
BornFS: Feature Selection with Balanced Relevance and Nuisance and
Its Application to Very Large Datasets
Kilho Shin
1 a
, Chris Liu
2
, Katsuyuki Maeda
1
and Hiroaki Ohshima
3 b
1
Computer Centre, Gakushuin University, Mejiro, Tokyo, Japan
2
Deloitte Tohmatsu Cyber LLC., Marunouchi, Tokyo, Japan
3
Graduate School of Information Science, University of Hyogo, Kobe, Hyogo, Japan
Keywords:
Feature Selection, Categorical Data.
Abstract:
In feature selection, we grapple with two primary challenges: devising effective evaluative indices for selected
feature subsets and crafting scalable algorithms rooted in these indices. Our study addresses both. Beyond
assessing the size and class relevance of selected features, we introduce a groundbreaking index, nuisance.
It captures class-uncorrelated information, which can muddy subsequent processes. Our experiments confirm
that a harmonious balance between class relevance and nuisance augments classification accuracy. To this
end, we present the Balance-Optimized Relevance and Nuisance Feature Selection (BornFS) algorithm. It not
only exhibits scalability to handle large datasets but also outperforms traditional methods by achieving better
balance among the introduced indices. Notably, when applied to a dataset of 800,000 Windows executables,
using LCC as a preprocessing filter, BornFS slashes the feature count from 10 million to under 200, maintain-
ing a high accuracy in malware detection. Our findings shine a light on feature selection’s complexities and
pave the way forward.
1 INTRODUCTION
Feature selection is pivotal in machine learning and
gains prominence with increasing data. With big
data introducing myriad features, efficient feature se-
lection is paramount. For example, in bioinformat-
ics, datasets may feature thousands of genes, making
identifying disorder-linked genes a feature selection
challenge. As machine learning progresses, refined
feature selection becomes critical.
While dimensionality reduction is often equated
with feature selection, they are distinct concepts. Di-
mensionality reduction is generally applied to contin-
uous features, crafting new dimensions that encap-
sulate the essence of the original dataset. In con-
trast, feature selection, which has undergone exten-
sive study particularly for categorical features, in-
volves choosing from the existing features.
Deep neural networks are also gaining attention
for their ability to effectively extract features from
data. However, these extracted features are typically
not human-interpretable, contrasting with feature se-
a
https://orcid.org/0000-0002-0425-8485
b
https://orcid.org/0000-0002-9492-2246
lection, which directly identifies important features.
This paper delves into categorical feature selec-
tion, crucial for tasks like pinpointing disease-causing
genes. Categorical feature selection has seen thor-
ough exploration in literature, as demonstrated by
(Almuallim and Dietterich, 1994; Hall, 2000; Yu and
Liu, 2003; Peng et al., 2005; Zhao and Liu, 2007;
Shin et al., 2015).
This paper addresses two primary challenges in
modern categorical feature selection:
1. Feature Evaluation Indices: We’ve introduced ro-
bust indices for assessing feature subset quality.
Apart from the conventional high class relevance
and few feature count indices, a novel low nui-
sance metric is presented. This quantifies non-
class-related information in the feature subset.
2. Algorithmic Innovation with Scalability: We
present BORNFS, an algorithm tailored to bal-
ance the three indices and adeptly process large
datasets.
This paper begins with an overview of categori-
cal feature selection algorithms, introducing the new
nuisance index and an aggregate index for class rel-
evance balance. We conduct two experiments: first,
1100
Shin, K., Liu, C., Maeda, K. and Ohshima, H.
BornFS: Feature Selection with Balanced Relevance and Nuisance and Its Application to Very Large Datasets.
DOI: 10.5220/0012436000003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 3, pages 1100-1107
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
analyzing the balance in compact datasets and then in
16 larger benchmark datasets. Results show a corre-
lation between balance and predictive accuracy, lead-
ing to our new mechanism, BORNFS. We compare its
performance with mRMR and LCC, concluding with
an experiment using BORNFS on a dataset with over
10 million features and 800,000 instances.
2 MATHEMATICAL NOTATIONS
A dataset D is represented as a matrix with n
I
rows
corresponding to instances and n
F
+ 1 columns cor-
responding to features. The rightmost column rep-
resents the class labels of the instances, while the
other columns are denoted as F
1
,...,F
n
F
. We focus
on datasets where all features are categorical, thus,
the value set R(F) for a feature F, including F
i
or the
class featureC, is finite.
In this context, the dataset defines a probability
measure over the sample space Ω
D
= R(F
1
) × · · · ×
R(F
n
F
) × R(C). The empirical probability for a vec-
tor v
v
v ∈ Ω
D
is given by P
D
[F
1
,...,F
n
F
,C = v
v
v] =
n(v
v
v)
n
I
,
where n(v
v
v) denotes the number of occurrences of v
v
v.
Here, both features and the class feature are consid-
ered random variables, allowing the application of
probability-based metrics such as entropy and mutual
information.
3 RELATED WORK
3.1 Relevance, Redundancy, Interaction
Many studies posit the ultimate goal of feature selec-
tion as the identification of the smallest subset of fea-
tures that exhibits the highest class relevance. This
class relevance pertains to the collective correlation
of a feature subset F with class labels. Various mea-
sures, such as mutual information I(F ;C), are used to
quantify this relevance.
To achieve this goal, several algorithms in the lit-
erature, including CFS (Hall, 2000), RELIEF-F (Kira
and Rendell, 1992), and mRMR (Zhao et al., 2019),
capitalize on the concept of internal redundancy. This
concept refers to the shared information among fea-
tures, where reducing redundancy helps decrease the
feature count. For instance, when considering the in-
clusion of a feature F in a feature set F , these al-
gorithms assess the balance between redundancy gain
and relevance gain. These gains can be estimated as
I(F ; F) and I(F ,F;C) − I(F ;C), respectively.
In evaluating I(F ;F), the approximation
I(F ; F) ≈
∑
F
0
∈F
I(F
0
;F) is common, enhancing
time efficiency but potentially missing critical feature
interactions. Advanced methods like INTERACT by
(Zhao and Liu, 2007) and its successors like LCC
(Shin et al., 2011; Shin et al., 2017) have refined
feature selection, considering these interactions for
improved relevance and feature count.
3.2 Advances in Time Efficiency
To select k features that maximize class relevance, ex-
haustive search typically requires O(n
k
F
) time. Algo-
rithms like mRMR, CFS, and RELIEF-F improve this
to O(k
2
n
F
n
I
), effectively balancing relevance and re-
dundancy. Even more efficient, LCC further reduces
the time complexity to O(n
F
n
I
logn
F
), despite incor-
porating feature interaction into the selection process.
In practical terms, LCC is currently the only ad-
vanced feature selection algorithm known to scale ef-
fectively to big data, as evidenced by its performance
on the DOROTHEA dataset of 100,000 features and
800 instances, where it operates significantly faster
than mRMR in Weka, completing the task in under
300 milliseconds versus more than 3,500 seconds.
3.3 The Algorithm of LCC
To achieve both theoretical and practical time effi-
ciency while grounding on the indices introduced, we
develop BORNFS, building upon the algorithmic effi-
ciency and foundation established by LCC.
Input: A dataset D described by F
D
∪ {C}; and a
threshold t ∈ [0,1].
Output: A minimal feature subset F ⊆ F
D
with
1 − Br(F ;C) ≥ t (1 − Br(F
D
;C)).
1 Number the features of F
D
so that F
1
,... , F
n
F
are in
an increasing order of SU(F
i
;C).;
2 F =
/
0 and i = 1.;
3 while i ≤ n
F
do
4 Let j = min{ j ∈ [i, n
F
] | 1 − Br(F ∪ F
D
[ j +
1,n
F
];C) < t (1 − Br(F
D
;C))}.;
5 F = F
D
∪ { j} and i = j + 1. ;
6 end
7 return F .
Algorithm 1: LCC.
Algorithm 1 outlines the LCC algorithm. To deter-
mine the class relevance, it utilizes the complement of
the Bayesian risk:
1 − Br(F ;C) =
∑
v
v
v∈R(F )
max
c∈R(C)
Pr[C = c | F = v
v
v].
Exploiting the relevance measure’s monotonicity, that
is, 1 − Br(F ;C) ≥ 1 − Br(G;C) for F ⊃ G, LCC em-
ploys binary search to implements Line 4.
BornFS: Feature Selection with Balanced Relevance and Nuisance and Its Application to Very Large Datasets
1101

The sorting step (Line 1) utilizes the normalized
mutual information metric SU(F;C) =
2·I(F;C)
H(F)+H(C)
. In-
troduced empirically to boost classification accuracy,
as suggested in (Zhao and Liu, 2007), this sorting
method has proven effective. Features ranked earlier
by this metric are more likely to be eliminated in Line
4, thus optimizing the selection process and enhanc-
ing the overall accuracy of the algorithm.
4 THE THIRD INDEX –
NUISANCE
4.1 Definition
In addition to established indices such as class rele-
vance and feature count, we introduce an additional
criterion: nuisance.
The term nuisance denotes the portion of informa-
tion within a feature subset unrelated to class labels.
As the primary goal of feature selection is to enhance
the representational ability of features for class labels,
any data not contributing to this objective is consid-
ered redundant, potentially leading to inaccurate pre-
dictions. Nuisance misleads classifiers by introducing
irrelevant information. It can be quantified in various
ways, including:
• Conditional Entropy: H(F | C) = H(F )−I(F ;C)
• Inverted Bayesian Risk Br(C;F ):
• Ratio:
H(F )
I(F ;C)
.
4.2 Balancing Relevance and Nuisance
To effectively balance class relevance and nuisance,
a robust measure is necessary. Our study utilizes the
harmonic mean of
I(F ;C)
I(F
D
;C)
for normalized class rele-
vance and
I(F ;C)
H(F )
as the reciprocal of nuisance’s ratio
representation as the primary metric. This metric is
particularly chosen for its sensitivity to both relevance
and nuisance, ensuring that it approaches zero in cases
of low relevance or high nuisance. It is formulated as:
µ
H
(F ;C) =
2 · I(F ;C)
I(F
D
;C) + H(F )
. (1)
However, our methodology is flexible and not lim-
ited to this specific metric alone. Alternative methods
to quantify nuisance and various functions to evaluate
the balance between relevance and nuisance are also
viable and can be integrated into our approach, allow-
ing for adaptability and optimization according to dif-
ferent dataset characteristics and analytical needs.
The selected metric, µ
H
(F ;C), has the following
properties:
1. µ
H
(F ;C) = 0 is equivalent to I(F ;C) = 0;
2. µ
H
(F ;C) = 1 implies I(F ;C) = I(F
D
;C) =
H(F );
3. When I(F
D
;C) = H(C), µ
H
(F ;C) coincides with
SU(F ;C).
5 EFFICACY VALIDATION OF
THE PROPOSED INDICES
We evaluated three indices, particularly the balance
index µ
H
, across two experiments linking µ
H
scores to
predictive accuracy. The first explored all feature sub-
sets in compact datasets, while the second assessed
sampled subsets in larger benchmark datasets.
5.1 Data Preparation
Before experiments, datasets underwent discretiza-
tion into ten equal parts and binarization, resulting in
binary features, except for class variables, using one-
hot encoding.
5.2 Evaluation of Predictive Accuracy
To evaluate the classification power of each feature
subset, we perform five-fold cross-validation on the
narrowed dataset using LightGBM (LGBM) and Mul-
tiple Layer Perceptron (MLP) classifiers.
5.2.1 Experiment 1: Exhaustive Investigation
with Small Datasets
For this experiment, we work with the three MONKS
datasets. While each of these datasets contains the
same 432 instances and is described by six features,
their annotations differ, as outlined in (Blake and
Merz, 1998). After binarization, these datasets are
represented by 17 binary features alongside a class
variable.
For each binarized MONKS dataset, we examine
all 2
17
− 1 non-empty feature subsets. These subsets
are evaluated based on their µ
H
scores and AUC-ROC
values using the LGBM and MLP classifiers.
Figure 1 illustrates the correlation between the
µ
H
(F ;C) scores (represented on the x-axis) and the
AUC-ROC scores (on the y-axis) for feature subsets.
Given that 2
17
− 1 represents a considerably large
number, the plot is limited to those F with the highest
I(F ;C). The figure demonstrates that as the µ
H
(F ;C)
values increase, the AUC-ROC scores increasingly
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
1102
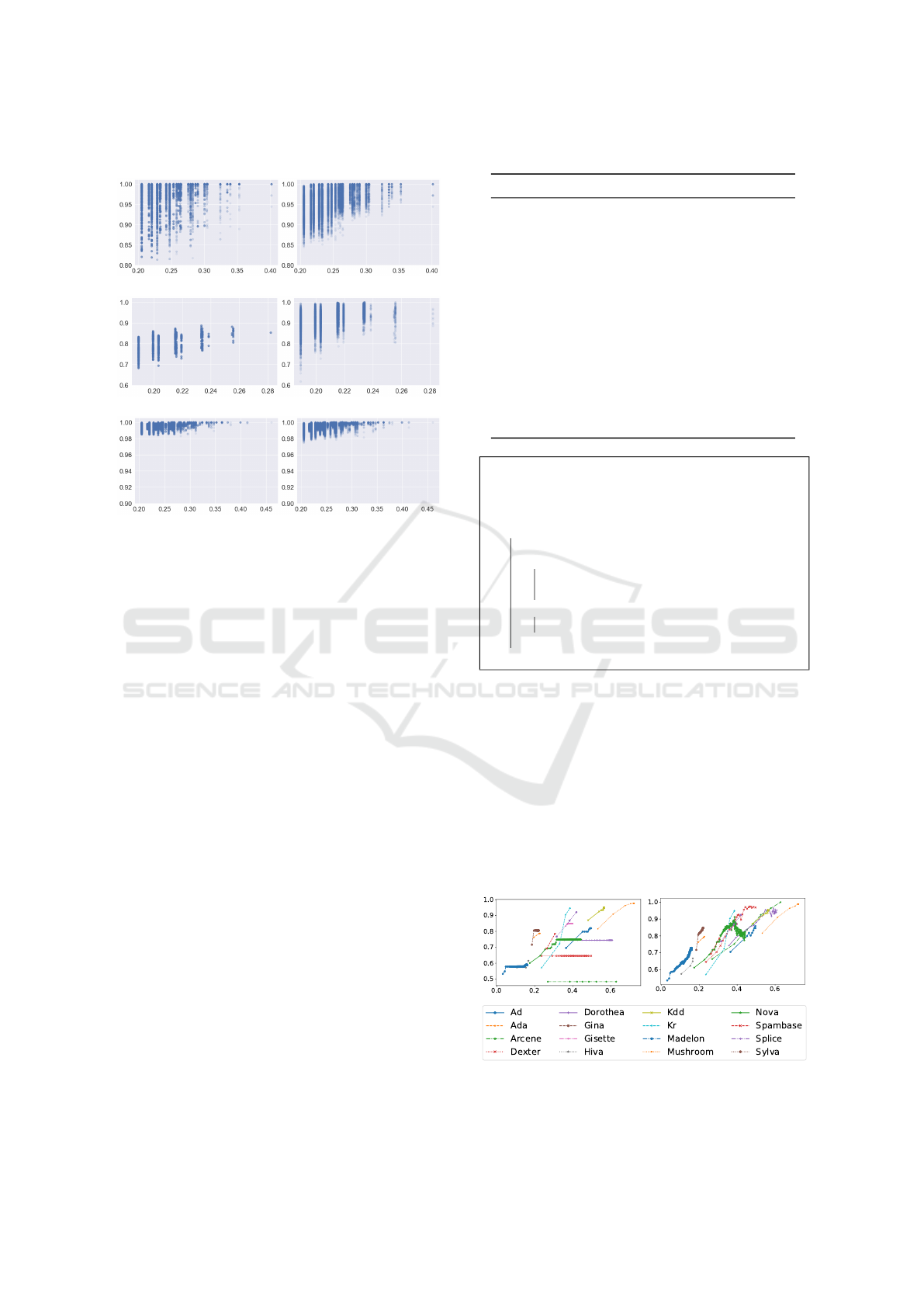
LGBM MLP
MONKS 1 (I(F ;C) = 1.0)
MONKS 2 (I(F ;C) ≥ 0.91)
MONKS 3 (I(F ;C) ≥ 0.99)
Figure 1: Relation between µ
H
(x axis) and AUC-ROC (y
axis) for the MONKS datasets.
converge within narrower and elevated ranges. This
observation implies a substantial probability of attain-
ing feature subsets with enhanced predictive perfor-
mance by using high µ
H
(F ;C) scores as a criterion
for selection.
5.2.2 Experiment 2: Investigation with Larger
Datasets
In our second experiment, we examine 15 larger
datasets listed in Table 1. Ten were part of fea-
ture selection challenges at NIPS 2003 (NIPS, 2003)
and WCCI 2006 (WCCI, 2006). One comes from
the KDD 1999 network intrusion detection chal-
lenge (KDD, 1999), while others are from the UCI
repository (Blake and Merz, 1998).
Given the larger number of features in these
datasets, an exhaustive evaluation similar to our first
experiment isn’t viable. To pinpoint succinct feature
subsets, F , with prominent µ
H
scores, we turn to a
hill-climbing sampling method, as outlined in Algo-
rithm 2. This approach yields subsets F
1
⊂ ··· ⊂ F
n
for each dataset, where the size of subset F
i
is i and it
meets the condition µ
H
(F
i
;C) < µ
H
(F
i+1
;C).
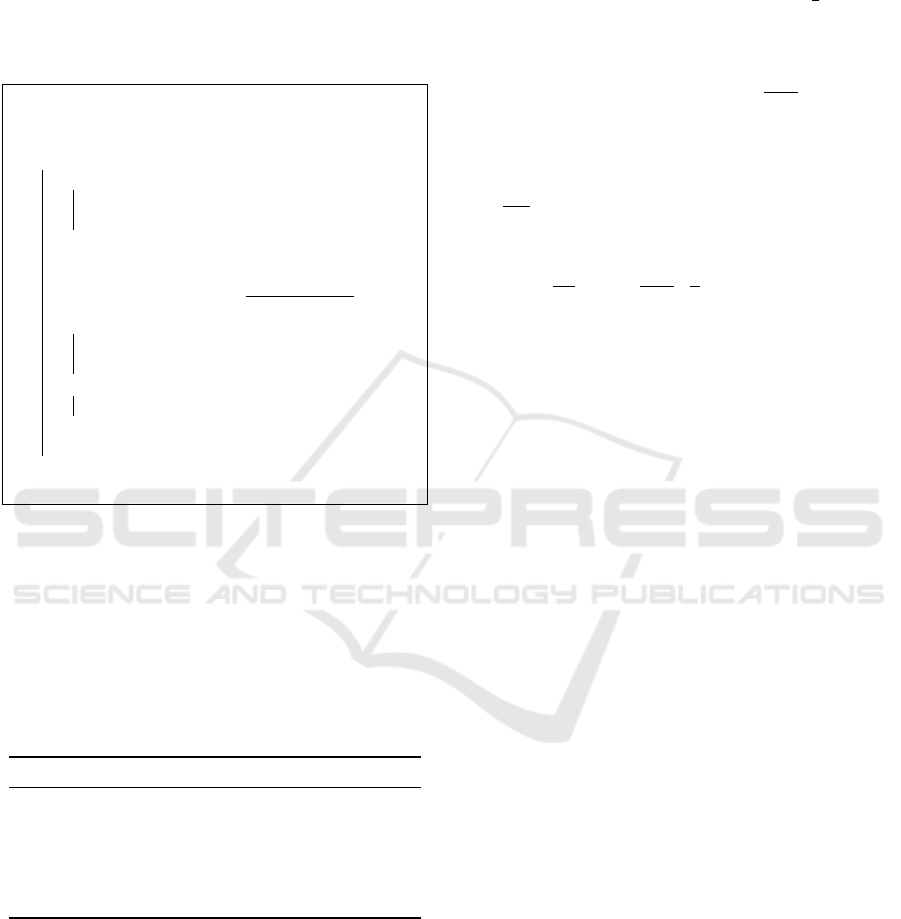
Figure 2 showcases the relationship between
the AUC-ROC scores (on the y-axis) and the µ
H
scores (plotted on the x-axis) for each feature sub-
set F
i
produced by Algorithm 2. Excluding two
exceptions-—DEXTER with LGBM and DOROTHEA
with MLP—-there is a discernible positive correlation
between the predictive performance of the classifiers
Table 1: Attributes of datasets.
Dataset #F #BF #I Ref.
AD 1,559 3,137 3,279 (Blake and Merz, 1998)
ADA 49 134 4,147 (WCCI, 2006)
ARCENE 10,001 83,950 100 (NIPS, 2003)
DEXTER 20,001 35,924 300 (NIPS, 2003)
DOROTHEA 100,001 100,001 800 (NIPS, 2003)
GINA 971 9,683 3,153 (WCCI, 2006)
GISETTE 5,001 39,809 6,000 (NIPS, 2003)
HIVA 1,618 3,235 3,845 (WCCI, 2006)
KDD 42 346 25,192 (KDD, 1999)
KR 37 74 3,196 (Blake and Merz, 1998)
MADELON 501 4,972 2,000 (NIPS, 2003)
MUSHROOM 23 114 8,124 (Blake and Merz, 1998)
NOVA 16,970 29,368 1,754 (WCCI, 2006)
SPAMBASE 58 134 4,601 (Blake and Merz, 1998)
SYLVA 217 746 13,086 (WCCI, 2006)
Input: A dataset described by a feature set F
D
and
C.
Output: Feature subsets F
1
⊂ ·· · ⊂ F
n
with |F
i
| = i.
1 Let n = 0 and F
0
=
/
0;
2 while true do
3 Let F ∈ argmax µ
H
(F
n
,F;C);
4 if µ
H
(F
n
,F;C) > µ
H
(F
n
;C) then
5 Let n = n + 1;
6 F
n
= F
n−1
∪ {F};
7 else
8 return F
1
,. . . , F
n
9 end
10 end
Algorithm 2: A hill-climbing sampling.
and the µ
H
scores of their corresponding feature sub-
sets. Especially with MLP, this positive correlation is
strongly evident across all the datasets.
5.3 Conclusions from the Experiments
Both experiments affirm the effectiveness of nuisance
in feature selection and the metric µ
H
for capturing
feature set nature.
LGBM
MLP
Figure 2: Relation between µ
H
(x axis) and AUC-ROC (y
axis) for larger datasets.
BornFS: Feature Selection with Balanced Relevance and Nuisance and Its Application to Very Large Datasets
1103

6 A NEW ALGORITHM – BORNFS
We introduce the first categorical feature selection al-
gorithm assessing nuisance, class relevance, and fea-
ture count, named Balance-Optimized Relevance and
Nuisance Feature Selection (BORNFS). It’s highly
time-efficient, scalable to large datasets.
6.1 Design Policies of BORNFS
Class relevance ought to be given the highest priority
among the three indices. This prioritization ensures
that the most significant factor influencing the algo-
rithm’s effectiveness is appropriately emphasized.
Specifically, I(F ;C) gauges the information cru-
cial for accurate understanding and effective learn-
ing. A feature set’s significance is compromised if
its class relevance is low, regardless of its size or nui-
sance level.
To manage class relevance, we introduce t
t
t-
abundance and t
t
t-minimality, guided by a threshold
t ∈ (0, 1]. Our algorithm seeks to yield feature sub-
sets adhering to these criteria.
Definition 1. Given a dataset D described by a fea-
ture set F
D
and a threshold t ∈ (0, 1], the criteria
of t-abundance and t-minimality for a feature subset
F ⊆ F
D
are defined as:
1. t
t
t-abundance:
I(F ;C)
I(F
D
;C)
≥ t ;
2. t
t
t-minimality:
I(G;C)
I(F
D
;C)
< t for any G $ F .
The fulfillment of t-abundance ensures that the
feature subset possesses adequate relevance, while t-
minimality reduces the feature count. Therefore, our
revised objective is to develop a fast algorithm that
selects feature subsets which are both t-abundant and
t-minimal, and that also exhibit low nuisance.
6.2 The Key Idea
In developing BORNFS, we adapted the LCC frame-
work for its significant speed and ability to scale to
very large datasets. The key feature contributing to
the efficiency of LCC is its iterative binary search rou-
tine, which selects a single feature per iteration. For
BORNFS, we customized it to be guided by the t-
abundance principle.
Moreover, before executing each binary search,
BORNFS arranges the features within the search
range based on an estimation of potential gains in
relevance and nuisance. To optimize the balance,
BORNFS leverages the property of the LCC search
framework where features positioned later are more
likely to be selected.
When using F to denote the set of features se-
lected prior to the next search, we express the poten-
tial gain in relevance as ∆
r
(F; F ) and the potential
gain in nuisance as ∆
n
(F;F ) as follows:
∆
r
(F;F ) = I(F , F;C) − I(F ;C); (2)
∆
n
(F;F ) = H(F) − I(F; F ,C). (3)
The algorithm is designed to swiftly update these val-
ues following the addition of a new feature to F .
While the introduction of this sorting procedure
causes computational overhead, it does not affect the
overall asymptotic time complexity, as detailed in
(Section 7.1).
6.3 Algorithm Description
Algorithm 3 describes BORNFS.
6.3.1 Fundamental Structure
The algorithm iteratively selects features, choosing
one from a search range during each cycle. Let’s de-
fine:
• F as the set of previously chosen features;
• The current search range as F
s
,...,F
n
F
.
When the algorithm calculates r
i
=
I(F ,F
i+1
,...,F
n
F
;C)
I(F
D
;C)
for i ∈ [s, n
F
], if r
i
≥ t, it considers features F
s
,...,F
i
as insignificant according to t-abundance.
As the ratio decreases with increasing i, a binary
search efficiently find the value:
s
∗
= min
i ∈ [s, n
F
]
I(F , F
i+1
,...,F
n
F
;C)
I(F
D
;C)
< t
.
Upon finding s
∗
, BORNFS includes F
s
∗
in F and
shifts the search range to F
s
∗
+1
,...,n
F
.
6.3.2 Sorting of Features in a Search Range
In the iterative process of identifying s
∗
, features posi-
tioned earlier in the search range are more likely to be
omitted, as indicated by previous studies (Zhao and
Liu, 2007; Shin et al., 2017). Leveraging this insight,
BORNFS sorts features based on their potential im-
pact on the balance between relevance and nuisance.
To assess the impact, BORNFS employs one of the
following:
Ratio: Γ
R
(F;F ) =
∆
r
(F;F )
∆
n
(F; F )
;
Harmonic mean: Γ
H
(F;F ) =
2(I(F ;C) + ∆
r
(F; F ))
I(F
D
;C) + H(F )+ ∆
r
(F; F ) + ∆
n
(F; F )
.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
1104
Furthermore, the execution speed of BORNFS is
impacted by the frequent sorting process using either
Γ
R
or Γ
H
. To mitigate this, BORNFS introduces a
hop parameter, denoted as h, which dictates that sort-
ing occurs every h iterations. Essentially, LCC can be
considered a variant of BORNFS with an infinite hop
value (h = ∞).
Input: A dataset described by F
D
∪ {C}; t ∈ (0, 1];
one of Γ
R
and Γ
H
; and a hop h ∈ N.
Output: A t-abundant and t-minimal F ⊆ F
D
.
1 Let F =
/
0. Let s = 1 and c = 0. while s ≤ n
F
do
2 if c mod h ≡ 0 then
3 Renumber F
s
,. . . , F
n
F
in an increasing order
of Γ(F; F );
4 else
5 end
6 if ∃s
∗
= min
n
i ∈ [s, n
F
]
I(F ,F
i+1
,...,F
n
F
;C)
I(F
D
;C)
< t
o
then
7 Let F = F ∪ {F
s
∗
}.;
8 Let s = s
∗
+ 1. ;
9 else
10 return F .
11 end
12 Increment c by one.;
13 end
14 return F .
Algorithm 3: Born Feature Selection (BORNFS).
7 COMPARING BORNFS WITH
LCC AND mRMR
In this section, we juxtapose LCC, mRMR, and
BORNFS concerning asymptotic computational com-
plexity, real-time efficiency, and the quality of their
outputs.
Algorithm Source
BORNFS Java executable codes available at (Shin
and Maeda, 2023)
mRMR C++ codes crafted by its creators,
sourced from (Peng, 2007).
LCC Java executable codes by its creators,
sourced from (Shin et al., 2015)
7.1 Asymptotic Time Complexity
The average time complexity of mRMR is O(k
2
n
I
n
F
),
where k denotes the number of features to select, and
that of LCC is O(n
I
n
F
logn
F
). In this section, we
demonstrate that the time complexity of BORNFS is
also O(n
I
n
F
logn
F
).
To analyze, for the ith iteration of selecting a fea-
ture, F
i−1
denotes the previously selected feature set,
and `
i
is a random variable representing the size of
the search range in the current iteration. For ease of
analysis, we consider `
i
as a continuous variable span-
ning the range [0,n
F
]. When f
i
(x) is the probabil-
ity density function of `
i
, f
i
(x|`
i−1
= t) =
1
t
holds for
x ∈ (n
F
−t, n
F
]. Thus, the expected size of the search
range, `
i
, is:
E(`
i
) =
Z
n
F
0
x f
i
(x)dx =
n
F
2
i−1
.
Therefore, during the binary search of the ith
iteration, mutual information values – requiring
O
(i + 2
−i
n
F
)n
I
time for each – are computed
log
n
F
2
i−1
times on average. The following equation of-
fers an approximation of the average time complexity:
dlog
2
n
F
e
∑
i=1
i +
n
F
2
i
n
I
log
n
F
2
i−1
≈
1
6
n
I
log
3
2
n
F
+ n
I
n
F
log
2
n
F
.
On the other hand, during the sorting procedure,
BORNFS computes ∆
r
(F; F
i−1
) and ∆
n
(F;F
i−1
) for
E(`
i
) features F, resulting in a time complexity of
O
i · 2
1−i
n
I
n
F
. Additionally, the time complexity
of sorting E(`
i
) features is O
2
1−i
n
F
log(2
1−i
n
F
)
.
They accumulate to O(n
I
n
F
) and O(n
F
logn
F
) across
i = 1, 2, . . . , dlog
2
n
F
e respectively.
Finally, it is concluded that the overall average
time complexity of BORNFS is O(n
I
n
F
logn
F
).
7.2 Run-Time Efficiency
We assessed runtimes using datasets presented in Ta-
ble 1, as shown in Figure 3. The left chart shows the
actual runtimes, while the right charts them relative
to BORNFS with Γ
R
. Notably, the drop in efficiency
from LCC is limited to merely fivefold.
7.3 Quality of Outputs
We ran BORNFS and LCC for t =
0.5,0.6, 0.7, 0.8, 0.9, 1.0 to obtain six feature subsets
for each algorithm and each dataset. We configured
mRMR to output the top 100 features in each run,
resulting in 100 feature subsets for each dataset.
From the obtained feature subsets, we identified
those with the highest scores of µ
H
. Figure 4 dis-
plays the attributes of the identified feature subsets
F , including: (a) µ
H
(F ;C); (b) I(F ;C); and (c) |F |.
These attributes are further analyzed in Table 2 and
Figure 5, which present a comparison of the algo-
rithms based on the averages across the datasets rel-
ative to BORNFS with Γ
R
. Specifically, Figure 5 il-
lustrates the balance among relevance, nuisance and
feature count using a radar chart.
BornFS: Feature Selection with Balanced Relevance and Nuisance and Its Application to Very Large Datasets
1105

Figure 3: Run-time in logarithmic scale (iMac Pro with 2.5GHz 14-core Xeon W, averages of ten trials).
(a) Maximum µ
H
(F ;C).
(b) Class relevance: I(F ;C).
(c) Feature count: |F |.
Figure 4: Results when µ
H
(F ;C) is maximized.
Table 2: Averaged ratios when µ
H
(F ;C) is maximized.
BORNFS
Γ
R
BORNFS
Γ
H
LCC mRMR
µ
H
(F ;C) 1.00 0.90 1.06 0.76
I(F ;C) 1.00 0.92 0.91 0.87
H(F | C) 1.00 1.02 0.68 1.95
|F | 1.00 0.50 3.12 3.84
The observation is that LCC records low nui-
sance scores across datasets without considering nui-
sance in feature selection. Despite this, LCC selects
more features than others; for example, in the GINA
dataset, BORNFS selects around 30 features while
LCC chooses over 500.
The difference arises from the feature selection
methodologies. LCC uses a pre-established feature
order, leading to redundant feature selection. In con-
trast, BORNFS updates its feature order based on pre-
viously selected features, reducing redundancy and
creating a more streamlined feature set.
8 APPLICATION TO A HUGE
REAL DATASET
To assess BORNFS’s performance on large datasets,
experiments were conducted using the EMBER repos-
itory, intended to foster malware detection research.
The dataset includes over 10 million features and
comprises 300,000 benign and 300,000 malicious
samples for training, along with 100,000 of each for
testing.
Due to the massive feature count over 10 million,
a two-step approach was adopted for BORNFS to ef-
ficiently handle the dataset:
1. Initial Reduction: BORNFS was deployed with
h = ∞ and t = 1.0 on the complete dataset to
significantly reduce the feature count. This step
likely leaves a substantial number of redundant
features.
2. Redundancy Elimination: To remove redundant
features from the initial reduction, BORNFS was
reapplied with h = 10 to the reduced feature set.
The threshold parameter t was varied among 1.0,
0.95, and 0.9 for this purpose.
Figure 5: Radar chart.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
1106

Table 3: Two-step application of BORNFS changing the hop
parameter values.
Initial h = ∞ h = 10
t = 1.0 t = 1.0 0.95 0.9
Feature count 10,868,073 541 540 155 50
AUC-ROC LGBM 0.97 0.97 0.96 0.86
AUC-ROC MLP 0.98 0.98 0.98 0.88
Runtime (min.) 24.33 515.92 69.09 9.57
To determine the predictive capability of the fea-
ture subsets from the two-step approach, LGBM and
MLP classifiers were used on the refined dataset, and
AUC-ROC scores were calculated. Remarkably, with
the threshold parameter t at 0.95, AUC-ROC scores
were high, reaching 0.96 for LGBM and 0.98 for MLP,
despite reducing the feature count from over 10 mil-
lion to just 155. These results are detailed in Table 3.
The experiment was conducted on an AWS
r5.4xlarge instance, which has 16 vCPUs and 128GB
of memory. The total time taken for the experiment
with t = 0.95 was 93 minutes, comprising 24 minutes
for the first step and an additional 69 minutes for the
second step.
9 CONCLUSION
Beyond the established metrics for evaluating the
goodness of feature selection, that is class relevance
and feature count, we introduced nuisance as a third
metric. This metric measures the amount of irrel-
evant data that can distort understanding. Our µ
H
score evaluates the balance between relevance and
nuisance and has shown a positive correlation with
classifier performance. Our method, BORNFS, har-
monizes these metrics and has outperformed others,
including LCC and mRMR, on large datasets. It main-
tains accuracy while reducing the number of features.
ACKNOWLEDGEMENTS
This work was supported by JSPS KAKENHI Grant
Number 21H05052, and Number 21H03775.
REFERENCES
Almuallim, H. and Dietterich, T. G. (1994). Learning
boolean concepts in the presence of many irrelevant
features. Artificial Intelligence, 69(1 - 2).
Anderson, H. S. and Roth, P. (2018). EMBER: an open
dataset for training static PE malware machine learn-
ing models. CoRR, abs/1804.04637.
Blake, C. S. and Merz, C. J. (1998). UCI repository of ma-
chine learning databases. Technical report, University
of California, Irvine.
Hall, M. A. (2000). Correlation-based feature selection
for discrete and numeric class machine learning. In
ICML2000, pages 359–366.
KDD (1999). KDD Cup 1999: Computer network intrusion
detection.
Kira, K. and Rendell, L. (1992). A practical approach to
feature selection. In ICML1992, pages 249–256.
NIPS (2003). Neural Information Processing Systems Con-
ference 2003: Feature selection challenge.
Peng, H. (2007). mRMR (minimum Redundancy Maximum
Relevance Feature Selection. http://home.penglab.
com/proj/mRMR/. Online; accessed 29-February-
2020.
Peng, H., Long, F., and Ding, C. (2005). Fea-
ture selection based on mutual information: Cri-
teria of max-dependency, max-relevance and min-
redundancy. IEEE TPAMI, 27(8).
Shin K. and Maeda K. (2023). Temporarily open at.
https://00m.in/Xud17.
Shin, K., Fernandes, D., and Miyazaki, S. (2011). Consis-
tency measures for feature selection: A formal defini-
tion, relative sensitivity comparison, and a fast algo-
rithm. In IJCAI2011, pages 1491–1497.
Shin, K., Kuboyama, T., Hashimoto, T., and Shepard, D.
(2015). Super-CWC and super-LCC: Super fast fea-
ture selection algorithms. In IEEE BigData 2015,
pages 61–67.
Shin, K., Kuboyama, T., Hashimoto, T., and Shepard, D.
(2017). sCWC/sLCC: Highly scalable feature selec-
tion algorithms. Information, 8(4).
WCCI (2006). IEEE World Congress on Computational In-
telligence 2006: Performance prediction challenge.
Yu, L. and Liu, H. (2003). Feature selection for high-
dimensional data: a fast correlation-based filter solu-
tion. In ICML2003.
Zhao, Z., Anand, R., and Wang, M. (2019). Maximum Rel-
evance and Minimum Redundancy Feature Selection
Methods for a Marketing Machine Learning Platform.
IEEE DSAA2019.
Zhao, Z. and Liu, H. (2007). Searching for interacting fea-
tures. In IJCAI2007, pages 1156 – 1161.
BornFS: Feature Selection with Balanced Relevance and Nuisance and Its Application to Very Large Datasets
1107
