
SAM-Based Detection of Structural Anomalies in 3D Models for
Preserving Cultural Heritage
David Jurado-Rodr
´
ıguez
1 a
, Alfonso L
´
opez
1 b
, J. Roberto Jim
´
enez
1 c
, Antonio Garrido
2 d
,
Francisco R. Feito
1 e
and Juan M. Jurado
1 f
1
Department of Computer Science, University of Ja
´
en, Spain
2
Department of Cartographic, Geodetic and Photogrammetric Engineering, University of Ja
´
en, Spain
Keywords:
3D Modeling, Artificial Intelligence, Cultural Heritage Protection, Drones.
Abstract:
The detection of structural defects and anomalies in cultural heritage emerges as an essential component to
ensure the integrity and safety of buildings, plan preservation strategies, and promote the sustainability and
durability of buildings over time. In the search to enhance the effectiveness and efficiency of structural health
monitoring of cultural heritage, this work aims to develop an automated method focused on detecting unwanted
materials and geometric anomalies on the 3D surfaces of ancient buildings. In this study, the proposed solution
combines an AI-based technique for fast-forward image labeling and a fully automatic detection of target
classes in 3D point clouds. As an advantage of our method, the use of spatial and geometric features in the
3D models enables the recognition of target materials in the whole point cloud from seed, resulting from
partial detection in a few images. The results demonstrate the feasibility and utility of detecting self-healing
materials, unwanted vegetation, lichens, and encrusted elements in a real-world scenario.
1 INTRODUCTION
The importance of preserving architectural heritage
goes beyond a simple historical and cultural obliga-
tion; it represents a fundamental responsibility to-
wards future generations. Identifying and addressing
structural flaws and anomalies in historic buildings
early on is a fundamental pillar in ensuring the in-
tegrity and longevity of these monuments over time.
Thus, the proposal of methodologies to efficiently as-
sess the preservation of heritage and prevent future
incidents involves a promising field of research.
These methodologies can greatly benefit from ex-
ploiting feature patterns extracted from 3D models
and multi-sensory datasets. In this context, Visual
Computing plays a crucial role in 3D building in-
spection through the development of computer vision
methods that are applied to interpret, represent, clas-
sify, summarize, comprehend, and analyze content re-
lated to cultural heritage. These algorithms can be
employed to automatically detect anomalies or de-
a
https://orcid.org/0000-0003-2408-4926
b
https://orcid.org/0000-0003-1423-9496
c
https://orcid.org/0000-0002-1233-2294
d
https://orcid.org/0000-0002-6479-2698
e
https://orcid.org/0000-0001-8230-6529
f
https://orcid.org/0000-0002-8009-9033
fects in the building structure. This includes identi-
fying cracks, deformations, or other structural issues
by analyzing visual data obtained through images or
scans. This aids in automated analysis and under-
standing of the building composition and conserva-
tion.
AI-powered computer vision algorithms can ana-
lyze images and videos of buildings to identify struc-
tural defects, damage, or irregularities automatically.
Drones equipped with cameras can conduct aerial in-
spections of buildings, capturing high-resolution im-
ages and videos. AI can then be employed to ana-
lyze this data for structural issues. Indeed, the use
of AI techniques often involves training classification
models, and this training process typically relies on
labeled datasets.
This work proposes an AI-driven method focused
on generating annotated 3D models from a partial seg-
mentation of a few Unmanned Aerial Vehicle (UAV)
images. The proposed case studies aim to identify
structural flaws on the 3D surface of old buildings. In
this study, the target anomalies are self-healing ma-
terials, unwanted vegetation, lichens, and encrusted
elements. All of them are detrimental to the conserva-
tion of architectural heritage and their detection aids
in more effective preservation strategies and accurate
inspection of the spatial arrangement of structural el-
ements. The proposed pipeline is divided into 2 main
Jurado-Rodríguez, D., López, A., Jiménez, J., Garrido, A., Feito, F. and Jurado, J.
SAM-Based Detection of Structural Anomalies in 3D Models for Preserving Cultural Heritage.
DOI: 10.5220/0012464000003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 3: VISAPP, pages
741-748
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
741

steps: (1) semi-automatic labeling of structural faults
of the target building in UAV imagery using AI tools,
(2) 3D point cloud image mapping, and classification
using geometric and radiometric features.The main
contribution of the proposed method lies in the de-
velopment of a methodology for recognizing target
materials in 3D point clouds in real-world scenarios
and identifying harmful elements in historic build-
ings. This is of vital importance in architectural con-
servation tasks and strategies.
This document is structured as follows: section 2
presents the current state-of-the-art, reviewing rele-
vant technologies and methodologies related to dig-
italization for preserving cultural heritage. Then,
section 3 describes datasets to which the proposed
method is targeted. section 4 outlines the proposed
method, whereas the obtained results and the exper-
iments conducted to validate our proposal are pre-
sented in section 5. Finally, the main contributions
of this work are summarized in section 6, including
insights toward future work that aid in further enhanc-
ing the proposed methodology.
2 PREVIOUS WORK
Built heritages face changes through time, includ-
ing erosion, degradation, deformations from natu-
ral phenomena, human interventions, inappropriate
restorations, etc (Li et al., 2023). More formally, the
ISO 19208:2016 standard (recently withdrawn, a new
standard is pending) (ISO, 2016) categorizes these de-
fects into five major groups: mechanical, electromag-
netic, thermal, chemical and biological agents. These
downgrading factors contrast with the relevance of
preserving built heritages and thus evidence the im-
portance of this work.
A deep study of the preservation of built heritage
using multiple technologies is provided by (Li et al.,
2023). Amongst these techniques, preservation and
conservation of cultural heritage are not only under-
stood as extracting faults and defects. Instead, the dig-
itization of cultural heritage and its dissemination has
also been vastly revised (Mendoza et al., 2023), de-
spite not being the main goal of this work. In this re-
gard, photogrammetry, Light Detection and Ranging
(LiDAR) and CAD modelling are frequent acquisition
techniques. These technologies are sometimes com-
bined with their digitization in Building Information
Modelling (BIM) that enables maintaining a record
of repairs and changes in cultural heritage (Moyano
et al., 2020; Rocha et al., 2020). Still, the digitization
is an indirect result of our work due to the reconstruc-
tion of 3D point clouds.
Regarding the detection of building anomalies,
current trends involve using Convolutional Neural
Networks (CNN) over imagery from UAVs and close-
sensing technology. Further insight into this field is
given by (Cumbajin et al., 2023). CNNs are catego-
rized according to the target surface, kind of prob-
lem (classification, semantic segmentation, instance
segmentation, etc.), network and training methodol-
ogy. According to this, the detection of defects over
metal surfaces is trained differently than building-
based methods as they require specialized datasets.
This even applies to individual defects: (Perez et al.,
2019) experimented with a shallow CNN composed
of convolutional and dense layers to identify mois-
ture. For this purpose, a small collaborative dataset
from copyright-free Internet images was used.
Transfer Learning has a significantly higher pres-
ence in building supervision than using custom
CNNs. Amongst the most frequent CNN archi-
tectures, pre-trained VGG, YOLO, U-Net, AlexNet,
GoogleLeNet, Inception and Xception networks stand
out. The work of (Kumar et al., 2021) outputs the
bounding box of cracks in close-sensing building im-
ages, helping to monitor them in real-time with UAVs
coupled with a Jetson-TX2. Otherwise, images can be
semantically segmented to highlight cracks (Mouz-
inho and Fukai, 2021). Region-based CNNs are also
frequent in the literature by using R-CNN (Xu et al.,
2021), Fast R-CNN, Faster R-CNN (Maningo et al.,
2020) and YOLO (Kumar et al., 2021). The objective
was to detect regions with cracks.
From the revised literature, it is clear that there are
some gaps in current building monitoring. Firstly, it is
mainly carried out using close-sensed imagery, rather
than enabling the monitoring of large areas. Thus,
surveys are far slower as they need to capture small
regions of buildings. Second, CNNs are specialized
in specific materials and defects. This drawback is
not only caused by learning limitations but also by
the lack of available datasets. This is even more visi-
ble for defects such as moisture, where RGB imagery
is used instead of more suitable data sources (e.g.,
thermography). Unlike our work, some of the revised
studies are intended for real-time tracking by com-
municating information with Internet of Things (IoT)
communication (Kumar et al., 2021). The main draw-
back of the latter is that it requires planning the lo-
cation of a few devices, for instance, addressing the
optimal sensor placement (OSP). On the other hand,
our case study provides a long-term monitoring tool
for large buildings, that, however, is not a continuous
tracking. Therefore, it is intended for cultural her-
itage whose immediate changes are of no relevance
in the short term. Although this study is conducted
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
742
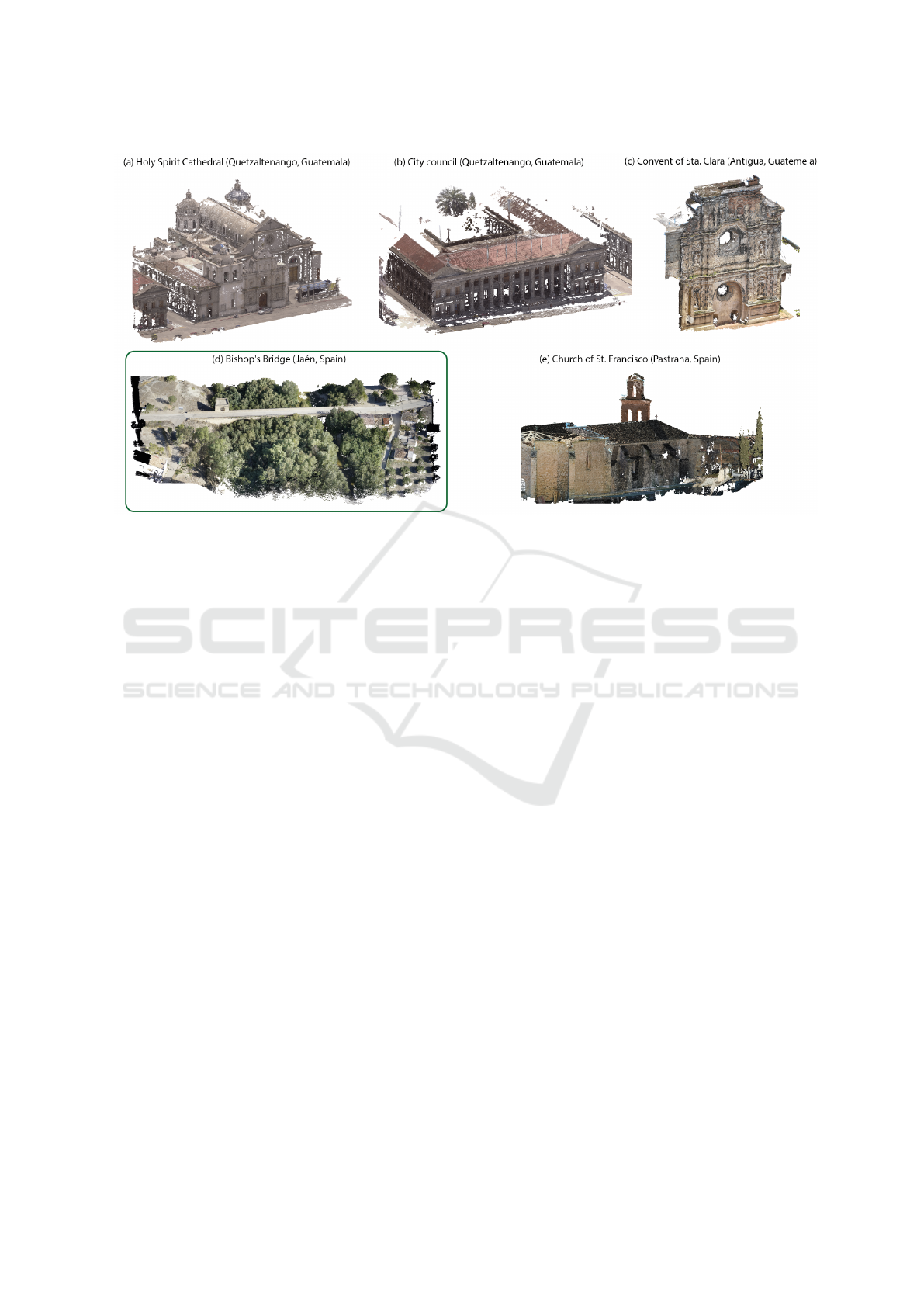
Figure 1: Selected models for the digitization of historical heritage and conservation assessment. These datasets comprise
point clouds for 3D representation and high-resolution images (50 MP).
with RGB imagery, point clouds can be fed with fur-
ther data sources (L
´
opez et al., 2023) that can improve
anomaly detection.
3 THE GENERATION OF
DATASETS
The increasing use of photogrammetric techniques
and LiDAR systems has facilitated the generation of
a wide variety of high-detailed 3D models from many
real-world scenarios. Moreover, the digitization of
cultural heritage has been promoted by the prolifer-
ation of UAV sensors capable of capturing multi-view
images of the whole building structure. Consequently,
dense point clouds can be easily generated and they
bring new opportunities to combine geometric and
spatial features for multiple purposes such as object
detection, semantic classification, and scene under-
standing.
In the field of preservation and restoration of his-
toric buildings, the generation of 3D models allows us
to achieve a more accurate assessment of current con-
servation status. In recent years, we have collected
a huge set of 3D models of significant cultural sites
and civil infrastructures. These datasets were gener-
ated by using airborne LiDAR or photogrammetry. In
both cases, overlapped RGB images were captured to
obtain textured point clouds. Depending on the ac-
quisition system, the image resolution ranges from 20
to 50 megapixels (MP), whereas the point cloud den-
sification varies from 100 to 500 points per squared
meter. Figure 1 shows some results of the resulting
3D reconstructions corresponding to different places
in Spain and Guatemala.
The case study of this work is the Bishop’s Bridge
scenario to automatically identify materials or anoma-
lies that may pose a risk to the preservation of this
structure. The Bishop’s Bridge is a noteworthy exam-
ple of the Andalusian Renaissance, and its construc-
tion dates back to the early 16th century. More pre-
cisely, it was built between 1505 and 1518 to facilitate
passage over the Guadalquivir River. The bridge, de-
signed on a slope to accommodate the varying lev-
els of the supporting shores, comprises four ashlar
arches. These arches are reinforced by correspond-
ing cutwaters—curved pillars strategically placed to
mitigate the force of the water and evenly distribute it
across each arch. Additionally, a chapel is affixed to
one of the abutments of the bridge.
4 METHODOLOGY
This section presents the workflow to detect struc-
tural anomalies in 3D architectural building models.
Our method consists of two stages: the first employs
a few UAV images for the semi-automated identifi-
cation of anomalies in the infrastructure surface and
generates segmented imagery. The second stage is
SAM-Based Detection of Structural Anomalies in 3D Models for Preserving Cultural Heritage
743
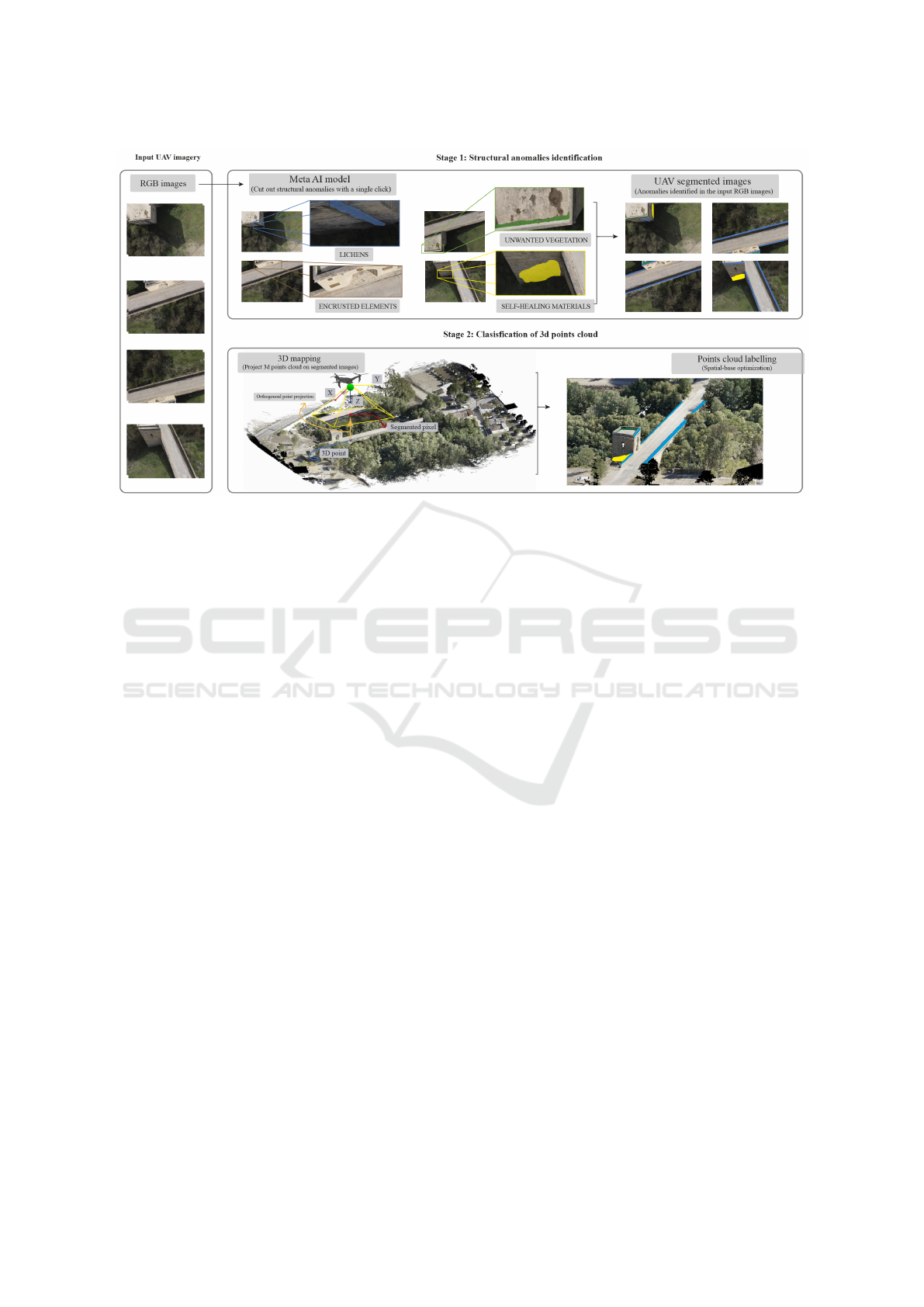
Figure 2: An overview of the proposed workflow that summarizes the main steps of the proposed solution combines an AI-
based technique for fast-forward image labeling and a fully automatic detection of target classes in 3D point clouds.
the mapping of the 3D point cloud onto previously
segmented images. This provides partial labeling of
the point cloud. Finally, an algorithm for 3D model
classification based on geometric and color features is
implemented by taking the already segmented classes
as a starting point, generating a fully segmented 3D
point cloud.
Figure 2 provides a graphical overview of the pro-
posed methodology. The obtained results demon-
strate the reliability of our proposal in identifying
anomalies such as self-healing materials, unwanted
vegetation, lichens, and encrusted elements in archi-
tectural structures within real-world environments.
4.1 Structural Anomalies Identification
in UAV Images
The precise classification of diverse objects within
three-dimensional environments continues to pose a
considerable challenge for contemporary AI models.
To the best of our knowledge, a comprehensive AI
model that effectively tackles the intricate task of
semantic segmentation in 3D models has not been
yet found. Nevertheless, amid this existing limita-
tion, current AI models exhibit significant promise
for the semantic segmentation of high-resolution im-
ages. In this context, SAM (Segment Anything
Model)(Kirillov et al., 2023) must be highlighted as
a valuable resource that employs advanced machine
learning techniques to identify and delineate various
objects in an image. Our methodology utilizes ”Seg-
ment Anything” as a semi-automatic tool to delineate
specific anomalies, such as self-healing materials, un-
wanted vegetation, lichens, and encrusted elements,
on the architectural structures of interest in images
captured by UAVs.
The principle of SAM lies in its ability to con-
duct a meticulous analysis of the visual characteris-
tics of images using pattern recognition and classi-
fication techniques based on geometric and textural
features. This approach enables SAM to distinguish
various elements within an image. However, the ini-
tial segmentation performed by SAM may not always
achieve the required precision, particularly in the con-
text of cultural heritage preservation. This is where
the intervention of experts in architectural conserva-
tion and image analysis becomes essential. Following
SAM’s initial segmentation, these specialists review
and enhance the results, applying their expertise in
architecture and the historical significance of the ele-
ments under scrutiny. This review process fine-tunes
and refines the segmentations to achieve precise and
contextually relevant outcomes.
This intervention facilitates the correction and re-
finement of segmented parts, ensuring a nuanced and
accurate depiction of anomalies. The hybrid nature of
this approach, fusing the precision of machine learn-
ing with human expertise, substantially enhances the
overall quality of the segmentation and subsequently
improves the efficacy of anomaly detection. The seg-
mentation stage generates a set of labeled images,
serving as a crucial starting point for the next method
phase.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
744
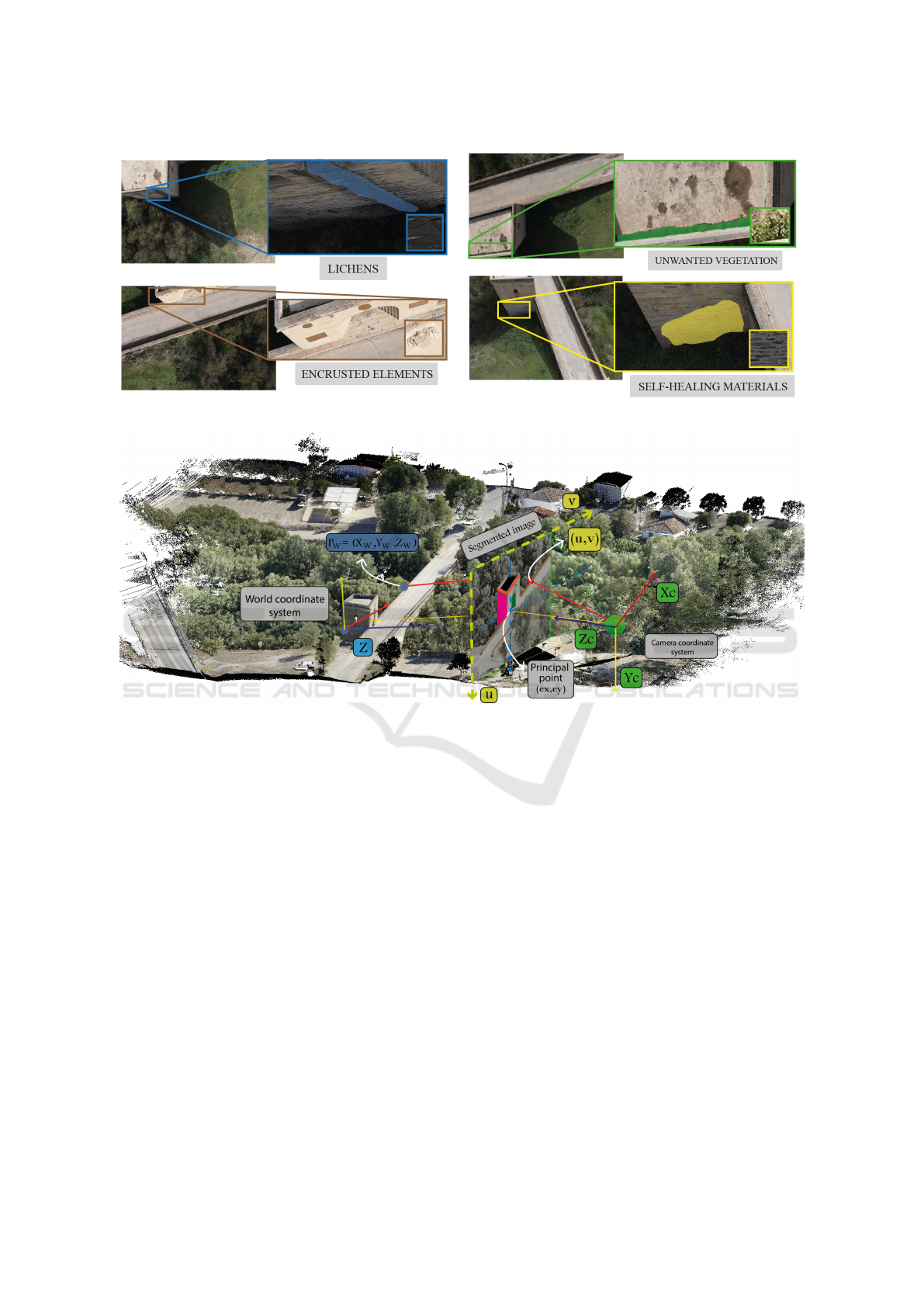
Figure 3: UAV images highlighting the anomalies taken into account in this investigation.
Figure 4: Graphical overview of the pinhole camera model. This describes the relationship between the coordinates (X,Y,Z)
of one point in the world space and its projection (u,v) onto the image plane of an ideal pinhole camera.
4.2 Classification of 3D Points Clouds
The classification of 3D point clouds constitutes a
fundamental stage in our methodology for identifying
structural anomalies in 3D models. In this section, we
present an algorithm to automatically 3D point cloud
labelling, using the segmented UAV images generated
in the previous section. This algorithm is divided into
two phases: 3D mapping and point cloud labeling.
The initial phase projects the 3D point cloud onto the
segmented images and labels those points whose pro-
jection finds a segmented class. The second phase in-
volves expanding these initially labeled regions in the
point cloud using the following information: (1) the
angle formed by the point’s normal with respect to the
class normal, (2) the point color, and (3) the angle of
the expansion vector with respect to the perpendicular
vector of the normal.
4.2.1 The 3D Mapping
The 3D mapping process estimates the projection of
a single 3D point onto the image plane. This projec-
tion is computed (as depicted in Figure 4) using the
pinhole camera model. Given a point (P
w
) with co-
ordinate (X
w
,Y
w
,Z
w
) in the world coordinate system,
the rotation and translation camera matrix (R, and t)
which represent the camera’s orientation and position
in the world. The rotation matrix R describes how the
camera is oriented, while the translation matrix T in-
dicates its location relative to a reference point. Note
that both matrix are derived from the extrinsic calibra-
tion process and enable to estimate the transformation
from (P
w
) to camera coordinate system (X
c
,Y
c
,Z
c
) as
follows.
X
c
Y
c
Z
c
= [R | t]
X
w
Y
w
Z
w
1
(1)
SAM-Based Detection of Structural Anomalies in 3D Models for Preserving Cultural Heritage
745

The lens distortion is modelled using ra-
dial distortion (k
1
,k
2
,k
3
,k
4
,k
5
,k
6
), tangential dis-
tortion (p
1
,p
2
) and prism distortion coefficients
(s
1
,s
2
,s
3
,s
4
). Thus, given the camera matrix (K),
composed of focal lengths (f
x
,f
y
) and an optical cen-
ter (c
x
,c
y
), the coordinates value (u,v) which deter-
mine the projection of the (P
w
) to the segmented im-
age plane is computed as:
u
v
=
f
x
x
′′
+ c
x
f
y
y
′′
+ c
y
(2)
where
x
′′
y
′′
=
x
′
1+k
1
r
2
+k
2
r
4
+k
3
r
6
1+k
4
r
2
+k
5
r
′
k
6
r
6
+ 2p
1
x
′
y
′
+ p
2
r
2
+ 2x
′2
+ s
1
r
2
+ s
2
r
4
y
′
1+k
1
r
2
+k
2
r
4
+k
3
r
6
1+k
4
r
2
+k
5
r
4
+k
6
r
6
+ p
1
r
2
+ 2y
′2
+ 2p
2
x
′
y
′
+ s
3
r
2
+ s
4
r
4
(3)
with
r
2
= x
′2
+ y
′2
(4)
and
x
′
y
′
=
X
c
/Z
c
Y
c
/Z
c
if Z
c
̸= 0 (5)
Finally, it is crucial to highlight that after the 3D
mapping stage, a filtering process is performed to dis-
card occluded points. Occlusion is a common issue
in three-dimensional environments and affects the ac-
curacy of the segmentation process significantly. To
tackle this, a ’z-buffer’ is generated for each image
during the projection stage. This buffer stores the
depth of the 3D points projected from the camera po-
sition. In this way, the occluded points are identified
and omitted.
Figure 5: Visual results showing the removal of spotted oc-
clusion (marked in red) after applying the proposed method.
In Figure 5, discarded points marked as occluded
are highlighted in red. This visual representation il-
lustrates the impact of occluded point removal, help-
ing to improve the quality and accuracy of the final
result by providing a faithful and complete represen-
tation of the segmented class.
4.2.2 Point Cloud Labelling
After performing the mapping and omitting occluded
points, a partially segmented point cloud is obtained.
Only the points visible in the images are labelled in
this stage; for this reason, the following step is to ex-
tract a more complete segmentation of the cloud from
the previously labelled 3D dataset.
Figure 6: The proposed method to expand the initially la-
beled classes and generate the 3D point cloud completely
labeled.
In order to address this challenge, an automatic
method based on 3D geometric features has been im-
plemented. For each labeled class, we computed: (1)
a radius (r) to determine the search area in which
neighboring unlabeled points will be considered (2)
the expansion vector, and (3) the color gradient. In
our study, after some tests, the radius is set to five
times the ground sampling distance (GSD). Note that
three unlabeled point features are taken into account
to add the point into the segmented class: (1) the nor-
mal vector, (2) the vector perpendicular to the normal
in the class plane, and (3) the color (R, G, B). If the
point and class vectors are closely aligned (i.e., the
enclosed angle is smaller than their respective thresh-
olds) and the color does not diverge by more than one
given threshold, the point is added to that class.
Figure 6 presents an example of how this method
works to obtain the segmentation of unlabeled points
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
746
belonging to the ’lichen’ class. Geometric and spatial
features were significantly more useful to obtain bet-
ter results. In this way, those 3D points not labeled in
the images can be part of the surrounding classes with
which they share similar features.
5 RESULTS AND EVALUATION
In this section, we describe the results from the exper-
iments which were carried out to validate the method
in natural scenarios. The accuracy, performance, and
robustness of our method were tested on several sce-
narios considering different architectural buildings.
In summary, the resulting 3D models are character-
ized by a GSD of 0.7 cm, an average point cloud den-
sity of 5 thousand points per cubic meter, and a total
of 8 million points. These results were obtained using
a CPU (Intel® CoreTM i7-10510U 2.30 GHz) with 8
GB RAM and Ubuntu 20.04.1 as the operating sys-
tem.
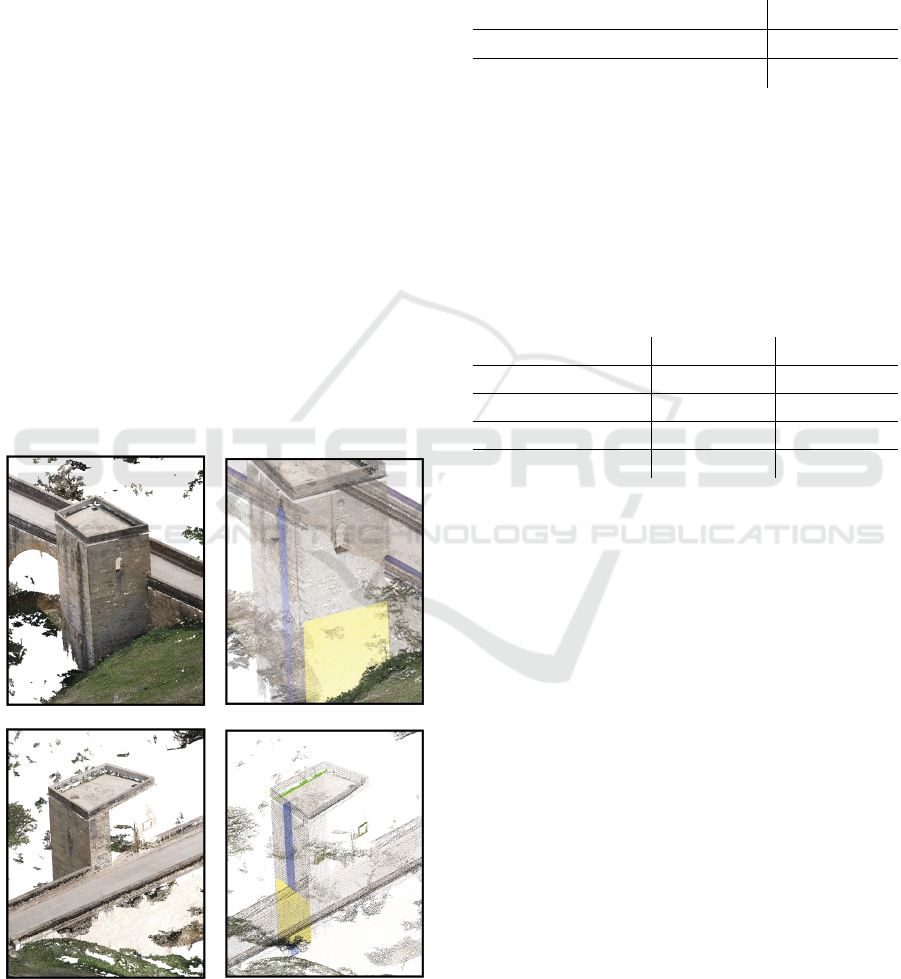
Section 5 shows the result of our method after per-
forming the classification and identification of the dif-
ferent anomalies in the 3D point cloud. As a result,
our method generates a total of 4 point clouds, one
for each detected anomaly.
Figure 7: Results achieved after 3D point cloud labeling.
Regarding the performance of the method, Table 1
shows the computational cost required by the method
to perform the point cloud classification in its entirety.
As can be seen in the table, the cloud mapping on
the images only takes 9 seconds; however, the auto-
matic cloud labeling process requires a total of 25.4
seconds.
Table 1: Response time of the automated 3D point cloud
classification.
Classification of 3D points clouds Average (sec)
A. The 3D mapping 8.02
B. Point cloud labelling 25.4
In order to validate the results obtained, Table 2
counts the total number of labeled points after map-
ping the cloud on the segmented images. Then, it
shows how we managed to increase the number of la-
beled points after applying our method, thus obtaining
a completely labeled 3D point cloud.
Table 2: Comparison between 3D points labeled with a sin-
gle image as reference and those labeled after applying the
expansion method.
Anomalies Single Image Our method
Lichens 64.256 430.750
Encrusted elements 2.658 5.478
Unwanted vegetation 11.256 26.567
Healing material 26.985 75.458
6 CONCLUSIONS AND FUTURE
WORKS
In summary, this study addresses the detection of
structural defects and anomalies in cultural heritage.
The main contribution of our method is an algo-
rithm to exploit the spatial and geometric features,
enabling the recognition of target materials in the en-
tire 3D point cloud. The results demonstrate the fea-
sibility and usefulness of this approach in real sce-
narios, identifying self-healing materials, unwanted
vegetation, lichens, and embedded elements on the
3D surfaces of historic buildings. The detection of
these detrimental elements contributes to more effec-
tive conservation strategies.
The proposed method is divided into two main
steps: semi-automatic labeling of structural faults in
UAV images using AI tools and mapping and classifi-
cation of 3D point cloud images using geometric and
radiometric features.
In conclusion, this study presents a novel AI-
based approach with promising results for the auto-
mated detection of structural anomalies in cultural
heritage in 3D natural scenarios. The integration of
SAM-Based Detection of Structural Anomalies in 3D Models for Preserving Cultural Heritage
747

AI-based techniques and 3D point cloud analysis con-
stitutes a valuable contribution to the conservation
and preservation of architectural heritage, highlight-
ing the feasibility and potential impact on structural
health monitoring in the field of cultural heritage.
ACKNOWLEDGEMENTS
This project has been funded under the contract
signed between the UNIVERSITY OF JA
´
EN and the
companies ALBAIDA INFRAESTRUCTURAS S.A.
and TALLERES Y GRUAS GONZALEZ, S.L. which
regulates the work on ”Multisensory Image Pro-
cessing and Analysis for Material Segmentation and
Characterization” (EXP. 2021 120) and the research
projects with references PID2022-137938OA-I00,
PID2021-126339OB-I00 and TED2021-132120B-
I00.These projects are co-financed by the Junta
de Andaluc
´
ıa, Ministerio de Ciencia e Innovaci
´
on
(Spain), and the European Union’s ERDF funds.
REFERENCES
Cumbajin, E., Rodrigues, N., Costa, P., Miragaia, R.,
Fraz
˜
ao, L., Costa, N., Fern
´
andez-Caballero, A.,
Carneiro, J., Buruberri, L. H., and Pereira, A. (2023).
A systematic review on deep learning with cnns ap-
plied to surface defect detection. Journal of Imaging,
9(10).
ISO (2016). Iso 19208:2016- framework for specifying per-
formance in buildings.
Kirillov, A., Mintun, E., Ravi, N., Mao, H., Rolland, C.,
Gustafson, L., Xiao, T., Whitehead, S., Berg, A. C.,
Lo, W.-Y., Doll
´
ar, P., and Girshick, R. (2023). Seg-
ment anything. arXiv:2304.02643.
Kumar, P., Batchu, S., Swamy S., N., and Kota, S. R.
(2021). Real-time concrete damage detection using
deep learning for high rise structures. IEEE Access,
9:112312–112331.
Li, Y., Zhao, L., Chen, Y., Zhang, N., Fan, H., and Zhang,
Z. (2023). 3d lidar and multi-technology collabora-
tion for preservation of built heritage in china: A re-
view. International Journal of Applied Earth Obser-
vation and Geoinformation, 116:103156.
L
´
opez, A., Ogayar, C. J., Jurado, J. M., and Feito, F. R.
(2023). Efficient generation of occlusion-aware mul-
tispectral and thermographic point clouds. Computers
and Electronics in Agriculture, 207:107712.
Maningo, J. M. Z., Bandala, A. A., Bedruz, R. A. R., Da-
dios, E. P., Lacuna, R. J. N., Manalo, A. B. O., Perez,
P. L. E., and Sia, N. P. C. (2020). Crack detection with
2d wall mapping for building safety inspection. In
2020 IEEE REGION 10 CONFERENCE (TENCON),
pages 702–707.
Mendoza, M. A. D., De La Hoz Franco, E., and G
´
omez, J.
E. G. (2023). Technologies for the preservation of cul-
tural heritage: A systematic review of the literature.
Sustainability, 15(2).
Mouzinho, F. A. L. N. and Fukai, H. (2021). Hierarchi-
cal semantic segmentation based approach for road
surface damages and markings detection on paved
road. In 2021 8th International Conference on Ad-
vanced Informatics: Concepts, Theory and Applica-
tions (ICAICTA), pages 1–5.
Moyano, J., Odriozola, C. P., Nieto-Juli
´
an, J. E., Vargas,
J. M., Barrera, J. A., and Le
´
on, J. (2020). Bring-
ing BIM to archaeological heritage: Interdisciplinary
method/strategy and accuracy applied to a megalithic
monument of the Copper Age. Journal of Cultural
Heritage, 45:303–314.
Perez, H., Tah, J. H. M., and Mosavi, A. (2019). Deep learn-
ing for detecting building defects using convolutional
neural networks. Sensors, 19(16).
Rocha, Mateus, Fern
´
andez, and Ferreira (2020). A Scan-
to-BIM Methodology Applied to Heritage Buildings.
Heritage, 3(1):47–67.
Xu, Y., Li, D., Xie, Q., Wu, Q., and Wang, J. (2021). Au-
tomatic defect detection and segmentation of tunnel
surface using modified mask r-cnn. Measurement,
178:109316.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
748
