
Parking Scheduling Optimisation at Paris Charles de Gaulle
International Airport
Thibault Falque
1,2 a
, Christophe Lecoutre
2 b
, Bertrand Mazure
2 c
and Romain Wallon
2 d
1
Exakis Nelite, France
2
CRIL, Univ. Artois & CNRS, France
Keywords:
Constraint Programming, Optimization, Planning, Application.
Abstract:
Before the COVID-19 health crisis, the International Air Transport Association (IATA) forecasted that air
passengers would almost double by 2036, reaching 7.8 billion people. More than ever, air transport players
such as airline and airport companies, in a strongly competitive climate, need to benefit from a carefully
optimized management of the airport resources in order to improve the quality of services and to control the
induced costs. For example, the allocation of parking spaces for landing aircrafts remains a central issue at
the airports, while optimizing an economic function determined by some business rules. In this paper, we
investigate the Airport Parking Assignment Problem (APAP) with a Constraint Programming (CP) approach.
We introduce a CP model, under the form of a Constraint Optimization Problem, and present some promising
preliminary experimental results from data coming from ADP (Aeroports de Paris).
1 INTRODUCTION
Before the COVID-19 health crisis, the International
Air Transport Association (IATA) forecasted that air
passengers would almost double by 2036, reaching
7.8 billion people. In such a context, optimizing the
management of the airport resources remains essen-
tial to control induced costs while keeping a good
quality of services. For many planning and schedul-
ing air transport problems, techniques and tools devel-
oped from mathematical and constraint programming
remain essential. Specifically, when airline compa-
nies have access to the resources delivered at the air-
port, the consumption of these resources (e.g., check-
in banks, aircraft parkings) must be carefully planned
while optimizing an objective function determined by
some business rules; see, for example, (Mangoubi and
Mathaisel, 1985) (Lim et al., 2005) (Diepen et al.,
2007). At airports, one of the significant combina-
torial problems that need to be solved is the Stand
Allocation Problem. This problem is closely re-
lated to the Gate Allocation Problem, and both
have been extensively studied since the 1980s (Man-
a
https://orcid.org/0000-0003-2803-1530
b
https://orcid.org/0000-0002-2205-6545
c
https://orcid.org/0000-0002-3508-123X
d
https://orcid.org/0000-0001-7200-4279
goubi and Mathaisel, 1985) (Dincbas and Simonis,
1991) (Dorndorf et al., 2008) (Simonis, 2007). In
the following, we will refer to both problems with-
out distinction. The main objective of the Stand
Allocation Problem is to find an optimal assign-
ment of aircraft serving different flights to the avail-
able stands (gates) at the airport. Each flight requires
a specific stand for various tasks, such as passenger
boarding, baggage handling, and refueling.
Definition 1 (Stand). A stand p ∈ S is an aircraft po-
sition. The first type of stands is contact stands (or
hard stand) connected to a terminal by a door and a
gateway while the second type requires a bus to reach
the terminal (remote stands).
Definition 2 (Flight turnaround or rotation). A flight
turnaround (or rotation) φ ∈ Φ comprises at least one
arrival or departure flight or both. We note a
φ
and d
φ
the rotation’s start and end time, respectively (i.e., the
arrival time of the flight at the airport and the depar-
ture time of the flight from the airport).
Definition 3 (Stand operations). The stand operations
of a flight turnaround can be divided into three parts:
(i) operations about the arrival flight composed of the
unboarding of passengers and luggages, (ii) waiting
time, and (iii) operations of the departure flight com-
posed of the boarding of passengers and luggages.
Note that during these operations, we also have air-
Falque, T., Lecoutre, C., Mazure, B. and Wallon, R.
Parking Scheduling Optimisation at Paris Charles de Gaulle International Airport.
DOI: 10.5220/0012437800003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 3, pages 1119-1126
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
1119

craft ground handling operations: catering, refueling,
cabin services, etc.
Definition 4 (Operation). An operation, denoted by
t
i
, is defined by its commencement at time a
i
and its
conclusion at time d
i
at the designated stand for op-
eration t
i
. Each operation is associated with an air-
craft of a specific model, such as an A320 or a B757.
The aircraft type for operation t
i
is identified by k
i
.
The aggregate of all flight operations is denoted as
T . For a specified rotation, φ, its related set of activ-
ities, also known as the set of tasks, is represented as
T
φ
. This set comprises n individual tasks, expressed
as {t
i
| i ∈ 1..n}. We also introduce sets T
n
which con-
sist of tuples of tasks, each tuple containing n tasks.
Depending on the waiting time and for operational
reasons, the aircraft may be moved to another stand,
creating several flight operations. Figures 1 illustrate
the possible cases. This movement requires a towing
tractor and involves a cost for the operator. Figure 1a
presents the case where the arrival and the departure
flight are the same operations. Figures 1b and 1c show
that the waiting time is enough to consider a decom-
position on two or three operations, respectively.
In the context of airport operations, stand assign-
ments are crucial and must be both aligned with the
airport’s services and convenient for passengers. Ac-
cording to (Dorndorf et al., 2007), these assignments
are governed by stringent rules, such as ensuring that
each stand is allocated to only one flight at a time, ad-
hering to spatial limitations for adjacent stands, and
considering the specific preferences of certain air-
crafts for particular stand positions. The literature re-
veals a variety of objectives for addressing this prob-
lem. For example, studies have focused on mini-
mizing passenger walking distances through meth-
ods like binary integer programming (Bihr, 1990)
(Yan et al., 2002), or stochastic models (Yan and
Tang, 2007). Another objective is to minimize the
occurrence of off-gate events, as discussed in (Van-
derstraeten and Bergeron, 1988). Moreover, multi-
objective approaches have been explored:
• (Lim et al., 2005) applied integer programming to
optimize both the reduction of delay penalties and
the total walking distance.
• (Prem Kumar and Bierlaire, 2014) utilized binary
integer programming for threefold optimization:
maximizing the rest time between two turns at a
gate, minimizing the towing cost for aircraft with
extended turns, and reducing overall costs, includ-
ing penalties for not assigning preferred gates to
specific turns.
• Finally, (Dorndorf et al., 2012) employed a clique
partitioning formulation to address four objec-
tives: maximizing the total assignment prefer-
ence score, minimizing the number of unassigned
flights and tows, and enhancing the robustness of
the schedule.
The rest of this paper is organized as follows. In
Section 2, we give some preliminaries regarding con-
straint programming and solving and the stand allo-
cation problem as defined at Paris Airports. In Sec-
tion 3, we present some modeling for the stand allo-
cation problem. Before concluding, we present a few
promising experimental results in Section 4.
2 PRELIMINARIES
2.1 Constraint Optimization Problem
CP (Constraint Programming) (Apt, 2003) (Rossi
et al., 2006) (Lecoutre, 2009) is a powerful and rec-
ognized paradigm for modeling and solving every-
day problems (for example, the timeschedule prob-
lem can be modeled using constraint programming),
as well as combinatorial problems ranging from con-
figuration and planning to bioinformatics. CP offers
generic methods for modeling and solving this type
of problems. It aims to reduce modeling complexity
by being as close to the natural language description
of the problem as possible. In the CP approach, users
define the problem by specifying decision variables
and constraints that define the relationships between
these variables. The objective is to find an assignment
for all variables that satisfies all the given constraints.
This is known as a Constraint Satisfaction Problem
(CSP). The task is then solved by employing special-
ized solvers which use generic methods to efficiently
explore the search space and find solutions that satisfy
all the constraints. A constraint network (CN) is com-
posed of a finite set of variables and a finite set of con-
straints. Each variable X takes its value in a finite set
called domain of X, denoted dom(X). Each constraint
defines a relation on a set of variables. A solution of
a CN is an assignment of values to all its variables
such that all the constraints of the CN are satisfied. A
CN is said to be consistent if it has at least one solu-
tion, and the corresponding decision problem, called
Constraint Satisfaction Problem (CSP), is to deter-
mine whether a CN is consistent. Deciding whether a
CSP is satisfiable is an NP-complete problem (Mack-
worth, 1977). Other combinatorial tasks may interest:
enumerating or counting the set of solutions, calcu-
lating an optimal solution according to a given objec-
tive, etc. We conclude this section by defining one
such task: the constraint optimization problem. A
Constraint Optimization Problem (COP) instance can
be interpreted as a CSP instance with an associated
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
1120
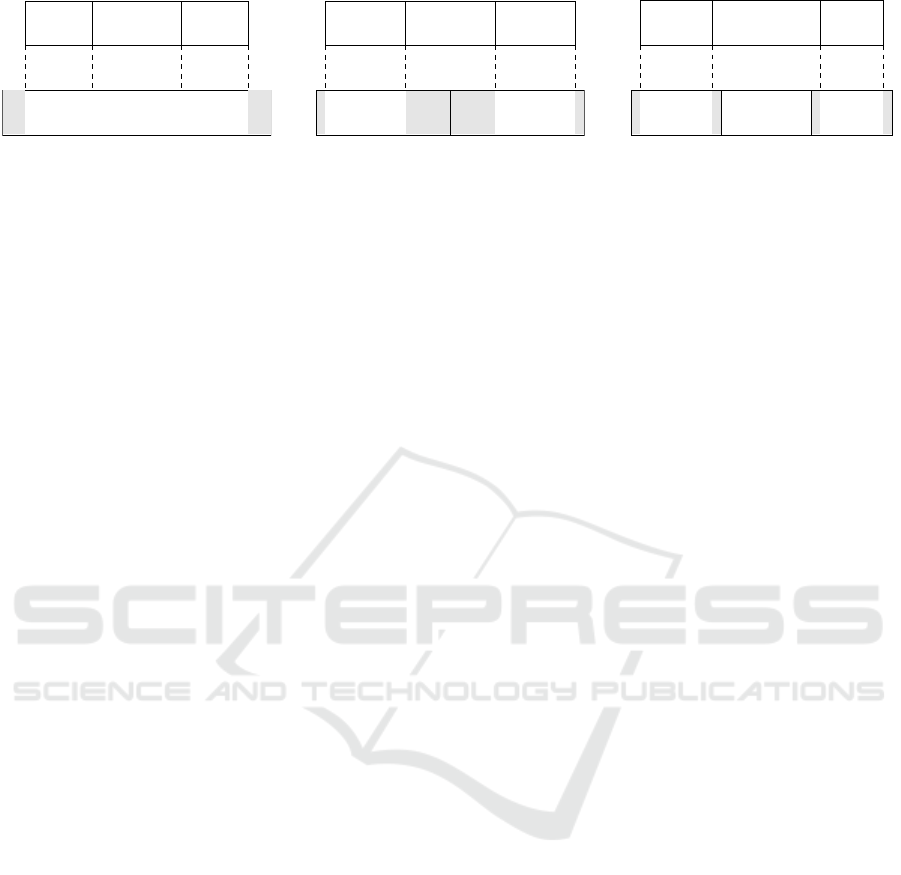
Operation
Unboarding
Waiting
Boarding
(a) Short waiting time – do not split
the rotation.
Unboarding
Waiting
Boarding
Operation 1 Operation 2
(b) Medium waiting time – split in 2
operations.
Unboarding
Waiting
Boarding
Operation 1 Operation 2 Operation 3
(c) Long waiting time – split in 3 op-
erations.
Figure 1: Number of operations depending on waiting time.
cost function. This function gives a numerical value
to each solution of the instance, thereby quantifying
its quality. The objective is to find the solution that
maximizes or minimizes this function. For example,
such a function may maximize (resp. minimize) the
sum or product of certain variables (possibly associ-
ated with coefficients) of the problem.
2.2 Resolution Methods and Heuristics
Backtracking search is a conventional method for ad-
dressing COP instances, functioning as a complete
procedure. It conducts a depth-first exploration of the
search tree, facilitated by a backtracking mechanism
alongside a sequence of decisions and propagations.
There are also incomplete search techniques which do
not ensure algorithmic completeness, but can still be
more effective at locating solutions. Backtrack search
for COP relies on CSP solving: the principle is to
add a special objective constraint obj < ∞ to the con-
straint network (although it is initially trivially satis-
fied), and to update the limit of this constraint when-
ever a new solution is found. It means that any time
a solution S is found with cost B = obj(S), the objec-
tive constraint becomes obj < B. Hence, a sequence
of better and better solutions is generated (satisfiabil-
ity is systematically proved with respect to the cur-
rent limit of the objective constraint) until no more
exists (unsatisfiability is eventually proved with re-
spect to the limit imposed by the last found solution),
guaranteeing that the last found solution is optimal.
The order in which variables are chosen during the
depth-first traversal of the search space is decided by
a variable ordering heuristic. Each heuristic asso-
ciates to a variable a score computed statically, dy-
namically or adaptatively. In this paper we focus
on two heuristics. dom/wdeg is a classical heuristics
(Boussemart et al., 2004) that aggregates by a divi-
sion operator the dom heuristics with a dynamic de-
gree of the variable wdeg. We also use a recent heuris-
tics called Frba/dom (Li et al., 2021) based on the
fail first principle and exploiting two aspects of fail-
ure information collected during the search: the fail-
ure proportion after the propagations of assignments
of variables and the failure length heuristics consid-
ering the length of failures, which is the number of
fixed variables composing a failure. Similar to vari-
able selection heuristics, a value ordering heuristic
is essential to determine the subsequent value to as-
sign. A straightforward heuristic approach involves
utilizing the initial value in the domain, symbolized
by First. This method is frequently adopted due
to its robustness. Recently, a heuristic strategy sug-
gesting the use of the value having the most signifi-
cant effect on the objective function was introduced
in (Fages and Prud’Homme, 2017), labeled as Bivs.
For COPs, it is often advantageous to prioritize the
value observed in the most recent solution using so-
lution saving, as mentioned in works like (Vion and
Piechowiak, 2017) (Demirovic et al., 2018).
2.3 Stand Allocation Formulation
In this section, we consider the formulation of the
Gate Allocation Problem proposed by (Dorndorf
et al., 2008) and (Gu
´
epet et al., 2015) which we will
adapt for a Stand Allocation Problem (without
any loss of generality) and to the case of Paris Air-
ports. The previous section explains that the rotation
can be decomposed in several operations. At Paris
Airports, there can only be two movements for the
same aircraft, i.e., a maximum of 3 parking positions,
and the conditions for determining whether a rotation
must be decomposed depend on certain processing
times. Some physical constraints exist, as imposed
by the airport infrastructure.
Rule 1 (Capacity). The capacity
constraints prevent certain aircraft types
from being placed on some parking.
Rule 2 (No-Overlap). The No-Overlap
constraints reflect the physical impossibil-
ity of assigning two operations (two flights) to the
same parking. An operation t
i
∈ T overlaps with
another operation t
j
∈ T if a
i
< d
t
j
∧ a
t
j
< d
i
. The
set of operations overlapping with t
i
is denoted by O
i
,
and so, contains all operations t
j
overlapping with i.
Rule 3 (Shading constraints). The shading
constraints block the positioning of an aircraft
Parking Scheduling Optimisation at Paris Charles de Gaulle International Airport
1121

on some nearby parking (regardless of the type of
aircrafts, e.g., two aircrafts cannot be simultaneously
assigned to adjacent stands due to space limitations).
Example 1 (Shading constraints). For example, Fig-
ure 2 shows that, if an aircraft is placed on parking
A14 then the parking A16 is “shaded” and vice-versa
(it is symmetrical).
Figure 2: Example for the shading constraint.
Rule 4 (Reduction). The reduction
constraints are similar to the shading
constraints except that they consider aircraft
types. These constraints can be defined by 4-tuples
(k, p,k
′
,∆) with ∆ ⊂ S being a set of parkings. For
every parking p
′
in ∆, a plane of type k
′
is allowed on
p
′
if a plane of type k is placed on p. We note D the
set of all such reductions (all 4-tuples).
Example 2 (Reduction constraint). As an illustration,
considering Figure 3, shading will only be effective if
a specific aircraft type has been placed on A10, then
the reduction will still allow a subset of aircraft types
to be placed on A8 and A12.
Figure 3: Example for the reduction constraint.
Rule 5 (Order). The order constraints im-
pose for two parkings p
1
,p
2
that the aircraft put on
p
1
must arrive and leave before that put on p
2
, if the
two aircrafts have an overlapping time.
Example 3 (Order constraint). Terminal 1 of CDG
(Charles de Gaulle) has a specific infrastructure that
imposes an order constraint. Let us take a
look at Figure 4: if a plane is placed on Y07 and an-
other plane is placed on Y 06, we need to make sure
that the plane on Y07 leaves before the plane on Y 06,
because planes arrive on the outside (route marked by
A) and leave on the inside (route A3). Note that the
direction is reversed if we take stands Z02 and Z01.
We note OR the set of pair of parking p
1
,p
2
while p
1
is before p
2
.
Figure 4: Example of a special traffic situation linked to the
CDG1 infrastructure.
Frequently, some stands are unavailable for sev-
eral hours to several days (for example, for mainte-
nance reasons).
Rule 6 (Unavailable constraints). The
unavailable constraints ensure that
certain stands are not available for a period of time
(which may be periodic). Said differently, we must
remove from the domain the stand for each operation
that overlaps with the period of exclusion. We note
u = (p,s,e) a triplet where p is the stand to exclude, s
and e is the start and end time of the excluded period.
Another type of unavailability, specific to certain
rotations, consists in declaring a list of prohibited
stands for a given rotation.
Rule 7 (Exclusion). The exclusion cons-
traints ensures that certain stands are excluded
from certain rotations under some conditions.
The components for the stand allocation problem
formulation at Paris Airports are given below:
• T the set of operations. The previous section ex-
plains that an operation t
i
∈ T is defined by a start
time a
i
and an end time d
i
. For each operation
t
i
, we also have the set of operations that overlap
with t
i
: O
t
i
.
• S the set of the stands.
• S
i
⊂ S the set of compatible stands (stands with a
capacity compatible with t
i
) for operation t
i
.
• OR the set of pair of parkings for order rules.
• U the set of unavailable rules (i.e., the set of all
triplet (p,s, e)).
• E
i
the set of excluded stands for an operation t
i
.
• Q ⊆ S
2
the set of shadow restrictions. If
(p
1
,p
2
) ∈ Q then two operations that overlap can-
not be placed at the same time on p
1
and p
2
.
• D the set of reductions. For a quadruplet
(k, p,k
′
,∆) ∈ D and an operation t
i
∈ T with an
aircraft type k, if the operation t
i
is assigned to the
parking p, then only operations with an aircraft
type k
′
are allowed to parkings of the set ∆.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
1122

• M P = (m
i,p
)
T ×S
the affinity matrix, i.e., m
i,p
is
the airline satisfaction realized if operation t
i
∈ T
is assigned to stand p.
An assignment I is a mapping between opera-
tions T and stands S . The quality Obj(I) of an as-
signment I is defined by Obj(I) = C(I ) where C is
the total operation-stand affinity. Our objective is
to find an assignment maximizing Obj(I) while re-
specting operation-stand compatibilities, shadowing,
reduction restrictions and overlapping constraints.
3 MODELING
For modeling COP, we have chosen to use the re-
cently developed Python library PyCSP
3
(Lecoutre
and Szczepanski, 2020) that permits to generate spe-
cific instances (after providing ad hoc data) in XCSP3
(Boussemart et al., 2020), which is recognized by
CP solvers such as ACE (AbsCon Essence) (Lecoutre,
2023) and Choco (Prud’homme et al., 2016). In the
following, we show how to model the stand alloca-
tion problem in the context of Paris Airports.
First, we need to introduce the variables of our
model. Actually, in addition to a stand-alone vari-
able used to count the number of rotations that are not
splitted, we need two arrays of variables to represent
assigned stands and their associated rewards:
• x is a matrix of |T | variables having the set of val-
ues {0, ... ,|S| − 1} as domain; x
i
represents the
index (code) of the stand assigned to the task t
i
.
• r is a matrix of |T | variables having the set of val-
ues {0, ... ,100} as domain; r
i
represents the sat-
isfaction of the company for task t
i
.
We now introduce constraints for this problem.
An illustration is now given to facilitate the under-
standing of the various constraints of the model.
Example 4. Let us consider an example with a set
of 5 rotations {φ
1
,. ..,φ
5
}, and a set of 4 stands
{p
1
,. ..,p
4
}. where p
3
and p
4
are assumed to be re-
mote stands; so, we have S
rt
= {p
4
,p
5
}. Information
concerning rotations is given in Table 1.
In the next sections we introduce different model-
ing for the problem. Given the nature of the prob-
lem (and data), it is natural to post so-called ex-
tensional constraints, which explicitly enumerate ei-
ther the allowed tuples (positive table) or the disal-
lowed tuples (negative table) for a sequence of vari-
ables (representing the scope of a constraint). Over
the last decade, efficient algorithms have been devel-
oped to handle such table constraints (Lecoutre, 2011)
(Lecoutre et al., 2015) (Demeulenaere et al., 2016)
(Verhaeghe et al., 2017).
Classical Variant
Model 1 (Classical variant).
x
j
∈ S
remote
,∀(t
i
,t
j
,t
k
) ∈ T
3
(C
1
)
⟨x
j
⟩ ∈ S
i
,
(C
2
)
⟨x
i
,x
j
⟩ /∈ {(p
1
,p
2
),∀p
1
,p
2
∈ Q }
∀t
i
∈ T ,∀t
j
∈ O
i
(C
3
)
⟨x
i
,x
j
⟩ /∈ {(p
1
,p
2
) | p
2
∈ δ},∀t
i
∈ T ,
∀⟨k, p
1
,k
′
,δ⟩ ∈ D | k = kind(i),
∀ j ∈ O
i
| k
′
̸= kind( j)
(C
4
)
⟨x
j
,r
j
⟩ ∈ {(p
1
,r
p
1
j
) | p
1
∈ S
i
},∀t
i
∈ T (C
5
)
⟨x
i
,x
j
⟩ /∈ OR ,∀t
i
∈ T ,∀ j ∈ O
i
(C
6
)
x
i
̸= p, ∀t
i
∈ T ,
∀(p,s, e) ∈ U | overlap(t
i
,s, e)
(C
7
)
x
i
/∈ s,∀i ∈ T , ∀s ∈ E
i
(C
8
)
Note that Constraint C
1
forces the middle parking
to be remote.
Example 5. For our example: T
1
= {φ
1
}, T
2
=
{φ
2
,φ
3
}, T
3
= {φ
4
,φ
5
}. The set of operations
T is composed of each tasks from each rotation:
{t
1
,. ..,t
11
} where t
1
corresponds to the only task
of φ
1
while t
11
corresponds to the third tasks of φ
5
.
So we must post the constraints: x
7
∈ S
remote
and
x
10
∈ S
remote
.
To enforce capacity rules, we post unary con-
straints (see Constraint C
2
).
Example 6. Table 2 provides each parking
capacity for our example. Based on this ta-
ble, we must post the following unary con-
straints: For φ
1
: x
1
∈ {p
1
,p
3
,p
4
,p
5
}. For φ
2
:
x
2
∈ {p
1
,p
2
,p
3
,p
4
,p
5
},x
3
∈ {p
1
,p
2
,p
3
,p
4
,p
5
}. For
φ
3
: x
4
∈ {p
1
,p
2
,p
3
,p
4
,p
5
},x
5
∈ {p
1
,p
2
,p
3
,p
4
,p
5
}.
For φ
4
: x
6
∈ {p
3
,p
4
,p
5
},x
7
∈ {p
3
,p
4
,p
5
},x
8
∈
{p
3
,p
4
,p
5
}. For φ
5
: x
9
∈ {p
4
,p
5
},x
10
∈
{p
4
,p
5
},x
11
∈ {p
4
,p
5
}.
Let us recall that when a parking p
1
is shaded by
a parking p
2
then these two values cannot be assigned
together to any pair of overlapping tasks. This leads
to binary negative table constraints. Although not ex-
plicitly shown below, assigning the same value twice
for any pair of overlapping operations is also forbid-
den (see Constraint C
3
). Constraint C
4
represents the
reduction constraint and is defined with binary
negative tables.
Parking Scheduling Optimisation at Paris Charles de Gaulle International Airport
1123
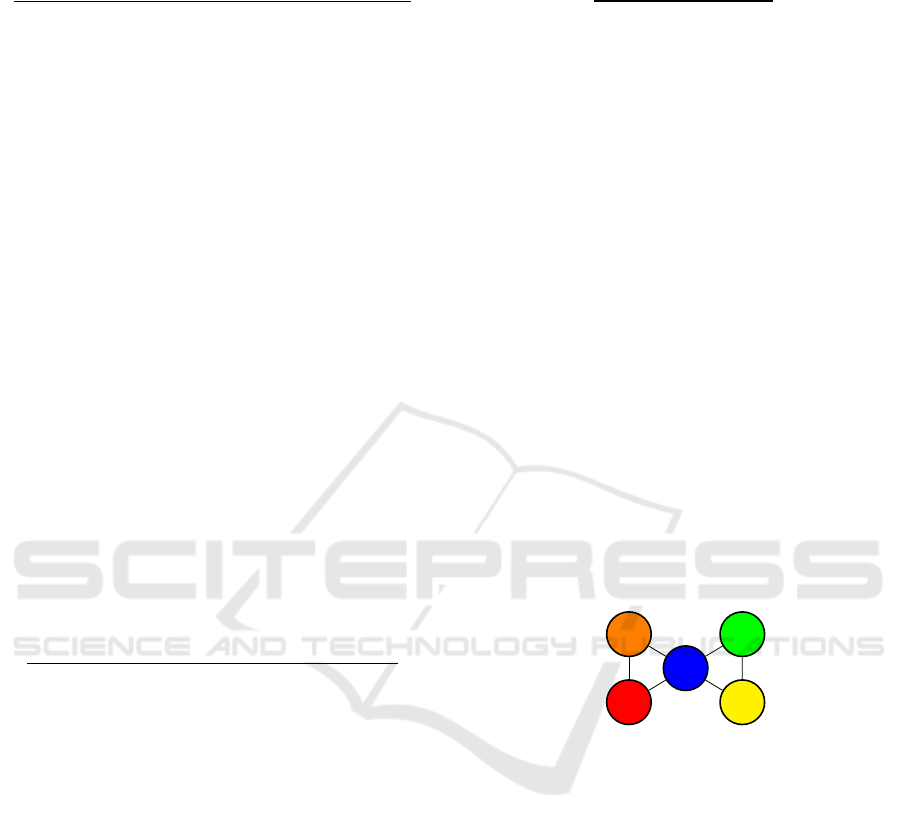
Table 1: Data about rotations.
Rot. airline ntasks kind a
φ
d
φ
φ
1
a
1
1 k
1
8h 10h
φ
2
a
2
2 k
2
8h 12h
φ
3
a
2
2 k
2
12h 16h
φ
4
a
3
3 k
3
9h 15h
φ
5
a
3
3 k
4
12h 18h
Example 7. For our example, suppose
that a reduction constraint exists be-
tween the stands p
1
and p
2
, given by D =
{(k
1
,p
1
,k
3
,{p
2
}),(k
2
,p
1
,k
4
,{p
2
})}. We also have
O
1
= {(t
2
),(t
6
)} and S
φ
1
= {p
1
,p
3
,p
4
,p
5
}. Task
1 from φ
1
overlaps Task 1 of φ
2
. Recall that
kind(φ
2
) = k
2
. So, for the reduction imposed by φ
1
,
we add the constraint that forbid the pair of values
(p
1
,p
2
) for the pair of variables ⟨x
1
,x
2
⟩. In other
words, it is forbidden to use p
2
with the rotation φ
2
because φ
2
does not have the kind allowed by p
2
after placing φ
1
on p
1
(its capacity is reduced), i.e.,
⟨x
1
,x
2
⟩ /∈ {(p
1
,p
2
)}. Although φ
1
overlaps with φ
4
,
there are no restrictions to consider with φ
1
as φ
4
has
a capacity of type k
3
(see Table 1) which is allowed
in relation to the reduction.
According to the airlines preferences from affin-
ity matrix M P , we can post binary table constraints
to “compute” rewards when filtering such constraints
(see Constraint C
5
).
Table 3: Affinity matrix.
Airline / Parking p
1
p
2
p
3
p
4
p
5
a
1
75 75 100 50 50
a
2
60 0 100 50 50
a
3
0 100 80 50 50
Example 8. For our example, let us assume that re-
wards are given by the matrix in Table 3. From the
data in this table, we post the following constraint for
the first rotation (the same principle is adopted for the
other rotations):
⟨x
1
,r
1
⟩ ∈
{(p
1
,75),(p
2
,75),(p
3
,100),(p
4
,50),(p
5
,50)},
Considering the reward variables we can express
the objective function as follows:
maximize
∑
t
j
∈T
w
j
· r
j
This function aims to optimize the cumulative
weighted rewards across all tasks within each rota-
tion. In this context, w
j
is the weight attributed to the
task t
j
. This weight quantifies the importance or pri-
ority of each task. The term r
j
represents the decision
Table 2: Capacity.
Pkg Capacity
p
1
{k
1
,k
2
}
p
2
{k
2
,k
3
}
p
3
{k
1
,k
2
,k
3
}
p
4
{k
1
,k
2
,k
3
,k
4
}
p
5
{k
1
,k
2
,k
3
,k
4
}
variables from the matrix r, specifically the weight
allocated to the resources assigned for task t
j
. Thus,
the objective function is to maximize the total value
by strategically allocating resources to tasks based on
their importance and the associated rewards.
AllDifferent Variant
In this variant, we propose to modify the shading con-
straint by posting AllDifferent constraints in ad-
dition to the table constraints already proposed, as it
is often done in the state-of-the-art (Simonis, 2007)
(Dincbas and Simonis, 1991). In these approaches, an
AllDifferent constraint is added between all over-
lapping pairs of tasks, but this cannot work here, as it
would be less restrictive than the shadow constraint.
Indeed, an AllDifferent constraint would force two
operations t
i
and t
j
to be assigned different parkings.
However, by assigning p
1
and p
2
as parkings for these
tasks, the constraint would be respected but would vi-
olate the shadow constraint if p
1
shaded p
2
.
φ
1
φ
2
φ
3
φ
4
φ
5
Figure 5: Interval graph based on data from Table 1.
Nevertheless, it is possible to use AllDifferent
constraints with an interval graph. Each vertex of the
graph represents a task (the task’s time interval) and is
connected by an edge to another vertex if and only if
there is an overlap between the two intervals. Figure 5
represents an interval graph G for our example, each
vertex represents an interval and there is an edge be-
tween intervals when they intersect. From this graph,
we need to post an AllDifferent constraint for each
maximum clique in the graph.
Definition 5 (Maximum clique). A maximum clique
of G has the greatest number of vertices, which is
maximal for the cardinal. We note C
G
the set of all
maximum cliques.
For the set of maximum cliques, we can post the
constraints: allDifferent({x
i
,∀t
i
∈ c}),∀c ∈ C
G
.
For our example and based on our interval graph
(Figure 5), the maximum cliques are: {φ
1
,φ
2
,φ
4
} and
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
1124
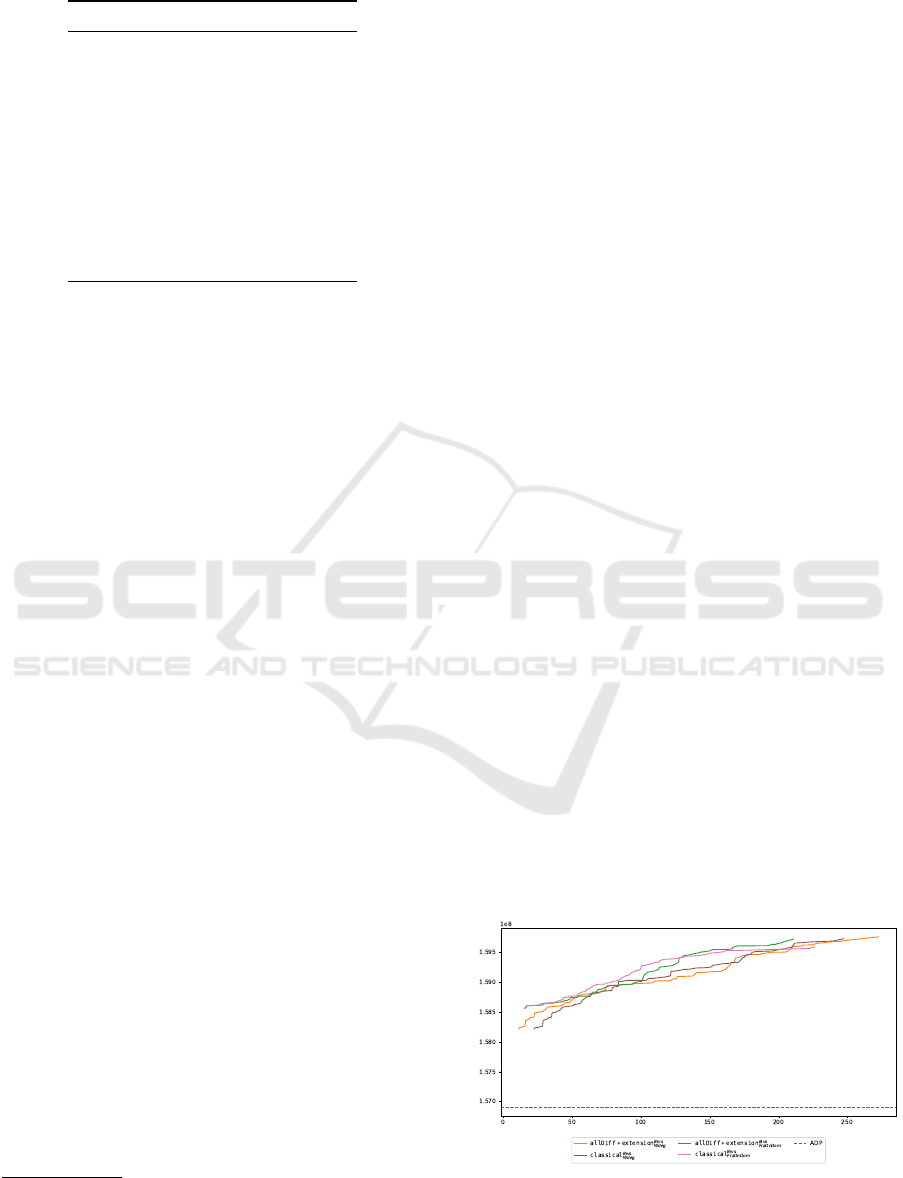
Table 4: General information about the parking planning.
Airport Terminals Week #Rot
CDG T2B T2D WE29 755
CDG T1 T3 WE29 888
CDG T2B T2D WE30 763
CDG T1 T3 WE30 903
CDG T1 T3 WE34 941
CDG T1 T3 WE35 960
CDG T2B T2D WE36 785
CDG T1 T3 WE36 884
CDG T2B T2D WE37 757
CDG T1 T3 WE37 868
CDG T2B T2D WE38 765
CDG T1 WE38 643
{φ
3
,φ
4
,φ
5
}.
4 EXPERIMENTAL RESULTS
This section presents some experimental results of
our modeling presented in the previous sections. In
the context of our experiments, we used instances in
XCSP format (Boussemart et al., 2020) generated with
PyCSP
3
(Lecoutre and Szczepanski, 2020). Table 4
presents some factual information about the differ-
ent plannings used for these experiments. The first
two columns indicate the area of the planning (i.e.,
Airport and Terminals concerning the planning).
The third column gives the date of the planning. Fi-
nally, the last column displays the number of rota-
tions. For each planning, we have considered the two
variants of the problem: classical which contains
the constraints given in Modeling 1 and alldiff in
which we add the allDifferent constraint based on
the maximum cliques (see Section 3).
We use different configurations of the solver ACE
as presented below and the current solution used by
ADP for planning ressources. We call this approach
ADP. ACE-based solvers are named as follows:
(
f
valh
varh
f ∈ {classical,alldiff,notbreak}
varh ∈ {Frba/dom,Wdeg}
valh ∈ {first,Bivs}
)
All solvers have been run on a cluster of comput-
ers equipped with 128 GB of RAM and two quadcore
Intel XEON E5-2637 (3.5 GHz). The time was lim-
ited to 5 minutes and the memory to 64 GB of RAM.
Figure 6 displays the evolution of solver-
determined bounds for some instances, chosen due to
space constraints
1
. This figure uses the x-axis to rep-
resent the elapsed time and the y-axis to indicate the
1
All the experiments data will be made publicly avail-
able if the paper is accepted
value of the bound. The blue dashed line marks the
bounds set by the previous ADP system, which had
an average response time of 7.5 seconds. This system
adopted a strategy of accepting the first solution and
then applying localized optimization. On all tested in-
stances, our approach consistently outperformed the
ADP system in terms of achieving superior bounds.
It is important to note, however, that the attainment
of optimal bounds might occur later in our process.
The figure also shows that the AllDifferent-based
method, labeled as allDiff+extension, closely par-
allels the traditional approach. It should be mentioned
that the time taken to convert each instance into XML
format is not reflected in the timelines shown in this
figure. The exclusion of this compilation time is due
to its inclusion of data processing durations, which are
expected to be absent in the final production version.
In the production environment, this processing will be
conducted prior to utilizing the PyCSP
3
compiler and
will employ a faster programming language.
5 CONCLUSION AND
PERSPECTIVES
In this paper, various models – mainly exploiting ta-
ble constraints – addressing the stand allocation prob-
lem have been introduced. This problem is a funda-
mental aspect of airport operations that has implica-
tions for both efficiency and airline satisfaction. We
put forward two distinct formulations of the problem:
the classical variant which mainly uses extensional
constraints and the allDifferent variant which adds
allDifferent constraints for each maximum clique
of the interval graph formed from overlapping tasks.
Subsequently, we conducted an analysis of different
configurations for the ACE solver and compared the
results with the current ADP method. The value se-
lection heuristic Bivs shows very good performance
and always obtains a better bound than that found by
Figure 6: Evolution of the bound for instance of CDG T1
T3 and planning for week 29.
Parking Scheduling Optimisation at Paris Charles de Gaulle International Airport
1125

ADP. An important aspect of our current approach is
its foundation on open-source tools, which presents
a significant advantage over the former solution that
was commercial. This transition not only offers po-
tential cost savings but also enhances adaptability and
accessibility of the tools, as desired by the direction of
Paris Airports. In the future, we plan to make further
experiments and to study the interest of using multi-
objective constraint solvers like Choco.
REFERENCES
Apt, K. R. (2003). Principles of Constraint Programming.
Cambridge University Press.
Bihr, R. A. (1990). A conceptual solution to the aircraft
gate assignment problem using 0, 1 linear program-
ming. Computers & Industrial Engineering, 19(1-
4):280–284.
Boussemart, F., Hemery, F., Lecoutre, C., and Sais, L.
(2004). Boosting systematic search by weighting con-
straints. pages 146–150.
Boussemart, F., Lecoutre, C., Audemard, G., and Piette,
C. (2020). XCSP3-core: A format for representing
constraint Satisfaction/Optimization problems. CoRR,
abs/2009.00514.
Demeulenaere, J., Hartert, R., Lecoutre, C., Perez, G., Per-
ron, L., R
´
egin, J.-C., and Schaus, P. (2016). Compact-
Table: Efficiently Filtering Table Constraints with Re-
versible Sparse Bit-Sets. In Proceedings of CP’16,
pages 207–223.
Demirovic, E., Chu, G., and Stuckey, P. (2018). Solution-
based phase saving for CP: A value-selection heuristic
to simulate local search behavior in complete solvers.
In Proceedings of CP’18, pages 99–108.
Diepen, G., Akker, J., Hoogeveen, J., and Smeltink, J.
(2007). Using column generation for gate planning
at Amsterdam Airport Schiphol.
Dincbas, M. and Simonis, H. (1991). APACHE - A con-
straint based, automated stand allocation system. Au-
tomated Stand Allocation System Proc. Of Advanced
Software Technology in Air Transport (ASTAIR’91)
Royal Aeronautical Society, pages 267–282.
Dorndorf, U., Drexl, A., Nikulin, Y., and Pesch, E. (2007).
Flight gate scheduling: State-of-the-art and recent de-
velopments. Omega, 35(3):326–334.
Dorndorf, U., Jaehn, F., and Pesch, E. (2008). Modelling
Robust Flight-Gate Scheduling as a Clique Partition-
ing Problem. Transportation Science, 42(3):292–301.
Dorndorf, U., Jaehn, F., and Pesch, E. (2012). Flight gate
scheduling with respect to a reference schedule. An-
nals of Operations Research, 194(1):177–187.
Fages, J.-G. and Prud’Homme, C. (2017). Making the First
Solution Good! In ICTAI 2017, pages 1073–1077,
Boston, MA. IEEE.
Gu
´
epet, J., Acuna-Agost, R., Briant, O., and Gayon, J.
(2015). Exact and heuristic approaches to the airport
stand allocation problem. European Journal of Oper-
ational Research, 246(2):597–608.
Lecoutre, C. (2009). Constraint Networks: Techniques and
Algorithms. ISTE/Wiley.
Lecoutre, C. (2011). STR2: Optimized Simple Tabular Re-
duction for Table Constraints. Constraints : an inter-
national journal, 16(4):341–371.
Lecoutre, C. (2023). ACE, a generic constraint solver.
CoRR, abs/2302.05405.
Lecoutre, C., Likitvivatanavong, C., and Yap, R. (2015).
STR3: A path-optimal filtering algorithm for table
constraints. Artificial Intelligence, 220:1–27.
Lecoutre, C. and Szczepanski, N. (2020). PyCSP3: Mod-
eling combinatorial constrained problems in Python.
CoRR, abs/2009.00326.
Li, H., Yin, M., and Li, Z. (2021). Failure Based Vari-
able Ordering Heuristics for Solving CSPs. In Michel,
L. D., editor, CP 21, volume 210, pages 9:1–9:10.
Lim, A., Rodrigues, B., and Zhu, Y. (2005). Airport Gate
Scheduling with Time Windows. Artificial intelli-
gence review, 24(1):5–31.
Mackworth, A. K. (1977). Consistency in networks of rela-
tions. Artificial Intelligence, 8(1):99–118.
Mangoubi, R. S. and Mathaisel, D. F. X. (1985). Optimizing
Gate Assignments at Airport Terminals. Transporta-
tion Science, 19(2):173–188.
Prem Kumar, V. and Bierlaire, M. (2014). Multi-objective
airport gate assignment problem in planning and
operations. Journal of Advanced Transportation,
48(7):902–926.
Prud’homme, C., Fages, J.-G., and Lorca, X. (2016).
Choco-solver, TASC, INRIA Rennes, LINA, Cosling
S.A.
Rossi, F., van Beek, P., and Walsh, T., editors (2006). Hand-
book of Constraint Programming. Elsevier.
Simonis, H. (2007). Models for global constraint ap-
plications. Constraints : an international journal,
12(1):63–92.
Vanderstraeten, G. and Bergeron, M. (1988). Automatic as-
signment of aircraft to gates at a terminal. Computers
& Industrial Engineering, 14(1):15–25.
Verhaeghe, H., Lecoutre, C., and Schaus, P. (2017). Extend-
ing Compact-Table to Negative and Short Tables. In
Proceedings of AAAI’17, pages 3951–3957.
Vion, J. and Piechowiak, S. (2017). Une simple heuristique
pour rapprocher DFS et LNS pour les COP. In Pro-
ceedings of JFPC’17, pages 39–45.
Yan, S., Shieh, C.-Y., and Chen, M. (2002). A simu-
lation framework for evaluating airport gate assign-
ments. Transportation Research Part A: Policy and
Practice, 36(10):885–898.
Yan, S. and Tang, C.-H. (2007). A heuristic approach
for airport gate assignments for stochastic flight de-
lays. European Journal of Operational Research,
180(2):547–567.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
1126
