
Adapted Conflict Detection for Conflict Based Search
Avgi Kollakidou
a
and Leon Bodenhagen
b
Mærsk Mc-Kinney Møller Institute, University of Southern, Denmark
Keywords:
Conflict Based Search, Multi-Agent Path Finding, Navigation.
Abstract:
Mobile robots are increasingly deployed in various applications, including autonomous vehicles and logistics.
Conflict-Based Search (CBS) is a promising approach for Multi-Agent Path Finding (MAPF), but has limita-
tions when applied to real-world scenarios. This paper explores the challenges of adapting CBS to real-world
mobile robotics, focusing on additional conflicts caused by imperfect navigation. We propose an Adaptive
Conflict Detection (ACD) approach that proactively identifies conflicts within a rolling time window, making
CBS more suitable for real-world applications. Both virtual and real robots are used to evaluate the impor-
tance of an adaptation to CBS if adapted to real scenarios. Experimental results show that ACD outperforms
traditional CBS when penalties for conflict resolution are applied, demonstrating its potential for improved
performance and reliability in practical multi-agent path planning applications.
1 INTRODUCTION
Mobile robots have found their way into an ever-
expanding array of applications, from autonomous
vehicles and traffic management to automated ware-
house logistics and robotics. With their increasing
deployment in real-world scenarios in particular un-
structured environments, we encounter a host of com-
plex challenges that push the boundaries of conven-
tional navigation algorithms.
One of the fundamental problems in multi-robot
systems is Multi-Agent Path Finding (MAPF), which
involves finding collision-free paths for a group of
agents operating simultaneously within a shared en-
vironment. The input to the MAPF problem is an
undirected, unweighted graph G = (V, E), and a set
of k agents with a starting vertex s
i
and target vertex
t
i
each. The MAPF solution S = {π
i
, ..., π
k
} is a set
of action sequences for each agent π
i
= (α
1
, ..., α
n
) ,
with all sets able to be carried out concurrently with-
out conflicts. The complexity of MAPF increases
with the number of agents and the intricacy of the
environment they must navigate. The search for op-
timal solutions in such scenarios is notoriously time-
consuming and computationally demanding.
Conflict Based Search (CBS) (Sharon et al., 2015)
has emerged as a promising two-stage strategy for
tackling the MAPF problem. CBS revolves around
a
https://orcid.org/0000-0002-0648-4478
b
https://orcid.org/0000-0002-8083-0770
the identification and resolution of conflicts that arise
during the path planning process. While CBS pro-
vides an effective framework for MAPF, it is not with-
out its shortcomings, especially when confronted with
the realities of the real world.
One significant limitation of CBS becomes appar-
ent when we attempt to adapt it to the complexities
of real-world mobile robotics. In the virtual world of
CBS, units of time and velocity are abstract concepts
that often do not seamlessly translate into the physical
reality of real robots. In the real world, factors such
as acceleration, deceleration, dynamic obstacles, and
varying terrains introduce complexities that challenge
the assumptions made by traditional CBS algorithms,
as can also be seen in fig. 1.
These disparities indicate the necessity of reeval-
uating and enhancing CBS for real-world mobile
robotics applications. We must address the limita-
tions stemming from the mismatch between the per-
fect model and the physical world. Our goal is to de-
velop solutions that account for the nuances of real
robots and unpredictable real-world scenarios.
In this work, we delve into the inherent limitations
of CBS when applied to real-world scenarios, particu-
larly focusing on the challenge of additional conflicts
occurring due to imperfect navigation.
Kollakidou, A. and Bodenhagen, L.
Adapted Conflict Detection for Conflict Based Search.
DOI: 10.5220/0012438000003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 1, pages 367-373
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
367
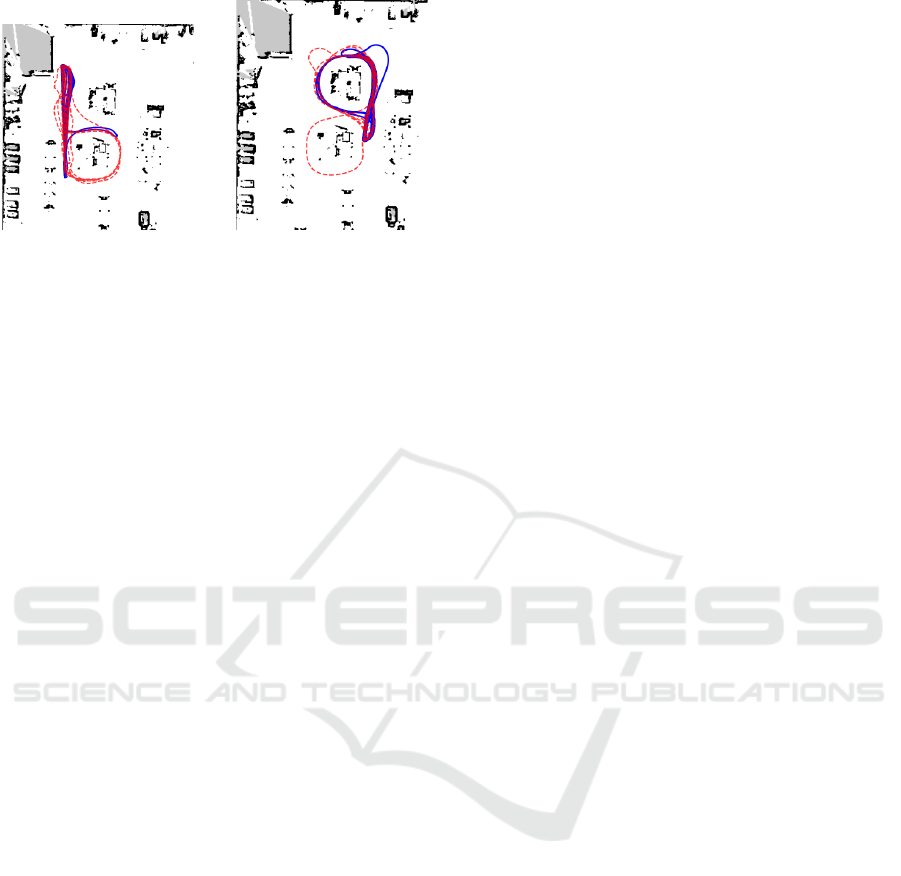
(a) Mission 3. (b) Mission 5.
Figure 1: Robot trajectories in lab experiments (2 out of 6
missions). Blue: single robot runs; Red: multi-robot runs.
2 RELATED WORK
The field of Multi-Agent Path Finding (MAPF) has
evolved considerably in recent years, driven largely
by the expanding role of mobile robotics across var-
ious domains, such as warehouse logistics (Wurman
et al., 2008) or video games (Ma et al., 2017). In
this context, Conflict-Based Search (CBS) has been
a method for addressing the MAPF problem. This
section examines the current scope of CBS, its limi-
tations, and the emerging research trends that empha-
sise the necessity to tailor CBS for the intricate de-
mands of real-world mobile robotics as well as strate-
gies for real time conflict avoidance.
CBS (Sharon et al., 2015) is an optimal solution
to the MAPF problem and is divided into two levels
each having a distinct task: individual path planning,
and constraint definition from detected conflicts. On
the low level, each agent searches for a path individu-
ally and independently, ignoring all other agents’ po-
sitions or plans, using the A* algorithm. A list of con-
straints, derived from previously existing conflicts, is
provided by the upper-level. For the first low level
search, an empty list of constraints exists. If a node
is generated where agent α
i
needs to occupy vertex
v at time t and a constraint exists that involves the
same configuration, that node is discarded. Likewise,
if agent α
i
is to traverse edge e at time t and a con-
straint exists involving that edge, the node is also dis-
carded. However, the method encounters substantial
challenges when transposed into real-world scenarios.
Primary among these challenges is the abstraction
of unit time and velocity in CBS. In theoretical mod-
els, actions are assumed to occur in fixed, discrete
time steps, a simplification that does not translate well
to the real world, where mobile robots exhibit var-
ied velocities and motions are continuous. This dis-
crepancy limits CBS’s direct applicability in practical
settings, where factors like acceleration, deceleration,
and dynamic obstacles play a significant role. Several
works have attempted to bridge this gap by expand-
ing CBS into continuous-time frameworks e.g. with
Increasing Cost Tree Search (Walker et al., 2021) or
by calculating safe intervals representing time peri-
ods when an agent can occupy a vertex without collid-
ing with moving obstacles (Andreychuk et al., 2021).
These, however, have not been adequately tested in
the real world.
Planning for multiple robots while considering
synergies and their temporal dependencies was also
considered with promising results (Jiang et al., 2019).
The paper assumes that robots can communicate con-
tinuously and cost-free, which presents challenges for
practical implementation in the real world.
Traditional navigation techniques, delegate the
tackling of any agents that might be encountered
when navigation to their local planners. Local plan-
ning is of course a large research field with many ap-
proaches. For example, the Dynamic Window Ap-
proach (DWA) is known for its fluid movement in
trajectory planning, though it faces challenges in ef-
ficiency due to limited perception of obstacle den-
sity (Fox et al., 1997). The Enhanced Vector Field
Histogram, a refined version of the Vector Field His-
togram (VFH), demonstrates notable effectiveness in
obstacle avoidance, with enhancements like VFH+
ensuring smoother trajectories and greater reliabil-
ity (Borenstein et al., 1991; Ulrich and Borenstein,
1998).
Furthermore recent works use learning-based
strategies in multi-robot navigation. Integration of
deep learning with traditional robotic control strate-
gies to enhance efficiency and adaptability in dy-
namic environments is proposed in (Han et al., 2022).
This is a distributed approach combining the recip-
rocal velocity obstacle (RVO) concept with deep re-
inforcement learning, offering a solution for recipro-
cal collision avoidance in complex scenarios was in-
troduce. A combined model utilising convolutional
neural networks and graph neural networks, enabling
effective communication and decision-making among
robots was suggested for decentralised path planning
(Li et al., 2020). (Bae et al., 2019) proposes a rein-
forcement learning-based path planning method using
Deep Q-learning combined with CNNs.
CBS provides a solid theoretical foundation for
MAPF, but its idealised assumptions necessitate
significant modifications to effectively address the
challenges posed by real-world conditions such as
continuous-time motion, dynamic environments, and
complex terrains. The ongoing research in this field
suggests that bridging the theoretical-practical di-
vide in CBS is an area ripe for exploration, offering
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
368

substantial opportunities for advancements in mobile
robotics deployed in real-world settings.
In the following sections, we delve deeper into
the inherent limitations of CBS in practical scenar-
ios, particularly emphasising the additional conflicts
arising due to imperfect navigation. Our methodol-
ogy aims to address these limitations, and our exper-
imental findings offer insights into developing more
robust and adaptable solutions for real-world mobile
robotics.
3 METHODOLOGY
In this section, we delve into the real-world limita-
tions of Conflict-Based Search (CBS) as applied to
Multi-Agent Path Finding (MAPF). CBS relies on
certain assumptions which often diverge significantly
from the complexities of the real world. To assess the
impact of these deviations, we conducted experiments
with MiR200 robots, exploring how multiple robots
assigned different assembly missions affect task com-
pletion times. We also introduced noise elements
to replicate real-world irregularities and propose an
adaptive conflict resolution method. This approach
considers a time window to proactively detect and ad-
dress conflicts, making CBS more suitable for real-
world scenarios. Furthermore, we discuss the possi-
bility of dynamically determining the rolling window
size based on map topology, path cost, and the number
of robots, to optimise coordination in various settings.
3.1 CBS Limitations in the Real World
MAPF depends on several assumptions: Time is dis-
cretised in unit time steps during which, an agent can
occupy one vertex and each vertex can accommodate
only a single agent. Two types of actions can be per-
formed with unit cost: move to an adjacent vertex,
or wait in the current vertex. Reality, however, dif-
fers substantially. Robots do not move with constant
velocity or at unit time. Additionally, the grid oc-
cupancy of an agent is usually larger than a single
grid cell, as not only is its footprint larger, but also
a buffer area around the robot is considered for safety.
If another robot or an obstacle is within this area, the
robots in the real world will engage the emergency
break and stop moving.
To assess how much robots deviate from their
planned trajectories in the real world, we conducted
a series of experiments to investigate the navigational
performance of agents in controlled lab conditions.
The experimental environment was designed to repli-
cate a flexible assembly setting featuring multiple
Figure 2: Mean of mission completion times for single and
multi-robot runs with their respective standard deviations.
workstations. We used MiR200 robots equipped with
the 3.12 software version. The primary objective was
to investigate how the introduction of multiple robots,
each assigned different assembly missions, influenced
the overall running time of the tasks. Our experimen-
tal setup involved two key scenarios: one with a single
robot executing all missions sequentially, and another
with three robots, each independently assigned mis-
sions. Both scenarios were repeated 10 times to allow
for deviations, and the average time was calculated.
The aim was to assess the impact of multiple robots
working simultaneously within the same space.
For the second scenario, we introduced three
robots, with each robot assigned random assembly
missions. These missions were randomly assigned,
and the planning of the path to accomplish each mis-
sion remained consistent with the single robot sce-
nario. We monitored and documented the time taken
by each robot to complete their respective missions.
The trajectories of an agent during single-robot
(SR) and multi-robot (MR) runs can be seen in fig. 1
for two different missions. Trajectories for SR runs
are very similar but not identical which can then lead
to conflicts as timings vary. Trajectories of MR runs
include larger deviations as well as detours. The ef-
fect of such deviations can be seen on the mission
completion times fig. 2.
3.2 Noise Introduction
In order to replicate real-world irregularities in sim-
ulation, noise was introduced in the agents’ paths.
This noise was incorporated by introducing waiting
actions. At each step along the path a vertex had the
possibility of being repeated with a specified proba-
bility. For the purposes of our experiments, we set
this probability at 10%. As the identical goal ver-
tex is inserted in the plan, the robot waits for one
time-step at said vertex. This intentional inclusion of
noise allowed us to more accurately replicate the un-
predictable nature of real-world scenarios and assess
Adapted Conflict Detection for Conflict Based Search
369

Figure 3: Conflicts definitions: Vertex conflict (left), Edge
conflict (right).
the robots’ planning in challenging, dynamic environ-
ments.
3.3 Adaptive Conflict Resolution
Considering the previous experiments, where robots
encountered conflicts despite optimal path planning,
we recognise the need to adapt existing coordination
and conflict resolution methods to better address real-
world scenarios. In particular, we propose an adap-
tive approach based on Conflict-Based Search (CBS),
which considers the inherent uncertainties and dy-
namic nature of robot coordination in practical set-
tings.
In traditional CBS, conflict detection typically oc-
curs for a single time instance, and assumes perfect
execution of robot plans. There are several types
of MAPF conflicts discussed in the literature (Stern
et al., 2019b). In this work, we consider two types:
vertex and edge conflicts (fig. 3). A vertex conflict
arises when two agents, a
i
and a
j
, are planned to oc-
cupy the same vertex, v, during the same time step
and is defined as C
v
= ⟨a
i
, a
j
, v, t⟩. An edge conflict
occurs when two agents are planned to traverse the
same edge, connecting vertex v
1
and v
2
, during the
same time step and is defined as C
e
= ⟨a
i
, a
j
, v
1
, v
2
, t⟩.
While this approach is well-suited for perfect sce-
narios, it often falls short in addressing real-world
complications, such as minor deviations from planned
paths, variations in robot speed, or dynamic environ-
mental factors.
3.3.1 Rolling Window Conflict Detection
To enhance the CBS framework’s adaptability to real-
world conditions, we introduce the concept of Rolling
Window Conflict Detection. This method involves
observing the robots’ plan within a time window,
rather than at a single instance. The rolling window
allows us to monitor the robots’ movements and iden-
tify potential conflicts that might arise due to imper-
fect plan execution.
By increasing the time period where conflicts are
considered, we can proactively detect conflicts and
initiate conflict resolution strategies in advance. This
adaptability to real-time conditions mitigates the im-
pact of conflicts and should minimise delays upon ex-
ecution. Additionally, reducing the conflicts that the
robots will encounter upon execution, will increase
reliability and consistency. Execution consistency is
a well sought after attribute for mobile robots that
should be deployed along humans, as they increase
the trust in the agent by the user as well as bystanders.
Assuming:
s – is the window size.
α
i
– is the agent of interest.
v – is the vertex where agent α
i
is positioned.
t – is the current time.
We expand the search for vertex conflicts as fol-
lows:
C⟨α
i
, v, t, s⟩ =
t+
s−1
2
[
τ=t−
s−1
2
C
v
= ⟨a
i
, a
j
, v, t⟩ (1)
Where:
τ – is a time variable that iterates through the time
interval from t −
s−1
2
to t +
s−1
2
.
Conflicts(α
i
, v, τ) – represents the set of conflicts
that may arise at time τ between agent.
3.3.2 Dynamic Rolling Window Size
We propose a dynamic determination of the rolling
window size to the specific characteristics of the robot
coordination scenario. This adaptability is achieved
by considering a combination of map topology, path
cost, and conflicts arising from the inclusion of noise
in the robot’s plan.
• Map Topology: The rolling window size is re-
lated to the map’s size. In scenarios with larger
and sparser workspaces, a smaller rolling win-
dow may be preferable, as robots should come
into fewer conflicts. Conversely, in more intricate
or congested workspaces, a larger rolling window
might be suitable, as robots encounter a higher
density of potential collision points. By aligning
the rolling window size with the map’s complex-
ity, we can optimise robot coordination in differ-
ent environments.
• Path Cost: The cost of the planned paths also
plays a crucial role in determining the rolling win-
dow size. Higher-cost paths may necessitate a
larger rolling window, as they can pose a greater
risk of conflict due to longer traversal times. Con-
versely, lower-cost paths may allow for smaller
rolling windows, as the paths are inherently less
likely to result in conflicts. By adapting the rolling
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
370

Figure 4: Effects of noise addition and conflict penalties
after post-noise conflict detection in multi-robot runs (mean
values).
window size to the path cost, we strike a balance
between efficiency and conflict prevention.
• Number of Robots: in the environment is a cru-
cial factor influencing the rolling window size.
In cases with a larger number of robots, a larger
rolling window may be beneficial, as it enhances
conflict detection in crowded settings. Con-
versely, with fewer robots, a smaller rolling win-
dow can be employed, allowing for less lengthy
conflict checks and facilitating smoother coordi-
nation among a smaller group.
4 RESULTS
4.1 Noise and Penalties
Following the introduction of noise, the revised paths
underwent a comparison to identify any emergent
conflicts. This enabled us to replicate real-world sce-
narios where conflicts may arise as a result of im-
perfect velocities or time delays. In the event a con-
flict was detected, a conflict penalty was assigned to
the overall cost, to emulate the evading manoeuvre
or waiting actions the agent would have to employ to
overcome the detected conflict. For the purpose of
this evaluation, the conflict penalty value was set to 3.
Figure 4 shows the effect the inclusion of noise
has on the path costs of agents. Six simulated mis-
sions were used, with varying lengths and complexi-
ties as seen in fig. 5. The missions were executed 10
times and the reported numbers represent their mean.
The optimal path cost for each mission is presented,
along with the cost for the same agent when navi-
gating in the environment along other agents. The
included noise for both sessions as well as the de-
duced conflict penalty is shown to demonstrate the
importance of a more robust CBS solution when in-
tended for the real world. The mean penalties as-
Figure 5: Missions used for evaluation and optimal paths
derived with A*.
signed amount to up to 21.6% of the final path cost
(minimum: 3.5%).
4.2 Adaptive Conflict Detection
In order to evaluate the impact of the Adaptive Con-
flict Detection approach on multi-agent path planning,
a series of experiments were conducted on a dataset
of simulated missions. The experiments were con-
ducted on a simplified map scenario produced by us
as well as the MAPF dataset (Stern et al., 2019a),
which provides a diverse set of benchmark scenarios
for MAPF. These scenarios encompass a wide range
of complexities, map topologies, and mission char-
acteristics, making them a valuable resource for as-
sessing the performance of path planning algorithms
in diverse and challenging real-world-inspired envi-
ronments. In this section, we present and discuss the
results of these experiments, and potential benefits of
the Adaptive Conflict Detection (ACD) approach in
real-world MAPF applications.
Initially, the ACD approach showed, as expected,
a higher path cost compared to traditional CBS, pri-
marily due to the increased number of detected con-
flicts. The rolling window approach yielded higher
path costs at a maximum of 18% increase. How-
ever, with the introduction of noise, and the penal-
ties resulting from the subsequent search for arising
conflicts, the ACD approach demonstrated superior
performance. Conflict penalties applied on the multi-
robot path costs resulting from simple CBS were up
to a mean of 27.9% of the initial path cost for mis-
sion 1 and a minimum mean of 18.6% for mission
2, whereas the maximum penalty applied on a path
Adapted Conflict Detection for Conflict Based Search
371
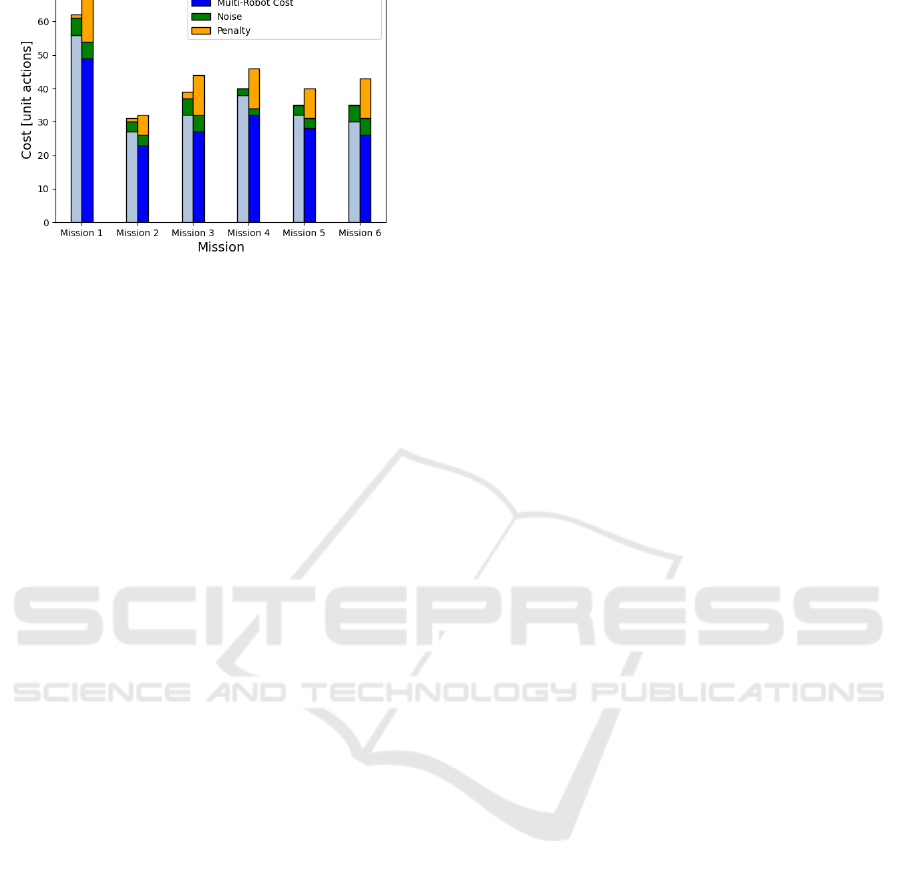
Figure 6: Comparison of CBS with rolling window conflict
detection against basic CBS when noise is included.
resulting from the ACD approach was 5.1% for mis-
sion 3 (minimum 0%) (fig. 6). This outcome suggests
that the ACD approach, with its adaptability and early
conflict detection capabilities, is well-suited for real-
world scenarios where deviations from planned paths
and unexpected factors can impact multi-agent coor-
dination.
4.3 Conflict Penalty Size
In the evaluation of the Adaptive Conflict Detection
approach, an essential aspect was the determination
of an appropriate conflict penalty size. Three distinct
considerations were taken into account to make an in-
formed decision regarding penalty values.
Firstly, a conservative conflict penalty of 3 was
considered in simulation to avoid collisions during a
conflict as the agent would need to a) detect the con-
flict, b) move to avoid it and c) return to its original
path.
Secondly, the effect a conflict has on mission com-
pletion times in simulation was considered. This was
calculated by comparing the increased mission com-
pletion time of agents when considering the multi-
robot scenarios against the optimal solution of single-
agent runs, divided by the amount of conflicts that oc-
curred.
Finally, the time taken in real-world experiments
to overcome conflicts were calculated. The variance
of the additional actions required to complete a mis-
sion in case of a conflict was very large, spanning
from 15% increase of the path length to 100% dou-
bling the distance travelled by the agent.
With all three considerations taken, the conserva-
tive conflict penalty was used to avoid inflating the ad-
vantages of ACD, but it is evident that such a penalty
in the real world would be larger.
5 DISCUSSION
The effectiveness of our Adapted CBS in real-world
scenarios is depended on map topology. The com-
plexity and layout of the environment, such as nar-
row passageways, play an important role in both the
performance and applicability of the algorithm. In
densely populated or cluttered spaces the frequency
and complexity of conflicts increase, thereby increas-
ing the need for conflict resolution and requires larger
window sizes. On the other hand, simpler maps with
large open spaces, would, in theory, feature fewer
conflicts and therefore the need of adaptation might
be smaller. A consideration for applying the method
locally in critical areas might be worthwhile.
The mission selection is another critical factor that
could potentially influence our results. The inher-
ent complexity of the chosen missions - whether they
are relatively straightforward or particularly challeng-
ing, clustered together in certain areas, or spread out
through the map - directly affects the performance
of the adapted CBS methodology. Simple missions,
with direct paths and minimal obstacles, may not ad-
equately test the robustness and adaptability of the
algorithm, potentially leading to an overestimation
of its effectiveness in more complex scenarios. On
the other hand, excessively difficult missions could
push the system to its limits, potentially highlighting
weaknesses that are less pronounced in standard op-
erational conditions. In our study, we attempted to
choose missions that were neither too easy nor too
hard. This way, we could properly test our system
without pushing it too far. Our goal was to see how
well the algorithm works under realistic conditions,
but without making the tasks overly complicated.
6 CONCLUSIONS
In this study, we conducted an evaluation of an Adap-
tive Conflict Detection (ACD) approach for multi-
agent path planning, aimed at addressing the com-
plexities and uncertainties of real-world scenarios.
Our experiments revealed insights into the adaptabil-
ity and effectiveness of the ACD approach.
The introduction of noise in our simulations, mim-
icking real-world irregularities, initially led to an in-
creased path cost as conflicts were detected more
frequently. However, our approach, with its abil-
ity to adapt and proactively identify conflicts within
a rolling time window, demonstrated its true poten-
tial when penalties for conflict resolution were ap-
plied. These penalties, chosen through a combi-
nation of practical considerations, showed that the
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
372

ACD approach outperformed traditional Conflict-
Based Search (CBS) in real-world-inspired scenarios,
where deviations from planned paths and unexpected
factors could influence multi-agent coordination.
In our exploration of penalty size, we considered
multiple factors, including conservative values, simu-
lated mission impact, and insights from real-world ex-
periments. This comprehensive approach to penalty
selection ensures that the penalties are not exagger-
ated purposefully to magnify the approach’s advan-
tages but show a fair if not understated estimate of the
method’s effect.
In summary, the results of our experiments sug-
gest that the Adaptive Conflict Detection approach is
a promising candidate for addressing the challenges
of real-world multi-agent path planning. By proac-
tively detecting and resolving conflicts, this approach
showcases its potential for improved performance and
reliability in practical applications.
ACKNOWLEDGEMENTS
This work is supported by the Innovation Fund Den-
mark for the project DIREC (9142-00001B) and the
SDU Industry 4.0Lab.
REFERENCES
Andreychuk, A., Yakovlev, K., Boyarski, E., and Stern,
R. (2021). Improving continuous-time conflict based
search. In Proceedings of the AAAI Conference on Ar-
tificial Intelligence, volume 35.
Bae, H., Kim, G., Kim, J., Qian, D., and Lee, S. (2019).
Multi-robot path planning method using reinforce-
ment learning. Applied sciences, 9(15):3057.
Borenstein, J., Koren, Y., et al. (1991). The vector
field histogram-fast obstacle avoidance for mobile
robots. IEEE transactions on robotics and automa-
tion, 7(3):278–288.
Fox, D., Burgard, W., and Thrun, S. (1997). The dy-
namic window approach to collision avoidance. IEEE
Robotics & Automation Magazine, 4(1):23–33.
Han, R., Chen, S., Wang, S., Zhang, Z., Gao, R., Hao, Q.,
and Pan, J. (2022). Reinforcement learned distributed
multi-robot navigation with reciprocal velocity obsta-
cle shaped rewards. IEEE Robotics and Automation
Letters, 7(3):5896–5903.
Jiang, Y., Yedidsion, H., Zhang, S., Sharon, G., and Stone,
P. (2019). Multi-robot planning with conflicts and syn-
ergies. Autonomous Robots, 43:2011–2032.
Li, Q., Gama, F., Ribeiro, A., and Prorok, A. (2020). Graph
neural networks for decentralized multi-robot path
planning. In 2020 IEEE/RSJ International Confer-
ence on Intelligent Robots and Systems (IROS), pages
11785–11792. IEEE.
Ma, H., Yang, J., Cohen, L., Kumar, T., and Koenig, S.
(2017). Feasibility study: Moving non-homogeneous
teams in congested video game environments. In Pro-
ceedings of the AAAI Conference on Artificial Intel-
ligence and Interactive Digital Entertainment, vol-
ume 13.
Sharon, G., Stern, R., Felner, A., and Sturtevant, N. R.
(2015). Conflict-based search for optimal multi-agent
pathfinding. Artificial Intelligence, 219.
Stern, R., Sturtevant, N. R., Felner, A., Koenig, S., Ma, H.,
Walker, T. T., Li, J., Atzmon, D., Cohen, L., Kumar,
T. K. S., Boyarski, E., and Bartak, R. (2019a). Multi-
agent pathfinding: Definitions, variants, and bench-
marks. Symposium on Combinatorial Search (SoCS).
Stern, R., Sturtevant, N. R., Felner, A., Koenig, S., Ma, H.,
Walker, T. T., Li, J., Atzmon, D., Cohen, L., Kumar,
T. S., et al. (2019b). Multi-agent pathfinding: Defi-
nitions, variants, and benchmarks. In Twelfth Annual
Symposium on Combinatorial Search.
Ulrich, I. and Borenstein, J. (1998). Vfh+: Reliable obsta-
cle avoidance for fast mobile robots. In Proceedings.
1998 IEEE international conference on robotics and
automation (Cat. No. 98CH36146), volume 2, pages
1572–1577. IEEE.
Walker, T. T., Sturtevant, N. R., Felner, A., Zhang, H., Li,
J., and Kumar, T. S. (2021). Conflict-based increas-
ing cost search. In Proceedings of the International
Conference on Automated Planning and Scheduling,
volume 31.
Wurman, P. R., D’Andrea, R., and Mountz, M. (2008). Co-
ordinating hundreds of cooperative, autonomous vehi-
cles in warehouses. AI magazine, 29(1).
Adapted Conflict Detection for Conflict Based Search
373
