Towards Self-Adaptive Resilient Swarms Using Multi-Agent
Reinforcement Learning
Rafael Pina
a
, Varuna De Silva
b
and Corentin Artaud
c
Institute for Digital Technologies, Loughborough University London, 3 Lesney Avenue, London, U.K.
Keywords:
Cooperative Swarms, Multi-Agent Reinforcement Learning, Adaptation.
Abstract:
Cooperative swarms of intelligent agents have been used recently in several different fields of application.
The ability to have several units working together to accomplish a task can drastically extend the range of
challenges that can be solved. However, these swarms are composed of machines that are susceptible to
suffering external attacks or even internal failures. In cases where some of the elements of the swarm fail, the
others must be capable of adjusting to the malfunctions of the teammates and still achieve the objectives. In
this paper, we investigate the impact of possible malfunctions in swarms of cooperative agents through the use
of Multi-Agent Reinforcement Learning (MARL). More specifically, we investigate how MARL agents react
when one or more teammates start acting abnormally during their training and how that transfers to testing.
Our results show that, while common MARL methods might be able to adjust to simple flaws, they do not
adapt well when these become more complex. In this sense, we show how independent learners can be used
as a potential direction of future research to adapt to malfunctions in swarms using MARL. With this work,
we hope to motivate further research to create more robust intelligent swarms using MARL.
1 INTRODUCTION
Cooperative swarms play an important role in multi-
ple applications in the modern world (Liekna et al.,
2014; Dias et al., 2021). When we think about it,
there is a wide range of different fields that come to
mind: manufacturing, defence and security, agricul-
ture, and healthcare, to name a few (Jahanshahi et al.,
2017; Rodriguez et al., 2021; Hildmann and Kovacs,
2019; Hunjet et al., 2018). Swarms can be naturally
seen in assembly lines in factories, or when consid-
ering human-machine cooperation in warehouses. In
agriculture, it is common to see swarms of agents for
smart applications (Qu et al., 2022), or in healthcare
to monitor certain complex cases (Jahanshahi et al.,
2017). In the context of defence, swarms of intelligent
drones can be used to control certain areas and ensure
better communication (Hunjet et al., 2018). Regard-
less of the field of application, it is always important
to ensure that the systems are functioning properly.
In other words, it is important to ensure that the ele-
ments in the swarm are performing as expected and
a
https://orcid.org/0000-0003-1304-3539
b
https://orcid.org/0000-0001-7535-141X
c
https://orcid.org/0009-0002-0387-235X
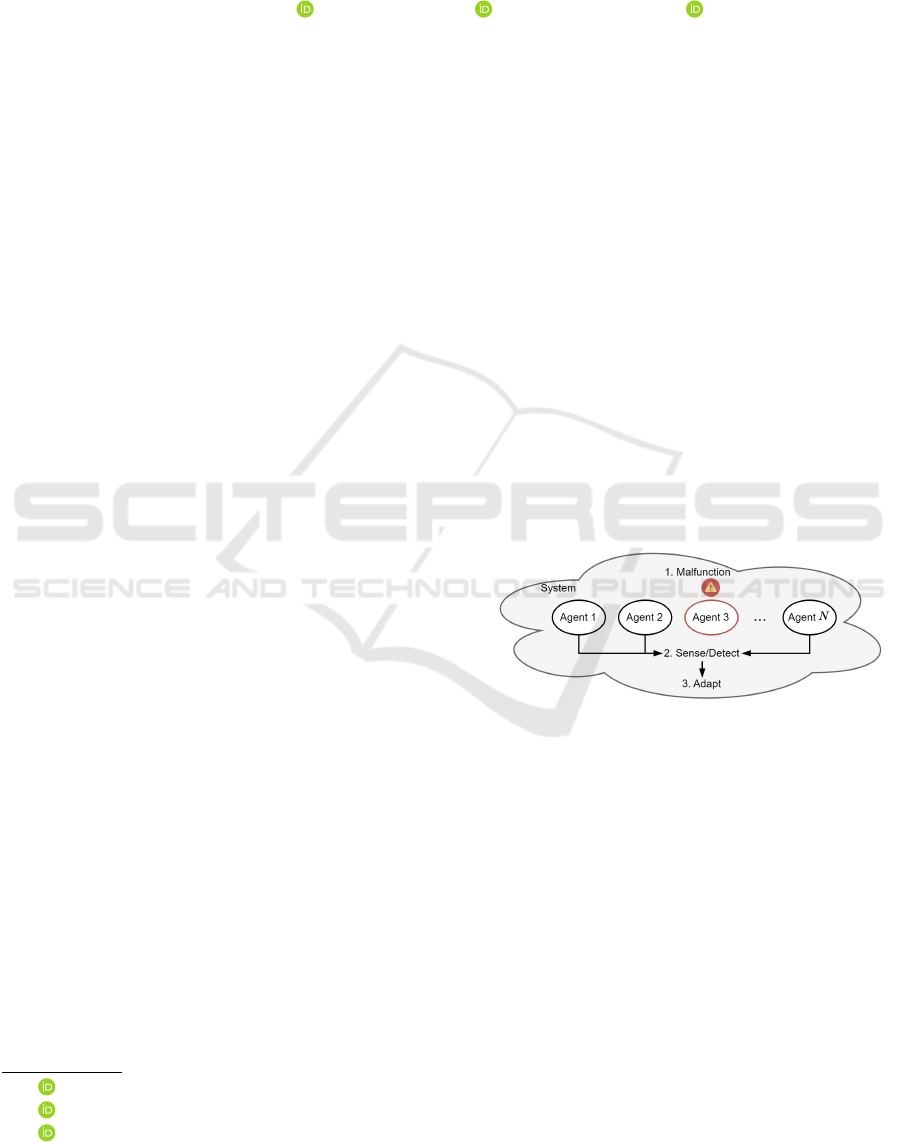
Figure 1: Illustration of the considered scenarios. When a
malfunction affects the elements of a swarm, the remaining
ones must be able to understand that and adapt.
are cooperating with the others.
Note the case of malfunctions that might occur in
some of the elements of a certain swarm. These can
be caused, for example, by external cyberattacks, by
failures in a communication network, or even sim-
ply by internal unexpected flaws of one of the ele-
ments. These types of malfunctions can cause se-
rious problems in the tasks that the swarm is try-
ing to accomplish. If one of the entities is affected,
it might also affect the performance of the rest of
the swam, resulting in catastrophic consequences that
could be avoided (Christensen et al., 2009; Revill,
2016). In this paper, we investigate precisely this
problem, from a Multi-Agent Reinforcement Learn-
ing (MARL) perspective. MARL allows the devel-
410
Pina, R., De Silva, V. and Artaud, C.
Towards Self-Adaptive Resilient Swarms Using Multi-Agent Reinforcement Learning.
DOI: 10.5220/0012462800003654
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2024), pages 410-417
ISBN: 978-989-758-684-2; ISSN: 2184-4313
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

opment of extremely advanced and specialised be-
haviours within a swarm of cooperative agents (Al-
brecht et al., 2024). However, what if one of the
agents incurs into a flaw? Are the other agents pre-
pared to adapt to it? It is crucial that agents are ca-
pable of demonstrating this type of behaviour and are
able to not only identify but also positively react to
potential malfunctions of one or more of the elements
of the swarm. In the case of such flaws, maintaining
the good functioning of the swarm can prevent major
consequences.
Along these lines, in this paper, we investigate
scenarios where a swarm of agents attempts to solve
a cooperative task. We aim to evaluate where the
agents can naturally react to unexpected flaws in the
behaviours of the teammates. In complex cases where
they cannot adapt, we hypothesise a solution for them
to adjust themselves and still be able to hold and per-
form reasonably until the others either recover or are
replaced. Achieving this optimal behaviour can be
key to address real problems where groups of agents
need to improvise and react to unexpected situations
where one of their reliable teammates incurs into an
unforeseen impairment.
Overall, in this paper, we discuss potential prob-
lems that might occur within swarms and affect their
performance holistically. As illustrated in Figure 1,
when a malfunction incurs into one agent in a swarm,
the others must understand that and adapt to it in or-
der to still achieve their objectives. Through MARL,
in this work, we delve into the implications of mal-
functions in swarms and we identify future ways of
research as a product of our results.
2 RELATED WORK
Swarms have been tipped to solve multiple emerging
applications, including precision agriculture, search
and rescue, disaster response and relief, surveillance
and land administration and wildlife protection. In
(Jurt et al., 2022), a swarm of warehouse robots was
programmed to safely transport large and arbitrarily
shaped objects towards a target direction that did not
require prior knowledge of the object or the number of
agents required. Some of these applications include
very novel methods to address global challenges, such
as climate change related scenarios. For example, a
forest firefighting system based on the use of a swarm
of hundreds of UAVs able to generate a continuous
flow of extinguishing liquid on the fire front is con-
ceptualised in (Ausonio et al., 2021).
In the same context of UAV swarms, to execute
reconnaissance and strike tasks under insufficient en-
emy information and potential synergy between tar-
gets, a distributed task allocation method is proposed
for heterogeneous UAV swarms in (Deng et al., 2023).
The distributed system of the allocation of tasks does
not depend on a highly reliable network nor a cen-
tral node of control and thus improves the reliability
and scalability of the swarm. In (Deng et al., 2023),
all the task allocations and task executions are imple-
mented as online optimisation and hardcoded heuris-
tic algorithms for conflict resolution, negotiation and
planning.
Most of the networked UAV swarm control
methodologies are based on the mathematical model
of flocking, in which three basic rules of, separa-
tion, alignment, and cohesion are simulated to achieve
flocking-like behaviour. A model-free distributed
intelligent controller is designed in (Jafari and Xu,
2018) to maintain the motion of all agents in the flock
in the events of network-induced delay. The low com-
plexity learning-based method is developed based on
the computational model of emotional learning ob-
served in the mammalian limbic system (Mor
´
en and
Balkenius, 2000).
In (Hildmann et al., 2019), the authors addressed
the scenarios where several UAVs are operating as a
single functional unit, which is a swarm, to provide
real-time data from their individual directed sensing
equipment. The partial coverage from individual de-
vices is to be combined with data from other devices
to offer full coverage of a target object or area. This is
a typical application of UAV swarms for surveillance
such as reconnaissance, search and rescue, and data
collection tasks such as precision agriculture. In the
algorithm proposed in (Hildmann et al., 2019), a UAV
swarm is able to autonomously adapt to changing res-
olution requirements for specific locations within the
area under surveillance. The algorithm is inspired
by how termites construct their nests, where without
direct inter-agent communication, the members of a
colony allow their decision-making to be guided by
their environment.
In (Majd et al., 2020), the authors addressed the
problem of safe and efficient routing of a swarm of
drones through a parallel evolutionary-based swarm
mission planning algorithm (Majd et al., 2020). Evo-
lutionary computing allowed to plan and optimize the
routes of the drones at run-time to maximize safety
while minimising travelling distance as the efficiency
objective.
Besides the biological-inspired approaches de-
scribed, Reinforcement Learning (RL) has also been
used in the context of swarms. For instance, in
(Thumiger and Deghat, 2021) a MARL-based decen-
tralised collision avoidance system in a swarm of ho-
Towards Self-Adaptive Resilient Swarms Using Multi-Agent Reinforcement Learning
411

mogenous agents is proposed, where a trained con-
troller is tested in simulation and in a real-world 3-
dimensional drone environment. Similarly, strategies
in multi-UAV collaborative air combat scenarios can
be learned through MARL (Li et al., 2022). MARL-
based cooperative navigation of a swarm of UAVs is
developed through MARL and Curriculum learning
to facilitate and expedite convergence, under different
task complexities.
With the potential threat of UAV swarms in mod-
ern battlefields, developing countermeasures against
them as a form of defence has been studied. There
are two broad categories of harming swarms: hard
kill where the physical components are destroyed by
means such as high-power RF signals that destroy
UAV components, or soft-kill methods that employ
hacking tactics to interfere with the robot’s control
mechanisms such as providing false navigation com-
mands (Zhang et al., 2023). For example, when
achieving cooperative flight by the swarm of UAVs,
moments prior to it, the system is in a disordered
state and vulnerable to a malicious attack. In (Zhang
et al., 2023), authors develop countermeasures against
a UAV swarm by developing a low intensity continu-
ous radio inference scheme to degrade the communi-
cation between the drones.
Despite all the applications in swarms here men-
tioned, these are still liable to several threats to their
normal behaviour and performance by means such as
the ones described previously. Under such scenarios
of attacks, the agents must still be able to recover and
react accordingly to potential flaws. In this sense, in
this paper, we investigate the robustness of swarm in-
telligence. Specifically, we are interested in dynamic
behaviour learned through MARL and how agents re-
act and adapt to potential malfunctions that might oc-
cur within their trusted swarm.
3 BACKGROUND
3.1 Decentralised Partially Observable
Markov Decision Processes
(Dec-POMDPs)
In this paper, we model our scenarios as Decen-
tralised Partially Observable Markov Decision Pro-
cesses (Dec-POMDPs). The reason to do so is be-
cause in most of the realistic scenarios involving
swarms of agents they only have partial perceptions
of the surroundings and cannot observe everything at
any moment. Additionally, swarms naturally model
interactions among agents. In our setting, we focus
specifically on cooperative settings to evaluate how
agents react to failures within their swarm.
Thus, we consider a problem defined by the tu-
ple G = (S, A,r, N, Z, P, O,γ), where S represents the
state of the environment, from which each agent i ∈
N ≡ {1, . . . , N} draws an observation o
i
∈ O(s, i) :
S ×N → Z at each timestep t. At each timestep, each
agent chooses an action a
i
∈ A, forming a joint action
a ≡ a
1
, . .. , a
N
that is performed at state s of the envi-
ronment, resulting in a transition of state according to
the probability function P(s
′
|s, a) : S ×A × S → [0, 1],
where s
′
is the next resulting state, and γ ∈ [0, 1)
is a discount factor. During learning, each agent i
holds an observation-action history τ
i
such that τ
i
∈
T = (Z × A)
∗
. The policies of the agents are condi-
tioned on the respective history, π(a
i
|τ
i
) : T × A →
[0, 1]. At each timestep t the team receives a joint re-
ward r(s, a) : S × A → R, leading to the objective of
finding a joint policy π that maximises the objective
Q
π
(s
t
, a
t
) = E
π
[R
t
|s
t
, a
t
], where R
t
=
∑
∞
k=0
γ
k
R
t+k
is
the discounted return.
3.2 Deep Reinforcement Learning
Reinforcement Learning (RL) has been around for
some time (Sutton and Barto, 2018). One of the firstly
proposed methods is named Q-learning (Watkins and
Dayan, 1992). This algorithm follows the lines of
dynamic programming and aims to learn an optimal
Q-function that dictates the best actions to execute at
each moment of a certain problem, based on its cur-
rent state. The updates of the Q-function are made
following the equation
Q(s, a) ← (1 − α)Q(s, a) + α(r + γmax
a
Q(s
′
, a)).
(1)
However, working on the tabular case has limita-
tions (Albrecht et al., 2024). For instance, tabular
Q-learning cannot approximate states that it has not
seen before, even if they are simply slightly different.
Thus, in (Mnih et al., 2015) the authors have extended
simple Q-learning to Deep Q-Networks (DQNs) that
use deep learning approaches and hence are capable
of learning outside of tabular settings. This extends
drastically the range of problems that can be solved
using reinforcement learning, allowing to learn an ap-
proximation for potentially infinite spaces. The DQN
is trained to minimise the loss
L(θ) = E
b∼B
h
r + γmax
a
′
Q(s
′
, a
′
θ
′
) − Q(s, a; θ)
2
i
,
(2)
where θ and θ
′
are the parameters of a learning net-
work and its target, respectively, and b is some sample
sampled from a batch B.
Following the foundations of these approaches,
the authors in (Tan, 1993) have demonstrated how
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
412
DQN can be used to train multiple agents indepen-
dently, giving rise to one of the first MARL ap-
proaches. In this work, we explore cooperative en-
vironments that can be solved using MARL and use
more complex recent approaches. Additionally, these
also adopt recurrent DQNs in order to account for
partial observability, as per (Hausknecht and Stone,
2015). In the experiments in this paper, we use in-
dependent learners that use recurrent DQNs. We re-
fer to this method as Independent Deep Q-Learning
(IDQL).
3.3 Value Function Factorisation in
MARL
There are several types of methods in the literature of
MARL suitable to solve cooperative problems such
as the ones portrayed in this paper. Amongst them,
we opt to focus on value function factorisation meth-
ods (Sunehag et al., 2017; Rashid et al., 2020; Pina
et al., 2022). The key idea of these methods is to
learn an efficient decomposition of a joint Q-function
into a set of individual action-value functions. This al-
lows the agents to have partial access to the policies of
the others during training, but they execute actions in
the environment following only their individual pol-
icy functions.
Thus, we can summarise this decomposition pro-
cess as the following:
Q
tot
(τ, a) = f (Q
1
(τ
1
, a
1
), . . . , Q
N
(τ
N
, a
N
)), (3)
where f represents a function (neural network) that
learns a mix that should adhere to a factorisation
condition named Individual Global-Max (IGM). This
condition can be defined as
argmax
a
Q
tot
(τ, a) =
argmax
a
1
Q
1
(τ
1
, a
1
)
.
.
.
argmax
a
N
Q
N
(τ
N
, a
N
)
(4)
In our experiments, we make use of QMIX
(Rashid et al., 2020), one of the most popular value
function factorisation methods in the MARL litera-
ture. This method complies with the IGM condition
in (4) due to a structural constraint inherent to its fac-
torisation process, referred to as a monotonicity con-
straint, defined as
∂Q
tot
(τ,a)
∂Q
i
(τ
i
,a
i
)
> 0, ∀i ∈ {1, . . . , N}. In-
tuitively, this means that the joint and all individual
functions should be evolving in the same direction
(Rashid et al., 2020).
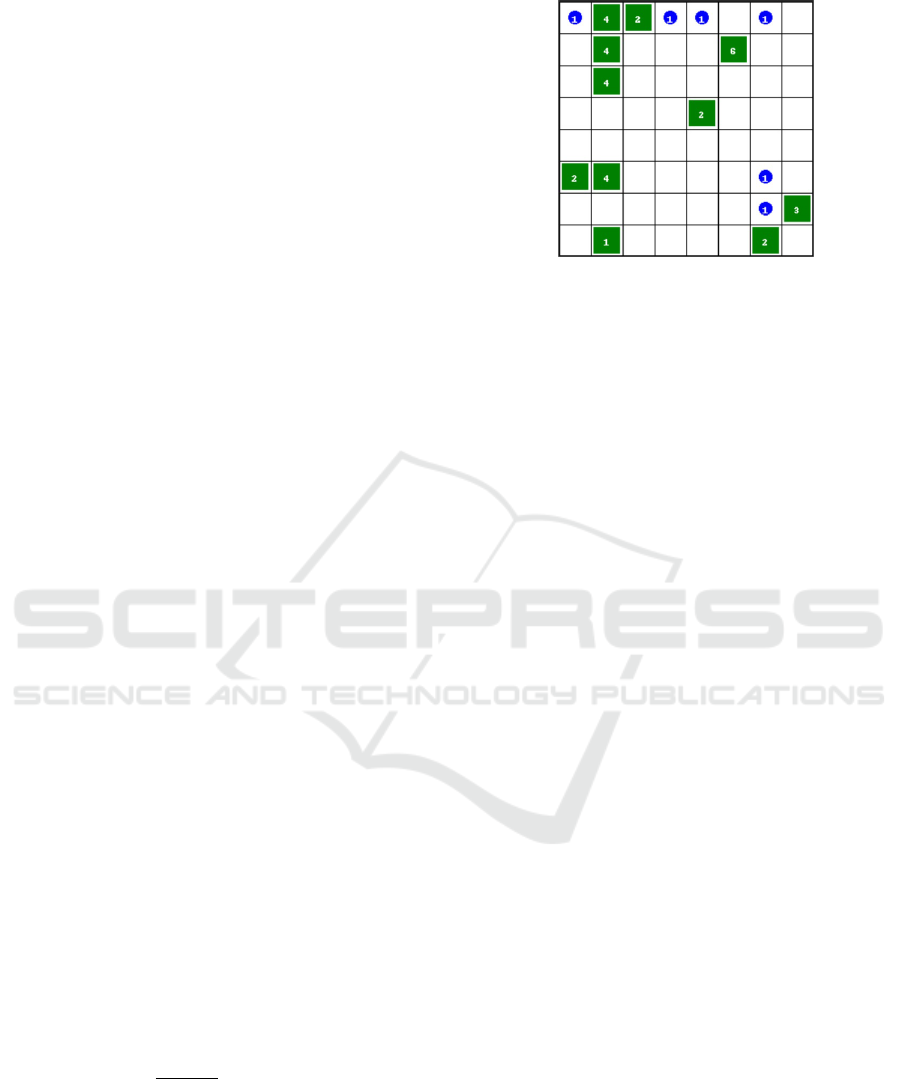
Figure 2: Lumberjacks environment with 6 agents (blue cir-
cles). The number inside the green squares represents the
level of the tree, i.e., the number of agents needed to cut it.
4 METHODS AND SETTING
To evaluate our hypothesis, we use MARL with the
objective of studying the level of robustness of swarm
intelligence. Specifically, we intend to investigate the
issue of malfunctioning agents within a swarm of co-
operative agents, i.e., all agents expect every other
agent to cooperate in a given task, but, in the case of
malfunction, the agents should understand to ignore
the potentially malicious agents. The objective is that
the resultant agents are robust for the perturbations
caused by an individual or a subset of malfunctioning
agents.
4.1 The MARL Environment
The environment used in the experiments is named
Lumberjacks and, in this environment, a team of 6
agents must learn cooperative strategies in order to
cut all the existing trees in the world of the map (Fig-
ure 2). Every time a tree is cut, there is a reward of
+5 for each agent. Note that these rewards are then
summed and given as the team reward that is shared
by the agents. The task becomes challenging because
each tree has a pre-defined assigned level that dictates
the number of agents needed at the same time to cut
that specific tree. Logically, this requires their coop-
eration as a group. In addition, there is a step penalty
of –0.01 that is given to each agent at every time step
until the end of the episode. The episode terminates
either when all the trees are gone or when a limit of
100 timesteps is reached. Logically, the higher the
number of agents cooperating, the higher will be the
reward received by the team.
Towards Self-Adaptive Resilient Swarms Using Multi-Agent Reinforcement Learning
413

4.2 Experimental Setup
To evaluate our hypothesis, we design an experimen-
tal setup that consists of two main stages: 1) training
the MARL agents in the described environment with-
out any changes and 2) testing the learned policies
in the same environment but one of the agents of the
team starts executing random actions instead of fol-
lowing the learned policy (agent malfunction). Addi-
tionally, to test the hypothesis, we also train a varia-
tion of the training stage 1, where part of the agents
fail during training, that is, part of the agents start
executing random actions at a certain interval during
training. We refer to this training scheme as Adap-
tive Training. With this additional experiment, we in-
tend to investigate whether we can train the agents to
anticipate during training these kinds of unexpected
situations of system failures. In all the experiments
we use the centralised training decentralised execu-
tion (CTDE) method QMIX, as described in section
3.3.
5 EXPERIMENTS AND
DISCUSSIONS
With the experiments presented in this section we in-
tend to evaluate the following hypothesis: if we train
a team of N MARL agents to solve a certain cooper-
ative task, the team will struggle to re-adapt if one or
more of the N elements start acting unexpectedly after
the entire team is trained (that is, at evaluation/testing
time).
5.1 Main Results
Figure 3 illustrates the results of the experimental
stage 1 (as described in section 4.2). We can see that
the agents can achieve a high reward in this task when
they are trained using a strong MARL algorithm such
as QMIX (Figure 3(a)). However, when we move the
learned policies to the second stage (testing, as de-
scribed in section 4.2), we can see that the induced
changes in the scenario have an impact on the agents’
behaviour (Figure 4). By looking at Figure 4, we ob-
serve that, while the agents still perform at a high level
under normal conditions, when we make one agent act
randomly the performance of the team decreases sub-
stantially. This raises the need for creating intelligent
agents that are capable of actively reacting to these
kinds of unexpected events. For instance, in certain
real scenarios that require multi-agent cooperation, if
there is a system malfunction in one of the agents, the
remaining agents should be able to react to the prob-
(a)
(b)
(c)
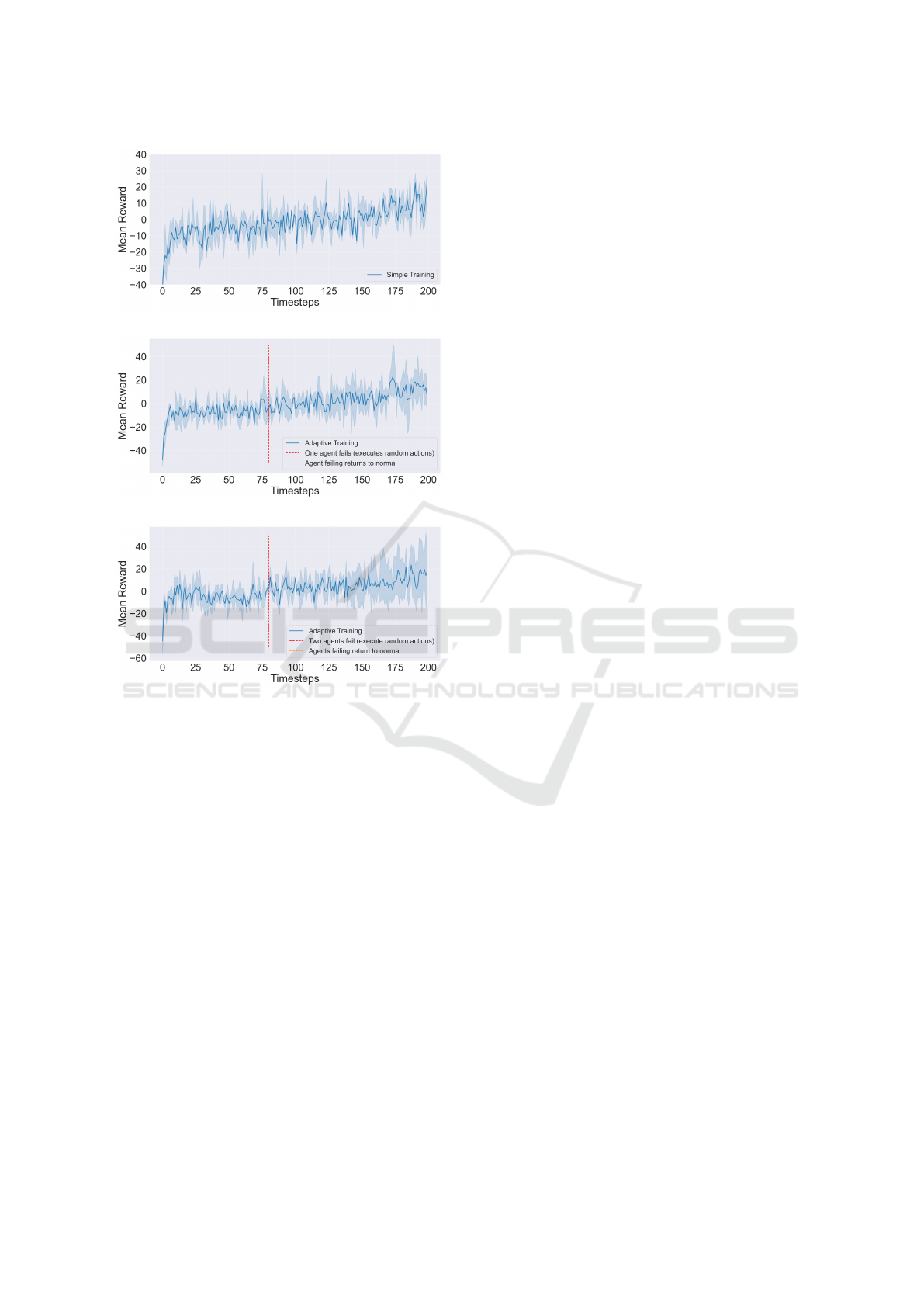
Figure 3: Training rewards over 2M timesteps. From top
to bottom, (a) shows the performance of QMIX in an envi-
ronment without malfunctions. (b) shows the performance
of QMIX but during a period of timesteps (800k-1M) one
agent acts randomly. (c) show the performance of QMIX
but during a period of timesteps (800k-1.5M) two agents
act randomly.
lem and adapt to the failure that occurred within the
team.
Conversely, when we introduce one failure dur-
ing the training of the team (Figure 3(b)), we can see
that, although during training there is a break of per-
formance that concurs with the moment of the intro-
duction of the failure, the team will be better prepared
to react to unexpected failures during the evaluation
time (second stage) (Figure 4). Figure 3(b) shows a
performance decrease from the moment of the intro-
duction of a failure until roughly the moment when
the agent recovers, that is, when the malfunctioning
agent stops doing random actions and returns to act-
ing according to the policy being learned. From the
moment the failure ends, the team ends up achiev-
ing the same optimal performance as achieved by the
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
414
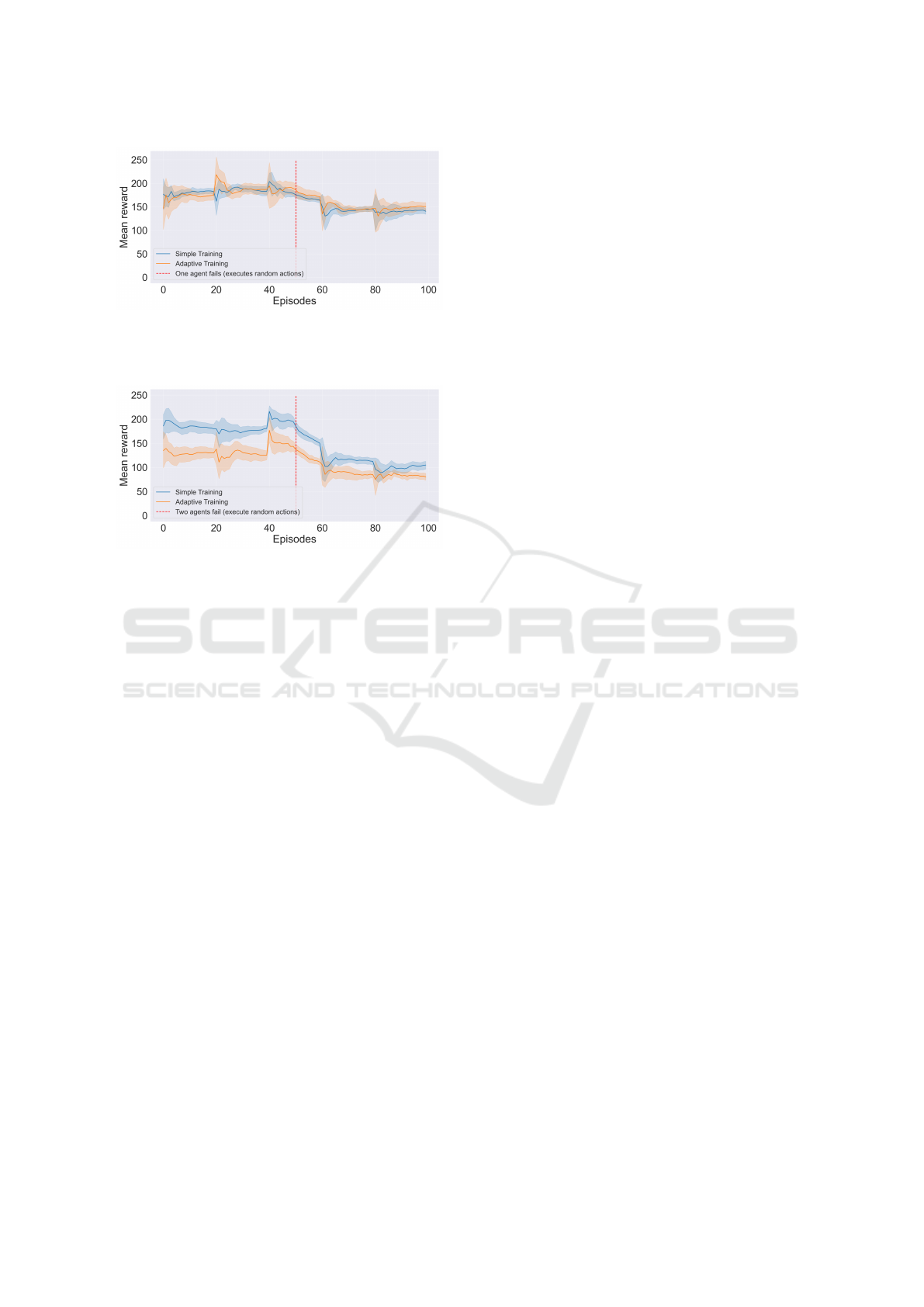
Figure 4: Evaluation of the agents over 100 episodes, but
after 50 episodes one of the agents starts doing random ac-
tions (failure).
Figure 5: Evaluation of the agents over 100 episodes, but
after 50 episodes two of the agents start doing random ac-
tions (two failures).
normal training as depicted in Figure 4. When the
learned policies are transferred to the evaluation phase
(stage 2), we can see that the team demonstrates good
behaviour not only under normal environment con-
ditions but also when a failure is introduced during
the evaluation phase. When compared to the policies
naively trained, the policies trained that encountered a
failure during training achieve the same performance
under normal conditions. Importantly, these policies
also allow to improve the reward received when a fail-
ure occurs in the system. The presented results en-
force the need for training more conscious agents in
MARL that can react to unexpected failures in the el-
ements of the team and still be capable of operating
successfully when the others fail.
5.2 Additional Experiments
To further investigate our hypothesis, we extend the
experiments carried out in the previous section to
make two agents fail instead of only one. Following
the same logic, we evaluate the performance of the
agents trained under normal conditions in this setting
(Figure 3(a)) and the performance of agents that have
experienced the failure of two agents during training
(as depicted in Figure 3(c)). While during training the
evolution of the rewards achieved over time is simi-
lar to the previous experiments, Figure 5 shows that,
when we evaluate the agents after training in a sce-
nario where two elements fail, the rewards achieved
decrease substantially for both training methods (nor-
mal and adaptive with two failures). In fact, the adap-
tive training that has seen two failures during training
seems to be even more affected in this case, as op-
posed to the results with only one failure in Figure 4.
This observation suggests that the occurrence of
two failures during training becomes confusing for
the agents when learning the task as a team. This
opens space for further research on how we can create
more robust methods that are capable of accounting
for an arbitrary number of failures and still perform
well.
5.3 Results with Independent Learners
(IDQL)
We have seen in the previous sections how the training
phase of QMIX method is drastically affected when
there is a malfunction in some of the agents of the
swarm. We hypothesise that this performance drop
can be due to the mixer of this method that is de-
scribed in section 3.3. Since some of the agents incur
into failures and perform random actions, the factori-
sation process during the centralised stage will be af-
fected. This leads us to think that, one step towards
improving reactions to these failures can be to use
fully independent learners instead of using a mixer
during a centralised step.
In Figure 6 we demonstrate the results for the
same scenario, but now using fully independent learn-
ers (IDQL, as described in section 3.2). That is, these
agents are trained in a fully decentralised and inde-
pendent manner, by simply updating their Q-networks
following the loss in (2). As the figure shows, the
significant drops in performance during training that
we observed in the previous figures do not exist any-
more. Now, the performances are somewhat consis-
tent between normal training (Figure 6(a)) and train-
ing with malfunctions of the agents (one malfunction
in Figure 6(b) and two in Figure 6(c)). However, it
is important to note that the rewards achieved in this
case are far from being optimal. With the previous
method, the agents can achieve much higher rewards
in the task, meaning that, despite naive independent
learners seeming to be more robust to malfunctions
within the team, they are still not good enough to op-
timally solve complex tasks such as the one hereby
presented. Thus, these insights highlight the need to
develop stronger methods that can act in a fully inde-
pendent manner. Novel strong independent methods
can in fact be key to solve complex tasks, providing
improved robustness at the same time.
Towards Self-Adaptive Resilient Swarms Using Multi-Agent Reinforcement Learning
415
(a)
(b)
(c)
Figure 6: Training rewards over 2M timesteps. From top
to bottom, (a) shows the performance of IDQL in an envi-
ronment without malfunctions. (b) shows the performance
of IDQL but during a period of timesteps (800k-1M) one
agent acts randomly. (c) show the performance of IDQL
but during a period of timesteps (800k-1.5M) two agents
act randomly.
6 CONCLUSION AND FUTURE
WORK
Swarms of intelligent agents are becoming increas-
ingly popular in diverse applications. Despite their
notorious advantages, they are still subject to poten-
tial attacks or internal flaws that they may not be able
to control. Creating robust units that can positively
react to these malfunctions can be key to developing
stronger cooperative swarms.
In this paper, we investigated the effect of mal-
functions within a trusted swarm of agents from a co-
operative MARL perspective. We demonstrated that
agents may not recover when some of their teammates
incur into failures and start acting abnormally. While
the proposed training scheme seems to be robust to
simple failures (one agent), when these become more
complex, it fails. Our results show that using indepen-
dent learners can be a solution to create more resilient
agents, but these may not be good enough to learn
complex tasks properly. This motivates further work
to find a middle ground between independent learners
and other non-independent complex methods that can
be both resilient and solve complex problems.
Along these, it is important to train entities that
can not only find the patterns that correspond to po-
tential malfunctions within their trusted swarm but are
also able to react and adapt to them. With our results,
we hope to motivate further research in this matter. In
the future, we intend to further investigate this prob-
lem by creating more robust independent agents. Ad-
ditionally, we aim to test these methods in real scenar-
ios.
ACKNOWLEDGEMENTS
This work was funded by the Engineering and Physi-
cal Sciences Research Council in the United Kingdom
(EPSRC), under the grant number EP/X028631/1.
REFERENCES
Albrecht, S. V., Christianos, F., and Sch
¨
afer, L. (2024).
Multi-Agent Reinforcement Learning: Foundations
and Modern Approaches. MIT Press.
Ausonio, E., Bagnerini, P., and Ghio, M. (2021). Drone
swarms in fire suppression activities: A conceptual
framework. Drones, 5(1):17.
Christensen, A. L., OGrady, R., and Dorigo, M. (2009).
From fireflies to fault-tolerant swarms of robots.
IEEE Transactions on Evolutionary Computation,
13(4):754–766.
Deng, H., Huang, J., Liu, Q., Zhao, T., Zhou, C., and Gao, J.
(2023). A distributed collaborative allocation method
of reconnaissance and strike tasks for heterogeneous
uavs. Drones, 7(2):138.
Dias, P. G. F., Silva, M. C., Rocha Filho, G. P., Vargas, P. A.,
Cota, L. P., and Pessin, G. (2021). Swarm robotics: A
perspective on the latest reviewed concepts and appli-
cations. Sensors, 21(6):2062.
Hausknecht, M. and Stone, P. (2015). Deep recurrent q-
learning for partially observable mdps. In 2015 aaai
fall symposium series.
Hildmann, H. and Kovacs, E. (2019). Using unmanned
aerial vehicles (uavs) as mobile sensing platforms
(msps) for disaster response, civil security and public
safety. Drones, 3(3):59.
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
416

Hildmann, H., Kovacs, E., Saffre, F., and Isakovic, A.
(2019). Nature-inspired drone swarming for real-time
aerial data-collection under dynamic operational con-
straints. Drones, 3(3):71.
Hunjet, R., Fraser, B., Stevens, T., Hodges, L., Mayen,
K., Barca, J. C., Cochrane, M., Cannizzaro, R., and
Palmer, J. L. (2018). Data ferrying with swarming uas
in tactical defence networks. In 2018 IEEE interna-
tional conference on robotics and automation (ICRA),
pages 6381–6388. IEEE.
Jafari, M. and Xu, H. (2018). Biologically-inspired intel-
ligent flocking control for networked multi-uas with
uncertain network imperfections. Drones, 2(4):33.
Jahanshahi, M. R., Shen, W.-M., Mondal, T. G., Abdelbarr,
M., Masri, S. F., and Qidwai, U. A. (2017). Recon-
figurable swarm robots for structural health monitor-
ing: a brief review. International Journal of Intelligent
Robotics and Applications, 1:287–305.
Jurt, M., Milner, E., Sooriyabandara, M., and Hauert, S.
(2022). Collective transport of arbitrarily shaped ob-
jects using robot swarms. Artificial Life and Robotics,
27(2):365–372.
Li, S., Jia, Y., Yang, F., Qin, Q., Gao, H., and Zhou, Y.
(2022). Collaborative decision-making method for
multi-uav based on multiagent reinforcement learn-
ing. IEEE Access, 10:91385–91396.
Liekna, A., Grundspenkis, J., et al. (2014). Towards practi-
cal application of swarm robotics: overview of swarm
tasks. Engineering for rural development, 13:271–
277.
Majd, A., Loni, M., Sahebi, G., and Daneshtalab, M.
(2020). Improving motion safety and efficiency of
intelligent autonomous swarm of drones. Drones,
4(3):48.
Mnih, V., Kavukcuoglu, K., Silver, D., Rusu, A. A., Ve-
ness, J., Bellemare, M. G., Graves, A., Riedmiller, M.,
Fidjeland, A. K., Ostrovski, G., et al. (2015). Human-
level control through deep reinforcement learning. na-
ture, 518(7540):529–533.
Mor
´
en, J. and Balkenius, C. (2000). A computational model
of emotional learning in the amygdala. From animals
to animats, 6:115–124.
Pina, R., De Silva, V., Hook, J., and Kondoz, A. (2022).
Residual q-networks for value function factorizing in
multiagent reinforcement learning. IEEE Transac-
tions on Neural Networks and Learning Systems.
Qu, C., Boubin, J., Gafurov, D., Zhou, J., Aloysius, N.,
Nguyen, H., and Calyam, P. (2022). Uav swarms
in smart agriculture: Experiences and opportunities.
In 2022 IEEE 18th International Conference on e-
Science (e-Science), pages 148–158. IEEE.
Rashid, T., Samvelyan, M., De Witt, C. S., Farquhar, G., Fo-
erster, J., and Whiteson, S. (2020). Monotonic value
function factorisation for deep multi-agent reinforce-
ment learning. The Journal of Machine Learning Re-
search, 21(1):7234–7284.
Revill, M. B. (2016). UAV swarm behavior modeling for
early exposure of failure modes. PhD thesis, Mon-
terey, California: Naval Postgraduate School.
Rodriguez, I., Mogensen, R. S., Schjørring, A., Razza-
ghpour, M., Maldonado, R., Berardinelli, G., Adeo-
gun, R., Christensen, P. H., Mogensen, P., Madsen,
O., et al. (2021). 5g swarm production: Advanced
industrial manufacturing concepts enabled by wire-
less automation. IEEE Communications Magazine,
59(1):48–54.
Sunehag, P., Lever, G., Gruslys, A., Czarnecki, W. M.,
Zambaldi, V., Jaderberg, M., Lanctot, M., Sonnerat,
N., Leibo, J. Z., Tuyls, K., et al. (2017). Value-
decomposition networks for cooperative multi-agent
learning. arXiv preprint arXiv:1706.05296.
Sutton, R. S. and Barto, A. G. (2018). Reinforcement learn-
ing: An introduction. MIT press.
Tan, M. (1993). Multi-agent reinforcement learning: Inde-
pendent vs. cooperative agents. In Proceedings of the
tenth international conference on machine learning,
pages 330–337.
Thumiger, N. and Deghat, M. (2021). A multi-agent deep
reinforcement learning approach for practical decen-
tralized uav collision avoidance. IEEE Control Sys-
tems Letters, 6:2174–2179.
Watkins, C. J. and Dayan, P. (1992). Q-learning. Machine
learning, 8:279–292.
Zhang, X., Bai, Y., and He, K. (2023). On countermea-
sures against cooperative fly of uav swarms. Drones,
7(3):172.
Towards Self-Adaptive Resilient Swarms Using Multi-Agent Reinforcement Learning
417
