
Economic Sustainability in Last-Mile Drone Delivery Problem with
Fulfillment Centers: A Mathematical Formulation
Maria Elena Bruni
1 a
, Sara Khodaparasti
2 b
and Guido Perboli
2 c
1
Department of Mechanical, Energy and Management Engineering, University of Calabria, Cosenza, Italy
2
Department of Management and Production Engineering, Polytechnic University of Turin, Turin, Italy
Keywords:
Last-Mile Delivery, Energy Consumption, Fulfillment Center, Mixed Integer Program.
Abstract:
This study is motivated by the increasing growth in the competitive e-commerce market where on-line
business-to-customer retailers, seeking for cost-efficient and timely delivery services, are persuaded to adopt
a drone-based delivery system against the traditional terrestrial one. Recently, the drone-aided delivery ser-
vices have significantly been eased, thanks to the development of fulfilment centers, as aerial base stations
monitoring and arranging back-and-forth drone trips between the fulfilment centers and customers’ sites that
also provide the retailers with services such as package handling, restocking, and drone recharge. Obviously,
adopting a drone-based delivery system incurs various expenses: besides drone recharge, maintenance, and
energy consumption costs, the usage cost for fulfillment centers, namely tariff, should be paid by the retailers
to the FC manager. This study aims to address the economic sustainability of a drone-aided delivery system
with fulfillment centers and to provide the retailer with an optimal delivery plan maximizing his profit. This
could eventually provide a stable platform for new and small-sized business-to-customer retailers trying to
survive in such a competitive market and to promote the use of drone fulfillment centers.
1 INTRODUCTION
The boom in e-commerce and the tremendous growth
in on-line retail have created intense competition
among new and small-sized Business-to-Customer
(B2C) companies striving to meet customer expec-
tations in terms of cost-efficient and timely delivery.
This has provided potentials for the development of e-
logistics services suggesting drone-based delivery so-
lutions (Pani et al., 2020). The increasing interest to-
wards drone-based delivery services, coming from the
evident environmental impact, cost-inefficiency and
long delivery time of terrestrial vehicles, has chal-
lenged logistics stakeholders to resort to more in-
novative and sustainable delivery solutions as Un-
manned Aerial Vehicles (UAVs) or drones. The Ama-
zon Prime Air project, Google Wing projects, Deutch
Post DHL, and JingDong (Liu et al., 2021) are only
a few examples of this successful and ambitious idea
of introducing drone-aided delivery into the logistic
sector.
a
https://orcid.org/0000-0002-3152-5294
b
https://orcid.org/0000-0003-3858-2571
c
https://orcid.org/0000-0001-6900-9917
Recently, Amazon announced that by the end of
2024, the Amazon Prime Air will be expanded to
Italy, UK, and other cities in the United States (Ama-
zon, 2023), integrating in such a way, drone deliveries
into Amazon’s existing fulfillment center network.
Fulfillment Centers (FC) are specialized distribu-
tion centers that facilitate the drone integration into
delivery systems. These drone base stations offer
landing, takeoff, drone recharge, and package han-
dling services to on-line retailers. Obviously, small
B2C retailers cannot afford possessing such costly in-
frastructures. FC managers provide the service at a
cost (also referred to as tariff ) per drone, that might
also be time-varying. Each delivery has an associated
revenue, and a set of preferred time intervals. The
variation in tariffs and revenues is related to the dy-
namic nature of the problem: tariffs reflect changes
in workforce prices, whilst revenues vary depending
on the type of shipping (standard, express) and by
the customer’s preferences. This suggests the use
of a multi-period framework (instead of a static one)
where the decisions can be adapted over time in order
to capture such variations (Bakker and Nickel, 2024;
Khodaparasti et al., 2018). In addition, the FC tar-
iffs affect the economic sustainability of the drone-
382
Bruni, M., Khodaparasti, S. and Perboli, G.
Economic Sustainability in Last-Mile Drone Delivery Problem with Fulfillment Centers: A Mathematical Formulation.
DOI: 10.5220/0012464100003639
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th International Conference on Operations Research and Enterprise Systems (ICORES 2024), pages 382-389
ISBN: 978-989-758-681-1; ISSN: 2184-4372
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

delivery system and the profitability of the retailer
business. Recent researches showed the potentials
for the establishment of new multi-level FCs to facili-
tate last-mile drone delivery services across European
cities (Aurambout et al., 2022).
The appealing features of drone-based delivery
solutions in terms of low environmental implications
(CO
2
footprint and noise pollution) have somehow
shifted the focus of practitioners and operational re-
searchers to its green sustainability, ignoring or even
downplaying the importance of addressing economic
viability measures in delivery systems.
The present study aims to address the economic
sustainability of drone-based delivery services with
FCs through the design of an efficient delivery sys-
tem operating on a daily basis, where drone-specific
features, as energy consumption and recharge time,
along with customers’ preferences in terms of deliv-
ery time are properly incorporated. To design such
a holistic delivery service, we adopt a multi-period
framework that enables us to capture the inherent dy-
namicity of problem in terms of time-variant tariffs
and delivery revenue.
We should highlight that the economic sustain-
ability of system is highly affected by the retailer de-
cisions on how (questioning the transport mode) and
when the delivery plans are scheduled. With the aim
of maximizing the retailer total profit over a short-
term planning horizon of one working day, we present
the optimal delivery plan specifying i) the transport
mode and the delivery schedule for each customer; ii)
the deployment schedule for each drone; iii) the set
of FCs used to host the deployed drones. We also in-
vestigate the impact of different tariff setting policies
on the system economic viability providing the logis-
tics companies/the FC manager with managerial in-
sights on how the appropriate share of FCs resources
among different retailers could help to establish a sta-
ble platform for e-logistics businesses. In this way,
we address the economic viability and sustainability
of drone-deliveries with FCs in B2C logistics, inves-
tigating the effect of tariffs on both the retailer’s rev-
enue and the sustainability of delivery system.
The rest of the paper is organized as follows. Sec-
tion 2 presents a review on pure-drone delivery prob-
lem in the literature pointing up the gaps. Section
3 describes the problem and presents the mathemat-
ical formulation. Section 4 is devoted to the compu-
tational experiments conducted on a real case study
for the Portland city adapted from (Chauhan et al.,
2019) and the discussion on managerial insights. Fi-
nally, Section 5 provides the concluding remarks and
potential directions for future research.
2 LITERATURE REVIEW
Large part of the literature on UAV-based logistics
systems is devoted to contributions on multi-modal
delivery models where a fleet of drones and au-
tonomous trucks cooperate to serve customers (Bruni
et al., 2022; Dell’Amico et al., 2022; Moshref-Javadi
and Winkenbach, 2021). However, the present con-
tribution falls in the class of pure-play drone-based
models where deliveries are handled just by drones.
The literature on pure drone delivery problem
is categorized in two main streams depending on
whether drones perform multi-visit or single visit
tours. The multi-visit case involves routing deci-
sions where drones can visit multiple customers per
trip (Torabbeigi et al., 2020).This, of course, limits
the applicability of proposed models to cases wherein
the drone payload capacity and battery charge al-
low multiple deliveries per trip and requires to ac-
count for load-dependent energy consumption rates in
drone battery. Following this stream, (Dorling et al.,
2016) and (Cheng et al., 2020) presented multi-visit
drone delivery models where the energy consumption
in drone battery is explicitly modeled. (Bruni et al.,
2023b) studied a routing problem for last-mile drone
delivery with shared FCs and homogeneous parcel
weight where the objective is to minimize the total
travel cost (Bruni et al., 2023b). The authors model
the energy consumption rates considering internal and
external factors that affect energy consumption, in-
cluding drone-specific features (such as the number
of rotors, the drone frame and battery mass), the envi-
ronmental factors (air density and gravitational force),
and the mass of order(s) carried by drone. There are
also other contributions on multi-visit drone delivery
problem that account for energy consumption rates
under the travel time uncertainty that is not the fo-
cus of present paper, and therefore, we refer the inter-
ested reader to (Bruni and Khodaparasti, 2022a; Bruni
et al., 2023a; Bruni and Khodaparasti, 2022b).
As mentioned earlier, the limited drone flight
endurance, payload and battery capacity makes the
adoption of routing plans in many drone delivery ap-
plications impractical. On the other hand, the sin-
gle visit drone delivery case where each drone per-
forms multiple trips delivering the order of one sin-
gle customer per trip is more realistic and practical,
as supported by many contributions in the literature
(Chauhan et al., 2019; Figliozzi, 2020; Pani et al.,
2020; Dukkanci et al., 2021).
Following the single visit drone delivery context,
we may recognize that some contributions model the
energy consumption rates in drone battery as a lin-
ear function in terms of drone payload and travel time
Economic Sustainability in Last-Mile Drone Delivery Problem with Fulfillment Centers: A Mathematical Formulation
383

(Chauhan et al., 2019; Chowdhury et al., 2017; Zhu
et al., 2022), while some other studies do not account
for energy consumption (Golabi et al., 2017; Pulver
and Wei, 2018).
To the best of our knowledge, only (Dukkanci
et al., 2021) introduced an explicit calculation of the
energy consumption as a nonlinear function of the
drone speed in a single visit drone delivery prob-
lem where drones are first transported by trucks to
the proximity of customers and then perform multi-
ple back-and-forth trips between the trucks and cus-
tomers’ locations to deliver orders.
Another important issue, mostly ignored in the
drone-delivery context, is the battery recharge. In
fact, most contributions do not account for it and for
the charging time spent. For example in (Chauhan
et al., 2019), the battery recharge is not taken into ac-
count and it is assumed that the drone batteries are
recharged overnight or in-between planning periods.
In the present study, we bridge the gap in the liter-
ature by designing a multi-period drone-based deliv-
ery system with FCs, focusing on the economic sus-
tainability and viability of the delivery system. We
provide the retailer with optimal delivery schedules
for a short-term planning horizon where the realis-
tic assumptions on energy consumption in drone bat-
tery, the heterogeneity of fleet, the time required to
recharge batteries after each depletion, the customer
preferences in terms of delivery time, and the time-
dependency of parameters are directly incorporated.
3 PROBLEM DESCRIPTION AND
MATHEMATICAL
FORMULATION
The last-mile drone delivery problem with FCs is de-
scribed as follows. The FCs’ owner manages a set
of existing FCs as the distribution centers special-
ized for drone usage where drones are loaded with
customer packages, launched and dispatched to the
customers’ locations, where the package is left at the
doorstep, and are then retrieved back for the next de-
livery. The FCs offer different services such as re-
stocking and package handling to the retail companies
and are capacitated. The retail companies, consider-
ing the FCs’ usage costs decide on how (by drone or
traditional transport vehicles) and when to plan the
customer deliveries. The retail company can consider
an external delivery service as an alternative option to
deliver some orders. The external service is usually
performed by a terrestrial vehicle that is highly expen-
sive, compared to the drone-delivery option, imposing
a penalty cost to the retailer that loses the potential
profit of that delivery request.
We should note that each customer has prefer-
ences in terms of delivery time, and thus, can be vis-
ited only during one of his preferred time periods.
The retail company’s main goal is to maximize the
total profit (expressed in terms of total revenue mi-
nus total costs) gained from delivering orders within
the preferred delivery times, specifying the transport
mode for each single order (by drone or the terres-
trial service) and the delivery schedules at each time
slot. The total cost includes the FC’s usage cost, the
delivery cost, and the penalty cost for customers not
being served by drones. The usage cost associated to
a FC depends on both the time period at which the
FC is used and its location, raising the issue of opti-
mally select the FCs. The delivery cost includes the
drone usage and maintenance costs plus the routing
expenses monetized in terms of energy consumption
in drone battery. The retail company owns a set of
heterogeneous drones (denoted by U and indexed by
u) and should deliver the orders of a set customers in
I where the location of customer i and its parcel mass
d
i
(in kg) are already known. Each customer has pre-
ferred time interval(s) to receive the delivery. The set
of preferred delivery time for customer i is denoted
by E(i) ⊂ H where H denotes the set of time slots
(periods).
In fact, we consider a short-term planning horizon
of one working day discretized into different time pe-
riods, with the same length (usually one hour), to cap-
ture the dynamicity of the problem in terms of time-
varying FC tariffs, customer preferences for deliv-
ery time, and time-dependent delivery revenues. We
should highlight that the hourly granularity is consis-
tent with the average time required to recharge a typ-
ical drone battery (Leslie, 2024).
The representative retail company seeks maximiz-
ing the total profit expressed in terms of revenue mi-
nus the delivery costs. The retail company decides
upon the selection of FCs over different time peri-
ods, the allocation of drones to used FCs, the delivery
schedule for each drone meeting the customers prefer-
ences in terms of delivery time, and finally the choice
of customers to be served by the alternative vehicle.
In summary, the problem’s main assumptions are
listed as follows:
• A set of capacitated FCs are available to host the
drones
• A set of heterogeneous fully charged drones is
available
• The planning horizon is divided into a set of dis-
crete time slots
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
384

• Each drone can use only one FC throughout the
entire planning horizon
• Each customer has preferences in terms of deliv-
ery time, limiting its visit to specific time periods
• At the beginning of a typical time period, each
drone, if deployed, is loaded with a single cus-
tomer’s order and is launched from its host FC,
delivers the order to the customer’s location and
is retrieved at the FC
• Drones are allowed to perform multiple single-
visit trips within the same time period to serve
multiple customers, as long as the drone battery
is not depleted
• Battery recharge is allowed only at FCs and if the
battery needs to be recharged, the drone spends
the subsequent time period in the FC and therefore
cannot be deployed
Figure 1 illustrates the delivery scheme for a typical
drone-based delivery problem with FCs.
Figure 1: Scheme of the delivery system: A delivery exam-
ple with 3 FCs, 4 drones, and 10 customers.
The problem notation is presented in Table 1.
Table 1: Notation for the mathematical model.
Sets and Indices
I set of customers indexed by i
D set of FCs indexed by j
H set of time slots indexed by h
U set of drones indexed by u
E(i) ⊆ H set of preferred delivery time slot for customer i
Parameters
p
h
j
usage cost (tariff) for FC j at time slot h
λ penalty cost for using external delivery service
φ
h
i
revenue for the order delivery of customer i at time slot h by a drone
e
u
ji
energy consumption of drone u across the path between FC j and customer i
e
u
i j
energy consumption of drone u across the path between customer i and FC j
E
u
battery capacity of drone u
K
h
j
capacity of FC j (in terms of total number of deliveries) at time slot h
c
u
i j
delivery cost of drone u to deliver order of customer i from FC j
Decision variables
y
h
u j
binary variable takes 1 if drone u is deployed from FC j at
time slot h; and 0 otherwise
x
uh
i j
binary variable takes 1 if order of customer i is delivered at time h by
drone u from FC j; and 0 otherwise
w
i
binary variable takes 1 if customer i is served by express delivery
service; and 0 otherwise
α
u j
binary variable takes 1 if drone u assigned to FC j is deployed at least in
one time slot
The mathematical formulation is cast as follows:
max :
∑
i∈I
∑
j∈D
∑
u∈U
∑
h∈H
φ
h
i
x
uh
i j
−
∑
j∈D
∑
u∈U
∑
h∈H
p
h
j
y
h
u j
+
∑
i∈I
∑
j∈D
∑
u∈U
∑
h∈H
c
u
i j
x
uh
i j
+
∑
i∈I
λw
i
(1)
∑
i∈I
∑
u∈U
x
uh
i j
≤ K
h
j
j ∈ D, h ∈ H (2)
y
h
u j
≤ α
u j
u ∈ U, j ∈ D, h ∈ H (3)
∑
j∈D
α
u j
≤ 1 u ∈ U (4)
∑
i∈I
(e
u
ji
+ e
u
i j
)x
uh
i j
≤ E
u
y
h
u j
u ∈ U, j ∈ D, h ∈ H (5)
y
h
u j
+ y
(h+1)
u j
≤ 1 u ∈ U, j ∈ D, h ∈ H, h ̸= |H| (6)
∑
j∈D
∑
u∈U
∑
h∈H
x
uh
i j
+ w
i
= 1 i ∈ I (7)
∑
j∈D
∑
u∈U
x
uh
i j
= 0 i ∈ I, h ∈ H \ E(i) (8)
x
uh
i j
∈ {0,1} i ∈ I, u ∈ U, j ∈ D, h ∈ H (9)
y
h
u j
∈ {0,1} u ∈ U, j ∈ D, h ∈ H (10)
w
i
∈ {0,1} i ∈ I (11)
The objective function (1) represents the total profit of
the retail company expressed in terms of the revenue
minus tariffs, delivery and penalty costs. Constraints
(2) set an upper bound on the total number of deliv-
eries performed from each FC during each time slot.
Constraints (3) show the relation between variables α
and y. Constraints (4) ensure that if a drone is de-
ployed at least once from a FC, it should stay at that
specific FC for the whole planning horizon, and thus,
avoiding the unnecessary reallocation of drones be-
tween different FCs. Constraints (5) model the drone
energy consumption over multiple trips, ensuring that,
the total energy consumption over the back-and-forth
trips of each time period is below the battery capac-
ity. As said earlier, each drone could perform multi-
ple back-and-forth trips between its host FC and dif-
ferent customers’ sites within the same time period,
if the battery is not depleted. Constraints (6) imply
that each drone can be deployed only once during any
two subsequent time slots, imposing one-time slot gap
between consecutive drone deployments, as the time
required for battery recharge.
Constraint (7) guarantee that each customer’s or-
der is delivered either by a drone or by the exter-
nal service. Constraints (8) are related to the cus-
tomer’s delivery time preferences that prevent deliver-
ies within undesirable time slots. Finally, constraints
(9)-(11) represent the nature of variables.
Following (Dorling et al., 2016), the energy con-
sumption (in Watt-hours, Wh) is expressed as a non-
linear function in terms of drone payload capacity,
frame and battery mass, and the travel time. The en-
Economic Sustainability in Last-Mile Drone Delivery Problem with Fulfillment Centers: A Mathematical Formulation
385
ergy consumption for drone u flying from FC j to lo-
cation of customer i with travel time t
u
ji
(in hour) while
carrying the order of customer i with mass of d
i
(in
kg) is expressed as:
e
u
ji
=
s
g
3
2ρξ
u
s
u
(W
u
+ M
u
+ d
i
)
3/2
t
u
ji
(12)
where g is the gravity constant (in N/kg), ρ represents
the fluid density of air (in kg/m
3
), ξ
u
is the area of
spinning blade disc (in m
2
), s
u
is the number of ro-
tors of drone u, and W
u
and M
u
indicate, respectively,
the drone frame and battery mass (in kg). The energy
consumption of drone u that travels back empty is ex-
pressed as
e
u
i j
=
s
g
3
2ρξ
u
s
u
(W
u
+ M
u
)
3/2
t
u
i j
(13)
4 COMPUTATIONAL
EXPERIMENTS
In this Section, we test the efficiency and the validity
of the proposed model. In particular, we report the
results of a real case study for drone-based last-mile
delivery in Portland city (Chauhan et al., 2019). The
input data and the problem size were slightly mod-
ified to fit the characteristics of drone delivery with
FCs. To be more precise, we first solved a maximum
covering model, considering the original case study
with 122 customer locations and 104 potential FCs,
to determine ten potential FCs and the largest set of
customers that can be served by a fleet of ten Alta 8
drones and the following features: battery capacity of
E = 0.355 kWh, the frame and battery mass of, re-
spectively, W = 6.2 kg and M = 2.8 kg, the payload
capacity of 9.1 kg, with s = 8 rotors and ξ = 1.204
m
2
. Also, the fluid density of air is set to ρ = 0.1256
kg/m
3
and g = 9.81 N/kg. This reduced the set of cus-
tomers to 61, for which we set the same order mass
values as reported in the original case study (Chauhan
et al., 2019). We assume a short-term planning hori-
zon of a typical working day from 8 AM to 4 PM, split
into eight time periods, each with one-hour length.
This granularity level is also consistent with the av-
erage recharge time for an Alta 8 drone.
The preferred delivery times of each customer
were generated randomly considering that each cus-
tomer can be served during 3 to 6 different time slots.
We also set the upper bound K
h
j
= 5 for the maxi-
mum number of back-and-forth trips operated from
FCs during each period. The delivery revenues (in
dollars) were generated randomly following the uni-
form distribution U(8,20). All the data about the
drone delivery costs and external delivery costs were
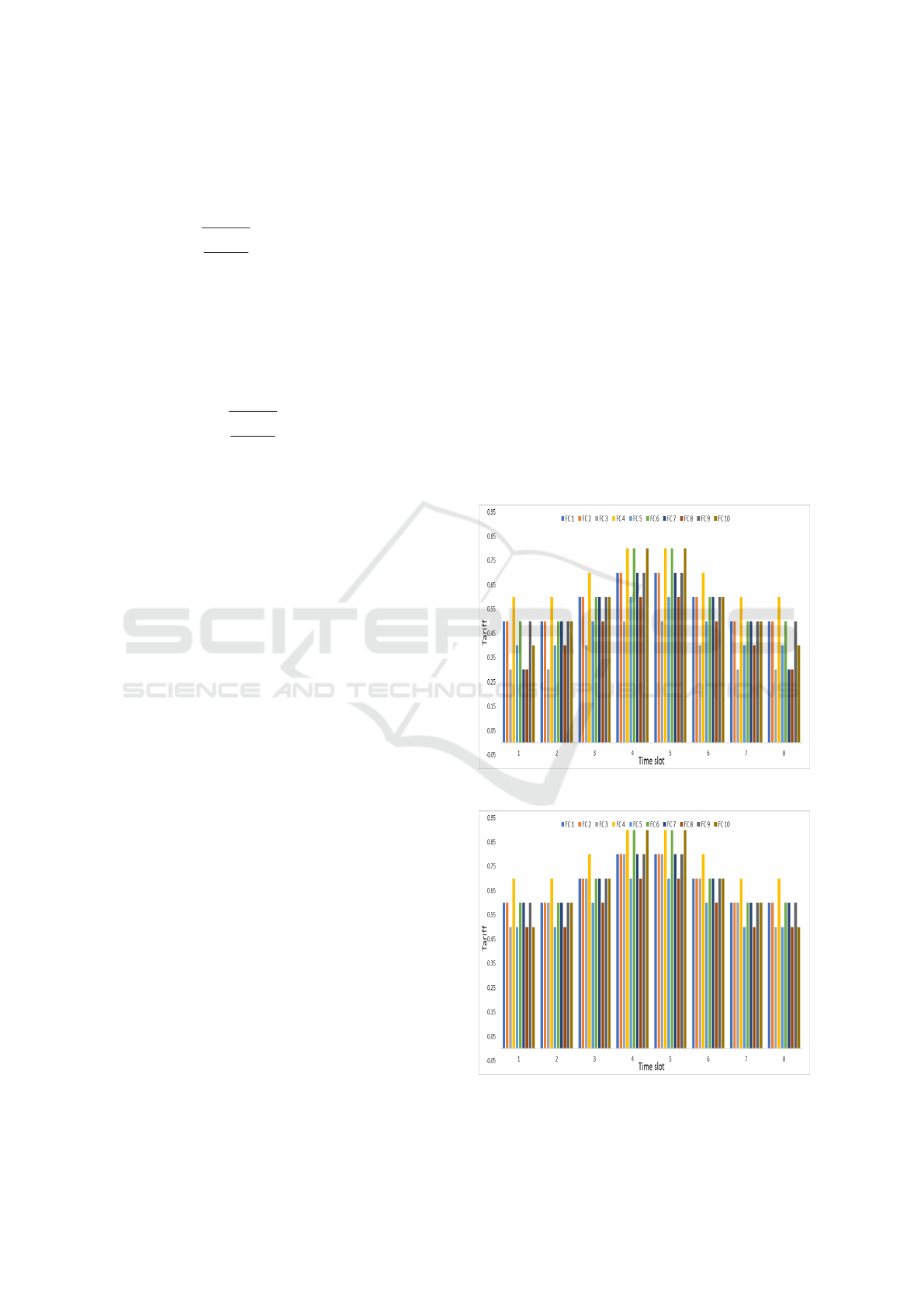
taken from (French, 2017). Finally, for the FC tariffs,
we considered a general pricing rule where the forth
and fifth time slots (from 11 AM to 1 PM) have the
highest tariffs, followed by the third, second and first
periods. The sixth, seventh and eighth time slots have,
respectively, the same tariffs as the third, second and
first ones.Under this general rule, we generated three
different scenarios; in the first two scenarios, tariffs
are time-dependent and the third scenario is a time-
invariant case. In Scenarios I and II, the FCs manager
sets, respectively, low and high tariff rates randomly
generated from [0.3, 0.8] and [0.5, 0.9] rounded to one
decimal digit. In Scenario III, the FCs manager set
time-invariant tariffs that are the same for each FC
throughout the planning horizon. Such tariffs for each
FC are calculated as the maximum value over the av-
erage of the tariffs under Scenarios I and II.
Figures 2-4 display the tariffs under each scenario.
Figure 2: Time-dependent tariffs: Scenario I.
Figure 3: Time-dependent tariffs: Scenario II.
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
386
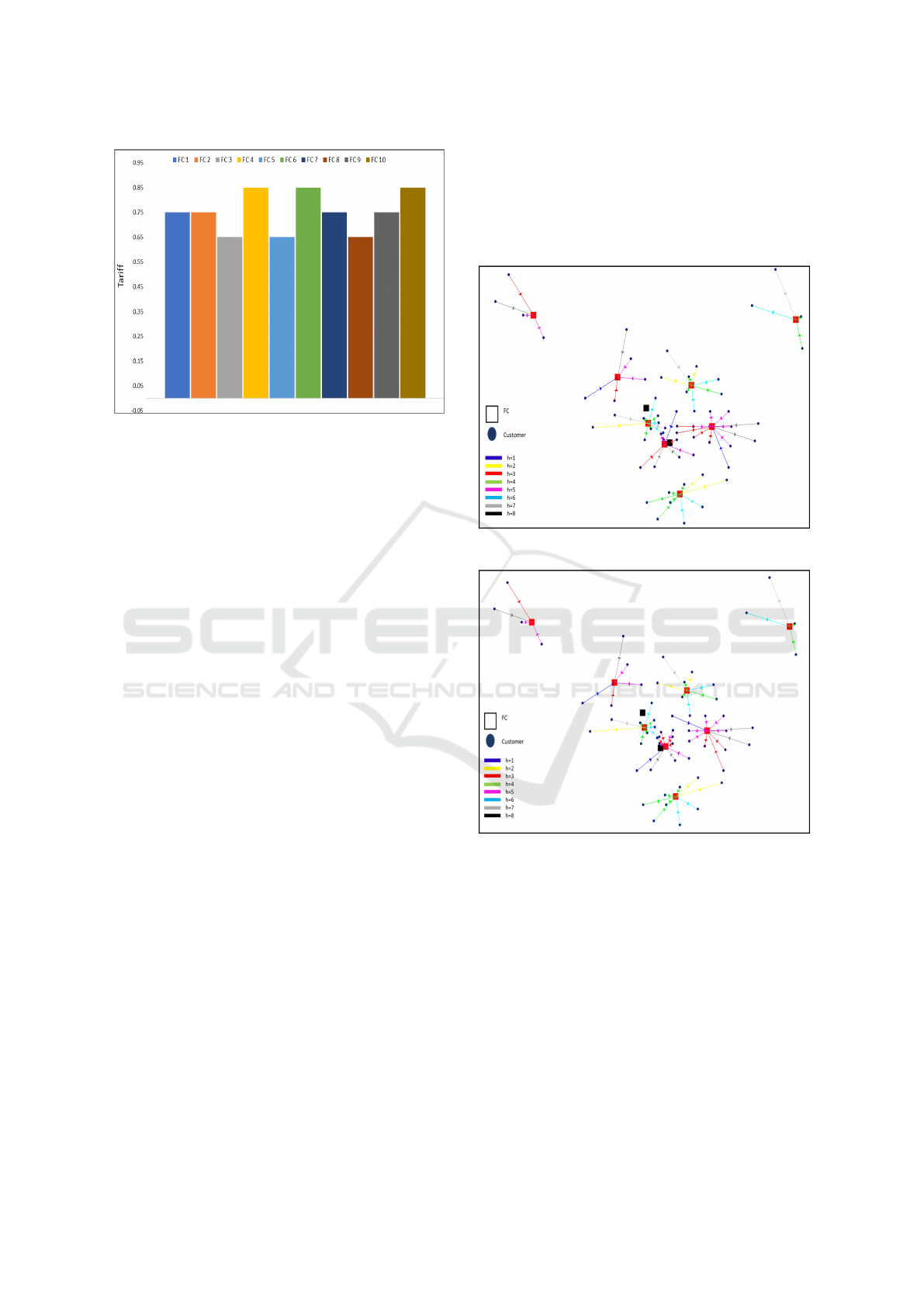
Figure 4: Time-invariant tariffs: Scenario III.
All the experiments were run on an Intel Core i7-
10750H, with 2.60 GHz CPU and 16 GB RAM work-
ing under Windows 11. The model was implemented
in the algebraic modeling language AIMMS 4.79.2.5
The solution times for Scenario I and Scenario II, are
10 and 14 minutes, respectively, followed by 15 min-
utes under Scenario III. First, we comment on the re-
sults for Scenario I, considered as the baseline. Fig-
ure 5 displays the optimal delivery plans. All deliv-
eries performed during the same time period are de-
picted by the same color. The selected FCs are dis-
played in red and the non-selected FCs are shown in
black. As we can see, all the orders are delivered by
the drones and no external service is used. We also
observe quite promising results where the retailer ex-
penses, in terms of FC tariffs and total drone related
and delivery costs, represent only 8% of the total rev-
enue. If the drone-based delivery service with FCs is
not available and all the orders are delivered by the
external service, assuming the same delivery cost of
2.5 $ per order as mentioned in (French, 2017), the
retailer business completely fails. This managerial in-
sight shows the importance of adopting an efficient
delivery system to ensure the economic sustainabil-
ity of business. As for the fleet workload, the results
show that each drone is deployed at least within 3
and at most 4 time slots. Reminding the gap imposed
between two consecutive drone deployments, we de-
duce that the workload between drones is appropri-
ately balanced. In total, drones are deployed 35 times
within different slots, performing from 1 to 4 deliver-
ies per time period in order to complete 61 delivery
trips (on average in each drone deployment, 1.7 cus-
tomers are served).
A percentage of 58% of customers preferred to re-
ceive their orders within 11 AM and 1 PM, and there-
fore, many deliveries had to be scheduled within the
forth and the fifth time slots when the tariffs are the
highest. However, the total tariff cost is only 4% of
the total revenue showing that the designed delivery
system not only meets the customers’ expectations
but also is sustainable with respect to economic cri-
teria.
Figure 5: Optimal solution under scenario I.
Figure 6: Optimal solution under scenario II.
We obtained similar results under scenario II where
the FCs manager increases the tariffs on average by
27% (at least 20% and at most 100%). Of course, the
delivery plans are different and the set of used FCs
is different as shown in Figure 6. The increase in the
tariffs increases the total cost for FC usage up to 20%.
However, the results show that it is still beneficial to
use the FC services and to perform all the deliveries
by using drones. This is also an interesting insight for
the FC manager showing that the retail companies can
tolerate on average 30% increase in the tariff rates and
still prefer to handle all deliveries using FC services.
Of course such tolerance exists only in a monopoly
situation where all the FCs belong to the same owner.
Economic Sustainability in Last-Mile Drone Delivery Problem with Fulfillment Centers: A Mathematical Formulation
387

Figure 7: Optimal solution under scenario III.
Clearly, in a competitive market, the situation can be
more complicated requiring an in-depth investigation.
The optimal delivery plans under Scenario III are
illustrated in Figure 7. As we can see, even when
the FCs manager imposes time-invariant tariffs, we
can still serve all the customers by drones, showing
the reliability of the designed delivery system. As
expected, under Scenario III, the FC usage costs in-
crease by about 8% and 27%, respectively, compared
to Scenario I and Scenario II. To have an idea on the
computational efficiency of the proposed model for
larger instances, we tested the model on a set of cases
with 100, 200, and 500 customers. All the input pa-
rameters for such instances were randomly generated
using the uniform distribution and the minimum and
maximum values reported in the case study. For in-
stance, in the case study the orders’ mass varies from
1.25 to 5 kg, so we set d
i
∼ U(1.25,5), i ∈ I. The
same general rule was followed to generate other in-
put parameters. Under a time limit of 1500 seconds,
only instance with 500 customers were not solved to
optimality where the gap is below 0.68%.
5 CONCLUSIONS
In this study, we addressed the economic sustainabil-
ity and the efficiency of a drone delivery system to
handle the daily last-mile deliveries for small B2C
retailers. The delivery system encompasses a set of
fulfillment centers, as specialized drone stations that
facilitate drone deliveries, and a heterogeneous fleet
of drones where each drone performs multiple back-
and-forth single-visit trips between the FCs and cus-
tomers’ locations to deliver the orders. We formu-
lated the problem as a mixed integer program incor-
porating realistic problem features, like energy con-
sumption in drone battery, customer preferences with
respect to delivery time, and the recharging time for
drone batteries. The experiments carried out on a real
case study showed informative insights on the eco-
nomic sustainability of the designed drone-based de-
livery system, under different tariff setting policies.
Future research should focus on the interplay and in-
teraction between the FCs manager and retailer, to
better frame the impact of tariff setting policies on the
delivery service.
ACKNOWLEDGEMENTS
The second author is supported by PNRR project
NEST ”Network 4 Energy Sustainable Transition” -
PE00000021.
REFERENCES
Amazon (2023). Amazon is launching ultra-fast drone de-
liveries in Italy, the UK, and a third location in the
U.S. https://www.aboutamazon.com/news/operations/
amazon-prime-air-drone-delivery-updates. [Online;
accessed 18-October-2023].
Aurambout, J.-P., Gkoumas, K., and Ciuffo, B. (2022).
A drone hop from the local shop? where could
drone delivery as a service happen in europe and
the usa, and how many people could benefit from
it? Transportation Research Interdisciplinary Per-
spectives, 16:100708.
Bakker, H. and Nickel, S. (2024). The value of the multi-
period solution revisited: When to model time in ca-
pacitated location problems. Computers & Operations
Research, 161:106428.
Bruni, M., Khodaparasti, S., and Moshref-Javadi, M.
(2022). A logic-based benders decomposition
method for the multi-trip traveling repairman prob-
lem with drones. Computers & Operations Research,
145:105845.
Bruni, M. E. and Khodaparasti, S. (2022a). Addressing the
challenges of last-mile: The drone routing problem
with shared fulfillment centers. In ICORES, pages
362–367.
Bruni, M. E. and Khodaparasti, S. (2022b). A variable
neighborhood descent matheuristic for the drone rout-
ing problem with beehives sharing. Sustainability,
14(16):9978.
Bruni, M. E., Khodaparasti, S., and Perboli, G. (2023a).
The drone latency location routing problem under un-
certainty. Transportation Research Part C: Emerging
Technologies, 156:104322.
Bruni, M. E., Khodaparasti, S., and Perboli, G. (2023b). En-
ergy efficient uav-based last-mile delivery: A tactical-
operational model with shared depots and non-linear
energy consumption. IEEE Access, 11:18560–18570.
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
388

Chauhan, D., Unnikrishnan, A., and Figliozzi, M. (2019).
Maximum coverage capacitated facility location prob-
lem with range constrained drones. Transportation
Research Part C: Emerging Technologies, 99:1–18.
Cheng, C., Adulyasak, Y., and Rousseau, L.-M. (2020).
Drone routing with energy function: Formulation and
exact algorithm. Transportation Research Part B:
Methodological, 139:364–387.
Chowdhury, S., Emelogu, A., Marufuzzaman, M., Nurre,
S. G., and Bian, L. (2017). Drones for disaster re-
sponse and relief operations: A continuous approxi-
mation model. International Journal of Production
Economics, 188:167–184.
Dell’Amico, M., Montemanni, R., and Novellani, S. (2022).
Exact models for the flying sidekick traveling sales-
man problem. International Transactions in Opera-
tional Research, 29(3):1360–1393.
Dorling, K., Heinrichs, J., Messier, G. G., and
Magierowski, S. (2016). Vehicle routing problems for
drone delivery. IEEE Transactions on Systems, Man,
and Cybernetics: Systems, 47(1):70–85.
Dukkanci, O., Kara, B. Y., and Bektas¸, T. (2021). Mini-
mizing energy and cost in range-limited drone deliver-
ies with speed optimization. Transportation Research
Part C: Emerging Technologies, 125:102985.
Figliozzi, M. A. (2020). Carbon emissions reductions in last
mile and grocery deliveries utilizing air and ground
autonomous vehicles. Transportation Research Part
D: Transport and Environment, 85:102443.
French, S. (2017). Drone delivery economics:
Are amazon drones economically worth
it? https://www.thedronegirl.com/2017/05/07/
drone-delivery-economics-amazon-drones/.
Golabi, M., Shavarani, S. M., and Izbirak, G. (2017).
An edge-based stochastic facility location problem
in uav-supported humanitarian relief logistics: a
case study of tehran earthquake. Natural Hazards,
87:1545–1565.
Khodaparasti, S., Bruni, M. E., Beraldi, P., Maleki, H., and
Jahedi, S. (2018). A multi-period location-allocation
model for nursing home network planning under un-
certainty. Operations Research for Health Care, 18:4–
15.
Leslie, J. (2024). https://dronesurveyservices.com/
how-do-you-charge-a-drone-battery/.
Liu, D., Deng, Z., Zhang, W., Wang, Y., and Kaisar, E. I.
(2021). Design of sustainable urban electronic grocery
distribution network. Alexandria Engineering Jour-
nal, 60(1):145–157.
Moshref-Javadi, M. and Winkenbach, M. (2021). Applica-
tions and research avenues for drone-based models in
logistics: A classification and review. Expert Systems
with Applications, 177:114854.
Pani, A., Mishra, S., Golias, M., and Figliozzi, M. (2020).
Evaluating public acceptance of autonomous delivery
robots during covid-19 pandemic. Transportation re-
search part D: transport and environment, 89:102600.
Pulver, A. and Wei, R. (2018). Optimizing the spatial loca-
tion of medical drones. Applied geography, 90:9–16.
Torabbeigi, M., Lim, G. J., and Kim, S. J. (2020). Drone de-
livery scheduling optimization considering payload-
induced battery consumption rates. Journal of Intelli-
gent & Robotic Systems, 97:471–487.
Zhu, T., Boyles, S. D., and Unnikrishnan, A. (2022). Two-
stage robust facility location problem with drones.
Transportation Research Part C: Emerging Technolo-
gies, 137:103563.
Economic Sustainability in Last-Mile Drone Delivery Problem with Fulfillment Centers: A Mathematical Formulation
389
