
RoomKey: Extracting a Volatile Key with Information from the Local
WiFi Environment Reconstructable Within a Designated Area
Philipp Jakubeit
1 a
, Andreas Peter
1,2 b
and Maarten van Steen
1 c
1
University of Twente, Drienerlolaan 5, 7522 NB Enschede, The Netherlands
2
Carl von Ossietzky Universit
¨
at Oldenburg, Ammerl
¨
ander Heerstraße 114-118, 26129 Oldenburg, Germany
Keywords:
Fuzzy Extraction from WiFi Data, Volatile Key Extraction, Location-Based Authentication Factor.
Abstract:
We present a WiFi signal-based, volatile key extraction system called RoomKey. We derive a room’s key by
creating a deterministic key from the ever-changing WiFi environment and investigating the extraction capa-
bilities of a designated area. RoomKey uses wireless beacon frames as a component, which we combine with
a strong random key to generate and reconstruct the same volatile key in the room. We provide an exemplary
use case using RoomKeyas an authentication factor using the location-specific WiFi environment as an authen-
tication claim. We identified and solved two problems in using location as an authentication factor: location
being sensitive to privacy and the location of a user constantly changing. We mitigate privacy concerns by
recognizing a particular location without the need to localize its precise geographical coordinates. To over-
come the problem of location change, we restrict locations to work environments for laptop usage and allow
a per-location-predetermined, designated area (e.g., a room). With the concept RoomKey, we demonstrate the
potential of including environmental WiFi measurements for volatile key extraction and show the possibility
of creating location-aware and privacy-preserving authentication systems for continuous authentication and
adaptive security measures.
1 INTRODUCTION
Volatile key extraction describes a concept in which a
key is not stored but reconstructed ‘on the fly’ when
required. The main benefit of a volatile key is that the
key is not stored and, therefore, cannot be extracted
from any adversary. The main drawback is that the
measurement used to create the key must be available
and sufficiently stable for key reconstruction. Exam-
ples used for volatile key extraction are biometrics
(Jagadeesan et al., 2010) and physically unclonable
functions, PUFs (Schrijen and Van Der Leest, 2012).
In this work, we use wireless data sent from WiFi
access points as a component in building a volatile,
location-specific key.
The challenge of volatile key extraction is that a
key must be deterministic and identical during the ini-
tialization of the system and during the reconstruc-
tion. Due to the instability of WiFi environments,
this requirement introduces a fundamental problem
for the use of WiFi measurements for volatile key ex-
traction. In this work, we show that minor variations
a
https://orcid.org/0000-0001-6216-6100
b
https://orcid.org/0000-0003-2929-5001
c
https://orcid.org/0000-0002-5113-2746
of the device positioning of a couple of decimeters
change the WiFi measurements considerably. We aim
to overcome this challenge and create a volatile key
from WiFi measurements in a designated area (e.g.,
a room). To do so, we distinguish two phases, the
generation phase and the reconstruction phase. To de-
rive a deterministic and exact matching key, biomet-
rics and PUF research use a concept known to the lit-
erature as fuzzy extractors (Dodis et al., 2004). We
make use of this concept for RoomKey.
Creating an identical key from WiFi measure-
ments during the generation phase and the reconstruc-
tion phase is possible (Jakubeit et al., 2022). How-
ever, they assume that the sensor (the measuring de-
vice) is spatially fixed, which considerably limits their
sensor adaptability. In contrast, we want to realize key
extraction from a designated area. We achieve this by
conducting measurements at various locations within
the respective room during the generation phase, and
we succeeded in reproducing the same key during
the reconstruction phase from any location within the
room. Additionally, we consider off-site locations in
the proximity of the room from which reconstruction
must not be possible. If these measurements from off-
site locations are used as negative examples during
558
Jakubeit, P., Peter, A. and van Steen, M.
RoomKey: Extracting a Volatile Key with Information from the Local WiFi Environment Reconstructable Within a Designated Area.
DOI: 10.5220/0012437500003648
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 10th International Conference on Information Systems Security and Privacy (ICISSP 2024), pages 558-569
ISBN: 978-989-758-683-5; ISSN: 2184-4356
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

the generation phase, we obtain an average success
rate for the reconstruction within the room above 91%
while reducing reconstruction successes from the off-
site locations, which should not be able to reconstruct,
to at most half a percent.
One application of RoomKey is to use the key
as an authentication factor in a multi-factor authen-
tication (MFA) system. In an MFA system, location
recognition has the potential to establish a more reli-
able way to verify user identities. The whereabouts
of a user add an additional validation layer. A user’s
consistent position across multiple authentication re-
quests at a specific, access-controlled location pro-
vides strong evidence for the system that it deals with
the valid user. For example, if the system knows a
login attempt comes from the user’s office, it is more
likely that the entity trying to log in is indeed the user
working at this office. An added benefit of location as
an authentication factor is that it is seamless in itself,
as it does not require user interaction.
In this paper, we present RoomKey a system to
derive a volatile key in a designated area, i.e. a room.
We use fuzzy extractors to transform WiFi data from
on-site WiFi measurements into a secure and consis-
tent representation, which we harden by also consid-
ering off-site WiFi measurements. Through extensive
experimentation and evaluation, we demonstrate the
effectiveness and feasibility of our proposed system.
Our main contributions are as follows.
• We conceptualize and implement a system to con-
vert WiFi measurements of a designated area to a
volatile key such that the exact key can be recon-
structed later from within the same area.
• We distinguish and discuss parameters that can be
tuned to enable reconstruction capabilities inside
the designated area while reducing the reconstruc-
tion capabilities for off-site locations.
• We analyze the options that an adversary has to
successfully impersonate a user.
• We show that RoomKeycan be used to include lo-
cation as an authentication factor in an MFA sys-
tem in a way that preserves privacy.
2 WIFI ENVIRONMENT
The widely used wireless communication protocol
known as WiFi, or the 802.11 WiFi standard (IEEE
Standard, 2007), facilitates device connectivity and
communication within a local network. It offers wire-
less connectivity for a variety of applications. The
802.11 WiFi standard uses beacon frames for net-
work discovery, synchronization, and management
within a WiFi network. Access points (APs) periodi-
cally transmit beacon frames to broadcast information
about the network’s capabilities. By detecting and in-
terpreting these frames, nearby devices can identify
and join the network.
A beacon frame carries various parameters and in-
formation elements that aid in network management.
Their accessibility is dependent on the operating sys-
tem (OS), and for unprivileged users on the Linux OS,
it is limited to the Service Set Identifier (SSID), the
media-access-control (MAC) address, the capability
flags, the mode of the AP, the WiFi-protected-access
(WPA) and robust-security-network (RSN) security
flags, the frequency, and the maximum bit rate. The
complete beacon frame, perceived on Windows or
with privileged access on Linux, contains more fields
that represent the network name, supported data rates,
channel information, security settings, and other net-
work details. A recent work identified 35 stable fields
next to SSID and MAC performing on the Windows
OS (Ciresica, 2023).
2.1 WiFi Landscape and Challenges
The WiFi signal is perceived as ubiquitous and con-
stantly available due to its everyday accessibility and
seamless usage. However, in reality, its availability
is not always seamless. This fluctuating nature of
the WiFi environment becomes evident in Figure 1,
which shows the different availability frequencies of
33 APs observed on the same desk divided into four-
by-four grids in a five-minute scan. We observe that
constant availability of APs is given for four APs,
with the majority of APs not being perceived consis-
tently within and across grid cells. This experiment
highlights the heterogeneous coverage of WiFi on a
small scale. This poses a challenge to extracting the
identical key during the generation and reconstruction
phase.
2.2 Fuzzy WiFi Measurements for Key
Extraction
Separate measurements of physical details, includ-
ing WiFi signals, are prone to temporal changes and
therefore pose an application challenge for key extrac-
tion. Specific criteria must be met for a measurement
to be considered suitable for key extraction. In the
following sections, we outline the prerequisites for a
volatile key and explain how WiFi measurements and
RoomKey. RoomKeysatisfy these requirements.
RoomKey: Extracting a Volatile Key with Information from the Local WiFi Environment Reconstructable Within a Designated Area
559

Desk’s Grid Cell
16
12
8
4
1
1 10 20 30 33
AP Identifier
Figure 1: A heat map of a five-minute measurement show-
ing the frequency of AP occurrences for each AP, grid-cell
pair. The y-axis describes sixteen 25 by 25 centimeter cells
of a physical 1-by-1-meter desk, labeled by numbers. The
x-axis encodes the observed APs from AP-1 to AP-33. Cell
color indicates the frequency of occurrence of the AP dur-
ing five-minute measurements.
Volatile Key Requirements
• Distinctiveness: Measurements should be distinc-
tive enough within the population. This ensures
that the extracted keys are sufficiently different
and contain sufficient entropy.
• Reproducibility: The measurements should be re-
producible, which means that repeated measure-
ments under similar conditions should yield con-
sistent results. This reproducibility is essential for
regenerating the same key from multiple measure-
ments, allowing for successful key reconstruction.
• Robustness: Measurements should be robust to
variations, noise, or distortions that can occur dur-
ing data acquisition. Optimally, the measurements
could handle inherent variations in the captured
data without significantly compromising the ex-
tractability of the key.
• Sensitivity: The measurements should be sensitive
to distinguish correct and incorrect similar mea-
surements.
WiFi Measurements Provisions
• Distinctiveness: The distinctiveness of a loca-
tion in terms of WiFi measurements is determined
by the number of APs available at that location.
Each location has a unique WiFi environment
that makes it suitable or unsuitable for applying
RoomKey. Our proposed system will be able to
detect its applicability and inform the user (and
the system) whether the location’s WiFi environ-
ment is suitable. If two locations’ WiFi measure-
ments have no APs in common, they are distinct.
Independent of the measurement, the key will be
unique per user due to the usage of a device-
specific key component.
• Reproducibility: The reproducibility of a mea-
surement is supported by the stability over five
minutes, as can be seen from the light cells in Fig-
ure 1. As we rely on a non-user-controlled WiFi
infrastructure, there might be changes in the AP
composition. We use error correction to deal with
the fuzziness. Therefore, we can compensate for
additions, removals, or changes in APs up to the
number of errors that we are able to correct. If
the WiFi environment changes more drastically,
reproducibility is not guaranteed. However, such
drastic changes are not to be expected. In a private
environment, we expect that each AP changes less
frequently than annually. In work environments,
the company will be aware of changes in the WiFi
infrastructure that allow for dedicated and an-
nounced resets for key derivation. If the system
allows for a fall-back mechanism and provides
re-enrollment capabilities, such reproducibility is-
sues can be addressed under normal operation.
• Robustness: The robustness of a measurement is
guaranteed by using error correction. There is a
certain robustness against variations, noise, and
distortions. However, due to the measurement of
signals, attacks such as jamming, flooding, or AP
pool poisoning are possible. Their real-world ap-
plicability, though, is questionable. Any of these
attacks can be detected during the reconstruction
phase. A denial-of-service attack is always possi-
ble, especially when dealing with wireless signals.
However, with a fall-back mechanism in place,
none of these attacks could cause problems. What
we assume is a clean WiFi environment during the
generation phase. This is reasonable as it occurs
only at the initialization of the RoomKeysystem
and would require an adversary to actively en-
gage at this moment in time at the specific loca-
tion. However, even when all APs are controlled
by an adversary to know the exact WiFi compo-
sition, our construction with a device-specific key
component makes the room’s key still inaccessi-
ble to the adversary.
• Sensitivity: The measurement’s sensitivity is the
main focus of this work. We analyze how we can
create a key that is extracted from WiFi measure-
ments from the room’s on-site location measure-
ments, while close-by, off-site locations’ mea-
surements are incapable of reconstructing the key.
ICISSP 2024 - 10th International Conference on Information Systems Security and Privacy
560
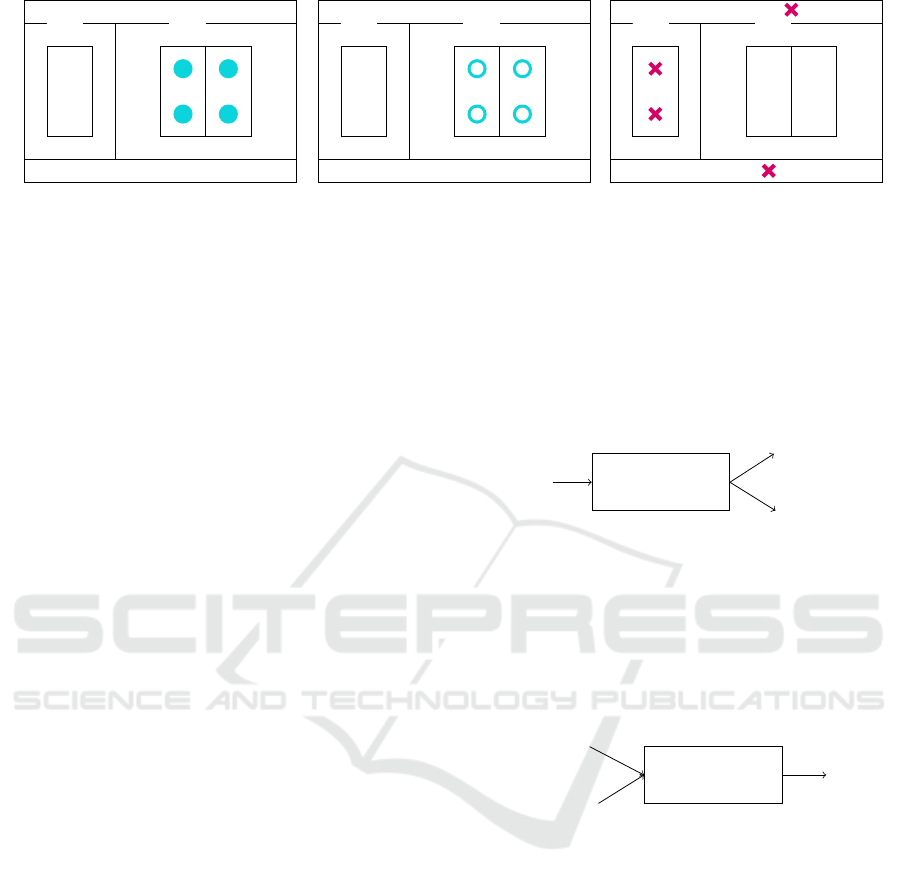
(a) Generation phase scan locations
where measurements must be con-
ducted to construct the key of the
room.
(b) Reconstruction phase scan loca-
tions where a measurement may be
conducted to attempt to reconstruct
the key.
(c) Adversary measurement scan lo-
cations where reconstruction attempts
must not succeed to reconstruct the
key.
Figure 2: Schematic depiction of an office with four workstations, an adjacent office, and the immediate surroundings. In
Figure 2a we depict the four on-site locations where we conduct scans during the generation phase to generate the room’s key.
In Figure 2b we represent the same four on-site locations that can now be individually chosen to attempt a reconstruction. In
Figure 2c we depict four off-site locations in the immediate surroundings, which should not be able to produce a measurement
that allows for successful reconstruction.
3 SYSTEM DESCRIPTION
The goal of RoomKey is to generate and reconstruct
a volatile key of a room based on the measured WiFi
environment within that room. We define a scan S as
a set of measurements within an interval from start to
end in a fixed location L, assuming a hypothetical set
C of all correct measurements, by:
S = {m ∈ C|l(m) = L, t(m) ∈ [start,end]}
Each measurement m of the WiFi environment with
a WiFi sensor s(m) specifies an AP ap(m) measured
at a certain time t(m) at a specific location l(m). Us-
ing this definition of a scan, we distinguish a genera-
tion from a reconstruction phase, and on-site from off-
site measurements. The sensor and location are repre-
sented as strings and the time as a UNIX timestamp,
the AP is represented by the Shake Hash (Bertoni
et al., 2011) of its beacon frame features.
The Generation Phase. In this phase (Figure 2a)
the user conducts first-time measurements to create
the key of a room. Therefore, the user conducts
measurements at various locations within the room
and combines them to extract the room’s key using
RoomKey. As depicted in Figure 3, during the gen-
eration phase r different on-site locations are used to
derive the room’s key and the room’s helper data. This
helper data is stored by the user and can be considered
to be information-theoretically secure (Dodis et al.,
2004) with respect to revealing the original key.
The Reconstruction Phase. In this phase (Figure
2b), a user conducts measurements to reconstruct the
key of a room. The user conducts measurements at
S
L1
.
.
.
S
Lr
Fuzzy extractor
Key
Helper Data
Figure 3: Schematic depiction of the generation phase. A
set of scans is used to extract a room’s key and helper data.
any spot within the room and derives the room’s key
using RoomKey. As depicted in Figure 4 the recon-
struction phase of RoomKey consumes measurements
from one location within the room and the helper data
to produce the room’s key.
S
Helper Data
Fuzzy extractor Key
Figure 4: Schematic depiction of the reconstruction phase.
A scan and the room’s helper data are used to extract the
room’s key.
On-Site and Off-Site. Scans from two different lo-
cations l(m) ̸= l(m
′
) will vary in their AP composition
depending on their spatial proximity. Close-by loca-
tions will have some overlap, whereas locations not in
the WiFi range of one another are distinct. A room is
a physically separated area (e.g. apartments, offices,
classrooms). In Figure 2 we give an example of an
office with four measurement locations on-site. We
include off-site scans (depicted in Figure 2c) later on
in the process to fine-tune a location’s room key (see
Section 5).
RoomKey: Extracting a Volatile Key with Information from the Local WiFi Environment Reconstructable Within a Designated Area
561

3.1 Fuzzy Extractors
Fuzzy extractors as depicted in Figure 3 and Fig-
ure 4 are cryptographic constructions designed to ex-
tract stable and secure cryptographic keys from noisy
or error-prone sources of biometric or environmen-
tal data (e.g.,(Jagadeesan et al., 2010)). The primary
goal of fuzzy extractors is to account for the inherent
variability and inconsistency in measurements to en-
sure reliable and robust key generation. Fuzzy extrac-
tors employ error-correcting codes and secure-sketch
methods to compensate for variations in the input data
up to a certain threshold. By this, a stable inter-
nal baseline measurement can be generated and re-
constructed from sufficiently similar fuzzy measure-
ments. This internal baseline measurement is subse-
quently used as input to a strong extractor. We use
universal hash function families to build such a strong
extractor, which combines the internal baseline with
strong randomness, such that the bits of the resulting
key are uniformly distributed.
3.1.1 Secure Sketch Instantiation: PinSketch
The PinSketch protocol (Dodis et al., 2004) is an in-
stance of a secure sketch, a cryptographic method de-
signed to handle noisy input data and produce con-
sistent output from it. PinSketch works on a vec-
tor representation w of a set W as input and recon-
structs the same set vector w from a noisy input w
′
if w∆w
′
< t. In other words, PinSketch reconstructs
the original input if the symmetric difference between
the two input sets is smaller than the error-correcting
capabilities t. To do so, PinSketch produces a se-
cure sketch SS(w), which is optimal in size and leak-
age: for being able to correct t elements of an n-bit
vector, it has a size and leakage of t × log(n + 1)
bits. PinSketch further stands out by its optimized
nature and its capability to handle varying set sizes
of unordered elements. PinSketch is based on binary
Bose–Chaudhuri–Hocquenghem (BCH) codes, repre-
sented as a [n, k,δ] code. Here, n is the total length of
the BCH code, k is the number of bits in each code
word, and δ is the minimum distance of the code, such
that δ ≥ 2t +1. PinSketch uses only the support vector
v (non-zero elements) of the vector w, the input set’s
vector representation. Therefore, the syndrome vec-
tor syn(v) can be computed in polynomial time with
the parameters δ, the logarithm of n, and the size of
the support vector v. During the recovery phase, if a
vector w
′
of an input set has a weight (i.e., the num-
ber of non-zero elements) that does not exceed t, thus
half of δ − 1, computing the support vector v from its
syndrome vector syn(v) also takes a polynomial time
in the parameters δ and the logarithm of n.
3.1.2 Strong Extractor Instantiation: Universal
Hash Function Family
Universal hash functions are a fundamental crypto-
graphic construction used for various applications, in-
cluding data integrity verification, message authenti-
cation, and strong extractors. We focus on the ap-
proach of Carter and Wegman (Carter and Wegman,
1977) who designed a family of hash functions that
possess strong randomization properties, making it
computationally infeasible for an adversary to predict
the hash value for a given input. This family of hash
functions is known as a universal hash function fam-
ily. In this construction, a random key (a,b) is se-
lected from a predefined key space. This key is used
to initialize the universal hash function family. The
hash function operates by mapping the input data to
a hash value. The key acts as a source of random-
ness, ensuring that different inputs produce distinct
hash values. The formula used by Carter and Weg-
man to define their universal hash function family is:
h
a,b
(x) = ((ax + b) mod p) mod m
In this formula, h
a,b
(x) represents the hash value of
input x using key (a,b), p is a prime number that de-
fines the range of the hash function’s output, and m is
the desired hash size. By varying the values of a and
b within the defined constraints, different hash func-
tions can be generated from the same universal hash
function family, providing the necessary randomiza-
tion properties for secure and efficient data process-
ing. In our scenario, this translates to having two
users at the same location producing different loca-
tion keys with the same measurement x as their keys
(a,b) and (a
′
,b
′
) differ. We fix only the two moduli
m = 2
128
(respectively m = 2
256
) as we aim for keys
of this bit size and p = 2
z
− l as the prime modulus
for tuples of (z,l) ∈ (129, 25),(257,93) depending on
the key size, such that p > m.
3.1.3 Combining Pinsketch and the Universal
Hash function Family
We conduct measurements at r scan locations within
one room and create a shared set of observed APs as
our key set S = {S
L1
,. ..,S
Lr
}. Using n, the number
of APs, H
∞
, the minimum entropy assumed per AP,
the number of bits per code word k, and the desired
key size s, we determine t, the number of APs we are
capable of correcting, per location:
t = ⌊
(n × H
∞
) − s
k
⌋ (1)
We then use PinSketch to derive a secure sketch from
the key set SS(S). In the following, we hash each el-
ement of the key set S using Shake (Bertoni et al.,
ICISSP 2024 - 10th International Conference on Information Systems Security and Privacy
562

2011) and use it as input for the universal hash func-
tion (Carter and Wegman, 1977), which we initialize
with the key (a,b) per location and user. Note that
the sketch SS(S) and the key (a,b) form the device-
specific key component, the helper data, and must be
stored securely on the user’s device.
3.2 Parameters and System Tuning
In this section, we describe the parameters of the
RoomKey system that can be adapted to tune the per-
formance of RoomKey.
Entropy. We focus on two types of entropy. The
maximum entropy H
0
and the minimum entropy H
∞
of APs. We assume a set APs of all APs. With H
0
being the Hartley function (Hartley, 1928) defined as:
H
0
(APs) = log
2
|APs|
Under the assumption of APs being limited by the
unique MAC addresses, we observe that there is at
most H
0
(APs) = 34-bit of entropy in each MAC ad-
dress. The specification for MAC addresses lists 48-
bit (IEEE Standard, 2007). However, due to the con-
struction of a MAC address, the first half represents
the manufacturer, online available lists of manufac-
turer encodings (e.g., (Allan, 2023)) show variation of
about only 10 bits. Therefore, we assume the 24-bit
of the second half of the MAC address plus the 10-bit
of the manufacturer. This maximum entropy provides
an upper bound for the unique information in an AP.
The minimum amount of entropy in an AP, the
min-entropy H
∞
, is crucial for the key extraction. In
the literature, two min-entropies for a WiFi AP are
provided. The authors of (Jakubeit et al., 2022) esti-
mate H
∞
= 9-bit of entropy when having only access
to a restricted feature list. The authors of (Ciresica,
2023) estimate at least H
∞
= 17-bit of entropy us-
ing all stable beacon frame features. To determine
the min-entropy, we assume a discrete random vari-
able X with possible outcomes in the set of APs
S = {x
1
,. ..,x
n
} with each element having the prob-
ability p
i
= Pr(X = x
i
) for i ∈ {1, .. .,n}, the min-
entropy is defined as:
H
∞
(S) = −log
2
max
i
p
i
Where H
∞
(S) describes the AP knowledge an en-
tity has based on a measurement. Under normal oper-
ations, the entity is the user. However, the adversary’s
knowledge determines the entropy available in an AP.
We discuss this in Section 4.
Location-Specific Parameters. We focus on four
parameters regarding the APs observed. First, the du-
ration of a scan S. It is the time we consider to con-
struct a key during the generation phase and is de-
fined as duration = end − start for the start and end
values from a specific scan S. Second, the number
of unique APs observed n = |A|. This number n is
location-dependent, as the WiFi environment varies
per location. The authors of (Jakubeit et al., 2022)
report between one and one hundred observed APs.
Third, the number of APs we are capable of correct-
ing, t. For t we have two ways of determining it. Ei-
ther, we choose the maximum possible as described
in Equation 1 or we choose t by training it based on
the off-site scans observed as described in Equation
2. To do so, we split the off-site measurements into a
training and a test set and use the off-site training set
O to determine t to be one less than the lowest sym-
metrical difference of the off-site training set O and
each observation from the generation phase:
t = min
n
|O∆S|
S ∈ S
o
− 1. (2)
Sensor Details. We focus on two sensor details,
which OS is running, and hence how much informa-
tion we have available from the beacon frames and the
antenna type we use. The OS determines the access
to beacon frames. The difference in min-entropy from
(Jakubeit et al., 2022) and (Ciresica, 2023) is rooted
in the OS and the user’s access rights. Regarding the
choices of antenna, Table 1 shows a real-world com-
parison of the three different antenna types and their
implications for location measurements.
We are considering three types of antennas: PCB
antennas, laptop antennas, external omnidirectional
antennas. Our observation is that the type of sensor
used determines how the WiFi environment is per-
ceived. This can be seen in Table 1. We note that the
use of a laptop or an external antenna increases the
number of perceived access points (APs), and that an
external antenna provides more consistent measure-
ments in terms of the number of APs. However, when
considering the rate of occurrence, we observe that
the three antennas do not vary significantly. This sug-
gests that the choice of antenna does not solve the is-
sue of WiFi signal inconsistencies shown in Figure 1.
Based on the observation that the laptop and the ex-
ternal antenna provide more APs for representing a
location, we have selected an external antenna for our
experiments.
RoomKey: Extracting a Volatile Key with Information from the Local WiFi Environment Reconstructable Within a Designated Area
563

Table 1: Comparison of distributions of the number of measured APs and their rate of occurrence from example measurements
conducted at the same measurement site between three different antennas.
Number of APs
Antenna type min max mean σ
PCB 25.00 33.00 29.32 1.74
Laptop 1.00 70.00 48.74 21.96
Omnidirectional 18.00 71.00 52.83 6.88
4 SECURITY ANALYSIS
In this work, we focus on semi-public spaces: loca-
tions where an on-site and an off-site exist with any-
one being able to access the close by off-site. The
locations we choose to measure are university offices.
Even a stranger could access the perimeter of the of-
fice, while we consider adversaries not to be capable
of entering offices unnoticed.
We assume the user to be cooperative and hon-
est. Both assumptions are reasonable as they are in
the user’s best interest. RoomKey enables a user to
derive a volatile key from measuring the environment
to be used as additional secret information (e.g., in
an authentication context). Therefore, the user stor-
ing the key or the AP set would render a volatile key
obsolete and threaten the user’s authentication claim.
Nonetheless, we expect some users to do this analog
to token forwarding in classical two-factor authenti-
cation systems. However, due to the use of dedicated
software forwarding requires reengineering the inner
workings of the scanning software, or emulating the
WiFi signals in the environment.
Recall that the device-specific key component, the
helper data, contains the secure sketch SS(w) and the
key (a,b). From the secure sketch, we can derive k,
the number of bits per AP representation, and t the
number of APs we are capable of correcting. In the
following, we distinguish whether the adversary pos-
sesses this helper data or not.
Without the Helper Data. An adversary not know-
ing the helper data is required to brute force the key
(a,b). Assuming a and b to be sufficiently strong,
129-bit (257-bit respectively) in our exemplary use
case, it is infeasible for an adversary to guess them
correctly.
With the Helper Data. An adversary knowing the
helper data has knowledge of the coefficients. There-
fore, the success of an attack depends on the amount
of knowledge the adversary has on the user’s WiFi
composition. We assume the adversarial WiFi com-
position to be the set A, the set of APs the adversary
assumes to be in S. We split this adversarial set in
A = A
+
∪ A
−
, with A
+
containing only APs that are
correct, A
+
⊆ S and A
−
containing only APs that are
incorrect, A
−
∩ S =
/
0. We distinguish four levels of
adversary knowledge:
1. No awareness of the WiFi-composition: The ad-
versary has to guess at least n−t correct APs from
2
k
possible choices. Assuming from our exam-
ple k = 34 and the lower assumed min-entropy
of 9-bit, an adversary is required to guess at least
n − t = 15 APs. This number is fixed as we re-
quire at least 16 APs to derive a 128-bit key and
we assume that we have at least 1 AP more to cor-
rect for. Note that this is the minimum of APs re-
quired and error correction applied. This implies
that the probability of a correct reconstruction gets
only worse for the adversary if more APs are con-
sidered. It is infeasible for an adversary to guess
correctly with a probability of:
Pr
h
Reconstruct
|A ∩ S| = n −t
i
=
1
2
k
n−t
e.g., at least
1
2
34
15
= 2
−469.74
2. The adversary knows too few correct APs, |A
+
| <
n −t : The probability of an adversary complet-
ing the set with correct APs not observed opens
the whole search space of 1 in 2
34
per AP. The
probability for an adversary to guess correctly is:
Pr
h
Reconstruct
|A
+
| < n −t
i
=
1
2
k
(n−t)−|A
+
|
Assuming n − t = 15 APs required, this implies a
probability of 2
−34
for (n − t) − |A
+
| = 1. From
two missing APs onwards, we exceed the NIST
recommendations for passwords (NIST, 2021)
with 66.99 bits required. The search space is
increased per missing AP until only one AP is
correct, in which case the adversary would have a
probability of 2
−439.65
to guess correctly.
3. The adversary knows sufficient correct APs, but
the adversarial WiFi-composition set contains too
ICISSP 2024 - 10th International Conference on Information Systems Security and Privacy
564

many incorrect APs, |A
+
| ≥ n − t and |A
−
| > t:
The probability of an adversary to reconstruct cor-
rectly is turned upside down. The adversarial
set A contains sufficient information to attempt
a successful reconstruction, however, A contains
too many incorrect elements for reconstruction,
|A
−
| > t. This implies that the adversary is re-
quired to either choose only the correct APs from
A or to drop incorrect APs from A. The probabil-
ity for an adversary to choose only from A
+
with
choose = A ∩S| = n −t, |A
+
| < n −t,|A
−
| > t is:
Pr
h
Reconstruct by choosing
choose
i
=
1
|A|
(n−t)
The probability of an adversary dropping the in-
correct APs from A
−
for drop = |A ∩ S| ≥ n −
t|,|A
+
| < n −t, |A
−
| > t is:
Pr
h
Reconstruct by dropping
drop
i
=
1
|A|
|A
−
|−t
The adversary would try to estimate the lower
of these two probabilities. Assuming again the
minimum of 15 correct APs being required, and
a scenario of t = 1, the constraints of this case
are satisfied as soon as the adversary observes
at least 17 APs. In that case, the probability of
choosing the correct 15 APs would be 1/
17
15
thus a chance of 1 in 136. Removing the single
incorrect AP would be the better choice in this
setting. As
17
1
equals a chance of 1 in 17.
Generally speaking, dropping incorrect APs is
beneficial if fewer than n − t APs are dropped. If
more APs must be dropped, selecting the correct
n − t APs is more beneficial. The two options to
decrease the chances of success for the adver-
sary are either to decrease t or to increase n or |A|.
4. The adversary knows sufficient correct APs and
the adversarial WiFi-composition set contains
sufficiently few incorrect APs, |A
+
| ≥ n − t and
|A
−
| ≤ t: The probability of an adversary to re-
construct the correct WiFi-composition is 1. For
an adversary holding the helper data, this scenario
implies that the system is secured only by the pro-
tection mechanisms of the device containing the
helper data and the password chosen by the user
(assuming an MFA scenario).
The previous analysis shows that we need to keep
an adversary either in a state of knowing not enough
correct APs or knowing too many incorrect APs. The
safer approach is to reduce knowledge of the cor-
rect APs. This is difficult to implement in the real
world as most WiFi APs are placed in hallways or
hub spaces to guarantee wide coverage. Reducing ad-
versary knowledge of APs can be done in two ways
from our perspective. On the one hand, a site could be
physically access-controlled, and the APs present in
the access-controlled area are placed such that a suffi-
cient number of APs are not measurable from outside
the access-controlled area. On the other hand, WiFi
6 introduced fine time measurement (FTM) in the up-
dated 802.11 standard as described by (Henry, 2021),
which provides the capability of measuring accurate
range. If ranging information is included, such a limit
can be used to control the desired perimeter of WiFi
signals. However, it is more likely that the adversary
observed too many APs when being at a close or even
multiple locations (e.g., in several positions around a
desired location).
Recall that all probabilities described imply that
the adversary got hold of the helper data of the user
(compromised the user’s device and security) and that
the adversary is sufficiently close by, which is achiev-
able only by a very limited set of adversaries: those
adversaries capable of attacking WiFi-capable sensor
in the surroundings and the device of the user re-
motely, and adversaries who physically get hold of
the helper data and can be sufficiently close by to con-
duct WiFi measurements in the proximity of the user’s
measured location.
To prevent an adversary from getting hold of the
user’s device. We can apply methods known to the lit-
erature to safeguard a second factor. Due to the choice
of transparency, storing the helper data in a secure el-
ement or utilizing the trusted execution environment
does not suffice. This also holds for the locking fea-
tures employed by the device. Therefore, when using
a transparent setting having possession of the user’s
device might be sufficient for an adversary. There-
fore, the only sound option is for the user to be edu-
cated and to carry out best practices. As soon as the
device is stolen or lost, the user is asked to use locking
functionality or perform a remote wipe to resolve any
chance that the adversary will use the device masking
as the user.
To prevent an adversary from conducting a sim-
ilar WiFi scan, we can utilize Equation 2 from Sec-
tion 3.2. We can mitigate attacks of a close adversary
by deliberately reducing the reconstruction probabil-
ity for a valid user while reducing the reconstruction
probability for an adversary considerably. Assuming
a system with limited trials for a user request these
probabilities indicate that an adversary would not just
be required to acquire the helper data (extracted from
the user’s device) but also needs to be in the room the
user chose for applying RoomKey.
RoomKey: Extracting a Volatile Key with Information from the Local WiFi Environment Reconstructable Within a Designated Area
565

5 EXPERIMENTS
We conduct measurements for 120 seconds from dif-
ferent offices on different university campuses.
1
We
split the measurement data into a training and test
set of 60 seconds each and repeated the experiment
a hundred times. We present the average probabilities
for a successful reconstruction. Location-wise, we
consider different office sizes in terms of workspaces
(desks) available. First, we consider an office with
one desk only (Office 1). Next, we extend the mea-
surements to more than one position within a room.
We continue with two desks (Office 2), three and four
desks (Office 3 and Office 4), and an office with ten
desks (Office 10). We conducted multiple scans in the
offices, one per desk. Further, we conduct scans in the
surroundings of the office, either in public spaces or
within an adjacent office. We present results for both
choices of min-entropy discussed above, 9-bit and 17-
bit of min-entropy.
5.1 Results
We observe from Table 2 the relevant results for a
min-entropy of assuming 9-bit per AP. Firstly, the
office with a single desk performs the best, which
we expected as the key set S = {S} is effectively
one stationary scan. Further, we observe that longer
measurement times during reconstruction increase the
probability of successful reconstruction. This re-
lationship also holds for intermediate measurement
times like two or five seconds but we will omit these
in this paper to focus on the capabilities of RoomKey.
Furthermore, we can see that deriving longer keys re-
duces the probability of a successful reconstruction
and that the overall probability of a successful recon-
struction is, as we expected, location-dependent. For
an office with only a single desk, we can reconstruct
in 100% of the trials when considering enough sec-
onds during reconstruction. For the office with ten
desks, we got the worst results of being able to recon-
struct the key only in 78% of the trials. Further, we
want to highlight the fact that choosing not the maxi-
mum value for t (Equation 1), but instead training for
a value (Equation 2), always decreases the probability
of successful reconstruction (for locations with multi-
ple positions considered). In general, it is notable that
with the low min-entropy of 9-bit, none of the off-site
locations would be capable of reconstructing success-
fully, which makes sense as we require most APs for
key derivation and have less information left for error
correction.
1
https://gitlab.com/roomkey1/data
We observe from Table 3 the relevant results for a
min-entropy of assuming 17-bit per AP. We get very
good reconstruction capabilities for the smaller of-
fices for the on-site locations but unfortunately also
for some off-site locations. We observe that using
a trained t, applying Equation 2, reduces the prob-
ability of a successful reconstruction as fewer APs
can be corrected for the on-site locations as well as
the off-site locations. Again, increasing the measure-
ment time, improves the probability of a successful
reconstruction. However, compared to the 9-bit min-
entropy case we only require a third of the duration.
The key length again reduces the probability of a suc-
cessful reconstruction, although less compared to the
9-bit min-entropy case. Even with 256-bit keys we get
an average probability of a successful reconstruction
greater than 91% for the on-site location and smaller
0.1% for off-site location.
The results in Table 3 show that we can fine-tune
the performance of the RoomKey system to our needs
and the location modalities. In general, the recon-
struction with the assumption of a min-entropy of 17-
bit performs well for the on-site and unfortunately
also for the off-site locations. We can change that
by reducing the general performance by lowering the
number of APs that can be corrected, and train t based
on the off-site locations. Explicitly tailoring the error
correction capabilities to the environment and the off-
site locations has the disadvantage of decreasing the
reconstruction probabilities from on-site locations as
well. We increase these probabilities of a success-
ful reconstruction by measuring for an increased du-
ration. How long we need to scan is determined by
the information, the min-entropy, in each AP. While
we require ten-second measurements to get decent re-
sults for the 9-bit min-entropy case, three seconds are
sufficient when assuming 17-bit min-entropy to out-
perform these results. This is also congruent with
our expectation, as we require only two APs of 17-
bit min-entropy to correct one AP represented by 34-
bit, while we require four APs when assuming 9-bit
min-entropy per AP.
5.2 Comparison
In our work, we present a system to generate a key
within one designated area, a room. We achieve
this by utilizing WiFi beacon frames and fuzzy ex-
traction. The underlying concept is presented by
(Jakubeit et al., 2023) for static locations. We uti-
lized this concept and showed that WiFi consistency
becomes more relevant with multiple scanning loca-
tions for key extraction compared to a static location.
We extend it by a thorough adversary analysis, result-
ICISSP 2024 - 10th International Conference on Information Systems Security and Privacy
566
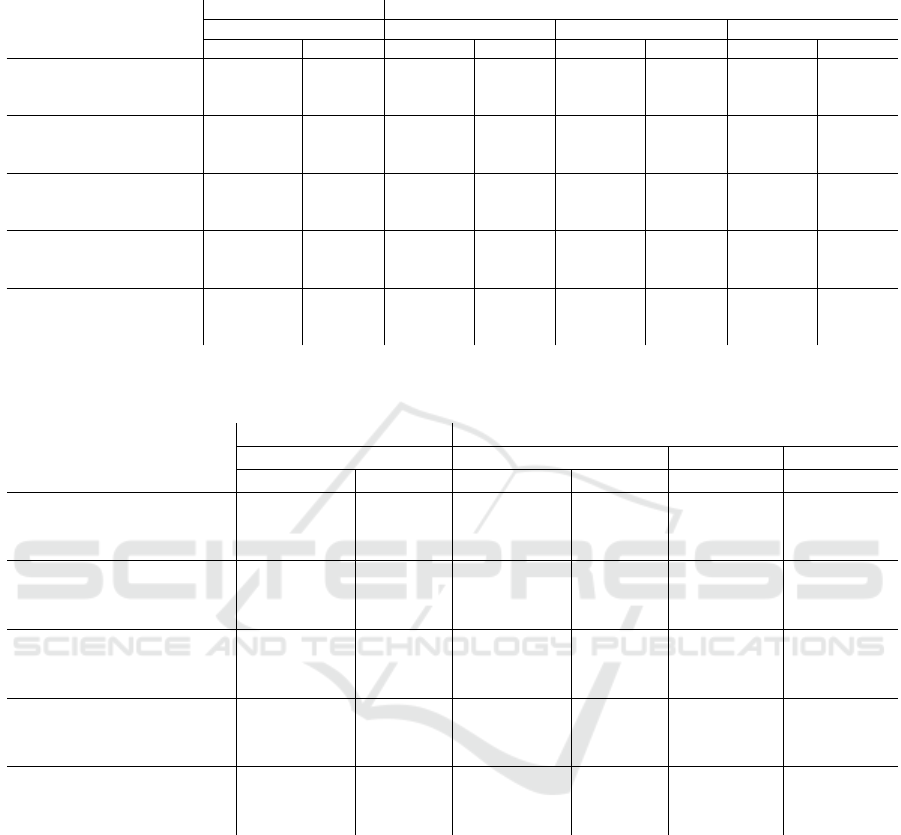
Table 2: The results of 9-bit min-entropy, comparing different office locations, derived key strengths, scan time, and applied
error correction tolerances.
Location
1s for reconstruction 10s for reconstruction
64-bit key 64-bit key 128-bit key 256-bit key
Maximum t Trained t Maximum Trained t Maximum Trained t Maximum Trained t
Office 1 0.62 0.63 1.0 1.0 1.0 1.0 1.0 1.0
Office 1 Hallway 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
Office 1 Adjacent Office 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
Office 2 0.0005 0.0005 0.997 0.998 0.996 0.994 0.962 0.95
Office 2 Hallway 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
Office 2 Adjacent Office 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
Office 3 0.022 0.024 1.0 0.999 1.0 0.999 0.994 0.993
Office 3 Hallway 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
Office 3 Adjacent Office 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
Office 4 0.17 016 0.992 0.98 0.992 0.991 0.98 0.97
Office 4 Hallway 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
Office 4 Adjacent Office 1 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
Office 10 0.0 0.0001 0.78 0.72 0.65 0.64 0.40 0.39
Office 10 Hallway 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
Office 10 Adjacent Office 0.0 0.0 0.0 0.0 0.0 0.0 0.0 0.0
Table 3: The results of 17-bit min-entropy, comparing different office locations, derived key strengths, scan time, and applied
error correction tolerances.
Location
1s for reconstruction 3s for reconstruction
64-bit key 64-bit key 128-bit key 256-bit key
Maximum t Trained t Maximum t Trained t Trained t Trained t
Office 1 0.95 0.94 1.0 1.0 0.999 1.0
Office 1 Hallway 0.0 0.0 0.0 0.0 0.0 0.003
Office 1 Adjacent Office 0.42 0.009 0.41 0.007 0.007 0.0
Office 2 0.79 0.026 0.99 0.78 0.77 0.77
Office 2 Hallway 0.59 0.0 0.59 0.0 0.0 0.0
Office 2 Adjacent Office 0.88 0.0 0.89 0.0 0.0 0.005
Office 3 0.96 0.55 1.0 0.995 0.994 0.996
Office 3 Hallway 0.83 0.005 0.86 0.005 0.003 0.003
Office 3 Adjacent Office 0.35 0.0 0.37 0.0 0.0 0.0
Office 4 0.88 0.35 0.998 0.92 0.92 0.92
Office 4 Hallway 0.0 0.0 0.0 0.0 0.0 0.0
Office 4 Adjacent Office 0.87 0.0 0.86 0.0 0.0 0.0
Office 10 0.24 0.21 0.98 0.925 0.97 0.91
Office 10 Hallway 0.025 0.002 0.02 0.003 0.0008 0.0
Office 10 Adjacent Office 0.0 0.0 0.0 0.0 0.0 0.0
ing in a system tailored to one room. By this, we min-
imize the likelihood of an adversary successfully re-
constructing a user’s room key while allowing a more
seamless experience for the user.
Other works utilize WiFi for indoor navigation
(e.g., (Yang and Shao, 2015)) or for position-based
cryptography (e.g., (Chandran et al., 2009)). What
these solutions have in common, is their dependence
on control of the AP. In contrast, our work is stand-
alone and can adapt to changes in the specification
(e.g., if new stable entropy features are added the en-
tropy estimations can be updated).
Already existing aspects of updates to the WiFi
specification such as channel state information (e.g.,
utilized for indoor positioning (Song et al., 2021)) and
round-time trip (RTT) already utilized to measure the
distance to nearby RTT-capable APs (Mohsen et al.,
2023). However, it remains a task for future research
on how to utilize such udates for key derivation.
In this work, we build upon previous research such
as (Rayani and Changder,2023) by emphasizing the
distinct and measurable attributes of location. While
location is only mentioned in the context of transpar-
ent authentication as a component of behavioral bio-
metrics, we propose considering location as an inde-
pendent factor for transparent authentication, along-
side physiological and behavioral biometrics. By ana-
lyzing the sequence of locations, behavioral biometric
RoomKey: Extracting a Volatile Key with Information from the Local WiFi Environment Reconstructable Within a Designated Area
567

profiles can be derived. However, often the measuring
the context of a user in terms of location suffices. E.g.,
in cases where the office’s room key is used to access
the work email, there is no need for a behavioral pro-
file to determine its validity.
6 DISCUSSION
We evaluated the functionality and feasibility of
RoomKey. In the following, we highlight three dis-
tinguishing elements of RoomKey and propose one
perspective of fine-tuning.
Privacy-Preserving Location Claim. In classical
setups in which a location claim is based on the geolo-
cation of a user, this information is considered person-
ally identifiable information (PII) (European Parlia-
ment and Council, 2016). In the case of RoomKey we
do not care about the localization of a user. Our focus
lies on the recognition of a previously observed envi-
ronment, expressed in measurements of the WiFi bea-
con frames observed. This composition of detected
signals is location-specific. However, we process it in
such a way (hardening it with Shake and the univer-
sal hash function) that it produces a location-specific
key without revealing the location. Due to the use of
the random coefficients to initialize the universal hash
function, the location information differs per entity.
Because neither the system nor an adversary is capa-
ble of deriving any PII from either the AP details or a
location, RoomKey provides a privacy-preserving lo-
cation claim in the form of the location measurement
and the user-specific key.
Authentication Towards Transparency. We see
RoomKey as a way to reduce the ‘human in the loop’
requirement by adding two authentication claims. A
location factor and a possession factor. We base these
claims on location recognition and the strong random
key stored on the user’s device. Our proposed scheme
allows for an authentication mechanism to balance the
need for confirmation. If a check of physical origin
and device access is sufficient, an authentication sys-
tem can make a RoomKey-authentication request at
any time. Our findings show that one up to ten sec-
onds suffices to enable the validation of location per-
sistence. This can be used to either replace traditional
authentication prompts or to introduce another layer
of transparent authentication.
Including Progression in Authentication Systems.
We discussed single locations and their specific WiFi
composition. We included off-site locations only in
our adversary analysis. However, using more than one
location could be a valid use case for behavioral pro-
files. Imagine a scenario where you go to a certain
restaurant on Wednesdays after sports, which you do
after work. In this routine, you have a valid recogni-
tion of your location at the office, at the gym for about
one hour, and at the restaurant about twenty minutes
later. An additional hour later, you pay the bill with-
out requiring confirmation due to your behavioral pro-
file match. In case of an alternation to this routine, the
system could require a “human in the loop” factor.
Fine Tune. We can fine-tune the system further by
considering the rate of occurrence of an AP during the
key generation in S or during the key reconstruction
in S. Considering only APs with a rate of occurrence
of more than 10%, we can tune our worst perform-
ing location, Office 2, to 93% successful reconstruc-
tions. By only considering the most frequently occur-
ring APs each of the examined locations reconstructs
in at least 91%. The minor downside is that the recon-
struction from an off-site location is increased from at
most 0.5% to at most 0.8%.
7 CONCLUSION
We explore how to derive a location-specific key for
location recognition of an area (e.g., a room) in terms
of measured WiFi beacon frame features. One ap-
plication is to enhance authentication systems with
a user’slocation claim. Traditional authentication
methods seldom include location as an authentication
claim. The reason for this is presumably rooted in lo-
cation information being privacy sensitive as well as
temporal and spatial heterogeneity of the users’ loca-
tions. We address both shortcomings of location as an
authentication factor by focusing only on recognition
instead of localization and fixing the environment of
a location to workspaces in which a user is regularly
using the device.
Integrating location recognition into MFA systems
adds the benefit of context-sensitive authentication.
RoomKey assures that the entity that successfully au-
thenticates has access to the helper data and a previ-
ously registered location. This extra knowledge re-
duces the risk of user impersonation or remote at-
tacks.
We emphasize the privacy-preserving nature of
RoomKey. Instead of relying on geolocation ex-
pressed in coordinates or similar, which can raise pri-
vacy concerns, our approach uses fuzzy extractors
to extract a secure key from the WiFi signal com-
ICISSP 2024 - 10th International Conference on Information Systems Security and Privacy
568

position. This ensures that users’ locations remain
protected while still enabling effective authentication
based on the unique features of a location.
We focus on a dedicated area to apply RoomKey.
We consider on-site and off-site locations to balance
the set of measured APs for robust authentication. By
selecting the number of APs considered and addition-
ally training on proximity locations that must not be
able to reconstruct a key, locations are distinct, while
on-site and off-site measurements can be differenti-
ated. We observe an average success rate of 91%
successful reconstructions from an on-site location,
while we have at most 0.5% successful reconstruction
from an off-site location. Our results further show that
smaller rooms can deal with and perform better with
less information assumed (e.g., a minimum entropy
of 9 bits), while larger rooms require more informa-
tion per AP to provide similar performance (a mini-
mum entropy of 17 bits). However, an increased min-
entropy demands the mitigation techniques provided.
In conclusion, the integration of location recogni-
tion into MFA systems through RoomKeyrepresents
an improvement in authentication capabilities and the
use of WiFi beacon frames to derive a key not in
a fixed location but in a designated area. Our ap-
proach adds an employable method to use location in
a privacy-preserving manner while enhancing the user
experience by reducing the number of authentication
prompts. We envision RoomKey to strengthen the ex-
isting authentication infrastructure and open up new
possibilities for seamless authentication.
REFERENCES
Allan, A. (2023). Macvendor. Website. https://gist.github.
com/aallan/b4bb86db86079509e6159810ae9bd3e4.
Bertoni, G., Daemen, J., Peeters, M., and Van Assche, G.
(2011). The keccak sponge function family: Spec-
ifications summary. Ref: http://keccak. noekeon.
org/specs summary. html.
Carter, J. L. and Wegman, M. N. (1977). Universal classes
of hash functions. In Proceedings of the ninth annual
ACM symposium on Theory of computing, pages 106–
112.
Chandran, N., Goyal, V., Moriarty, R., and Ostrovsky, R.
(2009). Position based cryptography. In CRYPTO,
volume 9, pages 391–407. Springer.
Ciresica, V. (2023). Authentication method for windows
os based on location classification using wifi signals.
Master’s thesis, University of Twente.
Dodis, Y., Reyzin, L., and Smith, A. (2004). Fuzzy extrac-
tors: How to generate strong keys from biometrics and
other noisy data. In International conference on the
theory and applications of cryptographic techniques,
pages 523–540. Springer.
European Parliament and Council (2016). Regulation (eu)
2016/679 of the european parliament and of the coun-
cil of 27 april 2016 on the protection of natural per-
sons with regard to the processing of personal data and
on the free movement of such data, and repealing di-
rective 95/46/ec (general data protection regulation).
Accessed: 07.2023.
Hartley, R. V. (1928). Transmission of information 1. Bell
System technical journal, 7(3):535–563.
Henry, J. (2021). Indoor Location: study on the IEEE
802.11 Fine Timing Measurement standard. PhD the-
sis, Ecole nationale sup
´
erieure Mines-T
´
el
´
ecom Atlan-
tique.
IEEE Standard (2007). Wireless lan medium access control
(mac)and physical layer (phy) specifications. https:
//www.iith.ac.in/
∼
tbr/teaching/docs/802.11-2007.pdf.
Jagadeesan, A., Thillaikkarasi, T., and Duraiswamy, K.
(2010). Cryptographic key generation from multiple
biometric modalities: Fusing minutiae with iris fea-
ture. International Journal of Computer Applications,
2(6):16–26.
Jakubeit, P., Peter, A., and van Steen, M. (2022). The
measurable environment as nonintrusive authentica-
tion factor on the example of wifi beacon frames.
In International Workshop on Emerging Technologies
for Authorization and Authentication, pages 48–69.
Springer.
Jakubeit, P., Peter, A., and van Steen, M. (2023). Lockey:
Location-based key extraction from the wifi environ-
ment in the user’s vicinity. In Proceedings of the eigh-
teenth interntation conference on information security
practice and experience.
Mohsen, M., Rizk, H., Yamaguchi, H., and Youssef, M.
(2023). Locfree: Wifi rtt-based device-free indoor lo-
calization system.
NIST (2021). Digital identity guidelines, authentication
and lifecycle management. https://pages.nist.gov/
800-63-3/sp800-63b.html.
Rayani, P. K. and Changder, S. (2023). Continuous user au-
thentication on smartphone via behavioral biometrics:
a survey. In Multimedia Tools and Applications, pages
1633–1667. Springer.
Schrijen, G.-J. and Van Der Leest, V. (2012). Comparative
analysis of sram memories used as puf primitives. In
2012 Design, Automation & Test in Europe Confer-
ence & Exhibition (DATE), pages 1319–1324. IEEE.
Song, Y., Chen, B., Wu, T., Zheng, T., Chen, H., and Wang,
J. (2021). Enhancing packet-level wi-fi device au-
thentication protocol leveraging channel state infor-
mation. Wireless Communications and Mobile Com-
puting, 2021:1–12.
Yang, C. and Shao, H.-R. (2015). Wifi-based indoor posi-
tioning. IEEE Communications Magazine, 53(3):150–
157.
RoomKey: Extracting a Volatile Key with Information from the Local WiFi Environment Reconstructable Within a Designated Area
569
