
A Multilevel Strategy to Improve People Tracking in a Real-World
Scenario
Cristiano B. de Oliveira
1,2 a
, Joao C. Neves
3 b
, Rafael O. Ribeiro
4 c
and David Menotti
1 d
1
Department of Informatics, Federal University of Paran
´
a, Curitiba, Brazil
2
Federal University of Cear
´
a, Quixad
´
a, Brazil
3
University of Beira Interior, NOVA-LINCS, Portugal
4
National Institute of Criminalistics, Brazilian Federal Police, Curitiba, Brazil
Keywords:
People Tracking, Dataset, Video Surveillance, Pal
´
acio Do Planalto.
Abstract:
The Pal
´
acio do Planalto, office of the President of Brazil, was invaded by protesters on January 8, 2023.
Surveillance videos taken from inside the building were subsequently released by the Brazilian Supreme Court
for public scrutiny. We used segments of such footage to create the UFPR-Planalto801 dataset for people
tracking and re-identification in a real-world scenario. This dataset consists of more than 500,000 images.
This paper presents a tracking approach targeting this dataset. The method proposed in this paper relies on the
use of known state-of-the-art trackers combined in a multilevel hierarchy to correct the ID association over
the trajectories. We evaluated our method using IDF1, MOTA, MOTP and HOTA metrics. The results show
improvements for every tracker used in the experiments, with IDF1 score increasing by a margin up to 9.5%.
1 INTRODUCTION
On January 8, 2023, the Pal
´
acio do Planalto, main
office of the President of Brazil, was invaded by
protesters who alleged that there was fraud in the
presidential elections. Nearly three months after
these events, the Brazilian Supreme Court released
all the footage from that day to the public access
(Gabinete de Seguranc¸a Institucional, 2023). The re-
leased footage is composed by surveillance videos
1
that show the activities in several locations inside the
building during the whole day. We used pieces of such
footage to create the UFPR-Planalto801 dataset
2
.
This dataset contains images of a real-world surveil-
lance scenario and it is mainly intended for use in the
development of security systems, specially regarding
people tracking and re-identification.
On constructing this dataset, we conducted exper-
iments by using state-of-the-art tracking approaches
a
https://orcid.org/0000-0003-2320-2724
b
https://orcid.org/0000-0003-0139-2213
c
https://orcid.org/0000-0002-6381-3469
d
https://orcid.org/0000-0003-2430-2030
1
Available for download in https://drive.presidencia.
gov.br/public/615ba7
2
https://web.inf.ufpr.br/vri/databases/ufpr-planalto801
on the selected pieces of footage. Each of the used
approaches presented flaws on keeping consistent tra-
jectories, mainly due to a high number of miss iden-
tified people. Therefore, alongside with the UFPR-
Planalto801 dataset (Section 4), this paper presents
WindowTracker, a tracking strategy (Section 5) that
combines pairs of trackers into a multilevel hierarchy
to correct the ID association over the trajectories.
For the experiments (Section 6) we used six dif-
ferent trackers and combined them in a total of
twelve pairs. The trackers are: ByteTrack (Zhang
et al., 2022), BotSORT (Aharon et al., 2022), Strong-
SORT (Du et al., 2023), OC-SORT (Cao et al., 2023),
Deep OC-SORT (Maggiolino et al., 2023) and Hy-
bridSORT (Yang et al., 2023). All these trackers
are able to work with online and real-time videos,
and have achieved good results running on datasets
like DanceTrack (Sun et al., 2022) and MOTChal-
lenge (Dendorfer et al., 2019)(Dendorfer et al., 2020).
Each of the pairs was then compared to the indi-
vidual trackers in order to assess the effectiveness of
this pairing system. The results (Section 7) show im-
provements for every tracker used in the experiments,
with IDF1 (Ristani et al., 2016) score increasing by
a margin from 2.1% (ByteTrack and BotSORT) up to
9.5% (Deep OC-SORT).
130
de Oliveira, C., Neves, J., Ribeiro, R. and Menotti, D.
A Multilevel Strategy to Improve People Tracking in a Real-World Scenario.
DOI: 10.5220/0012460000003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 4: VISAPP, pages
130-137
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

2 PEOPLE TRACKING
The Multiple Object Tracking (MOT) problem en-
tails the simultaneous tracking of multiple objects
in a video. This requires a manner for identifying
them consistently throughout the frames in order to
establish their trajectories (or tracks) along the video.
Pedestrian tracking in video constitutes a specific in-
stance of MOT wherein the objects of interest are the
individuals present in the video.
A common paradigm used in MOT tasks is to split
the problem in two main steps, which are detecting
the objects each frame and then associate them to pre-
vious detected objects. This association occurs across
frames by tagging all detected objects with an unique
ID number, in such way that all objects that share
the same ID are considered the same tracked object.
Errors from both detection and association steps im-
pact the overall results of the tracking process. This
paradigm is known as Tracking by Detection (TBD).
TBD trackers often employ techniques like
Kalman filters (KF) for modeling motion and to esti-
mate objects positions based on previously computed
trajectories. Besides avoiding the tracker to work with
a batch of detections regarding an object, such kind of
modeling also helps it to correct detection errors.
In addition to motion prediction, trackers also
rely on features gathered from the bounding boxes
surrounding the detected objects. Such features are
usually considered to perform the re-identification of
objects for the association step. There are several
re-identification proposals in the literature, ranging
from those based on metrics such as Intersection over
Union (IoU) to more complex deep learning models.
3 RELATED WORK
ByteTrack is a tracking method that executes a two-
step association process in order to use all detected
bounding boxes to determine the objects tracklets. At
first, ByteTrack only tries to match bounding boxes
with high-confidence values while the remaining ones
are used in a subsequent step. The algorithm uses IoU
as a distance metric for the association between the
detected and predicted objects. When associating the
low-confidence bounding boxes, ByteTrack tries to
identify which ones correspond to object detections
and which correspond to the background of the im-
age by computing their similarities with tracklets that
have not yet been associated.
In addition to ByteTrack, this paper works with
a number of state-of-the-art methods for pedestrian
tracking based on the SORT algorithm (Bewley et al.,
2016). These methods use strategies similar to Byte-
Track (Zhang et al., 2022), employing more than one
step for associating the bounding boxes.
SORT (Simple Online and Real-time Tracking) is
a tracking algorithm designed for real-time applica-
tions. SORT is known for its simplicity, speed, and
real-time tracking capabilities in videos. It imple-
ments an estimation model to keep the tracking state
via KF. The assignment of the detections to the tracks
relies on a cost matrix of IoU distances between de-
tected and predicted bounding boxes. SORT may
struggle in complex scenarios with heavy occlusion,
no-linear movement or frequent appearance changes.
These situations may require modifications on SORT,
which has inspired other tracking approaches.
BotSORT (Aharon et al., 2022) derives from
SORT by introducing modifications to the state vector
in KF. Such modifications aims to improve the fitting
of bounding boxes by including values for their height
and width. Another difference regarding SORT is the
use of a camera motion compensation module based
on optical flow. It also relies on appearance Re-ID
descriptors from a ResNet50 backbone network along
with the IoU distances to perform associations.
StrongSORT (Du et al., 2023) is mainly derived
from DeepSORT (Wojke et al., 2017), which was
one of the earliest SORT-like method that applied
deep learning to tracking. A key difference between
StrongSORT and Deep SORT is the detector they use.
While Deep SORT uses a CNN with two convolu-
tion layers, StrongSORT uses the YOLOX (Ge et al.,
2021) detection model. In terms of motion predic-
tion, StrongSORT also differs from Deep SORT by
using a Kalman NSA filter (Du et al., 2021). Two
other features implemented in StrongSORT are the
Camera Motion Compensation and Exponential Mov-
ing Average modules. The former uses e technique to
improve correlation coefficient maximization, and the
latter tries to enhance long-term association.
OC-SORT (Cao et al., 2023) is a method designed
to enhance tracking robustness under occlusion and
non-linear object motion (when objects exhibit vari-
able velocities within a given time interval). It in-
cludes the strategy of generating updated iterations
of the KF based on virtual trajectories created by a
module referred as ”Observation-Centric Re-Update”
(ORU), which relies on historical observations. ORU
is meant to reduce occlusion error accumulation over
time, particularly when objects are not under active
tracking. Objects that were not tracked for an interval
can be revisited, allowing the reactivation of previ-
ously inactive tracklets. OC-SORT tackles non-linear
motion by inserting a term denoted as ”Observation-
Centric Momentum” (OCM) within the association
A Multilevel Strategy to Improve People Tracking in a Real-World Scenario
131
cost matrix, computed considering the direction of
object motion during the association process.
Deep OC-SORT (Maggiolino et al., 2023) mod-
ifies OC-SORT for enhancing the precision and ro-
bustness of associations. Its tracking model is tuned
with dynamic information about the visual appear-
ance of objects. Deep OC-SORT identifies situations
such as occlusion or blur based on detections confi-
dence. Detections with low values are rejected during
the similarity cost computation. Thus, the process is
adapted to amplify the significance of appearance fea-
tures considering instances of high-quality detections.
The HybridSORT (Yang et al., 2023) central idea
is to modify strategies used in other trackers to in-
clude information typically considered less signifi-
cant. HybridSORT considers that the object’s height
is related to camera depth, while the confidence value
can indicate the occurrence of occlusions, a premise
similar to what is incorporated in Deep OC-SORT.
Thus, it modifies the OCM module of OC-SORT to
include height and confidence, proposing two new
modules: Tracklet Confidence Modeling and Height
Modulated IoU. HybridSORT uses the same two-step
association strategy as ByteTrack but includes a third
step to reactivate tracklets, similar to OC-SORT. Like
StrongSORT, HybridSORT includes an EMA mod-
ule, using cosine distance to calculate the similarity
between the predicted and detected features.
4 PROPOSED DATASET
The UFPR-Planalto801 dataset is composed by
videos taken from several locations inside the Pal
´
acio
do Planalto, during protesters invasion on a Sunday,
January 8, 2023. These videos are part of the footage
released to the public by Brazilian Supreme Court.
Despite the releasing of 1557 videos recorded that
day, videos taken before the invasion occurs (around 3
pm) typically show still images of empty rooms. This
dataset is intended for tasks related to people tracking
and therefore we selected and clipped parts of videos
in order to gathering interesting pieces of footage on
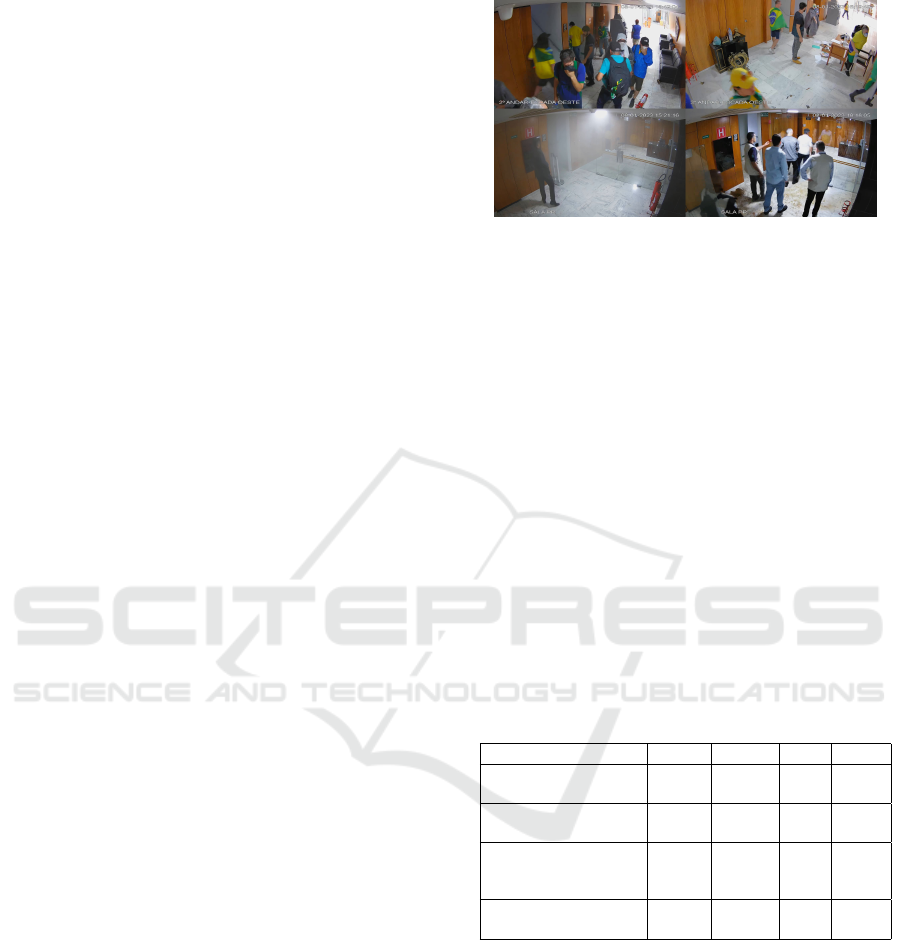
people activities after the invasion time. Figure 1
shows examples of scenes from footage, showing im-
ages from 3 different rooms, besides situations with
the presence of smoke and glass reflections.
The UFPR-Planalto801 dataset contains 14 videos
of several lengths, with a resolution of 1920x1080
pixels and encoded to 24 FPS. There are approxi-
mately 6 hours of video, with a total of 518050 frames
and 510471 annotated detections. Table 1 shows a
comparison between UFPR-Planalto801 and others
datasets commonly used in MOT.
Figure 1: Examples of scenes captured on footage.
In order to preserve the complexity of a real-world
scenario, we kept detections of people within irregular
framing (as in Figure 2). This increases the challenge
on working with UFPR-Planalto801 and also differ-
entiates it from others datasets. For a matter of com-
parison, people in DanceTrack (Sun et al., 2022) are
mainly framed in full body (with few exceptions).
In all videos of the UFPR-Planalto801 dataset
there are frames with no detections. Such frames were
not removed in order to preserve the videos integrity,
since during a normal ongoing footage there will not
be any video editing. Besides that, in many situa-
tions a person who left the scene reappears after a few
frames in a very unlikely location (e.g., a different
entrance). This can be challenging because it often
results in errors in tracking state, leading the tracker
to misidentify this person and to start a new tracklet,
what increases the number of track fragments.
Table 1: Comparison between UFPR-Planalto801 and other
commonly used MOT datasets (approximated values).
Dataset Frames Minutes Boxes Tracks
DanceTrack
106k 88 877k 990
(Sun et al., 2022)
MOT17
11k 23 900k 1342
(Milan et al., 2016)
MOT20
13k 9 2M 3456
(Dendorfer et al.,
2020)
UFPR-Planalto801
518k 359 514k 736
(ours)
The UFPR-Planalto801 dataset was annotated ac-
cording to the MOTChallenge format and relying on
a semi-automatic strategy. People were automatic de-
tected using YOLOv8 (Jocher et al., 2023), which
also provided tracking information but with many as-
sociation errors for our scenario. Thus, we manually
reviewed the ID association for every bounding box,
in order to assure that one single person is bound to
only one ID. This ID consistence is maintained only
through one video and a person may appear in an-
other video tied to a different ID. During this review
process, bounding boxes showing no people were dis-
carded, and others were corrected as needed.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
132
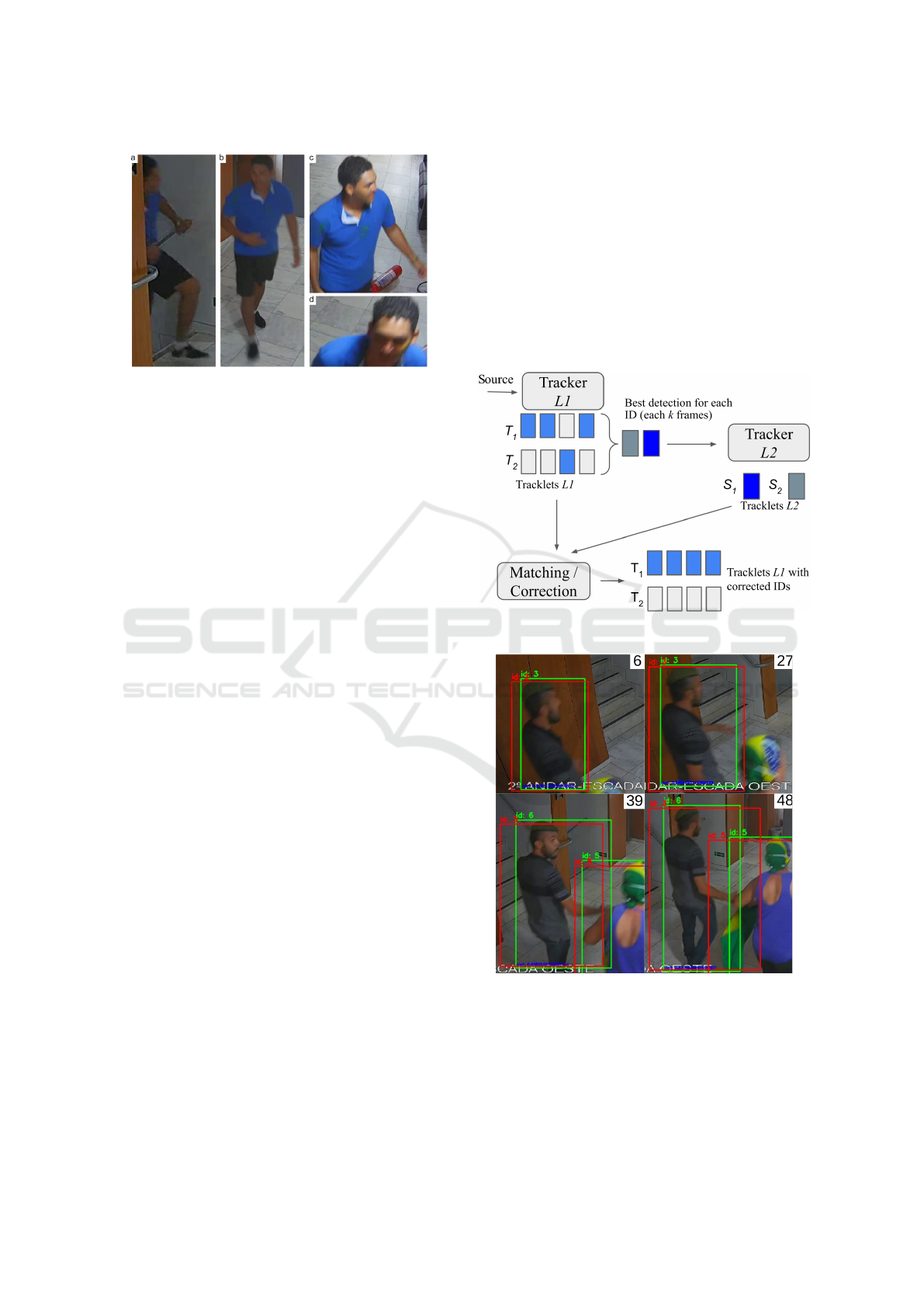
Figure 2: Framing of people in the proposed dataset: (a)
occluded; (b) full body; (c) upper body; and (d) head only.
5 PROPOSAL
Experiments with state-of-the-art trackers show that
one of the main issues with the UFPR-Planalto801
dataset is the high number of wrongly associated IDs.
These ID association errors normally occurs when in-
dividuals are using similar clothes, performing irreg-
ular trajectories, crossing paths and so on. Another
cause is high level of tracks fragmentation due to the
fact that many people leaves the scene and reappears
after a while at an unexpected position.
Considering that, we applied a multilevel strategy,
named as WindowTracker, where trackers are orga-
nized to process different levels of detections. Its gen-
eral idea is to combine the results of two trackers,
referred as trackers Level 1 (L1) and Level 2 (L2).
While L1 process every detection, L2 only operates
over the ones with high confidence detection scores.
The selection of the best detections is inspired by
the TrADe Re-ID (Machaca et al., 2022) approach.
TrADe aims to match query images of a person to the
corresponding tracklets obtained from video galleries.
After a tracking step for identifying the individual
tracklets in the gallery, TrADe uses an anomaly de-
tection model to find the best representative bounding
box of each tracklet, which are then compared to the
query image. The top-ranked bounding box is consid-
ered the re-identified person or object.
As in TrADe, WindowTracker selects the best
bounding box for a tracked ID. Nevertheless, instead
of using a specific model, it uses the detection con-
fidence as an indicative for high-quality detections,
since situations prone to ID switch, like occlusions,
often produce detections with low confidence scores.
In the WindowTracker approach, the first tracker
(L1) produces the tracklets as in a normal tracking-
by-detection operation, by processing the source
frame by frame and generating the IDs for detected
people in each frame. The result of L1 is a set of
detections that compose the L1 tracklets. Each detec-
tion is bound to the frame number, box coordinates,
confidence score and the associated ID. All these val-
ues are buffered to be further processed by the second
tracker (L2), which runs in periods of k frames.
After a window of k frames, and considering only
the detections in such window, WindowTracker se-
lects the bounding box with the highest confidence
for each ID. L2 takes these bounding boxes as input
and produces a set with the same format as L1, but
with only the top-ranked detection per ID.
Figure 3: WindowTracker (proposal) approach overview.
Figure 4: Example of ID correction using WindowTracker.
This second level of processing has the effect of
creating an alternative tracking state that comprises
only high-quality detections, and then it is expected to
be less prone to identification errors. As an analogy,
a wrong ID can be interpreted as noise in the track-
let, so this multilevel approach acts filtering this noise
A Multilevel Strategy to Improve People Tracking in a Real-World Scenario
133

by reducing the sample frequency. Besides that, this
approach also reduces the impact of problems like oc-
clusion and missed detections. As an example, if L1
and L2 are two different instances of the same tracker,
L1 holds the tracking state for n frames without a new
detection, while L2 will hold it for k × n frames.
Since L1 and L2 are two distinct instances, there
is no correspondence between the IDs they provide.
This may result in a single person being associated
to one ID by L1 and to a different ID by L2. There-
fore, WindowTracker implements an additional step
for matching the IDs taking L2 as reference. Such
step also acts to correct the remaining L1 detections
by replacing them by the matches in L2.
For matching, WindowTracker computes a matrix
of IoU distances per frame in the window. This ma-
trix relates the L1 detections in the frame to L2 de-
tections. The matching is solved by using the Jonker-
Volgenant algorithm (Jonker and Volgenant, 1987) for
linear assignment. Notice that in L2 there is only one
detection for each ID, therefore these detections are
re-used when computing the matrix for all the frames
in the window. Figure 3 presents an overview of the
proposed approach. In this figure, T
1
and T
2
represent
the L1 tracklets, while S
1
and S
2
are the L2 detections.
Figure 4 presents an example of ID correction us-
ing WindowTracker. L1 detections are in green, while
L2 detections are in red. In frames 6 and 27 both L1
and L2 associate a person to the ID 3. In frame 27 L1
wrongly associates the ID 6 to the same person, keep-
ing this new ID in subsequent frames. L2, however,
is more consistent and keeps the same ID through this
video sequence. Notice that there is no apparent situ-
ation to justify this wrong association by L1.
6 EXPERIMENTS SETUP
Despite WindowTracker being agnostic in terms of
what trackers can be used as L1 or L2, for the context
of this paper we evaluated this approach using six pos-
sible trackers as L1 and two as L2. Each of these were
combined to compose the 12 different pairs of track-
ers used in the experiments. Besides that, the exper-
iments also considered different values for k in order
to assess the impact of the frame window size for run-
ning the tracker L2. We considered k ∈ {2, 3, 5, 10}.
For L1 we selected ByteTrack, BotSORT, Strong-
SORT, OC-SORT, Deep OC-SORT and Hybrid-
SORT. For L2 we selected ByteTrack and OC-SORT.
Since neither ByteTrack nor OC-SORT require re-
identification models to compute features, their use as
L2 helps to reduce the overhead required for buffering
detections, since there is no need to keep frames or
appearance features while waiting for L2 to run. The
source code for these trackers is provided by Box-
MOT (Brostr
¨
om, 2023). For trackers that require a
Re-ID model, we used pre-trained models for OS-
Net (Zhou et al., 2019) and CLIP-ReID (Li et al.,
2023), also provided by BoxMOT.
WindowTracker uses YOLOv8 (Jocher et al.,
2023) for people detection. This version is a variant of
YOLO (Redmon et al., 2016), a model widely used in
computer vision tasks. YOLOv8 provides pre-trained
models, including the versions nano, small, medium,
large, and extra-large. Notice that the small version
of YOLOv8 is the one used in WindowTracker de-
spite it is not the best in terms of precision in com-
parison to larger YOLOv8 models. However, it is the
second fastest while still presenting good qualitative
results, what makes it acceptable in our context.
6.1 Evaluation Metrics
The metrics considered for evaluation of Window-
Tracker are the IDF1 Score (Ristani et al., 2016),
Higher Order Tracking Accuracy (HOTA) (Luiten
et al., 2020), Multi-Object Tracking Accu-
racy (MOTA) and Multi-Object Tracking Preci-
sion (MOTP) (Bernardin and Stiefelhagen, 2008).
All these metrics are widely used in the evaluation
of object tracking algorithms and were computed by
using TrackEval (Luiten and Hoffhues, 2020).
MOTA = 1 −
|FN| + |FP|+ |IDSW |
|gtDet|
(1)
MOT P =
1
|T P|
∑
T P
S (2)
IDF1 =
|IDT P|
|IDT P| + 0.5|IDFN| + 0.5|IDFP|
(3)
HOTA =
Z
1
0
p
DetA
α
.AssA
α
dx (4)
MOTA relates the number of ground-truth detec-
tions (gtDet) and the numbers of false positives (FP),
false negatives (FN), and ID switches (IDSW ), as
showed in Eq. (1). MOT P computes the overall mean
error between the estimated and detected positions, as
in Eq. (2), where S is a measure of similarity.
IDF1 is used to assess the accuracy of maintaining
consistent object identities over predicted trajectories
related to the ground truth. IDF1 is computed accord-
ing to Eq. (3), where IDT P (Identity True Positives)
is the number of correctly associated identities, IDFN
(Identity False Negatives) is the number of missed IDs
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
134
and IDFP (Identity False Positives) is the number of
IDs in trajectories not present in the ground truth.
HOTA is a comprehensive metric encompassing a
set of other metrics derived from MOTA and MOT P.
It is designed to assess the accuracy of localization,
detection, and association. As shown in Eq. (4), it
involves integrating geometric means for detection
(DetA) and association (AssA) scores, calculated for
a range of thresholds (α, where 0 ≤ α ≤ 1).
HOTA, MOTA and MOTP give us an general
overview of the proposal efficiency. However, since
our approach is focused on the ID association prob-
lem, we consider IDF1 more relevant to this context.
7 RESULTS
This section presents the results from combining
twelve pairs of trackers L1/L2. Each tracker was also
evaluated without using the WindowTracker scheme
in order to establish the baselines for comparison. For
a matter of clarity, we will address to L1 as the ”base
tracker” when referring to it running solo. The results
are presented considering a pair in comparison to its
respective base tracker. Tables 2 to 7 show the scored
values for all combinations. Tables regarding track-
ers that use a Re-ID model include the results for the
models we used, OSNet and CLIP-ReiD. Notice that
there is no info regarding L2 or k in the top data row of
each of those tables, since these rows show the results
for the base tracker. All score values are presented as
percentage, and the higher values are better.
Overall, the cases with k = 2 or k = 3 are the
ones with the higher IDF1, HOTA and MOTA scores,
while cases with k = 10 perform best considering
MOT P. However, MOT P typically has a very little
variation (from 0.1% to 0.4%) within the set of com-
binations for the same base tracker, resulting in no
real benefit when using k = 10. ByteTrack as L2 gen-
erally performs better than OC-SORT, which shows
the worst results when paired to StrongSORT or Hy-
bridSORT. In such cases, the base tracker outperforms
any combination in terms of IDF1 and HOTA scores,
regardless the value of k or the re-id model. The ex-
ceptions are the cases where HybridSORT is using
CLIP-ReiD and even so there is only a maximum gain
of 0.2% for pairing OC-SORT to HybridSORT.
ByteTrack is the tracker among all base trackers
who performs better. Despite of that, WindowTracker
was able to achieve higher values in every metric for
several combinations. When using ByteTrack as L1,
the best HOTA score occurs when using OC-SORT
as L2 and k = 2. This case achieved a HOTA score of
41.7%. This is also the highest HOTA score in com-
parison to all other trackers combinations. In terms of
IDF1, WindowTracker shows an improvement from
41.1% to 43.2% regarding the base tracker. Table 2
presents the results for ByteTrack used as L1.
Opposite to ByteTrack, OC-SORT is the base
tracker with the lowest values. As shown in Ta-
ble 3, its base values for MOTA, IDF1 and HOTA
are 51.2%, 33.0% and 35.4%, respectively. Its perfor-
mance improved when applying the WindowTracker
strategy. The use of ByteTrack as L2 resulted in val-
ues up to 65.1%, 42.3% and 41.0% for MOTA, IDF1
and HOTA, respectively. These new values consti-
tute the larger improvement achieved for HOTA score
among all assessed base trackers. Using OC-SORT as
both L1 and L2 granted lower scores, but it still pro-
vides some improvement in cases where k ∈ {2, 3}.
Table 4 shows that BotSORT achieved balanced
numbers regarding the use of ByteTrack or OC-SORT
as L2, with no accentuated difference between the
cases where k ∈ {2, 3, 5}. Despite of that, it also
achieved best values with WindowTracker, except
in cases where k = 10. Best HOTA and MOTP
values for BotSORT are 38.0% and 81.6%, respec-
tively, which occurred for both re-identification mod-
els. MOTA score was higher with OSNet (46.3%)
while CLIP-ReiD achieved 39.3% for IDF1 over-
coming the base tracker score of 37.0%.
Table 2: Results for ByteTrack as L1.
Tracker L1 ByteTrack
Tracker L2 k IDF1 HOTA MOTA MOTP
− − 41.1 41.2 64.6 82.7
ByteTrack 2 42.5 41.4 65.0 82.8
ByteTrack 3 43.2 41.6 65.2 82.8
ByteTrack 5 42.4 40.6 65.3 82.9
ByteTrack 10 35.9 35.1 63.5 83.0
OC-SORT 2 42.8 41.7 64.8 82.8
OC-SORT 3 42.9 41.6 64.9 82.8
OC-SORT 5 42.6 40.8 64.8 82.8
OC-SORT 10 34.8 34.2 63.4 82.9
Table 3: Results for OC-SORT as L1.
Tracker L1 OC-SORT
Tracker L2 k IDF1 HOTA MOTA MOTP
− − 33.0 35.4 51.2 81.3
ByteTrack 2 42.3 41.0 65.1 81.6
ByteTrack 3 41.9 40.5 65.0 81.6
ByteTrack 5 41.3 39.9 64.9 81.6
ByteTrack 10 34.0 33.6 62.8 81.7
OC-SORT 2 34.3 35.8 52.1 81.3
OC-SORT 3 34.1 35.5 52.1 81.3
OC-SORT 5 33.4 34.3 51.9 81.3
OC-SORT 10 28.3 29.6 50.6 81.4
The results for StrongSORT with OSNet and
CLIP-ReiD are very close, as Table 5 shows. This
occurs in all combinations, despite using or not the
A Multilevel Strategy to Improve People Tracking in a Real-World Scenario
135
Table 4: Results for BotSORT as L1.
Tracker L1 BotSORT
Re-ID OSNet CLIP-ReID
Tracker L2 k
IDF1
HOTA
MOTA
MOTP
IDF1
HOTA
MOTA
MOTP
− − 36.8 37.1 42.0 81.3 37.0 37.4 41.2 81.3
ByteTrack 2 38.2 37.5 46.0 81.5 38.6 37.9 45.3 81.5
ByteTrack 3 38.9 37.7 46.1 81.4 39.3 38.0 45.4 81.4
ByteTrack 5 38.2 37.2 46.3 81.5 38.3 37.2 45.5 81.5
ByteTrack 10 33.0 32.2 45.4 81.6 32.6 31.9 44.6 81.6
OC-SORT 2 38.5 38.0 42.5 81.3 38.1 37.9 41.8 81.3
OC-SORT 3 38.1 37.2 42.6 81.3 37.7 37.0 41.9 81.3
OC-SORT 5 37.6 36.4 42.7 81.3 37.7 36.5 41.9 81.3
OC-SORT 10 31.3 31.0 41.9 81.4 30.4 30.7 41.1 81.4
Table 5: Results for StrongSORT as L1.
Tracker L1 StrongSORT
Re-ID OSNet CLIP-ReID
Tracker L2 k
IDF1
HOTA
MOTA
MOTP
IDF1
HOTA
MOTA
MOTP
− − 35.9 37.3 52.2 81.3 35.8 37.4 52.3 81.4
ByteTrack 2 42.4 40.8 65.3 81.6 42.5 41.0 65.3 81.7
ByteTrack 3 42.9 41.1 65.2 81.6 42.6 41.1 65.2 81.6
ByteTrack 5 41.2 39.9 65.1 81.6 41.9 40.5 65.1 81.7
ByteTrack 10 34.9 34.2 63.0 81.7 34.7 33.8 63.0 81.7
OC-SORT 2 35.4 36.5 53.1 81.4 35.4 36.5 53.2 81.4
OC-SORT 3 35.9 36.8 53.1 81.4 35.4 36.3 53.3 81.4
OC-SORT 5 34.5 35.0 52.9 81.4 34.1 34.8 53.0 81.4
OC-SORT 10 28.4 29.7 51.5 81.4 28.5 29.7 51.6 81.5
WindowTracker strategy. Best values for IDF1 and
HOTA are with k = 3, achieving, respectively, 42.9%
and 41.1%. Best value for MOTA overcomes the base
tracker in more than 13%. These cases used Byte-
Track as L2. When using OC-SORT as L2, however,
StrongSORT improved only for MOTA and in fact
performed slightly worst than the base tracker. By
observing the results we noticed almost 2× more ID
switches when StrongSORT was paired to OC-SORT
than when paired to ByteTrack. It is important to
point that this high number of ID switches is close
to what occurs for StrongSORT with no pairing.
Similar to StrongSORT, HybridSORT performed
a high number of ID switches and did not achieve
good results with OC-SORT as L2. HybridSORT in-
herits ideas from both StrongSORT and OC-SORT,
which do not present improvements when using OC-
SORT as L2. The reasons for that are still unclear,
but, as a hypothesis, we believe that since they all
originally already try to deal with long-term associa-
tions, relying on virtual trajectories with sparse detec-
tion from OC-SORT have none to little effect. When
using ByteTrack as L2 there is a gain in every metric
for k ∈ {2, 3, 5}, as one can see in Table 6. Best IDF1
score achieved is 43.1% while for HOTA and MOTA,
respectively the best values are 41.2% and 65.1%.
Table 6: Results for HybridSORT as L1.
Tracker L1 HybridSORT
Re-ID OSNet CLIP-ReID
Tracker L2 k
IDF1
HOTA
MOTA
MOTP
IDF1
HOTA
MOTA
MOTP
− − 34.6 36.0 50.9 81.3 34.1 36.0 51.2 81.3
ByteTrack 2 42.5 41.0 65.1 81.6 42.5 41.0 65.1 81.6
ByteTrack 3 42.2 40.6 65.1 81.6 43.1 41.2 65.0 81.6
ByteTrack 5 41.9 40.0 65.0 81.6 41.9 40.1 65.0 81.6
ByteTrack 10 34.0 33.6 63.0 81.7 34.6 33.8 62.9 81.7
OC-SORT 2 33.9 35.8 51.8 81.3 34.3 36.0 52.0 81.3
OC-SORT 3 34.2 35.6 51.9 81.3 34.3 35.7 52.1 81.3
OC-SORT 5 34.1 34.8 51.8 81.3 34.2 34.9 51.9 81.3
OC-SORT 10 28.4 29.5 50.6 81.4 27.9 29.3 50.6 81.4
Table 7: Results for Deep OC-SORT as L1.
Tracker L1 Deep OC-SORT
Re-ID OSNet CLIP-ReID
Tracker L2 k
IDF1
HOTA
MOTA
MOTP
IDF1
HOTA
MOTA
MOTP
− − 35.0 36.7 62.1 81.7 35.6 37.3 62.2 81.7
ByteTrack 2 43.5 41.4 65.5 81.9 43.6 41.4 65.5 81.9
ByteTrack 3 44.5 41.7 65.6 81.9 44.6 41.7 65.6 81.9
ByteTrack 5 42.6 40.3 65.4 81.9 42.9 40.5 65.5 81.9
ByteTrack 10 35.0 33.9 63.6 82.0 35.1 33.8 63.6 82.0
OC-SORT 2 41.0 39.7 62.7 81.7 41.3 39.9 62.7 81.7
OC-SORT 3 39.9 39.4 62.7 81.7 40.1 39.5 62.7 81.7
OC-SORT 5 38.3 37.4 62.4 81.8 38.5 37.6 62.4 81.8
OC-SORT 10 31.1 31.4 60.9 81.8 31.7 31.8 61.0 81.8
Deep OC-SORT achieved very close results with
both OSNet and CLIP-ReiD (please refer to Table 7).
It ties to ByteTrack in terms of HOTA(41.7%), but it
is better in terms of IDF1 (44.5%) and MOTA (65.6).
Deep OC-SORT is the base tracker that most benefits
from the WindowTracker approach. It reached a max-
imum gain of 9.5% in IDF1. In terms of L2, Deep
OC-SORT pairs show higher scores in comparison to
the base tracker, for both ByteTrack and OC-SORT.
8 CONCLUSION
This paper presented the WindowTracker, a pairing
strategy that aims to improve people tracking by cor-
recting ID association. WindowTracker was applied
to the UFPR-Planalto801 dataset, which was created
from public videos on invasions to the Pal
´
acio do
Planalto, in Brazil, occurred at January 8, 2023. The
presented results show that the use of this pairing
technique provides better results in comparison to us-
ing only individual trackers.
As future work, we intend to extend the dataset
and to provide annotations for it to be suitable to other
Computer Vision tasks, such as gait recognition and
action detection. We also aim to improve the pro-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
136

posed strategy by enabling the use of level 2 trackers
that support deep learning feature extraction models.
ACKNOWLEDGEMENTS
This work was supported in part by the Coor-
dination for the Improvement of Higher Educa-
tion Personnel (CAPES) (Programa de Cooperac¸
˜
ao
Acad
ˆ
emica em Seguranc¸a P
´
ublica e Ci
ˆ
encias
Forenses # 88881.516265/2020-01), and in part by
the National Council for Scientific and Technological
Development(CNPq) (# 308879/2020-1). We grate-
fully acknowledge the support of NVIDIA Corpora-
tion with the donation of the Quadro RTX 8000 GPU
used for this research.
REFERENCES
Aharon, N., Orfaig, R., and Bobrovsky, B.-Z. (2022). BoT-
SORT: Robust Associations Multi-Pedestrian Track-
ing. arXiv:2206.14651.
Bernardin, K. and Stiefelhagen, R. (2008). Evaluating
Multiple Object Tracking Performance: The CLEAR
MOT Metrics. J. Image Video Process., 2008.
Bewley, A., Ge, Z., Ott, L., Ramos, F., and Upcroft, B.
(2016). Simple online and realtime tracking. In 2016
IEEE Int. Conf. on Image Processing (ICIP), pages
3464–3468.
Brostr
¨
om, M. (2023). BoxMOT: A collection of SOTA real-
time, multi-object trackers for object detectors .
Cao, J., Pang, J., Weng, X., Khirodkar, R., and Kitani,
K. (2023). Observation-Centric SORT: Rethinking
SORT for Robust Multi-Object Tracking. In Proceed-
ings of the IEEE/CVF Conference on Computer Vision
and Pattern Recognition (CVPR), pages 9686–9696.
Dendorfer, P., Rezatofighi, H., Milan, A., Shi, J., Cremers,
D., Reid, I., Roth, S., Schindler, K., and Leal-Taix
´
e,
L. (2019). CVPR19 tracking and detection challenge:
How crowded can it get? arXiv:1906.04567 [cs].
Dendorfer, P., Rezatofighi, H., Milan, A., Shi, J., Cremers,
D., Reid, I., Roth, S., Schindler, K., and Leal-Taix
´
e,
L. (2020). MOT20: A benchmark for multi object
tracking in crowded scenes. arXiv:2003.09003[cs].
Du, Y., Wan, J., Zhao, Y., Zhang, B., Tong, Z., and Dong, J.
(2021). GIAOTracker: A comprehensive framework
for MCMOT with global information and optimizing
strategies in VisDrone 2021. In 2021 IEEE/CVF Int.
Conf. on Computer Vision Workshops (ICCVW), pages
2809–2819.
Du, Y., Zhao, Z., Song, Y., Zhao, Y., Su, F., Gong, T.,
and Meng, H. (2023). StrongSORT: Make DeepSORT
Great Again. IEEE Transactions on Multimedia.
Gabinete de Seguranc¸a Institucional (2023). Nota
`
a im-
prensa. Last accessed 25 September 2023.
Ge, Z., Liu, S., Wang, F., Li, Z., and Sun, J. (2021).
YOLOX: Exceeding YOLO Series in 2021.
Jocher, G., Chaurasia, A., and Qiu, J. (2023). YOLO by
Ultralytics.
Jonker, R. and Volgenant, A. (1987). A Shortest Augment-
ing Path Algorithm for Dense and Sparse Linear As-
signment Problems. Computing, 38(4):325–340.
Li, S., Sun, L., and Li, Q. (2023). CLIP-ReID: Exploiting
Vision-Language Model for Image Re-identification
without Concrete Text Labels. Proc. of the AAAI Conf.
on Artificial Intelligence, 37(1):1405–1413.
Luiten, J. and Hoffhues, A. (2020). TrackEval.
https://github.com/JonathonLuiten/TrackEval.
Luiten, J., Osep, A., Dendorfer, P., Torr, P., Geiger, A., Leal-
Taix
´
e, L., and Leibe, B. (2020). HOTA: A Higher
Order Metric for Evaluating Multi-Object Tracking.
Int. Journal of Computer Vision, pages 1–31.
Machaca, L., Sumari H., F. O., Huaman, J., Clua, E., and
Guerin, J. (2022). TrADe Re-ID – Live Person Re-
Identification using Tracking and Anomaly Detection.
In 2022 21st IEEE Int. Conf. on Machine Learning
and Applications (ICMLA), pages 449–454.
Maggiolino, G., Ahmad, A., Cao, J., and Kitani, K. (2023).
Deep OC-SORT: Multi-Pedestrian Tracking by Adap-
tive Re-Identification. arXiv:2302.11813.
Milan, A., Leal-Taix
´
e, L., Reid, I., Roth, S., and Schindler,
K. (2016). MOT16: A benchmark for multi-object
tracking. arXiv:1603.00831 [cs].
Redmon, J., Divvala, S., Girshick, R., and Farhadi, A.
(2016). You only look once: Unified, real-time object
detection. In Proceedings of the IEEE Conference on
Computer Vision and Pattern Recognition (CVPR).
Ristani, E., Solera, F., Zou, R., Cucchiara, R., and Tomasi,
C. (2016). Performance Measures and a Data Set for
Multi-target, Multi-camera Tracking. In Computer Vi-
sion – ECCV 2016 Workshops, pages 17–35, Cham.
Springer International Publishing.
Sun, P., Cao, J., Jiang, Y., Yuan, Z., Bai, S., Kitani, K.,
and Luo, P. (2022). DanceTrack: Multi-Object Track-
ing in Uniform Appearance and Diverse Motion. In
Proceedings of the IEEE/CVF Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
20993–21002.
Wojke, N., Bewley, A., and Paulus, D. (2017). Simple
online and realtime tracking with a deep association
metric. In 2017 IEEE Int. Conf. on Image Processing
(ICIP), pages 3645–3649.
Yang, M., Han, G., Yan, B., Zhang, W., Qi, J., Lu, H., and
Wang, D. (2023). Hybrid-SORT: Weak Cues Matter
for Online Multi-Object Tracking. arXiv:2308.00783.
Zhang, Y., Sun, P., Jiang, Y., Yu, D., Weng, F., Yuan, Z.,
Luo, P., Liu, W., and Wang, X. (2022). ByteTrack:
Multi-Object Tracking by Associating Every Detec-
tion Box. In Proceedings of the European Conference
on Computer Vision (ECCV).
Zhou, K., Yang, Y., Cavallaro, A., and Xiang, T.
(2019). Omni-Scale Feature Learning for Person Re-
Identification. In 2019 IEEE/CVF Int. Conf. on Com-
puter Vision (ICCV), pages 3701–3711, Los Alamitos,
CA, USA. IEEE Computer Society.
A Multilevel Strategy to Improve People Tracking in a Real-World Scenario
137
