
Effects of Model Drift on Ship Detection Models
Namita Agarwal
1 a
, Anh Vu Vo
1 b
, Michela Bertolotto
1 c
, Alan Barnett
2
, Ahmed Khalid
2
and
Merry Globin
2
1
School of Computer Science, University College Dublin, Dublin, Ireland
2
Dell Technologies, Cork, Ireland
Keywords:
Object Detection, Remote Sensing Images, LEVIR-Ship Dataset, YOLO Models, Model Drift.
Abstract:
The rapid and accurate detection of ships within the wide sea area is essential for maritime applications.
Many machine learning (ML) based object detection models have been investigated to detect ships in remote
sensing imagery in previous research. Despite the availability of large-scale training datasets, the performance
of object detection models can decrease significantly when the statistical properties of input images vary
according to, for example, weather conditions. This is known as model drift. The occurrence of ML model
drift degrades the object detection accuracy and this reduction in accuracy can produce skewed outputs such
as, incorrectly classified images or inaccurate semantic tagging, thus making the detection task vulnerable
to malicious attacks. The majority of existing approaches that deal with model drift relate to time series.
While there is some work on model drift for imagery data and in the context of object detection, the problem
has not been extensively investigated for object detection tasks in remote sensing images, especially with
large-scale image datasets. In this paper, the effects of model drift on the detection of ships from satellite
imagery data are investigated. Firstly, a YOLOv5 ship detection model is trained and validated using a publicly
available dataset. Subsequently, the performance of the model is validated against images subjected to artificial
blurriness, which is used in this research as a form of synthetic concept drift. The reduction of the model’s
performance according to increasing levels of blurriness demonstrates the effect of model drift. Specifically,
the average precision of the model dropped by more than 74% when the images were blurred at the maximum
level with a 11×11 Gaussian kernel size. More importantly, as the level of blurriness increased, the mean
confidence score of the detections decreased up to 20.8% and the number of detections also reduced. Since
the confidence scores and the number of detections are independent of ground truth data, such information has
the potential to be utilised to detect model drift in future research.
1 INTRODUCTION
With the expansion in maritime transportation appli-
cations, automatic ship detection has been a promis-
ing research topic (Zhao et al., 2019). Automatic
ship detection in remote sensing (RS) images refers
to finding ships and locating them in the images
automatically (Hashmani et al., 2019). Nowadays,
various convolutional neural networks (CNNs)-based
deep learning (DL) techniques have been used in RS
ship detection for their ability to rapidly and accu-
rately detect ships (Chen et al., 2022). ML challenges
such as the Airbus Ship Detection Challenge
1
demon-
a
https://orcid.org/0009-0005-5168-7951
b
https://orcid.org/0000-0002-6471-4905
c
https://orcid.org/0000-0003-0122-7656
1
https://www.kaggle.com/c/airbus-ship-detection
strated that despite the significant success achieved,
detection of ships from medium resolution images is
a non-trivial problem. The accuracy and robustness of
most ship detection models can be challenged when
being faced with images captured in different scenar-
ios, i.e., rough sea, calm sea, thick cloud, thin cloud
etc. (Bayram et al., 2022). As supervised ML models
rely on a data snapshot available at the training time,
the models can become ineffective when the statisti-
cal properties of the data vary according to circum-
stances, for example, abnormal weather conditions,
oil spills in the area, under sea gas pipeline explosion,
etc. (Mehmood et al., 2023). Such a deterioration in
ML model performance is known as model drift, and
its prompt identification is crucial for detection and
tracking of ships engaging in potentially illegal activ-
ities (Zhang et al., 2022).
750
Agarwal, N., Vo, A., Bertolotto, M., Barnett, A., Khalid, A. and Globin, M.
Effects of Model Drift on Ship Detection Models.
DOI: 10.5220/0012443600003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 2: VISAPP, pages
750-754
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

In this paper, we investigate the effects of model
drift on ship detection models trained using the
LEVIR-ship dataset by (Chen et al., 2022). The
dataset comprises a total of 3896 medium resolution
(MR) satellite images captured in real world condi-
tions. Particularly, we introduce artificial blurriness,
as a form of controlled change, into the imagery data
and observe the changes in the accuracy and confi-
dence level of the model trained with the relatively
large scale dataset. Furthermore, we measure the ef-
fect on model performance degradation in terms of
the total number of detection calculated.
2 STATE OF THE ART
In recent years, various deep learning-based object
detection models, especially convolutional neural net-
works (CNNs) have been proposed to detect ships
in satellite images (Chen et al., 2022; Xu et al.,
2022; Chen et al., 2021; Wu et al., 2021; Chen,
2018). Object detection models based on CNN are
generally divided into two categories: one-stage net-
works [e.g., you only look once (YOLO), single-
shot detector (SSD)] (Chen et al., 2021) and two-
stage networks [e.g., R-CNN, Fast R-CNN] (Wu
et al., 2021). For example, (Xu et al., 2022) pro-
posed an one-stage based low-resolution marine ob-
ject (LMO) detection YOLO model (LMO-YOLO)
for ship detection in low-resolution images. In an-
other work, (Wu et al., 2021) proposed a two-stage
based instance segmentation assisted ship detection
network (ISASDNet) for ship detection in synthetic
aperture radar (SAR) images. A good number of
studies use different YOLO architecture-based mod-
els such as ImYOLOv3 (Chen et al., 2021) (i.e., Im-
proved YOLOv3), DRENet (Chen et al., 2022) (i.e.,
YOLOv5 with degraded reconstruction enhancement
feature), LMO (Xu et al., 2022) (i.e., YOLOv4 with a
multi-scale dilated convolution module). Other stud-
ies use different versions of YOLO models, such
as YOLOv3, YOLOv4, YOLOv5 directly, in detect-
ing ships for different satellite images ranging from
low-resolution RS images to high-resolution RS im-
ages, due to their fast and accurate detection capabil-
ities (Huang et al., 2023; Wu et al., 2021).
Furthermore, in the last few decades, various
researchers have created large-scale remote sensing
datasets (HRSC 2016 (Liu et al., 2016), NWPU-
VHR-10 (Zhang et al., 2019), HRRSD (Zhang et al.,
2019), DOTA (Ding et al., 2022), DIOR (Li et al.,
2020), AI-TOD (Wang et al., 2021)), and made them
publicly available to promote object detection tasks
for maritime applications. These datasets are either
collected from Google Earth or the focus has not
been on ship detection with a small number of im-
ages containing ships. With respect to model drift,
multiple approaches have been introduced over the
recent years to analyse the nature of changes in the
data, automatically detect model drift and ultimately
make the ML model more resilient during its deploy-
ment (Gama et al., 2014; Fr
´
ıas-Blanco et al., 2015;
Raab et al., 2020; Webb et al., 2018; Mehmood et al.,
2023).
3 EXPERIMENT DESIGN
To observe model drift effects, a number of exper-
iments were conducted by training a YOLOv5 ship
detection model using original, non-degraded images
from the LEVIR-ship dataset (Chen et al., 2022).
Subsequently, the model was validated on images
subjected to artificial Gaussian blurriness at different
levels (i.e., degraded images). The experiment was
conducted for five Gaussian blurriness levels deter-
mined by square Gaussian kernel sizes of (0, 0), (5, 5),
(7, 7), (9, 9), (11, 11). Here, (0, 0) indicates no blur-
ring effect, (5, 5) indicates a slight blurring effect, (7,
7) indicates a moderate blurring effect, (9, 9) indicates
a substantial blurring effect, and (11, 11) indicates a
more pronounced blurring effect. Every model in this
research was trained for 300 epochs. Longer training
appeared to reduce only training loss and not valida-
tion loss, which could lead to overfitting. All exper-
iments were performed using a NVIDIA A16 GPU
available on DELL high computing virtual machine.
4 RESULTS AND DISCUSSION
Table 1 shows the average precision (AP50) of the
ship detection model at epoch 300
th
at different blur-
riness levels. The mean average precision (mAP50) is
a popular metric representing object detection model
performance. Note that mAP is calculated by averag-
ing AP over different classes. As we have only one
class (i.e., ship), the term AP is more appropriate for
this work. The metric corresponds to the area under
the precision-recall curve calculated at an Intersection
over Union (IoU) of 50%, thereby capturing both the
precision and recall of the model in question. The re-
sults showed in Table 1 demonstrate that the ship de-
tection model which was trained using clear images
performed less well on blurred images. As the level
of blurriness increased, the AP50 score of the model
reduced accordingly. The reduction in AP50 was as
high as as 74.6% when the level of blurriness reached
Effects of Model Drift on Ship Detection Models
751

Table 1: Ship detection model performance at different levels of blurriness; the model was trained using clear images.
AP50
Without blur Blur (5, 5) Blur (7, 7) Blur (9, 9) Blur (11, 11)
0.777 0.561 0.417 0.304 0.197
(a) (b) (c) (d)
Figure 1: Samples of the detected results from test dataset.
Table 2: YOLOv5 model confidence score values with 0.25
threshold, with testing on both non-degraded and degraded
test images at 300
th
epoch.
Confidence scores
Test dataset Mean Median Variance
Without blur 0.606 0.659 0.023
blur (5,5) 0.606 0.662 0.023
blur (7,7) 0.579 0.620 0.022
blur (9,9) 0.535 0.561 0.020
blur (11,11) 0.480 0.480 0.017
to the highest level [i.e., kernel size of (11×11)]. That
significant reduction in the AP50 scores demonstrates
that the artificial blurriness introduced in the imagery
negatively impacted the model performance. In other
words, it demonstrated the model drift phenomenon.
Figure 1 illustrates some detected results from the
test dataset, where each detected ship is enclosed
within the red bounding box with its correspond-
ing confidence score. This figure depicts that the
YOLOv5 model can provide good detection perfor-
mance under different weather conditions despite be-
ing very small size of ships in MR images. The
confidence score is measured as the product of the
probability of a ship being present in the predicted
bounding box and the IoU between the predicted and
ground truth bounding boxes. The confidence score
ranges from 0 to 1, with 1 indicating the highest de-
gree of confidence in the detection. In this paper, con-
fidence scores are calculated based on a 25% confi-
dence threshold. This shows that the model considers
an object as detected only if it has a confidence level
of at least 25%, and any detected objects falling below
this threshold are disregarded (Yadav et al., 2022).
Furthermore, Table 2 shows the confidence scores
when the model was tested under different Gaussian
blurriness levels. With an exception for the first level
of blurriness [i.e. (5×5)], the confidence scores at
all other levels reduced according to the increasing
level of image blurriness. The maximum level of re-
duction in the median confidence score was 27% at
the Gaussian kernel size of (11×11). Such a reduc-
tion is sufficiently significant to indicate a potential
to investigate the confidence score as a proxy to de-
tect model drift. The histograms in Figure 2 confirm
and provide a more comprehensive observation of the
changes in the confidence scores. In addition to the
shift in the overall confidence scores, it is observed
that the number of detections reduced as the level of
blurriness increased. At the highest level of blurri-
ness, there were only 222 detections compared to 603
detections achieved in the clear image set. Abnormal
changes in the number of detections might be another
valuable information for detecting concept drift.
5 CONCLUSIONS
This paper presents a preliminary research on concept
drift phenomena for ship detection in remote sensing
images. A widely known YOLOv5 model was em-
ployed as ship detection model in this paper and the
model performance was validated against images sub-
jected to artificial blurriness of different limits. The
results show that the object detection model degrades
its performance (in terms of both accuracy and confi-
dence level) due to model drift. These results demon-
strated the effects of model drift in a simple, manu-
ally controlled context. In addition, the results pro-
vide initial evidence suggesting the potential use of
the confidence scores and the number of detections
for automatic detection of model drift.
This paper is the first preliminary study of the im-
pact of model drift phenomena on the performance of
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
752
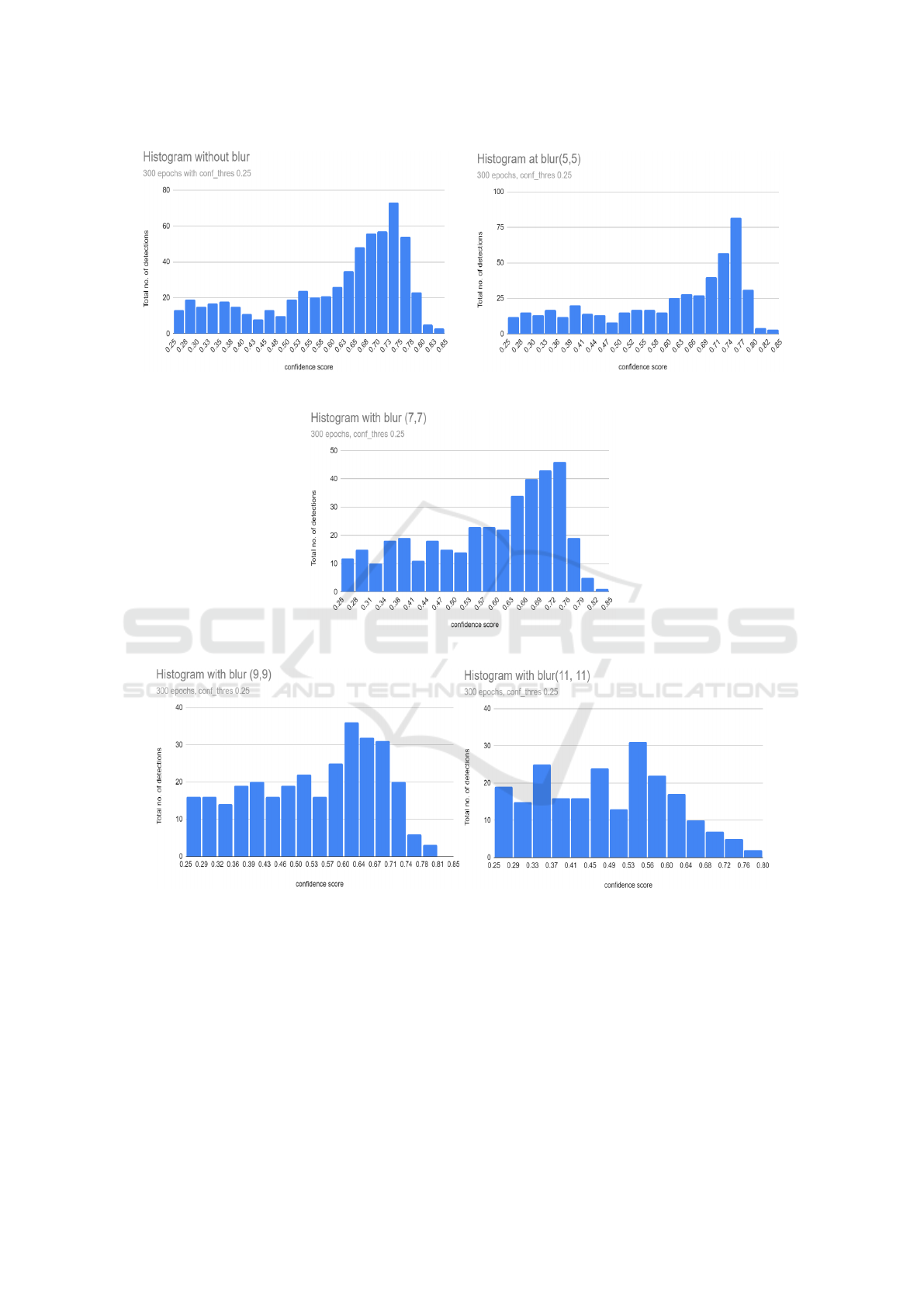
(a) Total detections= 603, without blur (b) Total detections= 485, blur (5,5)
(c) Total detections= 388, blur (7,7)
(d) Total detections= 311, blur (9,9) (e) Total detections= 222, blur (11,11)
Figure 2: Histogram of confidence scores with 0.25 threshold for testing on both non-degraded and degraded test images at
300
th
epoch.
the ship detection model, and does not fully develop
a model drift detection method. That potential can
be investigated in future research. Another potential
direction is to investigate how data augmentation can
alleviate the effects of model drift in ship detection
models.
ACKNOWLEDGEMENTS
The authors would like to express their gratitude to the
CAMEO (Creating an Architecture for Manipulating
Earth Observation Data) project team for their support
during our research. They also acknowledge the fi-
nancial support awarded to the CAMEO project under
the Disruptive Technology Innovation Fund (DTIF),
Effects of Model Drift on Ship Detection Models
753

an initiative of the Irish Government’s Department of
Enterprise Trade and Employment (DETE).
REFERENCES
Bayram, F., Ahmed, B. S., and Kassler, A. (2022). From
concept drift to model degradation: An overview on
performance-aware drift detectors. Knowledge-Based
Systems, 245:108632.
Chen, J., Chen, K., Chen, H., Zou, Z., and Shi, Z. (2022). A
degraded reconstruction enhancement-based method
for tiny ship detection in remote sensing images with
a new large-scale dataset. IEEE Transactions on Geo-
science and Remote Sensing, 60:1–14.
Chen, L., Shi, W., and Deng, D. (2021). Improved yolov3
based on attention mechanism for fast and accurate
ship detection in optical remote sensing images. Re-
mote Sensing, 13(4).
Chen, Y. (2018). Airbus ship detection-traditional v . s .
convolutional neural network approach.
Ding, J., Xue, N., Xia, G.-S., Bai, X., Yang, W., Yang,
M. Y., Belongie, S., Luo, J., Datcu, M., Pelillo, M.,
and Zhang, L. (2022). Object detection in aerial im-
ages: A large-scale benchmark and challenges. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 44(11):7778–7796.
Fr
´
ıas-Blanco, I., Campo-
´
Avila, J. d., Ramos-Jim
´
enez, G.,
Morales-Bueno, R., Ortiz-D
´
ıaz, A., and Caballero-
Mota, Y. (2015). Online and non-parametric drift de-
tection methods based on hoeffding’s bounds. IEEE
Transactions on Knowledge and Data Engineering,
27(3):810–823.
Gama, J. a.,
ˇ
Zliobaitundefined, I., Bifet, A., Pechenizkiy,
M., and Bouchachia, A. (2014). A survey on concept
drift adaptation. ACM Comput. Surv., 46(4).
Hashmani, M., Syed, M., Alhussian, H., Rehman, M., and
Budiman, A. (2019). Accuracy performance degra-
dation in image classification models due to concept
drift. International Journal of Advanced Computer
Science and Applications, 10.
Huang, Z., Jiang, X., Wu, F., Fu, Y., Zhang, Y., Fu, T., and
Pei, J. (2023). An improved method for ship target
detection based on yolov4. Applied Sciences, 13(3).
Li, K., Wan, G., Cheng, G., Meng, L., and Han, J. (2020).
Object detection in optical remote sensing images: A
survey and a new benchmark. ISPRS Journal of Pho-
togrammetry and Remote Sensing, 159:296–307.
Liu, Z., Wang, H., Weng, L., and Yang, Y. (2016). Ship
rotated bounding box space for ship extraction from
high-resolution optical satellite images with complex
backgrounds. IEEE Geoscience and Remote Sensing
Letters, 13(8):1074–1078.
Mehmood, H., Khalid, A., Kostakos, P., Gilman, E., and
Pirttikangas, S. (2023). A novel edge architecture and
solution for detecting concept drift in smart environ-
ments. SSRN Electronic Journal.
Raab, C., Heusinger, M., and Schleif, F.-M. (2020). Re-
active soft prototype computing for concept drift
streams. Neurocomputing, 416:340–351.
Wang, J., Yang, W., Guo, H., Zhang, R., and Xia, G.-S.
(2021). Tiny object detection in aerial images. In 2020
25th International Conference on Pattern Recognition
(ICPR), pages 3791–3798.
Webb, G., Lee, L., and Goethals, B. e. a. (2018). Analyzing
concept drift and shift from sample data. Data Min
Knowl Disc, 32:1179–1199.
Wu, Z., Hou, B., Ren, B., Ren, Z., Wang, S., and Jiao, L.
(2021). A deep detection network based on interaction
of instance segmentation and object detection for sar
images. Remote Sensing, 13(13).
Xu, Q., Li, Y., and Shi, Z. (2022). Lmo-yolo: A ship detec-
tion model for low-resolution optical satellite imagery.
IEEE Journal of Selected Topics in Applied Earth Ob-
servations and Remote Sensing, 15:4117–4131.
Yadav, P. K., Thomasson, J. A., Searcy, S. W., Hardin,
R. G., Braga-Neto, U., Popescu, S. C., Martin, D. E.,
Rodriguez, R., Meza, K., Enciso, J., Diaz, J. S.,
and Wang, T. (2022). Assessing the performance of
yolov5 algorithm for detecting volunteer cotton plants
in corn fields at three different growth stages. Artifi-
cial Intelligence in Agriculture, 6:292–303.
Zhang, L., Li, C., and Sun, H. (2022). Object detec-
tion/tracking toward underwater photographs by re-
motely operated vehicles (rovs). Future Generation
Computer Systems, 126:163–168.
Zhang, Y., Yuan, Y., Feng, Y., and Lu, X. (2019). Hier-
archical and robust convolutional neural network for
very high-resolution remote sensing object detection.
IEEE Transactions on Geoscience and Remote Sens-
ing, 57(8):5535–5548.
Zhao, Z.-Q., Zheng, P., Xu, S.-T., and Wu, X. (2019). Ob-
ject detection with deep learning: A review. IEEE
Transactions on Neural Networks and Learning Sys-
tems, 30(11):3212–3232.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
754
