
Exploring Foveation Techniques for Virtual Reality Environments
Razeen Hussain
a
, Manuela Chessa
b
and Fabio Solari
c
Department of Informatics, Bioengineering, Robotics and Systems Engineering, University of Genoa, Genoa, Italy
Keywords:
Foveation, Virtual Reality, Immersive Media, Image Quality, Gaze-Contingency, Visual Perception.
Abstract:
Virtual reality technology is constantly advancing leading to the creation of novel experiences for the user.
High-resolution displays often are accompanied by higher processing power needs. Foveated rendering is a
potential solution to circumvent this issue as it can significantly reduce the computational load by rendering
only the area where the user is looking with higher detail. In this work, we compare different foveated ren-
dering algorithms in terms of the quality of the final rendered image. The focus of this work is on evaluating
4K images. These algorithms are also compared based on computational models of human visual processing.
Our analysis revealed that the non-linear content-aware algorithm performs best.
1 INTRODUCTION
In the realm of virtual reality (VR), the pursuit of
unparalleled realism and immersive experiences has
driven continual advancements in technology. One
of the focal points of development over the years has
centered on enhancing display resolution. As VR ap-
plications seek to reproduce and surpass real-world
visual experiences, the drive for higher display pixel
densities proves pivotal in delivering lifelike visu-
als, sharper details, and a higher sense of presence
for users. Nevertheless, certain perceptual challenges
persist (Hussain et al., 2023), presenting avenues for
further exploration and refinement in the pursuit of an
even more compelling VR experience.
A pivotal challenge faced by VR developers lies in
optimizing computational resources without compro-
mising visual fidelity. Foveation techniques, rooted
in the human visual system’s ability to focus sharply
on specific regions while perceiving peripheral ar-
eas with lower acuity, have emerged as a promising
solution. These techniques selectively allocate ren-
dering resources, concentrating detail where the user
is looking and reducing the computational load in
the peripheral vision (Mohanto et al., 2022). When
combined with accurate eye-tracking functionality,
foveated rendering could accelerate the creation of
large-screen displays with more expansive fields of
view and higher pixel densities (Roth et al., 2017).
a
https://orcid.org/0000-0002-7579-5069
b
https://orcid.org/0000-0003-3098-5894
c
https://orcid.org/0000-0002-8111-0409
As VR applications become increasingly diverse,
from gaming and simulations to medical and educa-
tional contexts, understanding the nuances of differ-
ent foveation methods is crucial.
Foveation can be applied at various stages of the
rendering pipeline. They can be applied to optics,
screen space, or object space (Jabbireddy et al., 2022).
Optics-based foveation modifies the display’s opti-
cal system using eye tracking to adjust focus, prior-
itizing high-detail rendering in the user’s gaze area.
Screen-space foveation optimizes computational per-
formance by rendering central image details and grad-
ually reducing detail towards the periphery. Object-
space foveation preprocesses 3D model geometry,
employing multiple models with decreasing levels of
detail based on the user’s gaze, reducing rendered
polygons for enhanced computational efficiency.
The aim of this work is to evaluate recent foveated
rendering algorithms. In particular, we evaluate how
natural the output is since in the quest for immer-
sive experiences, achieving naturalness is paramount;
it denotes how seamlessly the foveated rendering
technique integrates high-resolution focus areas with
lower-resolution peripheral regions, mirroring the
way human vision naturally perceives visual stimuli.
In this work, we assess 7 foveation techniques
on 4K data, aligning with the growing prevalence of
high-resolution VR displays. We compare them in
terms of computation time and image quality assess-
ment (IQA), utilizing both referenced (PSNR, SSIM,
VIF, FovVDP) and reference-less (BRISQUE, NIQE,
and PIQE) metrics. By employing metrics inspired by
Hussain, R., Chessa, M. and Solari, F.
Exploring Foveation Techniques for Virtual Reality Environments.
DOI: 10.5220/0012458200003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 321-328
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
321

computational models of visual perception, our goal
is to determine the compatibility/suitability of VR-
based foveated techniques with the human visual sys-
tem since such techniques are used in VR with hu-
mans. This could also serve as a valuable tool for
the early testing and assessment of foveation algo-
rithms, minimizing the reliance on experimental ses-
sions with human participants until their final devel-
opment stage.
2 FOVEATED RENDERING
Foveated rendering is a technique used in VR and
other visual systems to optimize the allocation of
computational resources and bandwidth (Jin et al.,
2020). It leverages the concept of foveation, which
mimics the human visual system by concentrating
higher detail in the central visual field (foveal region)
and reducing detail in the peripheral vision. This
means allocating more pixels to represent the central
part of an image or video and fewer pixels for the sur-
rounding areas (Hussain et al., 2019). By prioritizing
the allocation of resources to the areas where users
are most likely to focus their attention, foveation aims
to reduce the overall amount of data that needs to be
transmitted or processed, thus improving bandwidth
efficiency. This approach is particularly relevant in
VR applications, where high computational demands
and limited bandwidth can impact the quality and re-
sponsiveness of the virtual experience.
Spatial resolution adaptation in foveated rendering
often involves log-polar mapping, a process where the
original image is transformed into both cortical and
retinal domains (Solari et al., 2012). This transfor-
mation results in an image with higher resolution at
the center, gradually decreasing as one moves towards
the periphery. Foveated rendering techniques, such as
the kernel-based approach (Meng et al., 2018), lever-
age this spatial variation. In this method, the high-
acuity foveal region is synchronized with head move-
ments, while the peripheral region aligns with the vir-
tual world, optimizing computational efficiency.
Some systems have introduced algorithms that
compute multiple resolution images, subsequently
constructing the final image through a combination of
the high and low resolution images for the foveal and
the peripheral areas respectively (Romero-Rond
´
on
et al., 2018). A challenge of such approaches is the
occurrence of artifacts in the transitional regions. A
blending function can be incorporated to minimize
these artifacts (Hussain et al., 2020).
A prevailing challenge in foveated rendering lies
in determining optimal parameters. Traditional meth-
ods rely on fixed parameters, but recent advance-
ments, like content-aware prediction model (Tursun
et al., 2019), introduce adaptability based on lumi-
nance and contrast. A study on foveal region size and
its impact on cybersickness revealed that users adapt
more swiftly to larger foveal regions (Lin et al., 2020).
However, geometric aliasing remains a persistent
issue, manifesting as temporal flickering. Solutions,
such as temporal foveation integrated into the rasteri-
zation pipeline (Franke et al., 2021) can dynamically
decide whether to re-project pixels from the previous
frame or redraw them, and is especially effective for
dynamic objects. Another approach involves post-
processing by adding depth-of-field (DoF) to miti-
gate artifacts (Weier et al., 2018). While this method
showed promising visual results, challenges related to
achieving necessary frame rates underscore the im-
portance of combining DoF blur and foveated imag-
ing for optimal outcomes.
Recently, the image quality of foveated com-
pressed videos has been evaluated (Jin et al., 2021).
The authors use various objective metrics as well as
subjective measures to assess the quality of the im-
ages with various compression levels. They focus on
live images which are more appropriate for 360°VR.
On the other hand, our work focuses on animated data
which is more common in traditional VR setups.
3 EXPERIMENTAL STUDY
The aim of this study is to provide valuable insights
into the degree of naturalness achieved by different
foveation techniques. Since the support resolution of
consumer VR devices is gradually increasing, a goal
of this work is to evaluate the performance of these
techniques on 4K data.
3.1 Foveation Techniques
A spectrum of foveation methods was considered
based on the type of algorithm and availability of
code. In the end, 7 techniques for foveation or
foveated rendering were shortlisted. These range
from traditional gaze-based foveation to advanced
machine learning-driven approaches. The techniques
are briefly described below:
3.1.1 MRF
The multi-region foveation (MRF) process begins
with scene analysis to identify the primary area of
interest. A Gaussian blur is applied to the periph-
eral regions of the visual field, gradually attenuating
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
322

spatial details. Concurrently, the central region un-
dergoes higher resolution rendering, preserving crit-
ical details. The degree of foveation is dynamically
adjusted based on user focus, ensuring adaptability
to changing visual contexts. The implementation in-
volves a two-step rendering process. First, the low-
resolution peripheral image is generated, and then the
high-resolution central image is overlaid. Although
the image can be divided into circular or rectangular
sections (Bastani et al., 2017), we use circular ego-
centric regions as they better correlate to the optics of
the majority of consumer VR devices.
3.1.2 SVIS
Space variant imaging system (SVIS) is a toolbox
available for MATLAB (Geisler and Perry, 2008). It
allows the simulation of foveated images in real time.
The foveation encoder and the foveation decoder are
the two components that make up this foveated imag-
ing algorithm. The original image is put through a
number of low-pass filtering and downsampling pro-
cesses in the foveation encoder to produce a pyramid
of images with progressively lower resolutions. The
low-pass pictures from the pyramid are up-sampled,
interpolated, and blended by the foveation decoder to
create a displayable image that is smoothly foveated.
3.1.3 LPM
The technique proposed in (Solari et al., 2012) has the
aim of mimicking the non-linear space variant sam-
pling of the human retina, i.e. the log-polar mapping
(LPM). This technique is well suited to computing vi-
sual features directly in the cortical domain since it
allows for defining a proper spatial sampling pattern.
Moreover, it has a fast implementation since it uses bi-
linear interpolation instead of a Gaussian blur. This
implementation also allows obtaining a spatial sam-
pling closer to the human one that is not completely
described by a Gaussian blur. Indeed, this technique
is used also to mimic human visual processing, such
as the ones of disparity (Maiello et al., 2020) and optic
flow (Chessa et al., 2016). It is also possible to exploit
the inverse mapping in order to use the technique for
foveated rendering. Specifically, we use LPM param-
eters similar to the ones in (Maiello et al., 2020) for
performing the comparison proposed in this work.
3.1.4 Contrast Foveation
This technique introduces a perceptually-based
foveated real-time renderer designed to approximate
a contrast-preserving filtered image (Patney et al.,
2016). The motivation behind this approach is to ad-
dress the sense of tunnel vision introduced by reduced
contrast in the filtered image. To achieve contrast
preservation, the renderer pre-filters certain shading
attributes while undersampling others. To mitigate
temporal aliasing resulting from under-sampling, a
multi-scale version of temporal anti-aliasing is ap-
plied. Both pre- and post-filtering reduce contrast,
which is normalized using a post-process foveated
contrast-enhancing filter.
3.1.5 Noised Foveation
This technique proposed by (Tariq et al., 2022) en-
hances foveated images by considering the spatial
frequencies. The authors highlight a limitation in
contemporary foveated rendering techniques, which
struggle to distinguish between spatial frequencies
that must be reproduced accurately and those that can
be omitted. The process begins with a foveated image
as the input and estimates parameters such as orienta-
tion, frequency, and amplitude for Gabor noise. Sub-
sequently, Gabor kernels are generated based on these
estimated parameters and convolved with random im-
pulses, effectively synthesizing procedural noise. In
the next step, the synthesized procedural noise is in-
troduced to the contrast-enhanced foveated image.
This addition of noise contributes to the overall vi-
sual richness and complexity of the image, enhancing
the perceived details and textures in the foveal region.
The integration of Gabor noise in this manner is a de-
liberate strategy to augment the visual quality and re-
alism of the foveated image.
3.1.6 Aware Foveation
This technique proposes a computational model
for luminance contrast to determine the maximum
amount of spatial resolution loss that may be added to
an image without causing observable artifacts (Tursun
et al., 2019). The model incorporates elements such
as a contrast perception transducer model and periph-
eral contrast sensitivity, which are based on aspects
of the human visual system. The model predictions
are fine-tuned by utilizing acquired experimental data.
The predictor model’s ability to predict parameters
accurately for high-resolution rendering even when it
is only given a low-resolution image of the current
frame is one of its key primary features. This feature
is essential for determining the required quality before
producing the entire high-resolution image.
3.1.7 Foveated Depth-of-Field
The foveated depth-of-field is a technique originally
designed to mitigate the onset of cybersickness in VR
systems (Hussain et al., 2021). The algorithm is im-
plemented in the screen space as a post-processing
Exploring Foveation Techniques for Virtual Reality Environments
323

effect. It takes into account how the human visual
system works in real-world viewing and attempts to
minimize the discrepancies between it and virtual ob-
ject viewing. It radially divides the image into three
sections, representing the foveal, near-peripheral, and
mid-peripheral regions. The output image is further
refined by computing the depth-of-field. Thus, mim-
icking real-world viewing where objects placed at the
accommodative distance regardless of their position
in the field-of-view are perceived with high fidelity.
It incorporates a blending function to remove artifacts
in the transitory regions where there is a significant
difference in blurring between adjacent pixels.
3.2 Dataset
We use the MPI Sintel dataset (Butler et al., 2012)
which contains 23 scenes capturing diverse indoor
and outdoor scenes using Blender. Overall, the
dataset contains 1064 8-bit RGB images where each
image has a resolution of 1024x436 and contains cor-
responding depth maps. The choice of the dataset was
motivated by the fact that some of the foveation tech-
niques rely on depth maps to refine the output. Since,
the data is not of 4K resolution, a pre-processing step
was performed to scale the data (see Section 3.4).
3.3 Evaluation Metrics
The objective of this study is to analyze the natural-
ness of images produced by foveation. For this pur-
pose, we use both referenced and reference-less IQA
metrics. Metrics that take into account the human vi-
sual system were also included. Overall, the follow-
ing metrics were selected for comparison:
• Execution Time. The execution time and frame
rate are critical factors in VR applications due to
their direct impact on user experience and immer-
sion. In VR environments, users interact with
computer-generated content that must be rendered
and updated in real-time to create a seamless and
immersive experience. Therefore, a lower pro-
cessing time is desired.
• PSNR. Peak Signal-to-Noise Ratio (PSNR) quan-
tifies the difference between the two images in
terms of both signal fidelity and noise introduced
during compression. Higher PSNR values indi-
cate better quality.
• SSIM. Structural Similarity Index (SSIM) (Wang
et al., 2004) is a metric used to quantify the simi-
larity between two images by taking into account
luminance, contrast, and structure. The SSIM in-
dex ranges from -1 to 1, where higher SSIM val-
ues generally correspond to better perceptual im-
age quality.
• VIF. Visual Information Fidelity (VIF) (Sheikh
and Bovik, 2006) is based on the concept that the
human visual system is sensitive to various fre-
quency components in an image. It quantifies how
well an image preserves important visual infor-
mation when compared to a reference image. It
considers both luminance adaptation and contrast
sensitivity functions of the human visual system.
The metric ranges from 0 to 1, where 1 indicates
perfect similarity.
• FovVDP. FovVDP (Mantiuk et al., 2021) is a
full-reference visual quality metric that predicts
the perceptual difference between pairs of images
and videos. It is aimed at comparing a ground
truth reference video against a distorted version,
such as a compressed or lower framerate video.
FovVDP works for videos in addition to images,
accounts for peripheral acuity, and works with
SDR and HDR content. It models the response
of the human visual system to changes over time
as well as across the visual field, so it can predict
temporal artifacts like flicker and judder, as well
as spatio-temporal artifacts as perceived at differ-
ent degrees of peripheral vision. Such a metric
is important for head-mounted displays as it ac-
counts for both the dynamic content, as well as
the large field of view.
• BRISQUE. Blind/Referenceless Image Spatial
Quality Evaluator (BRISQUE) (Mittal et al.,
2011) is a no-reference image quality metric that
operates on a machine learning algorithm, utiliz-
ing natural scene statistics to gauge image quality.
The BRISQUE score is determined by comparing
the image to a default model generated from im-
ages of natural scenes exhibiting comparable dis-
tortions. A lower score is indicative of higher per-
ceptual quality.
• NIQE. Natural Image Quality Evaluator (NIQE)
(Mittal et al., 2012) is a no-reference image qual-
ity metric that gauges the naturalness of an image
by measuring it against a default model derived
from images of natural scenes. A lower NIQE
score signifies superior perceptual quality.
• PIQE. Perception-based Image Quality Evalua-
tor (PIQE) (Venkatanath et al., 2015) is an image
quality evaluator that calculates the no-reference
image quality score using a perception-based ap-
proach by measuring the local variance of percep-
tibly distorted blocks. The PIQE score is a non-
negative scalar in the range [0, 100]. A higher
score value indicates lower perceptual quality.
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
324
3.4 Experimental Procedure
The experimentation was performed on a workstation
comprised of an Intel Core i7-9700K processor and
an NVIDIA GeForce 1080 graphics card. The al-
gorithms were run using MATLAB implementations.
We chose MATLAB as our primary platform for im-
plementation because we intend to compare foveated
rendering algorithms based on computational models
of the human visual system, allowing for a compre-
hensive analysis within a controlled environment.
Since the dataset is of a lower resolution than 4K,
a pre-processing step was performed to scale the im-
ages to the desired resolution (3840x2180). In order
to maintain the aspect ratio and subsequently not in-
troduce any distortion, the pre-processing was per-
formed in two stages. First, the image was resized
using the same aspect ratio as that of the dataset and
then, a section of the enlarged image was cropped cor-
responding to the 4K resolution from the center of the
image. A similar operation was also performed on the
depth maps.
The center of the image was chosen as the gaze lo-
cation. This was motivated by the fact that many VR
user studies have found that the users’ fixation point
tends to be on the center of the display the majority of
the time during an immersive experience (Clay et al.,
2019) while the users prefer to move their head and
not just the gaze when they want to fixate on other
objects.
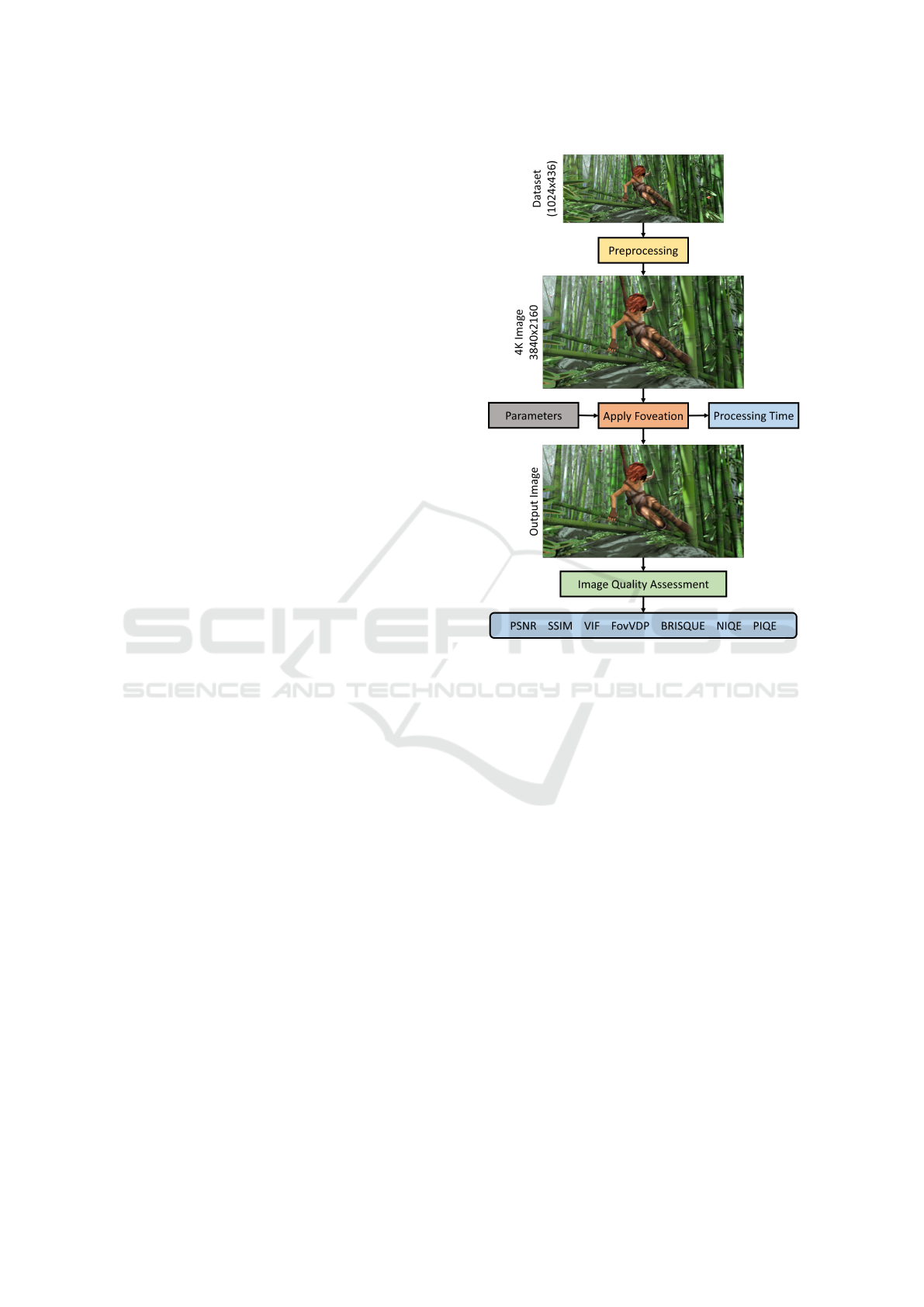
The overall process is shown in Figure 1. The
original image is first transformed to the desired res-
olution. Parameters such as gaze location, Gaussian
pyramid levels, depth maps, etc. are passed to the
foveation algorithm as per requirement. The output
image shown in the figure is of Noised Foveation.
Evaluation metrics are computed accordingly.
4 RESULTS
The experimental analysis is shown in Table 1, tak-
ing into account metrics such as computation time and
referenced and reference-less IQA. For the reference-
less image quality metrics, the corresponding metric
score for the original image is also shown to provide
a comparison.
Example output images of the foveation tech-
niques are shown in Figure 2. However, the differ-
ences may not be apparent. Therefore, maps/masks
corresponding to pixels with noticeable differences
from the reference image and potential areas of no-
ticeable artifacts are also shown. These include the
SSIM maps which highlight local values of SSIM,
Figure 1: The overall process flow.
FovVDP difference maps which contain color-coded
visualization of the difference map in the form of
heatmaps and PIQE artifacts which highlight the
number of artifacts in the image noticeable to the hu-
man eye.
In the referenced image quality metrics, the Aware
Foveation technique emerged as the top performer.
This can be attributed primarily to the model’s capa-
bility to predict the sigma level individually for each
pixel, determining the degree of reduction in spatial
resolution. This precision in predicting and adjusting
the spatial resolution at the pixel level contributes to
achieving superior image quality. The model’s perfor-
mance is notably comparable to the non-linear bio-
inspired technique of LPM, further emphasizing its
efficacy in capturing and optimizing the intricacies of
spatial resolution across the image.
Among the VR-based foveated rendering tech-
niques, Foveated DoF emerged as the second best per-
forming. This was largely due to the artifact reduction
step incorporated into the algorithm and to the incor-
poration of accommodative distance, a property of the
lens in the human eyes. Contrast Foveation performed
better than the MRF algorithm. It should be noted that
the Contrast Foveation used the output of the MRF as
Exploring Foveation Techniques for Virtual Reality Environments
325
Table 1: Comparison among foveation algorithms. The mean values over the dataset are reported along with the standard
deviation in rounded brackets. The best and second best performing algorithm for each metric is highlighted in bold and
bold-italics respectively. Metrics for the original data are also reported in the case of reference-less image quality metrics.
Original MRF SVIS LPM
Contrast
Enhanced
Noised
Foveation
Aware
Foveation
Foveated
DoF
Time (s) –
6.584
(0.090)
1.237
(0.014)
1.568
(0.045)
11.726
(0.204)
93.703
(0.816)
72.394
(1.321)
0.453
(0.029)
PSNR –
35.631
(4.243)
41.953
(3.869)
48.285
(3.743)
37.168
(4.276)
28.957
(2.751)
53.457
(3.117)
45.730
(5.180)
SSIM –
0.984
(0.012)
0.995
(0.004)
0.998
(0.002)
0.985
(0.011)
0.880
(0.047)
0.999
(0.001)
0.998
(0.002)
VIF –
0.494
(0.063)
0.697
(0.045)
0.848
(0.032)
0.537
(0.065)
0.423
(0.059)
0.930
(0.022)
0.956
(0.019)
FovVDP –
9.569
(0.186)
9.739
(0.117)
9.943
(0.044)
9.724
(0.122)
9.456
(0.117)
9.983
(0.014)
9.329
(0.345)
BRISQUE
54.823
(5.460)
55.469
(9.135)
52.941
(6.328)
56.991
(6.294)
55.753
(8.446)
13.993
(6.466)
55.548
(5.871)
56.039
(4.677)
NIQE
5.876
(0.470)
6.031
(0.548)
6.163
(0.605)
5.698
(0.569)
6.100
(0.515)
2.802
(0.240)
5.654
(0.454)
5.531
(0.550)
PIQE
77.194
(8.214)
80.942
(9.565)
81.370
(8.898)
77.520
(8.069)
81.580
(9.520)
28.486
(5.325)
78.265
(7.889)
79.035
(7.130)
an input and the difference between the two is rela-
tively small.
Although Noised Foveation was the worst per-
forming in the referenced image assessment, it was
the best performing in the reference-less metrics. This
may be due to the fact that the considered reference-
less metrics take into account the difference in tex-
ture across the image. The artifacts introduced by the
foveation technique, largely due to the incorporation
of noise into the algorithm, may have influenced the
metric scores. However, it should be noted that the
number of noticeable artifacts is quite high (see PIQE
artifacts in Figure 2). These are located mostly in the
peripheral regions and may not be an issue since some
VR user studies have found that the human visual sys-
tem is more sensitive to artifacts present inside 20°of
eccentricity (Hoffman et al., 2018).
Nevertheless, the discrepancy in the values of
reference-less metrics, notably lower than those of the
original images, raises concerns about the potential
influence of noise and suggests a need for caution in
interpreting and reporting these metrics. It is possible
that these metrics are susceptible to misinterpretation
due to noise. This issue will be thoroughly addressed
in future work through experimental sessions involv-
ing participants to ensure a more accurate and reliable
evaluation.
In terms of computation time, the Foveated DoF
algorithm performed best, followed by SVIS and
LPM. Although we report the computation time
each foveated imaging algorithm took, it should be
noted that some of the algorithms under evaluation
have been designed for implementation on OpenGL-
enabled GPUs, and as a consequence, their perfor-
mance experiences a notable slowdown when exe-
cuted using MATLAB on a CPU. It is imperative to
recognize that these algorithms are inherently opti-
mized for GPU architecture, and their efficiency is ex-
pected to significantly improve when deployed in ac-
tual VR applications, where computations take place
on a dedicated GPU using shaders, ensuring a notably
faster execution.
Overall, the Aware Foveation model exhibited the
highest performance, closely followed by Foveated
DoF and LPM. We opted to assign higher weightage
to the FovVDP metric since it accounts for the phys-
ical display specification (size, viewing distance),
foveated viewing, and temporal aspects of vision.
5 CONCLUSIONS
The primary contribution of this study lies in con-
ducting a systematic evaluation of various VR-based
foveated rendering algorithms and their comparison
through computational models of human visual per-
ception. A comprehensive assessment was performed
on 7 algorithms, each applicable to the integration of
foveation within VR applications. The evaluation en-
compassed key criteria such as accuracy, the presence
of artifacts, and computation time.
The findings from this research underscore the
critical importance of considering the targeted hard-
ware environment and the specific metrics employed
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
326
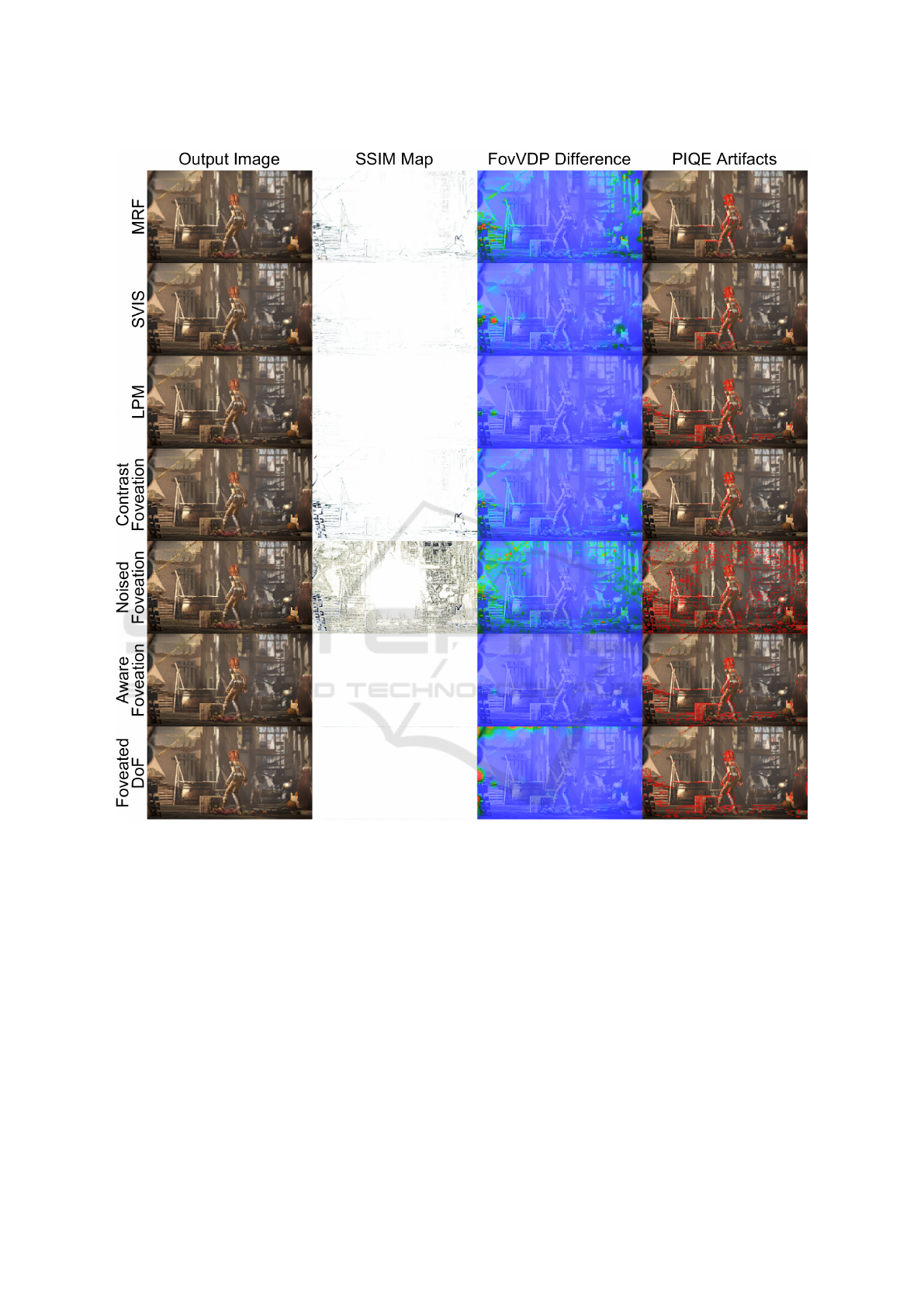
Figure 2: The output images of the tested foveation techniques. Maps highlighting differences or artifacts are also shown.
when assessing and selecting foveated imaging algo-
rithms for practical implementation in the immersive
domain of virtual reality. This recognition is vital
for tailoring the choice of foveation techniques to the
unique demands and constraints of diverse hardware
configurations and application scenarios. As a future
work, we intend to extend this investigation by con-
ducting a subjective study. This user study will aim to
compare the outputs of the considered foveated ren-
dering techniques from a perceptual standpoint, pro-
viding a more holistic understanding of their perfor-
mance and impact on the user experience.
REFERENCES
Bastani, B., Turner, E., Vieri, C., Jiang, H., Funt, B., and
Balram, N. (2017). Foveated pipeline for ar/vr head-
mounted displays. Information Display, 33(6):14–35.
Butler, D. J., Wulff, J., Stanley, G. B., and Black, M. J.
(2012). A naturalistic open source movie for optical
flow evaluation. In A. Fitzgibbon et al. (Eds.), editor,
European Conference on Computer Vision (ECCV),
Part IV, LNCS 7577, pages 611–625. Springer-Verlag.
Chessa, M., Maiello, G., Bex, P. J., and Solari, F. (2016). A
space-variant model for motion interpretation across
the visual field. Journal of Vision, 16(2):1–24.
Exploring Foveation Techniques for Virtual Reality Environments
327

Clay, V., K
¨
onig, P., and Koenig, S. (2019). Eye tracking
in virtual reality. Journal of Eye Movement Research,
12(1).
Franke, L., Fink, L., Martschinke, J., Selgrad, K., and Stam-
minger, M. (2021). Time-warped foveated rendering
for virtual reality headsets. Computer Graphics Fo-
rum, 40(1):110–123.
Geisler, W. S. and Perry, J. S. (2008). Space Variant
Imaging System (SVIS). https://svi.cps.utexas.edu/
svistoolbox-1.0.5.zip.
Hoffman, D., Meraz, Z., and Turner, E. (2018). Limits of
peripheral acuity and implications for vr system de-
sign. Journal of the Society for Information Display,
26(8):483–495.
Hussain, R., Chessa, M., and Solari, F. (2020). Modelling
foveated depth-of-field blur for improving depth per-
ception in virtual reality. In 4th IEEE International
Conference on Image Processing, Applications and
Systems, pages 71–76.
Hussain, R., Chessa, M., and Solari, F. (2021). Mitigat-
ing cybersickness in virtual reality systems through
foveated depth-of-field blur. Sensors, 21(12).
Hussain, R., Chessa, M., and Solari, F. (2023). Improv-
ing depth perception in immersive media devices by
addressing vergence-accommodation conflict. IEEE
Transactions on Visualization and Computer Graph-
ics, pages 1–13.
Hussain, R., Solari, F., and Chessa, M. (2019). Simulated
foveated depth-of-field blur for virtual reality systems.
In 16th ACM SIGGRAPH European Conference on Vi-
sual Media Production, London, United Kingdom.
Jabbireddy, S., Sun, X., Meng, X., and Varshney, A. (2022).
Foveated rendering: Motivation, taxonomy, and re-
search directions. arXiv preprint arXiv:2205.04529.
Jin, Y., Chen, M., Bell, T. G., Wan, Z., and Bovik, A.
(2020). Study of 2D foveated video quality in virtual
reality. In Tescher, A. G. and Ebrahimi, T., editors,
Applications of Digital Image Processing XLIII, vol-
ume 11510, page 1151007. International Society for
Optics and Photonics, SPIE.
Jin, Y., Chen, M., Goodall, T., Patney, A., and Bovik,
A. C. (2021). Subjective and objective quality assess-
ment of 2d and 3d foveated video compression in vir-
tual reality. IEEE Transactions on Image Processing,
30:5905–5919.
Lin, Y.-X., Venkatakrishnan, R., Venkatakrishnan, R.,
Ebrahimi, E., Lin, W.-C., and Babu, S. V. (2020). How
the presence and size of static peripheral blur affects
cybersickness in virtual reality. ACM Transactions on
Applied Perception, 17(4):1–18.
Maiello, G., Chessa, M., Bex, P. J., and Solari, F. (2020).
Near-optimal combination of disparity across a log-
polar scaled visual field. PLOS Computational Biol-
ogy, 16(4):1–28.
Mantiuk, R. K., Denes, G., Chapiro, A., Kaplanyan, A.,
Rufo, G., Bachy, R., Lian, T., and Patney, A. (2021).
Fovvideovdp: A visible difference predictor for wide
field-of-view video. ACM Transactions on Graphics,
40(4).
Meng, X., Du, R., Zwicker, M., and Varshney, A. (2018).
Kernel foveated rendering. Proceedings of ACM on
Computer Graphics and Interactive Techniques, 1(1).
Mittal, A., Moorthy, A. K., and Bovik, A. C. (2011).
Blind/referenceless image spatial quality evaluator. In
45th ASILOMAR Conference on Signals, Systems and
Computers, pages 723–727. IEEE.
Mittal, A., Soundararajan, R., and Bovik, A. C. (2012).
Making a “completely blind” image quality analyzer.
IEEE Signal Processing Letters, 20(3):209–212.
Mohanto, B., Islam, A. T., Gobbetti, E., and Staadt, O.
(2022). An integrative view of foveated rendering.
Computers & Graphics, 102:474–501.
Patney, A., Salvi, M., Kim, J., Kaplanyan, A., Wyman, C.,
Benty, N., Luebke, D., and Lefohn, A. (2016). To-
wards foveated rendering for gaze-tracked virtual re-
ality. ACM Transactions on Graphics, 35(6).
Romero-Rond
´
on, M. F., Sassatelli, L., Precioso, F., and
Aparicio-Pardo, R. (2018). Foveated streaming of vir-
tual reality videos. In 9th ACM Multimedia Systems
Conference, MMSys ’18, page 494–497, New York,
NY, USA. Association for Computing Machinery.
Roth, T., Weier, M., Hinkenjann, A., Li, Y., and Slusallek,
P. (2017). A quality-centered analysis of eye tracking
data in foveated rendering. Journal of Eye Movement
Research, 10(5).
Sheikh, H. and Bovik, A. (2006). Image information and vi-
sual quality. IEEE Transactions on Image Processing,
15(2):430–444.
Solari, F., Chessa, M., and Sabatini, S. P. (2012). Design
strategies for direct multi-scale and multi-orientation
feature extraction in the log-polar domain. Pattern
Recognition Letters, 33(1):41–51.
Tariq, T., Tursun, C., and Didyk, P. (2022). Noise-based en-
hancement for foveated rendering. ACM Transactions
on Graphics, 41(4).
Tursun, O. T., Arabadzhiyska-Koleva, E., Wernikowski,
M., Mantiuk, R., Seidel, H.-P., Myszkowski, K., and
Didyk, P. (2019). Luminance-contrast-aware foveated
rendering. ACM Transactions on Graphics, 38(4).
Venkatanath, N., Praneeth, D., Maruthi Chandrasekhar, B.,
Channappayya, S. S., and Medasani, S. S. (2015).
Blind image quality evaluation using perception based
features. In 21st National Conference on Communica-
tions, pages 1–6.
Wang, Z., Bovik, A., Sheikh, H., and Simoncelli, E. (2004).
Image quality assessment: from error visibility to
structural similarity. IEEE Transactions on Image
Processing, 13(4):600–612.
Weier, M., Roth, T., Hinkenjann, A., and Slusallek, P.
(2018). Foveated depth-of-field filtering in head-
mounted displays. ACM Transactions on Applied Per-
ception, 15(4):1–14.
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
328
