
DriveToGæther: A Turnkey Collaborative Robotic Event Platform
Florence Dupin de Saint-Cyr
1 a
, Nicolas Yannick Pepin
2 b
, Julien Vianey
1 c
, Nassim Mokhtari
3
,
Philippe Morignot
4
, Anne-Gwenn Bosser
3 d
and Liana Ermakova
3 e
1
IRIT, Toulouse University, France
2
Zoetis, Denmark
3
Lab-STIIC, Brest, France
4
Independent Researcher, France
Keywords:
Learning by Doing, Cooperation AI/human, Robots, Ludic Event.
Abstract:
This paper reports the organization of an event that enabled experts as well as non-specialists to practice
Artificial Intelligence on robots, with the goal to enforce human-AI cooperation. The end aim of this paper is
to make the material and virtual platform built for the event reusable by as many people as possible, so that
the event can be reproduced and can give rise to new discoveries or to the production of new data sets and
benchmarks. The underlying purpose is to de-demonize AI and to foster group work around a fun, rewarding
and caring project.
1 INTRODUCTION
The aim of the Turing test was to test the credibility
of a machine by checking whether it could be mis-
taken for a human, and thus to demonstrate the in-
telligence of the machine compared with that of the
human. The goal of inventing a machine that can
deceive a human being by imitating him or her no
longer seems as interesting today, since on the one
hand it has been successful in certain fields, and on
the other because the future lies more in complemen-
tarity than in human/machine competitiveness. This
complementarity is all the more necessary in fields
where human performance is poor: there are around
3,600 deaths a year in traffic accidents on French
roads, 40,000 in the USA and many more in devel-
oping countries. Although robotized vehicles were
proposed in the early 90s as a way of improving this
situation, society seems to be moving towards road
traffic that is certainly made up of autonomous vehi-
cles, but which will also coexist with cars driven by
humans, at least initially.
This paper describes the organization of an event
that enabled experts as well as non-specialists to prac-
tice Artificial Intelligence on robots with the ambition
a
https://orcid.org/0000-0001-7891-9920
b
https://orcid.org/0009-0001-3361-5381
c
https://orcid.org/0000-0001-7897-5666
d
https://orcid.org/0000-0002-0442-2660
e
https://orcid.org/0000-0002-7598-7474
of making humans and AI work together. The work-
shop was open to anyone interested in developing
efficient, cooperative, and adaptive algorithms: re-
searchers, students, academics, high school students,
engineers, hobbyists, industrialists, and the general
public. Indeed the DriveToGæther event is a place
where AI algorithms are neither in competition with
humans nor tasked with deceiving them by pretending
to be human. The material and virtual platform built
for the event is intended to be reusable by everyone,
so that the event can be reproduced and give rise to
new discoveries or to the production of new data sets
and benchmarks
1
. The end goal of this article is to
make these resources visible and accessible.
Traditional robotics competition (like e.g.
RoboCup or the French mapping challenge
“CAROTTE”) favors the integration of sensor
and actuator algorithms into a robotic platform (with
perception, SLAM
2
, data fusion, control, etc.), it
is the same for educative robotic platforms such as
e.g. Duckietown (Paull et al., 2017). In contrast,
the aim of the DriveToGæther event is to focus on
robot intelligence, and in particular on the comple-
mentarity between artificial and human intelligence.
More precisely, the goal is to integrate high-level
algorithms within a robotic platform, highlighting the
1
The link to the github project containing all the source
code and documentation is https://github.com/cecilia-afia/
DriveToGaether.
2
SLAM: Simultaneous Localization and Mapping
404
Dupin de Saint-Cyr, F., Pepin, N., Vianey, J., Mokhtari, N., Morignot, P., Bosser, A. and Ermakova, L.
DriveToGæther: A Turnkey Collaborative Robotic Event Platform.
DOI: 10.5220/0012463800003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 1, pages 404-411
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

intelligence of robots for cooperating with human.
The event organizers supplied robots already pro-
grammed to obey simple commands to execute over
a playground made up of carpet tiles (on which lines
are painted): go ahead, turn left or right, pick up or
drop off victims. Each robot, controlled either by a
human or by a program has to integrate the configu-
ration of the flat playground. Victims, hospitals, and
starting positions for the robots are placed on the play-
ground, marked by cards on the floor, and the config-
uration of the cards can change with each game (see
Figure 1). Instructions must be sent to a central server,
which acts as a filter to check their feasibility before
they can be executed by the robots and announced
to all the robots. The global goal is to save all the
victims in the playground, i.e., pass over the victim
cell, beep once (to signal pick-up), pass over a hos-
pital cell, beep twice (to signal drop-off). Each robot
is allowed to transport a maximum of 2 victims at a
time.
Figure 1: DriveToGæther event in 2023.
This paper is organized as follows: Section 2 de-
scribes existing approaches related to human-machine
collaboration; then the genesis of DriveToGæther is
presented toward the recall of the organization of sev-
eral events from 2016 to 2022. The physical and vir-
tual platforms used during DriveToGæther event, with
all their components and the competition’s rules, are
depicted in Section 4; the organisational and scientific
outcomes of the event are finally discussed.
2 RELATED WORK
In this section we are interested in reviewing some
domains where AI should at least take into account
and even cooperate with humans. Let us first start
by evoking the idea of Centaur-AI by quoting (Case,
2018): “In 1998, Garry Kasparov held the world’s
first game of ‘Centaur Chess’ (...) half-human, half-
AI. But if humans are worse than AIs at chess,
wouldn’t a Human + AI pair be worse than a solo
AI? Wouldn’t the computer just be slowed down by
the human (...)? In 2005, an online chess tournament,
inspired by Kasparov’s Centaurs, tried to answer this
question. They invited all kinds of contestants - su-
percomputers, human grand-masters, mixed teams of
humans, and AIs - to compete for a grand prize. Not
surprisingly, a Human + AI Centaur beats the solo
human. But -amazingly- a Human + AI Centaur also
beats the solo computer.” This promising idea about
Centaur AI is inspired from the nature where sym-
biosis has many positive effects: quoting again (Case,
2018): “Symbiosis shows us you can have fruitful col-
laborations even if you have different skills, or differ-
ent goals, or are even different species. (...) Sym-
biosis is two individuals succeeding together not de-
spite, but because of, their differences. Symbiosis is
the “+”.” Indeed as we shall see in the following re-
lated works, machine-AI teaming is very promising in
many domains.
2.1 Intelligent Transportation Systems
In the domain of Intelligent Transportation Systems,
a.k.a., the autonomous and connected vehicle, six lev-
els of autonomy are defined, from vehicles with “no
autonomy” (level 0) to “fully autonomous” vehicles
(level 5) (Nashashibi, 2019), via level 1 where the
driver is constantly in charge of the maneuvers but
may delegate easy tasks, level 2 where the responsi-
bility is entirely delegated to the system but constantly
supervised by the driver, level 3 where the driver can
do other tasks during the travel but must be able to
take control back when conditions require it, level 4
where the driver can completely focus on other tasks.
These levels may vary during a trip with au-
tonomous driving: the autonomous vehicle can adapt
its autonomy to the state of the driver so that control
has to be arbitrated between the driver and the system
(Morignot et al., 2014). For this, the system perceives
the driver’s state by pointing a camera at him and de-
tects the level of tiredness of the driver by analyz-
ing his/her blinking frequency and head angle. If the
driver is fully awake, the system can switch to level 0,
for the driver to actually fully drive the vehicle. But
if the driver is tired, levels 2 or 3 are chosen due to
less focus capability of the driver. When a driver is
exhausted and fully asleep, the system switches to au-
tomation level 5. Therefore, human driver and system
collaborate towards avoiding collision while driving
the vehicle.
DriveToGæther: A Turnkey Collaborative Robotic Event Platform
405

2.2 Human-Aware Social Robots
A major contribution to human-robot interaction is
presented in (Lemaignan et al., 2017), which de-
scribes a cognitive architecture for social robots:
robots that communicate with humans in a multi-
modal way (natural language, designate objects by
gesture, etc) and collaborate towards achieving com-
mon tasks in domestic interaction scenarios, e.g.,
cleaning a table covered with objects, moving objects
to a different home with a robot helping to pack.
This human-aware deliberative architecture is
based on the principle that human-level interaction is
easier to achieve if the robot itself relies internally
on human-level semantics. Therefore this architec-
ture is based on an active knowledge base: the ge-
ometric reasoning module produces symbolic asser-
tions describing the state of the robot environment and
its evolution over time. These logical statements are
stored in the knowledge base, and queried back, when
necessary, by the language processing module, the
symbolic task planner, and the execution controller.
The output of the language processing module and the
activities managed by the robot controller are stored
back as symbolic statements as well. This delibera-
tive architecture has been implemented and tested in
several scenarios (see (Lemaignan et al., 2017)).
2.3 Human-Robot Teaming
A major contribution towards human-robot inter-
action is represented by the man-machine teaming
project, organized by Dassault and Thales compa-
nies, aiming at creating an aerial cognitive system
(Dassault-Aviation, 2018). It consists in equipping
the systems with greater autonomy towards collabo-
rative work, that would make operator actions and de-
cisions more efficient and optimized while mobilizing
less of the operator’s mental and physical resources.
The topics cover diverse themes such as virtual assis-
tant and intelligent cockpit, man-machine interaction,
mission management system, intelligent sensors, sen-
sors’ services, robotized support, and maintenance.
Human-robot teaming requires the machine to rec-
ognize the goal of the human, this domain of research
is very large, see e.g. (Van-Horenbeke and Peer,
2021) for a review of the field. Indeed as these au-
thors say: “recognizing the actions, plans, and goals
of a person is a key feature that future robotic systems
will need in order to achieve a natural human-machine
interaction”. Furthermore the idea to not only help by
guessing what the human will do but also to suggest
the person to adopt a given behavior is also a subject
of research called cognitive planning (see e.g. (Fer-
nandez Davila et al., 2021) in a logic-based setting).
2.4 Interactive Diagnosis
In the medical domain, (Henry et al., 2022) describes
the results of qualitative analysis of coded interviews
with clinicians who use a machine learning-based sys-
tem for diagnosis. Rather than viewing the system
as a surrogate for their clinical judgment, clinicians
perceived themselves as partnering with the technol-
ogy. Even without a deep understanding of machine
learning, clinicians can build trust with an ML system
through experience, expert endorsement and valida-
tion, and can use systems designed to support them.
Note that there were remaining perceived barri-
ers to the use of ML in medicine: potential for over-
reliance on automated systems, risk to standardize au-
tomatic care even in scenarios where a clinician dis-
agrees with the system.
3 THE DriveToGæther GENESIS:
FROM HUMAN–TOY-ROBOTS
TEAMS CONTESTS TO A JAM
FOR TEXT GENERATION
This section recall the competitions organized from
2016 to 2022 in order to make cooperate toy-robots
either with other toy-robots or with human-driven toy-
robots and also the organization of a jam. The succes-
sive organization of these events leads us to propose
the DriveToGæther event, that we will present in Sec-
tion 4, which was nomore a competition but a jam for
toy-robots and human cooperation.
3.1 2016 Ricochet Robot Contest
The first event organized by our group was a compe-
tition called “AI on robots” in 2016 where robots had
to explore a flat playground of 10m × 5m, with a grid
drawn on the floor and walls made of wood boards
disposed on the borders of some cells of the grid (see
Figure 2). The positions of the interior walls could
vary and were unknown to the competitors before
each game. Each team could bring and use several
robots. The aim of each team was to send a robot to
a destination. This was done in two steps: a phase for
mapping the arena followed by a phase to get to the
destination given the mapping. The imposed robots
were Lego Mindstorm (NXT or EV3, see Figure 3).
For the second phase, the rules of the competition
were adapted from the ”Ricochet Robot” game: from
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
406
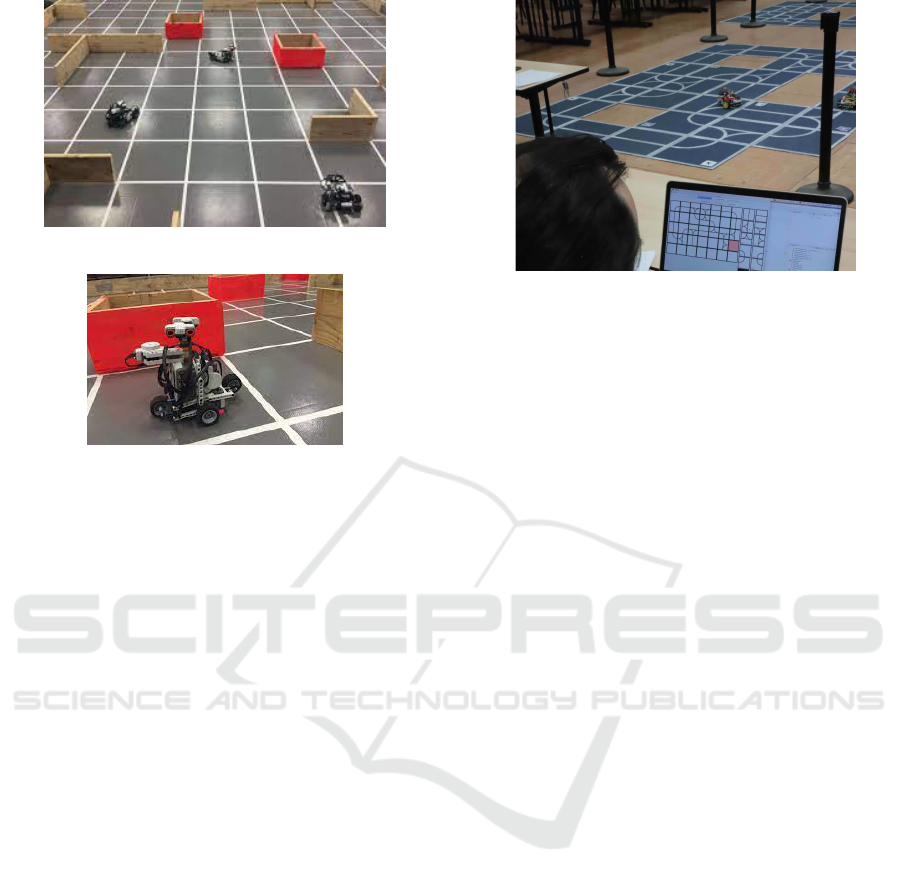
Figure 2: Ricochet robot contest playground.
Figure 3: A Lego Mindstorm NXT at Ricochet robot con-
test.
an entry point in the arena, reach a destination by rico-
chet moves: the robot always goes straight ahead and
can only change direction when it “bounces off” an
obstacle (a wall or another robot). Several levels of
difficulty were proposed: depending on the number
of teams in the arena (1 or 2) and depending on the
information about the destination (given at the start or
discovered when encountering another robot). In the
latter case, the robot(s) in each team must first pass
an opposing robot to find out their target destination,
before trying to reach that destination by bouncing off
obstacles.
In total the competition welcomed about fifty vis-
itors, with the visit of a primary school class. The
12 participants of the 7 registered teams were re-
searchers, PhD, Master and Bachelor computer sci-
ence students. They were kind enough to answer the
children’s many questions. A television crew came to
film for the local news (France 3 Auvergne, 2016).
3.2 2019 DriveToGæther Contest
In this contest, the participants should bring their
robots, no specific type was imposed, the only con-
straint was that the robots do not exceed the size of
the carpet tiles (see Figure 4).
A team had to control two robots, a robot directly
piloted by a human and an automatic robot. The auto-
matic robot had to integrate beforehand the configu-
ration of the playground the places of the victims and
hospitals and the starting positions of both robots.
Several challenges were proposed:
Figure 4: The 2019 DriveToGæther contest.
• build the most manoeuvrable robot (a question-
naire on the manoeuvrability was completed by
the participants and the jury).
• be the fastest to save all victims on the playground
• be the most effective in number of operations
on this same playground (the operations of each
robot were counted, the maximum was returned).
AI Used: One of the teams proposed to launch sev-
eral A* to determine the shorter paths from the robot
to the different victims (or hospitals). For this pur-
pose, they used a “heat map” in which the cells
close to other robots were considered hot (therefore
weighted with a positive weight) and were repellent
(heat depended on the proximity of robots), cold ar-
eas (weighted with a negative weight) were desirable
(freshness depended on the proximity of hospitals or
victims). The interface was coded in Java, the arduino
was a kind of C++, and the embedded AI on Rasp-
berry was encoded in Python.
A team made an interface on which a user can
specify the playground (graph with vertices with posi-
tions of the victims, hospitals, starting points). From
the interface, it generates a PDDL representation of
the problem (composed of an initial state and a goal)
that is solved with CBT which is an optimal anytime
planner (whose quality increases over time). For ex-
ample by leaving 2 minutes to the algorithm, it ob-
tained a solution for a single robot in 32 operations
(for the small playground with 6 victims and 2 hos-
pitals). From the obtained plan, the first action was
executed then the planner was relaunched from the
new state as long as there were still victims to save.
The development was done in Java.
Another team assumed that the human would
choose the best rescue strategy. They also chose to
rely on humans to avoid immediate collisions. Thus,
an algorithm estimates the most likely human deci-
sion and translates it in terms of proximity to accessi-
ble victims/hospitals. The algorithm calculates a pos-
DriveToGæther: A Turnkey Collaborative Robotic Event Platform
407

sible complete strategy of the human. It then chooses
among the human strategies of equivalent probability
the farthest goal to reach for the human-driven robot
which is closest to the automatic robot. Therefore the
latter realizes the strategy complementary to that of
the human beginning with the last actions of it. Af-
ter each action there is an estimate of the deviation
from the estimated human strategy and re-calculation
of the possible strategies of the human if it has devi-
ated. Development was done in Python.
Outcomes of the Competition. In total the com-
petition welcomed about forty visitors. Given the
amount of work to achieve the material and regula-
tory framework of the competition, given the inter-
est of the challenge itself expressed by the public and
participants, the competition was worth replicating.
However we thought that we should find a way to
encourage more participation: we faced a lot of last-
minute withdrawals from local students not available
on the dates of the contest although having realized
the necessary programs (during internships).
The very good results obtained by the team that
was not prepared before, and that registered on site
only, made us consider that a Game jam format or
Hackaton could bring more participation.
3.3 2022 Text Generation Jam
The Jam Generation of texts which are poetic or fun
or both, event was organized in 2022 (Bosser et al.,
2022). Inspired by Game Jams
3
and Proc Jams
4
, this
event gave participants the chance to play together to
implement AI tools with the same goal in mind. A
jam is a ludic event where creativity is put forward.
It is a time to meet and a place to experiment, where
sharing skills and learning new technologies are en-
couraged.
The participants were provided with research pa-
pers on humor and poetic generation (He et al., 2019;
Weller et al., 2020; Van de Cruys, 2020; Valitutti
et al., 2013), a list of AI models as well as data, such
as Lexicon 3
5
, ConceptNet
6
, the JOKER corpus
of wordplay in English and French (Ermakova et al.,
2023). Specific themes or constraints on the gener-
ated text were proposed by the organizers which were
addressed by a range of AI techniques applied by the
participants (Bosser et al., 2022).
Forty participants were attracted by the jam. The
enjoyment of an artificially created joke is subjective
3
https://globalgamejam.org/
4
https://www.procjam.com/
5
http://www.lexique.org/
6
https://conceptnet.io/
and may vary from person to person. Evaluating the
creativity of Large Language Models LLMs is a dif-
ficult task, and when addressing the challenges asso-
ciated with jokes produced with minimal human in-
volvement, we should take into account the human
lack of trust towards the actual creativity of the AI.
4 PLATFORM DESCRIPTION
The event organized in 2023 by our group dealt with
AI on robots following the competition named Drive-
ToGæther organized in 2019. Hence, the challenge is
for robots to ”rescue” all victims present in the play-
ground by ”picking them up” and ”dropping them off”
at hospitals (these two actions are performed virtually,
with only a sound emitted to signify that an action has
been performed). This rescue can be carried out by
robots controlled by humans and by robots controlled
by autonomous programs, bearing in mind that au-
tonomous robots only have access to:
• the initial positions of the other robots;
• victims and hospitals positions;
• playground configuration;
• movements carried out by other robots.
Due to the difficulty, encountered during the 2019
DriveToGæther contest, of motivating people to par-
ticipate and prepare their own robots in advance, we
decided to organize the event in the same spirit as the
Jam Generation of texts which are poetic or fun or
both, (Bosser et al., 2022), described above. More-
over, in order to make the event easier to organize,
we proposed to develop a central server to which all
information is transmitted, this server is in charge of
managing automatic refereeing, the robots’ actions on
the playground, as well as the entire game progres-
sion. The game is described by the rules referred be-
low, it involves several tasks.
• the development of a server enabling clients to
play and/or follow games,
• development of a client (agent observer) display-
ing a virtual dashboard,
• development of a basic client (agent driver) that is
able to communicate with the server
• set up a fleet of physical robots (mbots) that obey
the server.
4.1 Rules
The aim is not only to produce autonomous robots,
but also to get these computer-controlled robots to
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
408
work together with human-driven robots and towards
a common goal. The robots symbolize cars on the
move in a city. In this city, there are both autonomous
cars (controlled by a computer program) and cars
driven by humans. Unfortunately, city dwellers can
suffer illness or accidents, in which case they are
called victims, and it is necessary to get all the victims
to hospitals and do this as quickly as possible while
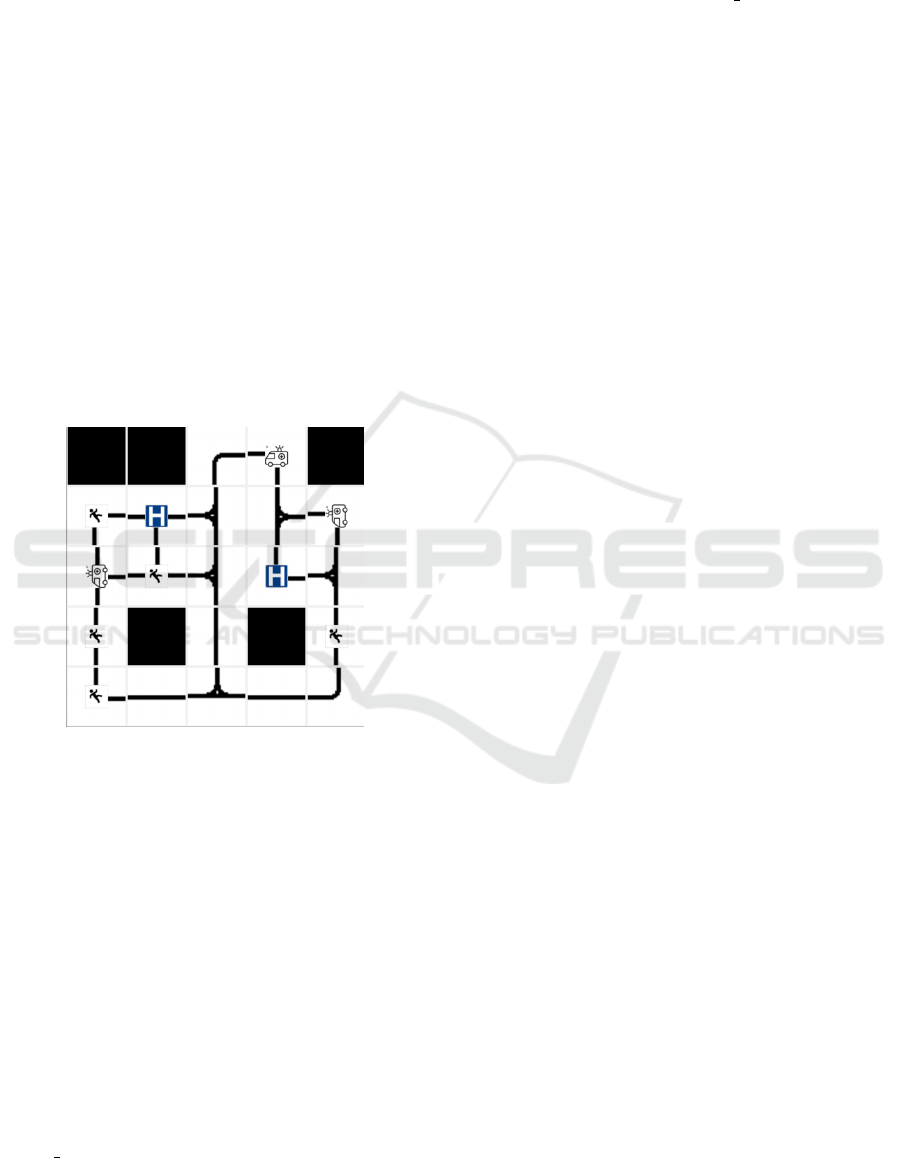
avoiding collisions with other rescuers. An example
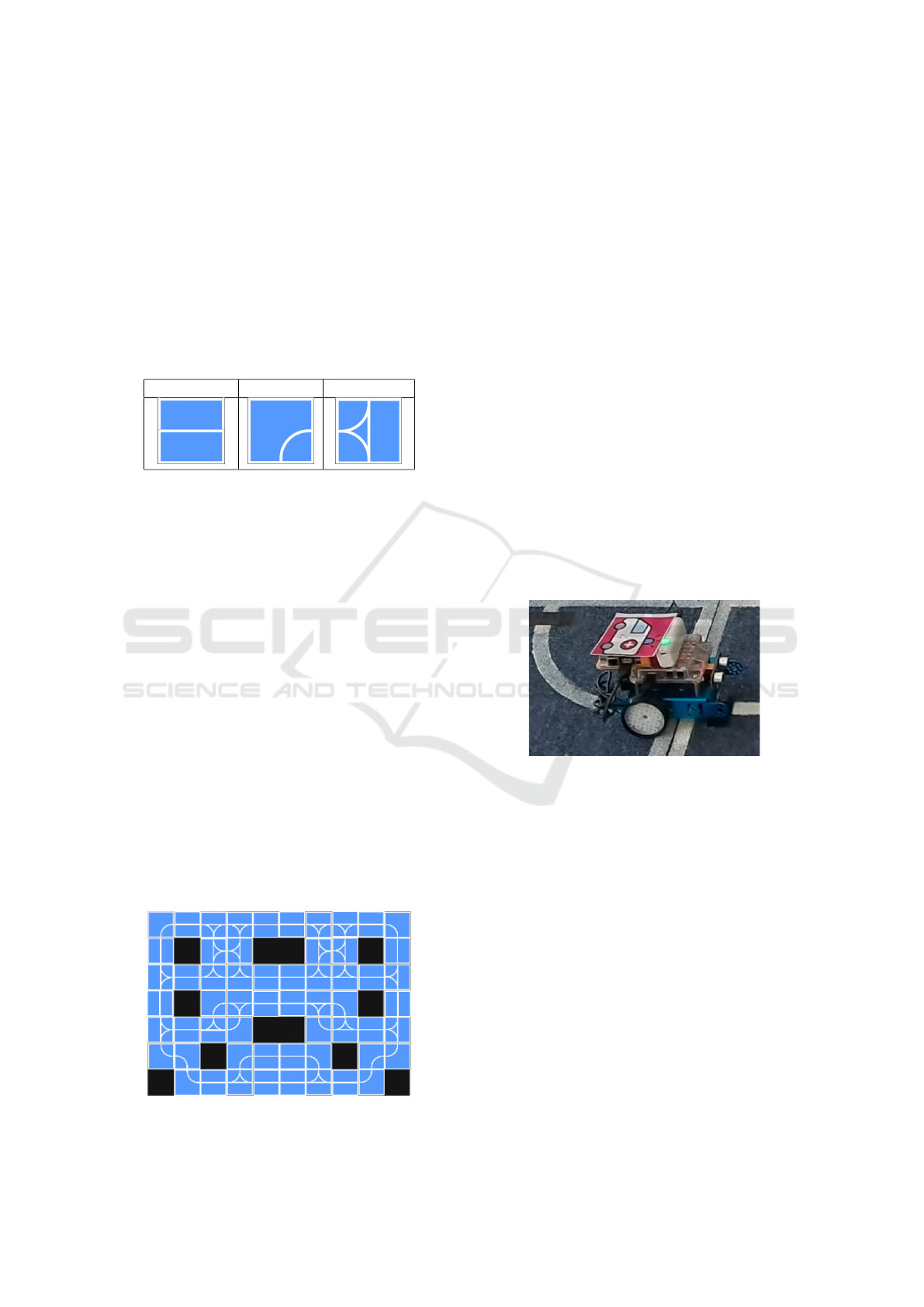
of city map made up of lines to follow is described on
figure 6. There are three types of tiles (all of square
size (50x50 cm)) as shown in Figure 5.
Straight line Turn Intersection
Figure 5: The three types of tiles.
There are three types of zones of interest: robots
start positions, victim positions and hospital posi-
tions. These positions are only given at the start of
each match. The rules of the games contain the fol-
lowing constraints:
1. A robot is considered to occupy a cell when part
of it is on the carpet tile corresponding to this cell.
2. A robot must not enter an occupied cell.
3. The robots follow the lines and never stop be-
tween two cells: any instruction makes it either
to stay in its cell or to entirely move into another
distinct cell.
4. The robots signal when they have picked up a
victim and when they have dropped their victims
off with one/two beep(s) respectively. The robots
have a limited carrying capacity of at most two
victims at a time.
5. The (human or autonomous) driver does not have
direct access to the robots. The driver should send
instructions to a central server that will move the
Figure 6: An example of playground map.
robot, only if authorized. The instructions are:
• Move (go straight ahead): requires the robot to
be on a cell that is not an intersection
• Right (take the most right line): requires the
robot to be at an intersection
• Left (take the most left line): requires the robot
to be at an intersection
• Drop (drop off all the victims): requires the
robot be transporting victims
• Pick (pick up a victim): requires a victim on the
cell where the robot is
• NOP (do nothing)
4.2 The Physical Platform
Our equipment consisted of 60 carpet tiles that we
painted with turns, straight lines and intersections, 6
mbots with 6 Raspberry Pi 3, plugged with their own
batteries and sticked on the mbots roofs. The com-
mands sent by the central server were transmitted to
the Raspberry Pi via an internet connexion and then
transmitted to the mbot via a wired connexion (see
Figure 7).
Figure 7: Mbot with Raspberry Pi 3 and battery on its top.
The mbots and the Raspberry Pi are programmed
in Arduino Language, mbots are programmed to wait
for instructions and to move accordingly, while fol-
lowing the lines, and to stop in the next carpet tile.
The Raspberry Pi are programmed to transmit instruc-
tions to the mbots. Both implementations use the
“SoftwareSerial” library (which simulates the func-
tionalities of a micro controller card).
The central server is responsible for:
• loading the initial configuration of the playground
(an interface allows the user to enter the number of
players, the number of robots, the start positions
of the robots, the places of victims and hospitals,
the dimensions of the playground and the config-
uration of the tiles),
• checking if the command sent by a (human or au-
tomatic) driver towards a robot is feasible,
DriveToGæther: A Turnkey Collaborative Robotic Event Platform
409
• transmitting validated orders to robots and inform
all users of the actions successfully completed,
• showing publicly the current state of the game.
4.3 The Virtual Platform
The virtual platform developped in Python during
the event is shown in Figure 8, it allows the user
to simulate the movement of agents in a config-
urable environment. Two essential configuration files,
terrain.txt and config.txt, are used to define the
placement of agents, victims, and hospitals:
• terrain.txt: Specifies the terrain’s rectangular
shape and employs specific characters to define el-
ements such as obstacles.
• config.txt: Describes the initial position of
each agent, using the same dimensions as
terrain.txt. Each agent is identified by a num-
ber and an orientation.
Figure 8: Virtual platform.
The simulation is managed by the Robot and Sim-
ulator classes, with a graphical user interface (GUI)
for real-time visualization. The Robot class repre-
sents the agents in the simulated world. Robots have
attributes such as their position and orientation. The
doAction() method is essential for a robot to ran-
domly choose from the six possible actions (Drop,
Pick, Move, Left, Right, Uturn). When feasible, this
method prioritizes Drop and Pick over the other ac-
tions. In the absence of any available action, the
doAction() method will opt for Nop (No Operation).
The Simulator class manages the evolution of the sim-
ulated world and provides a graphical interface for
real-time simulation visualization. It handles robot
movement, victim picking and dropping, and verifies
the validity of actions taken by robots through the
check action() method. If an action chosen by a
robot is incorrect, it returns Nop.
This simulator can potentially be used for commu-
nication with physical robots and for managing their
movements through its check action() method.
Furthermore, its graphical user interface (GUI) can
serve as a visual tool for monitoring the progression
of the robots within the environment.
5 RESULTS AND DISCUSSION
Around fourty persons participated to this jam, the
playground was open from 10 a.m. to 6 p.m. during
5 days at the heart of a national conference (attended
by nearly 500 persons). Among the results produced
by the jam participants we have:
• a visual interface for editing a playground,
• a simulator for moving robots on the playground,
• a driver based on simplex algorithm,
• a driver based on goal ordering with Dijkstra,
• a driver programmed with reinforcement learning.
To sum up, we have successfully elaborated a plat-
form enabling to test whether a robot (and more pre-
cisely the program driving this robot) is intelligent.
By ”intelligent”, we do not mean here that robots
would pass a Turing test, but that robots are capable of
intelligently collaborate with humans, without receiv-
ing orders nor anything else than indications about the
performed motions of the other robots. Here are the
advantages of our platform:
• open source for educational or research purposes:
our platform acts as a simulator for cooperative
planning, reinforcement learning and other A.I.
approaches,
• reproducible thanks to the description given here
and on github,
• accessible: mbots, raspberry Pis, carpet tiles are
cheap and readily available on the market,
• our event is not a competition, it is a jam were
everyone can contribute,
• our platform considers A.I. as a tool to help hu-
mans: A.I. is not a rival nor a lier.
• our platform is applied and concrete, with impor-
tant and easy to understand challenges,
• it is easy to use both for the organizers and partic-
ipants (who write source code on site) hence have
a light preparation work,
• the platform success can be quantified in terms of
number of participants, but also in terms of variety
of algorithm ideas.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
410

We claim originality since most organized events
about robotics are competitions that focus on the can-
didate planners ability to solve each problem and on
their speed — not on their adaptability to humans.
Take for instance the ICAPS conference series
7
, it is a
forum dedicated to planning and scheduling research,
and it includes competitions among planners
8
that are
made more for enhancing performances of robots than
for increasing human-robot cooperation.
Note that, we do not exclude to take part to some
competitions, thanks to the development done by our
jam members, indeed a future application of this work
could involve a participation to e.g. the Urban Chal-
lenge and the Grand DARPA Challenge, in which real
robotized vehicles must find their way in a city or in
a desert to reach a final point: with real vehicles, real
obstacles and real goals to achieve.
More generally, we aim at evolving towards a col-
laborative game in which robots need to collaborate
to reach goals (e.g. to enable an access to knowl-
edge, or to a treasure, or to take pictures of monsters)
while guessing other robots intentions (see (Ges-
nouin, 2022)). This evolution would be included in
the challenges that we want to organize under the
form of open jams, with in mind the idea of getting
everyone involved to help drive AI forward. Ulti-
mately, the biggest challenge is to get humans and
machines to work together, taking advantage of the
machine computational capabilities (good at answer-
ing questions) and human imagination (good at asking
them), to create a fruitful cooperation, a centaur-AI.
REFERENCES
Bosser, A.-G., Ermakova, L., Dupin de Saint Cyr, F.,
De Loor, P., Charpenay, V., P
´
epin-Hermann, N., Al-
caraz, B., Autran, J.-V., Devillers, A., Grosset, J., et al.
(2022). Poetic or humorous text generation: jam event
at PFIA2022. In 13th Conference and Labs of the
Evaluation Forum (CLEF 2022), pages 1719–1726.
CEUR-WS. org.
Case, N. (2018). How to become a centaur. Journal of
Design and Science.
Dassault-Aviation (2018). Human machine interface. Tech-
nical report.
9
.
Ermakova, L., Bosser, A.-G., Jatowt, A., and Miller, T.
(2023). The JOKER Corpus: English–French parallel
data for multilingual wordplay recognition. In Proc.
7
International Conference on Automated Planning and
Scheduling, see the last event at https://icaps23.icaps-
conference.org/
8
https://icaps23.icaps-conference.org/competitions/
9
https://www.dassault-aviation.com/en/
group/about-us/innovation/artificial-intelligence/
human-machine-interface/
46th Int. ACM SIGIR Conf. on Research and Dev. in
Information Retrieval.
Fernandez Davila, J. L., Longin, D., Lorini, E., and Maris,
F. (2021). A simple framework for cognitive planning.
Proceedings of the AAAI Conference on Artificial In-
telligence, 35(7):6331–6339.
France 3 Auvergne (2016). Une comp
´
etition de robots en
Lego dot
´
es d’IA
`
a clermont-ferrand. https://france3-
regions.francetvinfo.fr/auvergne-rhone-alpes/puy-
de-dome/clermont-ferrand/competition-robots-lego-
dotes-intelligence-artificielle-clermont-ferrand-
1035983.html.
Gesnouin, J. (2022). Analysis of pedestrian movements and
gestures using an on-board camera to predict their in-
tentions. Technical report, Mines.
He, H., Peng, N., and Liang, P. (2019). Pun Generation with
Surprise. In Proc. Conf. N. American Chap. of As-
soc. for Comput. Linguistics: Human Language Tech.,
pages 1734–1744.
Henry, K. E., Kornfield, R., Sridharan, A., Linton, R. C.,
Groh, C., Wang, T., Wu, A., Mutlu, B., and Saria, S.
(2022). Human–machine teaming is key to ai adop-
tion: clinicians’ experiences with a deployed machine
learning system. Nature, Digital Medecine, 5:97.
Lemaignan, S., Warnier, M., Sisbot, E. A., Clodic, A.,
and Alami, R. (2017). Artificial cognition for social
human-robot interaction: An implementation. Artifi-
cial Intelligence, 247:45–69.
Morignot, P., Rastelli, J. P., and Nashashibi, F. (2014). Ar-
bitration for balancing control between the driver and
adas systems in an automated vehicle: Survey and
approach. In 2014 IEEE Intelligent Vehicles Symp.
Proc., pages 575–580. IEEE.
Nashashibi, F. (2019). White paper on the autonomous and
connected vehicles (in French). Technical Report
10
,
INRIA.
Paull, L., Tani, J., Ahn, H., Alonso-Mora, J., Carlone, L.,
Cap, M., Chen, Y. F., Choi, C., Dusek, J., Fang,
Y., et al. (2017). Duckietown: an open, inexpensive
and flexible platform for autonomy education and re-
search. In 2017 IEEE Int. Conf. on Robot. and Autom.
(ICRA), pages 1497–1504.
Valitutti, A., Toivonen, H., Doucet, A., and Toivanen,
J. M. (2013). “Let Everything Turn Well in Your
Wife”: Generation of Adult Humor Using Lexical
Constraints. In Proc. 51st Annual Meeting of Assoc.
for Comput. Linguistics, pages 243–248.
Van de Cruys, T. (2020). Automatic poetry generation from
prosaic text. In Proc. 58th Annual Meeting of Assoc.
for Comp. Linguistics, pages 2471–2480.
Van-Horenbeke, F. A. and Peer, A. (2021). Activity, plan,
and goal recognition: A review. Frontiers in Robotics
and AI, 8:643010.
Weller, O., Fulda, N., and Seppi, K. (2020). Can humor
prediction datasets be used for humor generation? Hu-
morous headline generation via style transfer. In Proc.
2nd W. on Figurative Language Processing, pages
186–191.
10
https://www.inria.fr/en/
white-paper-inria-autonomous-connected-vehicles
DriveToGæther: A Turnkey Collaborative Robotic Event Platform
411
