
Transition of Model Performance in Dependence of the Amount of Data
Corruption with Respect to Network Sizes
Thomas Seidler
1,2 a
and Markus Abel
1,2 b
1
Ambrosys GmbH, Potsdam, Germany
2
Institute for Physics and Astronomy, Postsdam University, Potsdam, Germany
Keywords:
Phase Transition, Thermodynamics, Statistical Mechanics, Machine Learning, Image Classification, MNIST.
Abstract:
An important question for machine learning model concerns the achievable quality or performance of a model
with respect to given data. In other words, we want to answer the question how robust a model is with respect
to perturbation of the data. From statistical mechanics, a standard way to ”corrupt” input data is a study that
uses additive noise to perturb data. This, in turn, corresponds to typical situations in processing data from any
sensor as measurement noise. Larger models will often perform better, because they are able to capture more
variance of the data. However, if the information content cannot be retrieved due to too large data corruptions
a large network cannot compensate noise effects and no performance is gained by scaling the network. Here
we study systematically the said effect, we add diffusive noise of increasing strength on a logarithmic scale
to some well-known datasets for classification. As a result, we observe a sharp transition in training and test
accuracy as a function of the noise strength. In addition, we study if the size of a network can counterbalance
the described noise. The transition observed resembles a phase transition as described in the framework of
statistical mechanics. We draw an analogy between systems in statistical mechanics and Machine Learning
systems that suggests general upper bounds for certain types of problems, described as the tuple (data, model).
This is a fundamental result that may have large impact on practical applications.
1 INTRODUCTION
Any Machine Learning (ML) algorithm depends on
data as its input. The algorithm uses the input data
and transforms them to results which are ranked ac-
cording to a score. All data are limited in accuracy by
numerical accuracy, sensor noise, or noise in commu-
nication channels, etc.
Consequently, it is an important question to un-
derstand what amount of corruption an algorithm can
sustain, or at which noise level data corruption leads
to bad performance of a machine learning algorithm,
respectively. It is of equal importance to the optimal
model size needed for a successful training. We inves-
tigate both questions, inspired by the analogy of this
”coginition transition” and transitions as known from
physics - phase transitions and highlight how they are
related to one another in the light of statistical me-
chanics. To the best of our knowledge unveiling this
connection is a novel approach.
a
https://orcid.org/0000-0002-6870-5846
b
https://orcid.org/0000-0001-8963-6010
Statistical mechanics have been investigated in the
last decades (Bahri et al., 2020; Carleo et al., 2019;
M
´
ezard and Montanari, 2009) with strong reference
to early work on non-equilibrium thermodynamics of
learning (Gardner, 1988; Sompolinsky et al., 1990;
Gy
¨
orgyi, 1990; Seung et al., 1992; Watkin et al.,
1993), and more recent advances by Biehl et al.
(2007), and Advani et al. (2013).
We relate our study of noise on data to phase tran-
sitions that occur with increasing/decreasing temper-
ature in statistical mechanics.
The paper is structured as follows: We provide a
more detailed account of the background in Sec. 2.
We present the method and data we use in Sec. 3.
In Sec. 4 we present the results we find. In Sec. 5
and Sec. 6 we discuss the possible implications of our
findings and give an outlook to future directions of
study.
1084
Seidler, T. and Abel, M.
Transition of Model Performance in Dependence of the Amount of Data Corruption with Respect to Network Sizes.
DOI: 10.5220/0012435000003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 3, pages 1084-1091
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

2 BACKGROUND
The performance of Machine Learning models is in-
trinsically linked to the quality and quantity of data
used in training and inference (Cortes et al., 1994)
and the number of parameters in a model. The ef-
ficiency in terms of computational cost and speed is
furthermore related to mainly dataset and model size
(Al-Jarrah et al., 2015). With the advent of founda-
tional models, neural scaling laws, i.e. the scaling
of model performance with the amount of training
data and model size, have gained significance (Kaplan
et al., 2020). It is therefore of crucial importance for
the practitioner to gauge the requirements for quality
and amount of data to train an ML model of a certain
size, and how much improvement in model perfor-
mance can be expected by adding more data or scal-
ing the model in order to work in a cost-effective and
sustainable manner.
Noise is a common source of data imperfections.
The impact of data corruptions on model performance
is reviewed by Drenkow et al. (2021). Large amounts
of noise are generally detrimental to model perfor-
mance. Noise originates from multiple sources, e.g.
sensor noise, transmission errors, and noise in the
signal source itself. Noise in image recognition is
often modeled as additive Gaussian noise (Boncelet,
2009). The addition of noise to data has recently
gained attention in the field of generative, diffusion-
based models (Sohl-Dickstein et al., 2015; Ho et al.,
2020). These models are trained to de-noise im-
ages at varying intensities and subsequently generate
new images from the learned distribution, using pure
noise as input. The emphasis here is not on replicat-
ing real-world noise but on exploiting the statistical
properties of artificially introduced, controlled noise.
De-noising strategies and model architectures are re-
viewed by Tian et al. (2020), with notable applica-
tions found in Smilkov et al. (2017); Koziarski and
Cyganek (2017).
In statistical mechanics, noise is of thermal ori-
gin. Temperature drives phase transitions in (macro-
scopic) order parameters of ensembles of microscopic
constituents that are subject to thermal noise. A phase
transition is characterized by a sudden, in the limit of
infinitely large systems (thermodynamic limit), dis-
continuous change in one or more order parameters or
their derivatives. Such transitions are typically driven
by (thermal) noise. Real-world systems display finite-
size effects, as they do not reach the thermodynamic
limit. Instead of a true discontinuity, the order pa-
rameter typically changes in a sigmoidal shape, with
the parametrization of the sigmoid depending on the
system size. These effects are governed by scaling
laws. For an introduction into statistical mechanics,
see Huang (2009).
Phase transitions have been found and studied in
numerous non-physical systems, e.g. in biology (Hef-
fern et al., 2021), in computer science (Martin et al.,
2001), in social science (Perc et al., 2017), and espe-
cially in the dynamics of learning (Seung et al., 1992;
Watkin et al., 1993; Carleo et al., 2019; Bahri et al.,
2020) to name but a few examples. In turn, ML mod-
els are used to identify phase transitions in several
physical systems, e.g. in quantum mechanics (Rem
et al., 2019), complex networks (Ni et al., 2019), and
condensed matter (Carrasquilla and Melko, 2017).
More general approaches to detecting phase transi-
tions using Machine Learning are found in Canabarro
et al. (2019); Giannetti et al. (2019); Suchsland and
Wessel (2018).
ML model performance is quantitatively assessed
using metrics that statistically summarize the infer-
ence on all (microscopic) data points in train, test,
and validation datasets. This macroscopic quantity is
essentially an order parameter as they are defined in
statistical mechanics to describe systems with large
numbers of microscopic constituents. Especially in
classification tasks the analogy to spin systems is evi-
dent; the accuracy of a classification model describes
the average over a binary state variable, that is typi-
cally 1 for correct classification on a data point and
either −1 or 0 for an incorrect classification. In the
framework of statistical mechanics the dependence of
model performance on data quality (noise) is identi-
fied as the dependence of an order parameter on tem-
perature in the statistical mechanics sense, and neural
scaling laws are analogous to the scaling laws related
to finite-size effects. We draw an analogy between
the sigmoidal decline of model performance with in-
creasing noise and phase transitions. However, this
analogy is limited. While phase transitions in physical
systems are driven by external fields and microscopic
dynamics, we here investigate the static performance
of ML models on training and test data.
3 METHODS AND DATA
In this section, we explain which data we use, and
how we study them. In essence, we require the data to
be large enough in number to allow for an investiga-
tion over several scales, and the task should be simple
enough to allow for statistically significant noise vari-
ation, but complex enough to allow an extrapolation
for modern tasks in machine learning. We identified
image classification as a good task with many known
and available datasets.
Transition of Model Performance in Dependence of the Amount of Data Corruption with Respect to Network Sizes
1085
Table 1: Summary of the features of the MNIST, Fashion-
MNIST (F-MNIST), and EMNIST (balanced) dataset.
MNIST F-MNIST EMNIST
number of 1797 70 000 131 600
images
classes 10 10 47
image size 8 ×8 28 ×28 28 ×28
3.1 Classification Datasets
We study the influence of noise on the performance of
a network and the possible consequences on network
architecture or size in image classification tasks.One
of the probably best-studied datasets is the MNIST
dataset (LeCun et al., 2010; Deng, 2012). How-
ever the dataset size is N
MNIST
≃ 10
3 1
which is too
small for a reasonable study over several scales and
considered ”too easy” to provide a basis for mean-
ingful studies (Xiao et al., 2017). The FashionM-
NIST dataset provides the same number of (balanced)
classes as MNIST and a similar amount of available
data but on downscaled greyscale images of fashion
items. The FashionMNIST benchmark studies (Xiao
et al., 2017) show that the classification models for
fashion items generally achieve poorer performance
compared to the same model setups for handwritten
digits. For our purpose this is a defining trait of a
dataset being more complex in terms of the classifica-
tion task at hand. The EMNIST dataset (Cohen et al.,
2017) contains the MNIST data as a subset, but adds
other handwritten literals and contains more samples
per class, see Tab. 1. The added number of classes
in EMNIST further increases complexity (Baldomi-
nos et al., 2019), so we focus on the EMNIST data in
the further presentation.
Figure 1: EMNIST example image, belonging to class num-
ber 13 ( the letter ”H”).
1
In the aggregation that we use found in Tensorflow De-
velopment Team (2023)
3.2 Modeling Noise
Noise in realistic data can have many causes, and ex-
hibit complicated distributions in the noise signal; it
can be additive or multiplicative, and be subject to
very complex generation mechanisms (van Kampen,
1992).
For the EMNIST data, we have to consider that
the images have pixelwise greyscale values bounded
between 0 and 255. Naively, one might attempt to use
Gaussian noise of zero mean and varying variance to
control the intensity. That will result in essentially en-
larging the original domain of the data for large noise
additions.
One way out of the described dilemma is given
by recent developments, so-called denoising diffusion
probabilistic models (DDPM) (Sohl-Dickstein et al.,
2015), e.g. Stable Diffusion (Ho et al., 2020). In
the following, we outline the data corruption scheme
from (Ho et al., 2020), which is the sampling scheme
used in this study, to introduce some notation.
The rule for adding Gaussian noise to initial data
x
0
∈ R
d
to produce a corrupted data sample x
t
reads
x
t
= f (x
t−1
,γ
t
)x
t
+ g(x
t−1
,β
t
)ε
β
t
(1)
Where β
t
, γ
t
are (series of) constants called a noise
schedule, ε is noise drawn from a Gaussian distribu-
tion with variance β
t
and 0 mean, and t denotes the
timestep in the Markov chain used to gradually add
noise. f (x
t−1
,γ
t
) can be interpreted as drift of the
mean, whereas g(x
t−1
,β
t
) governs the diffusion pro-
cess.
It can be shown that this formulation is equiva-
lent to using Markov transition kernels to transform
the prior distribution q(x
0
) to another distribution
p
X
t
(x
t
) =
R
p(x
t
|x
t−1
)p(x
t−1
)dx
t−1
with the proper
choices of the transition kernel p(x
t
|x
t−1
) and sam-
pling from this transformed distribution.
Our goal is to approximate a well-known distri-
bution, in our case a Guassian of zero mean and unit
variance, while using a version of the original data
that is scaled to zero mean and unit variance in a pre-
processing step as ground truth.
We choose the transition kernel to be a Gaussian
conditioned via its mean on the prior value and utilize
a noise schedule {β
t
}
t∈(0,...,T )
such that the transition
kernel reads
p(x
t
|x
t−1
) = N (x
t
;
p
1 −β
t
x
t−1
,β
t
I). (2)
We can the expand on the series of Markov transi-
tions to write
q(x
T
|x
0
) = Π
T
t=0
N (x
t
;
p
1 −β
t
x
t−1
,β
t
I). (3)
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
1086

Using the notation α
t
:= 1 −β
t
and
¯
α
t
:= Πα
t
and
some basic calculus, we can define the closed form
distribution at timestep t as
q(x
t
|x
0
) = N (x
t
;
√
¯
α
t
x
0
,
p
(1 −
¯
α
t
)I) (4)
Equivalently, the sampling can the be realized as
x
t
=
√
¯
α
t
x
0
+
p
1 −
¯
α
t
ε
0,I
. (5)
The choice of variance schedule β needs to ensure
that
¯
α
t
→0 for t >> 1 so that we approximate a Gaus-
sian distribution of zero mean and unit variance.
Note that σ :=
p
(1 −
¯
α
t
) defines the standard de-
viation in the sampling scheme, while µ :=
√
¯
α
t
scales
the mean value of the distribution. We will use
κ := σ/µ (6)
as a dimensionless parameter to indicate noise in-
tensity.
The noise schema described above achieves ex-
actly what we desire: A mapping between original
distribution and pure noise distribution (i.e. signal to
noise ratio κ
−1
→ 0 as t → T ) with a cheap sampling
scheme and conservation of the domain of the target
set.
The result of the process is depicted for two noise
levels in Fig. 2.
3.3 Experiment Design
This study investigates the robustness of feedforward
artificial neural networks by varying the number of
hidden units, and noise intensities in the data, to un-
derstand the transition from optimal model accuracy
to baseline accuracy (that is identical with guessing
the label for each image).
3.3.1 Model Architecture
We utilized a multilayer perceptron (MLP), a class of
feedforward artificial neural network. The MLP was
designed with an input layer, one hidden layer, and an
output layer. The hidden layer used the rectified linear
unit (ReLU) activation function, ensuring non-linear
transformations of the inputs. The output layer’s acti-
vation function was tailored to the nature of the task,
i.e. softmax for the classification tasks.
For details on ML models and methods we refer
to Goodfellow et al. (2016).
3.3.2 Hyperparameters
Hyperparameters in machine learning typically re-
fer to non-trainable parameters of the model. How-
ever, in our experiment design, models and data are
Figure 2: EMNIST image with three different noise intensi-
ties added, top: κ = 46, middle: κ = 134, bottom: κ = 871.
constituents of one joint system. Especially the dis-
tribution of model performance is expected to be
parametrized by parameters that describe both models
and data. In this context, we refer to all non-trainable
parameters as hyperparameters in our experiments,
including noise intensity, but also ”classical” hyper-
parameters regarding the models that are trained, in-
cluding the model size.
We experimented with varying the number of hid-
den units in the MLP models, specifically testing con-
figurations with (2,4,8, 16,32, 64,128) units respec-
tively.
To evaluate the robustness of the MLP models
against noisy data, we introduced different intensi-
ties of noise into the datasets. They are characterized
by the κ value from the noise scheme, cf. Sec. 3.2.
This noise was artificially generated, simulating real-
world data imperfections. The noise schedule that
Transition of Model Performance in Dependence of the Amount of Data Corruption with Respect to Network Sizes
1087
was used is given by β
t
= β
0
+ (β
T
−β
0
)t/n
steps
with
β
0
= 0.0001, β
T
= 0.02, and n
steps
= 3000. We took
samples every 300 steps.
3.3.3 Training and Evaluation
The MLP models were trained using a backpropaga-
tion algorithm with the Adam optimizer, a variant of a
stochastic gradient descent. The models were trained
for a maximum of 200 epochs. Model performance
was evaluated using the accuracy score, given by
acc(y, ˆy) =
1
n
samples
∑
1( ˆy
i
= y
i
) (7)
where y is the predicted label, ˆy the true label, and
1(a,b) = 1 i f a = b, else 0 is the indicator function.
Other metrics, namely F1 score, precision, and re-
call on test and training datasets have been recorded as
well, but did not yield additional insights. To specif-
ically measure robustness, we measured the perfor-
mance of each model as a function of noise intensity.
Training of ML models is not necessarily deter-
ministic, as it depends on the random initialization
of weights, and in our case random noise on the data
which is newly sampled for each training run. Some
training algorithms are not fully deterministic as well,
e.g. stochastic gradient descent. Especially in the
regime of large noise it might well be the case that
no global but rather a local minimum is found in the
optimization. As such, the training and test metrics
in each training run have to be interpreted as random
variables, sampled from an unknown distribution that
can be parametrized by the hyperparameters of inter-
est.
We measure the first and second moments of the
parametric family of distributions, i.e. averages and
standard deviations of training and test metrics. We
thus repeat the training for each set of hyperparame-
ters N
realizations
= 10 times, and refer to a single train-
ing run as a realization of the system.
3.3.4 Execution
All models were implemented using the scikit-learn
framework (Pedregosa et al., 2011), and parallelized
with the dask library (Dask Development Team,
2016). Experiments were run on the JUWELS com-
puting cluster, ensuring consistent and efficient com-
putation. The combinatorics of model architectures
as well as noise intensities poses a practical challenge.
The study amounts to ≈800 training runs, consuming
O(10
3
) CPU-hours in total. In order to keep track of
all hyperparameters and metrics computed, the man-
tik platform (Seidler et al., 2023) was used for exper-
iment execution and tracking.
4 RESULTS
In this section, we describe results for the EMNIST
dataset to have a dataset large enough to avoid insuf-
ficient results due to size. Notions of model perfor-
mance refer to the accuracy score. Qualitatively iden-
tical results have been observed for the F1-score.
Our study aims at determining scaling laws of
model performance with respect to size and identify-
ing phase transitions with respect to noise in the data.
In statistical mechanics, that amounts to mimic the
asymptotic limit N
net
7→ ∞, such that a discontinuous
transition is observed. For such a study, in statisti-
cal mechanics, one has to consider finite-size effects.
These effects are evident in the saturation of optimal
model performance with increasing model size.
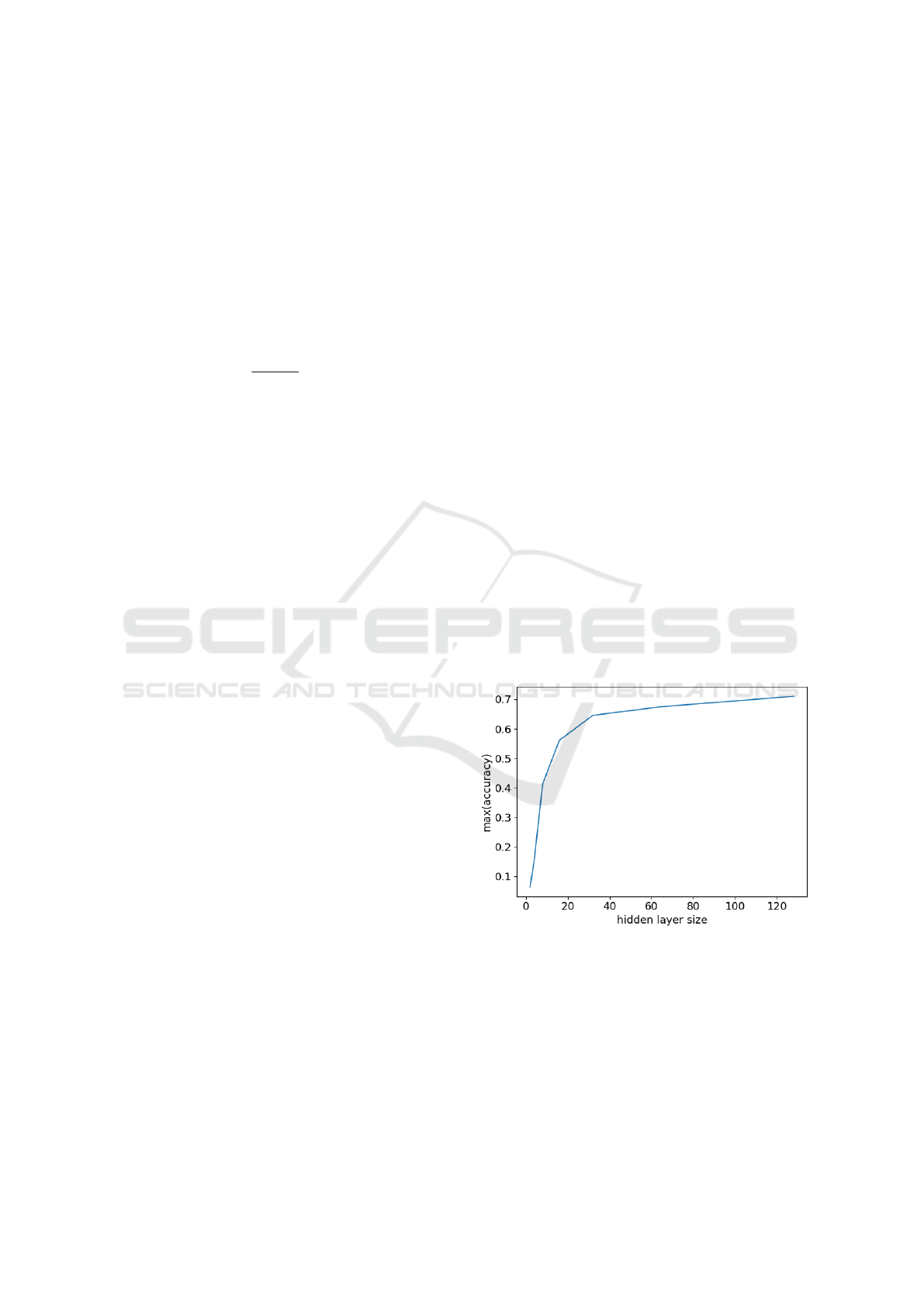
We study the convergence of the optimal accu-
racy achievable with multilayer perceptrons of vary-
ing size. In Fig. 3 we display the maximum test score
achieved with the perceptron model for increasing
size of the single layer used. We observe a conver-
gence and saturation for large N
net
. This is explained
by the relatively easy task to classify just N
classes
= 47
classes. with data of resolution N
pix
= 28x28. With
e.g. 128 neurons, we can capture O(2
128
) combina-
tions, and consequently much, if not all, of variance
of the images studied. So, we observe approximate
saturation at N
net
≃ 64, which is, again, characteristic
for the particular model and dataset studied.
Figure 3: Maximum test accuracy as a function of number
of hidden units in a feed forward neural network trained on
EMNIST data.
In Fig. 4, we show model performance as a func-
tion of noise for one very small network (N
network
= 2)
and one where the optimal performance approaches
saturation (N
network
= 128) as indicated in Fig. 3.
Clearly, overfitting occurs for larger network size in
the training, and smaller network size leads to the
expected incapability of the model to capture any
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
1088
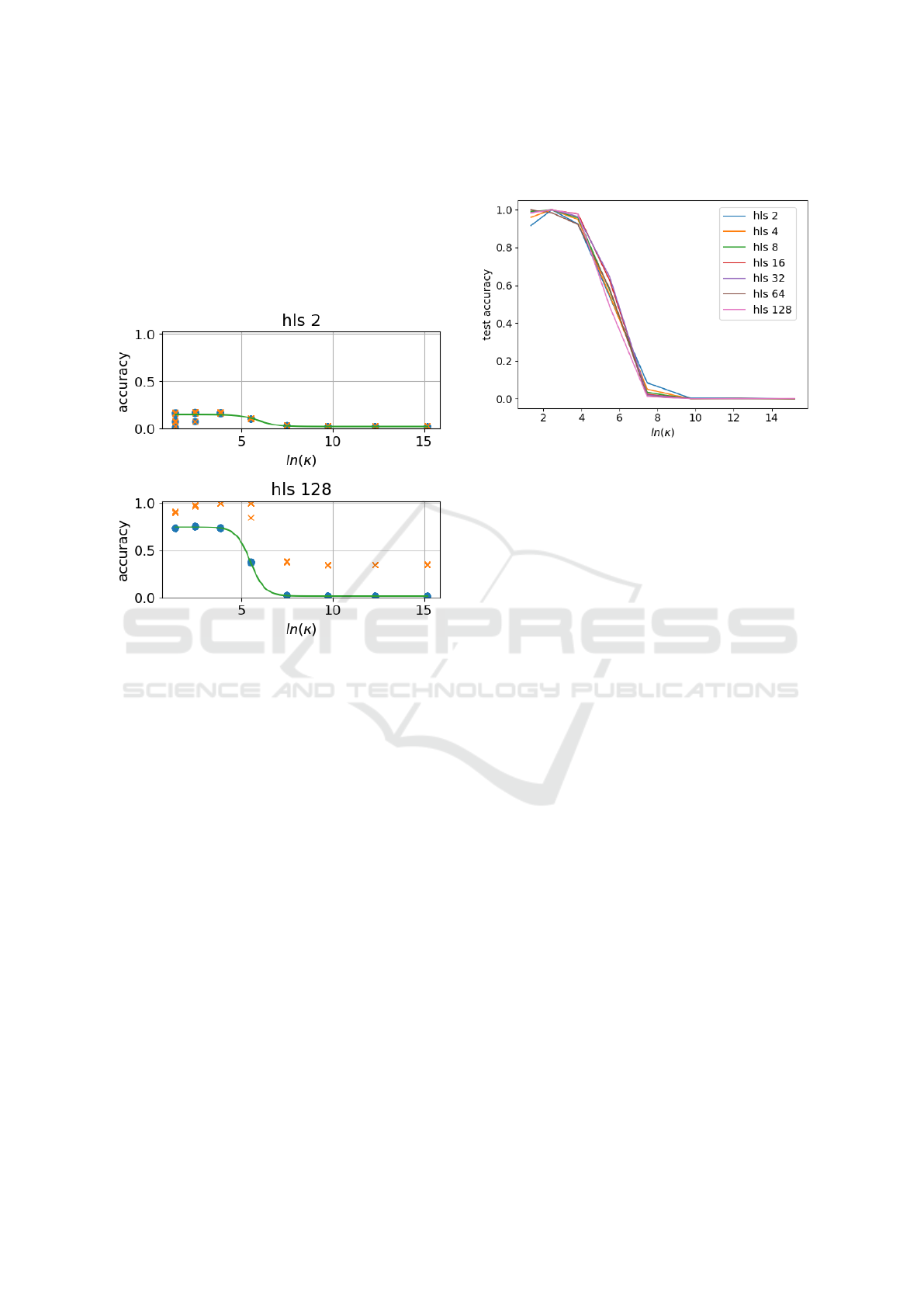
classification. For the test data, we find in all net-
work sizes a sigmoid-shaped transition with increas-
ing noise level. For the small network shown, with
N
network
= 2 we find an upper bound for the test data
of accuracy acc = 0.2 (we start with an obviously
insufficient number of nodes), while the larger net-
work with N
network
= 128 saturates at approximately
acc = 0.75 test accuracy for small noise intensity.
Figure 4: Test accuracy (blue circle), training accuracy (or-
ange cross), and sigmoidal fit (green) as a function of noise
intensity for model sizes (hidden layer size hls = (2,128))
on the EMNIST dataset. The R
2
-score for the fits are 0.82
for hls = 2, and > 0.99 for hls = 128 indicating that for the
larger model the data matches the sigmoid function very
well. Note that a too large model size causes overfitting
(training score= 1) but increase maximum test accuracy.
Phenomenologically, this resembles a phase tran-
sition, as it occurs in physics, e.g. in changes of state
from gas to liquid, magnetization, spin glasses - criti-
cal phenomena in general. We do not try to formally
map the small network with (with respect to the ther-
modynamic limit) small data.
In Fig. 5 we show the results for N
net
=
2,4, 8,16,32,64,128, where we have scaled the accu-
racy to minimum 0 and maximum 1. As discussed
above this is necessary because for small network
size, the maximum accuracy decreases. Remarkably,
the scaled curves overlap nicely, indicating that the
transition can be modeled by the same family of func-
tions regardless of network size. In Fig. 4 we show
that the transition has sigmoidal shape. Note that the
results are special to the investigated model (multi-
layer perceptron) and data (EMNIST), and the ques-
tion in how far the result is universal remains open
until we have studied a large set of models for dif-
ferent datasets, starting with different models for the
EMNIST data.
Figure 5: Maximum accuracy score out of the N
realizations
=
10 realizations as a function of logarithm of noise intensity
κ, normalized to maximum overall scores, for all studied
model sizes (hidden layer size hls).
5 CONCLUSION
We investigate the question in how far the transition
observed above is general. In the context of statisti-
cal mechanics, we want to understand i) whether the
transition point is universal for the data studied, or
the model used. We would expect that more elaborate
models do not only classify with better accuracy, but
also be able to account for more noise in the data; ii)
whether the transition shape is universal for different
models; iii) whether the transition (shape and point)
does depend on the noise, i.e. if Gaussian noise has
different results than uniformly distributed noise or
exponentially or spatially varying one.
As a starting point, we have studied one dataset
with one particular model, and therein we have varied
the network size in a controlled way - the model was
deliberately chosen to be simple and understandable
before we step to more general investigations.
We have shown that the analogy to the phe-
nomenology of phase transitions can be applied to es-
timate model robustness to noise in the data and un-
derstand scaling of model performance with model
size. However, we have focused on the task of im-
age classification and investigated only datasets that
are closely related to one another. While this was
necessary in order to have controlled experimentation
conditions, it is favorable to define measures that are
intrinsic to data and models, i.e. intrinsic to the prob-
ability densities involved, without having to rely on
specific choices of metrics or noise.
Transition of Model Performance in Dependence of the Amount of Data Corruption with Respect to Network Sizes
1089

6 OUTLOOK
Further studies will focus on scaling of the observed
phenomena with the size of the dataset - a very impor-
tant question for real applications and related to en-
ergy saving and sustainability questions. It may well
be that for certain data it is useless to increase the size
of the data, because model performance is already in
saturation. Further, we will study the shape of the
transition in detail for a statistically representative set
of models, e.g. CNN vs. RNN vs. perceptrons. Lastly
we will extend the study to more diverse datasets.
Information theory provides definitions and inter-
pretations of quantities also known in statistical me-
chanics, such as entropy, in a way that is readily us-
able in the context of our experiments. A future goal
concerns theoretical work on universality of phase
transitions and scaling laws for (model, data) tuples
and their representation with respect to given tasks,
like classification and regression. The goal is to uni-
versally compare models and datasets to one another
with respect to robustness, to infer both dataset com-
plexity and model robustness, ultimately defining uni-
versality classes, as are well known from the theory of
phase transitions.
Eventually, we expect that studies on the finite size
effect, i.e. little data and/or small networks play a cru-
cial role. Our final aim is to provide a tool to deter-
mine the optimum network size and data size for a
problem given, in particular when data quality is un-
known.
ACKNOWLEDGEMENTS
We acknowledge fruitful discussions with F. Em-
merich, M. Quade, and M. Schultz. This work is sup-
ported by the KI:STE project, grant no. 67KI2043 by
the German ministry for ecology. This research was
supported in part by the National Science Foundation
under Grant No. NSF PHY-1748958.
REFERENCES
Advani, M., Lahiri, S., and Ganguli, S. (2013). Statisti-
cal mechanics of complex neural systems and high
dimensional data. Journal of Statistical Mechanics:
Theory and Experiment, 2013(03):P03014.
Al-Jarrah, O. Y., Yoo, P. D., Muhaidat, S., Karagiannidis,
G. K., and Taha, K. (2015). Efficient machine learning
for big data: A review. Big Data Research, 2(3):87–
93. Big Data, Analytics, and High-Performance Com-
puting.
Bahri, Y., Kadmon, J., Pennington, J., Schoenholz, S. S.,
Sohl-Dickstein, J., and Ganguli, S. (2020). Statistical
mechanics of deep learning. Annual Review of Con-
densed Matter Physics, 11:501–528.
Baldominos, A., Saez, Y., and Isasi, P. (2019). A survey
of handwritten character recognition with MNIST and
EMNIST. Applied Sciences (Switzerland), 9.
Biehl, M., Ahr, M., and Schl
¨
osser, E. (2007). Statistical
physics of learning: Phase transitions in multilayered
neural networks. Advances in Solid State Physics 40,
pages 819–826.
Boncelet, C. (2009). Chapter 7 - Image Noise Models. In
Bovik, A., editor, The Essential Guide to Image Pro-
cessing, pages 143–167. Academic Press, Boston.
Canabarro, A., Fanchini, F. F., Malvezzi, A. L., Pereira, R.,
and Chaves, R. (2019). Unveiling phase transitions
with machine learning. Phys. Rev. B, 100:045129.
Carleo, G., Cirac, I., Cranmer, K., Daudet, L., Schuld,
M., Tishby, N., Vogt-Maranto, L., and Zdeborov
´
a, L.
(2019). Machine learning and the physical sciences.
Reviews of Modern Physics, 91:045002.
Carrasquilla, J. and Melko, R. G. (2017). Machine learning
phases of matter. Nature Physics, 13(5):431–434.
Cohen, G., Afshar, S., Tapson, J., and Schaik, A. V. (2017).
EMNIST: Extending MNIST to handwritten letters.
Proceedings of the International Joint Conference on
Neural Networks, 2017-May.
Cortes, C., Jackel, L. D., and Chiang, W.-P. (1994). Limits
on learning machine accuracy imposed by data qual-
ity. Advances in Neural Information Processing Sys-
tems, 7.
Dask Development Team (2016). Dask: Library for dy-
namic task scheduling.
Deng, L. (2012). The mnist database of handwritten digit
images for machine learning research. IEEE Signal
Processing Magazine, 29:141–142.
Drenkow, N., Sani, N., Shpitser, I., and Unberath, M.
(2021). A systematic review of robustness in deep
learning for computer vision: Mind the gap? arXiv
preprint arXiv:2112.00639.
Gardner, E. (1988). The space of interactions in neural net-
work models. Journal of Physics A: Mathematical and
General, 21(1):257.
Giannetti, C., Lucini, B., and Vadacchino, D. (2019). Ma-
chine learning as a universal tool for quantitative in-
vestigations of phase transitions. Nuclear Physics B,
944:114639.
Goodfellow, I., Bengio, Y., and Courville, A. (2016). Deep
Learning. MIT Press. http://www.deeplearningbook.
org.
Gy
¨
orgyi, G. (1990). First-order transition to perfect gen-
eralization in a neural network with binary synapses.
Physical Review A, 41(12):7097–7100.
Heffern, E., Huelskamp, H., Bahar, S., and Inglis, R. F.
(2021). Phase transitions in biology: From bird flocks
to population dynamics. Proceedings of the Royal So-
ciety B: Biological Sciences, 288.
Ho, J., Jain, A., and Abbeel, P. (2020). Denoising diffusion
probabilistic models. Advances in Neural Information
Processing Systems.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
1090

Huang, K. (2009). Introduction to Statistical Physics, Sec-
ond Edition. Taylor & Francis.
Kaplan, J., McCandlish, S., Henighan, T., Brown, T. B.,
Chess, B., Child, R., Gray, S., Radford, A., Wu, J., and
Amodei, D. (2020). Scaling laws for neural language
models. CoRR, abs/2001.08361.
Koziarski, M. and Cyganek, B. (2017). Image recognition
with deep neural networks in presence of noise – deal-
ing with and taking advantage of distortions. Inte-
grated Computer-Aided Engineering, 24:1–13.
LeCun, Y., Cortes, C., and Burges, C. J. (2010). MNIST
handwritten digit database. ATT Labs [Online]. Avail-
able: http://yann.lecun.com/exdb/mnist, 2.
Martin, O. C., Monasson, R., and Zecchina, R. (2001).
Statistical mechanics methods and phase transitions
in optimization problems. Theoretical Computer Sci-
ence, 265(1):3–67. Phase Transitions in Combinato-
rial Problems.
M
´
ezard, M. and Montanari, A. (2009). Information,
Physics, and Computation. Oxford University Press.
Ni, Q., Tang, M., Liu, Y., and Lai, Y.-C. (2019). Machine
learning dynamical phase transitions in complex net-
works. Phys. Rev. E, 100:052312.
Pedregosa, F., Varoquaux, G., Gramfort, A., Michel, V.,
Thirion, B., Grisel, O., Blondel, M., Prettenhofer,
P., Weiss, R., Dubourg, V., Vanderplas, J., Passos,
A., Cournapeau, D., Brucher, M., Perrot, M., and
Duchesnay, E. (2011). Scikit-learn: Machine learning
in Python. Journal of Machine Learning Research,
12:2825–2830.
Perc, M., Jordan, J. J., Rand, D. G., Wang, Z., Boccaletti, S.,
and Szolnoki, A. (2017). Statistical physics of human
cooperation. Physics Reports, 687.
Rem, B., K
¨
aming, N., Tarnowski, M., Asteria, L.,
Fl
¨
aschner, N., Becker, C., Sengstock, K., and Weiten-
berg, C. (2019). Identifying quantum phase transitions
using artificial neural networks on experimental data.
Nature Physics, 15:1.
Seidler, T., Emmerich, F., Ehlert, K., Berner, R., Nagel-
Kanzler, O., Schultz, N., Quade, M., Schultz, M. G.,
and Abel, M. (2023). Mantik: A workflow plat-
form for the development of artificial intelligence on
high-performance computing infrastructures. Submit-
ted for publication to Journal of Open Source Soft-
ware September 2023.
Seung, H. S., Sompolinsky, H., and Tishby, N. (1992). Sta-
tistical mechanics of learning from examples. Physi-
cal Review A, 45:6056–6091.
Smilkov, D., Thorat, N., Kim, B., Vi
´
egas, F. B., and Wat-
tenberg, M. (2017). Smoothgrad: removing noise by
adding noise. CoRR, abs/1706.03825.
Sohl-Dickstein, J., Weiss, E. A., Maheswaranathan, N., and
Ganguli, S. (2015). Deep unsupervised learning using
nonequilibrium thermodynamics. 32nd International
Conference on Machine Learning, ICML 2015, 3.
Sompolinsky, H., Tishby, N., and Seung, H. S. (1990).
Learning from examples in large neural networks.
Phys. Rev. Lett., 65:1683–1686.
Suchsland, P. and Wessel, S. (2018). Parameter diagnos-
tics of phases and phase transition learning by neural
networks. Phys. Rev. B, 97:174435.
Tensorflow Development Team (2023). TensorFlow
Datasets, a collection of ready-to-use datasets. https://
www.tensorflow.org/datasets. Accessed: 13.11.2023.
Tian, C., Fei, L., Zheng, W., Xu, Y., Zuo, W., and Lin, C.-
W. (2020). Deep learning on image denoising: An
overview. Neural Networks, 131:251–275.
van Kampen, N. (1992). Stochastic Processes in Physics
and Chemistry. Elsevier Science Publishers, Amster-
dam.
Watkin, T. L., Rau, A., and Biehl, M. (1993). The statisti-
cal mechanics of learning a rule. Reviews of Modern
Physics, 65.
Xiao, H., Rasul, K., and Vollgraf, R. (2017). Fashion-
MNIST: a Novel Image Dataset for Benchmark-
ing Machine Learning Algorithms. arXiv preprint
arXiv:1708.07747.
Transition of Model Performance in Dependence of the Amount of Data Corruption with Respect to Network Sizes
1091
