial re-
search direction.
REFERENCES
Aloui, A., Hachicha, H., and Zagrouba, E. (2021). A mobile
agent-based framework to monitor and manage inter-
operability of c-its services in vehicles. In Agents and
Multi-Agent Systems: Technologies and Applications
2021: Proceedings of 15th KES International Confer-
ence, KES-AMSTA 2021, June 2021, pages 89–101.
Springer.
Banks, J. H. (2002). Introduction to transportation engi-
neering, volume 21. McGraw-Hill New York.
Bedogni, L., Gramaglia, M., Vesco, A., Fiore, M., H
¨
arri, J.,
and Ferrero, F. (2015). The bologna ringway dataset:
Improving road network conversion in sumo and val-
idating urban mobility via navigation services. IEEE
Transactions on Vehicular Technology, 64(12):5464–
5476.
Belbachir, A., El Fallah-Seghrouchni, A., Casals, A., and
Pasin, M. (2019). Smart mobility using multi-agent
system. Procedia Computer Science, 151:447–454.
Bellifemine, F., Bergenti, F., Caire, G., and Poggi, A.
(2005). Jade—a java agent development framework.
Multi-agent programming: Languages, platforms and
applications, pages 125–147.
Dajsuren, Y., Karkhanis, P., Kadiogullary, D., and Fuen-
frocken, M. (2017). C-mobile d3. 1 reference archi-
tecture. Technical report, Technical report.
Davis, S. C. and Boundy, R. G. (2021). Transportation en-
ergy data book: Edition 39. Technical report, Oak
Ridge National Lab.(ORNL), Oak Ridge, TN (United
States).
Devangavi, A. D. and Gupta, R. (2017). Adaptive conges-
tion controlled multipath routing in vanet: A multia-
gent based approach. International Journal of Agent
Technologies and Systems (IJATS), 9(1):43–68.
Gu
´
eriau, M., Armetta, F., Hassas, S., Billot, R., and
El Faouzi, N.-E. (2016). A constructivist approach for
a self-adaptive decision-making system: application
to road traffic control. In 2016 IEEE 28th Interna-
tional Conference on Tools with Artificial Intelligence
(ICTAI), pages 670–677. IEEE.
Hamdani, M., Sahli, N., Jabeur, N., and Khezami, N.
(2022). Agent-based approach for connected vehicles
and smart road signs collaboration. Computing and
Informatics, 41(1):376–396.
Hamidi, H. and Kamankesh, A. (2018). An approach to
intelligent traffic management system using a multi-
agent system. International Journal of Intelligent
Transportation Systems Research, 16:112–124.
Li, S., Edwards, S., Isik, M. O., Zhang, Y., and Blythe,
P. T. (2022). Qualitative examination of cooperative-
intelligent transportation systems in cities to facilitate
large-scale future deployment. Sensors, 22(21):8423.
Naderi, M., Mahdaee, K., and Rahmani, P. (2023). Hi-
erarchical traffic light-aware routing via fuzzy rein-
forcement learning in software-defined vehicular net-
works. Peer-to-Peer Networking and Applications,
16(2):1174–1198.
Perez-Murueta, P., G
´
omez-Espinosa, A., Cardenas, C., and
Gonzalez-Mendoza Jr, M. (2019). Deep learning sys-
tem for vehicular re-routing and congestion avoid-
ance. Applied Sciences, 9(13):2717.
Teixeira, M., d’Orey, P. M., and Kokkinogenis, Z.
(2020). Simulating collective decision-making for
autonomous vehicles coordination enabled by vehic-
ular networks: A computational social choice per-
spective. Simulation Modelling Practice and Theory,
98:101983.
Tim
´
oteo, I. J., Ara
´
ujo, M. R., Rossetti, R. J., and Oliveira,
E. C. (2010). Trasmapi: An api oriented towards
multi-agent systems real-time interaction with multi-
ple traffic simulators. In 13th International IEEE Con-
ference on Intelligent Transportation Systems, pages
1183–1188. IEEE.
Wagner, C. (2013). Juzzy-a java based toolkit for type-2
fuzzy logic. In 2013 IEEE Symposium on Advances in
Type-2 Fuzzy Logic Systems (T2FUZZ), pages 45–52.
IEEE.
Zarari, C., Balbo, F., and Ghedira, K. (2018). Agent execu-
tion platform dedicated to c-its. Procedia Computer
Science, 126:821–830.
Zouari, M., Baklouti, N., Kammoun, M. H., Ayed, M. B.,
Alimi, A. M., and Sanchez-Medina, J. (2021). A
multi-agent system for road traffic decision making
based on hierarchical interval type-2 fuzzy knowledge
representation system. In 2021 IEEE International
Conference on Fuzzy Systems (FUZZ-IEEE), pages 1–
6. IEEE.
Multi-Agent Based Framework for Cooperative Traffic Management in C-ITS System
427
