
Exploring the Impact of Knowledge Graphs on Zero-Shot Visual Object
State Classification
Filippos Gouidis
1,2 a
, Konstantinos Papoutsakis
1 b
, Theodore Patkos
3 c
, Antonis Argyros
2,3 d
and
Dimitris Plexousakis
2,3 e
1
Department of Management, Science and Technology, Hellenic Mediterranean University, Agios Nikolaos, Greece
2
Computer Science Department, University of Crete, Heraklion, Greece
3
Institute of Computer Science, Foundation for Research and Technology Hellas, Heraklion, Greece
Keywords:
Visual Object State Classification, Zero-Shot Learning, Knowledge Graphs, Graph Neural Networks.
Abstract:
In this work, we explore the potential of Knowledge Graphs (KGs) towards an effective Zero-Shot Learning
(ZSL) approach for Object State Classification (OSC) in images. For this problem, the performance of tradi-
tional supervised learning methods is hindered mainly by data scarcity, as they attempt to encode the highly
varying visual features of a multitude of combinations of object state and object type classes (e.g. open bottle,
folded newspaper). The ZSL paradigm does indicate a promising alternative to enable the classification of
object state classes by leveraging structured semantic descriptions acquired by external commonsense knowl-
edge sources. We formulate an effective ZS-OSC scheme by employing a Transformer-based Graph Neural
Network model and a pre-trained CNN classifier. We also investigate best practices for both the construction
and integration of visually-grounded common-sense information based on KGs. An extensive experimental
evaluation is reported using 4 related image datasets, 5 different knowledge repositories and 30 KGs that are
constructed semi-automatically via querying known object state classes to retrieve contextual information at
different node depths. The performance of vision-language models for ZS-OSC is also assessed. Overall, the
obtained results suggest performance improvement for ZS-OSC models on all datasets, while both the size of
a KG and the sources utilized for their construction are important for task performance.
1 INTRODUCTION
In recent years, the field of computer vision has
witnessed remarkable advancements based on so-
phisticated Deep Neural Network models capable
of performing various complex visual recognition
tasks (Zhou et al., 2023). Traditional supervised
learning methods exhibit state-of-the-art performance
in various challenging problems based on labeled data
for training, the collection and preparation of which is
often expensive and time-consuming; a fact that hin-
ders the application of the relevant methods in com-
plex scenarios and open-world problems. Zero-shot
Learning (ZSL) has emerged as a promising learn-
ing strategy to address this limitation (Xian et al.,
2019). ZSL aims to enable learning of novel target
a
https://orcid.org/0000-0002-9539-8749
b
https://orcid.org/0000-0002-2467-8727
c
https://orcid.org/0000-0001-6796-1015
d
https://orcid.org/0000-0001-8230-3192
e
https://orcid.org/0000-0002-0863-8266
classes not present in the training data by leveraging
previously learned features as well as semantic de-
scriptions or attributes, if available, that are associ-
ated with the classes (Lampert et al., 2013; Narayan
et al., 2020). By exploiting features learned from
the same or other datasets and knowledge transfer ac-
quired by external data repositories from seen to un-
seen classes, ZSL provides a practical solution for
recognizing the latter, thereby pushing the boundaries
of visual recognition in challenging real-world sce-
narios (Monka et al., 2022; Pourpanah et al., 2023).
The more specific task of Zero-shot Object Recog-
nition (ZSR) in images provides an intriguing exten-
sion of the ZSL paradigm, emphasizing the ability
of machine learning models to generalize beyond the
training samples. Such a strategy enables recognition
of novel classes by integrating semantic attributes and
their representation, i.e. in the form of feature em-
beddings, or textual descriptions associated with both
known (seen) and novel (unseen) classes (Xian et al.,
2019).
738
Gouidis, F., Papoutsakis, K., Patkos, T., Argyros, A. and Plexousakis, D.
Exploring the Impact of Knowledge Graphs on Zero-Shot Visual Object State Classification.
DOI: 10.5220/0012434800003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 2: VISAPP, pages
738-749
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

Figure 1: The proposed approach for Zero-shot Object State
Classification combines structured representations of object
states acquired from knowledge graphs with pre-trained vi-
sual information to infer previously unseen combinations of
objects and object states.
In the pursuit of addressing the limitations of tra-
ditional supervised learning in Computer Vision, the
integration of Knowledge Graphs (KGs) (Anh et al.,
2021; Ilievski et al., 2021) also emerges as a promis-
ing line of research (Monka et al., 2022; Chen et al.,
2023). General-purpose KGs contain domain, fac-
tual, and often commonsense knowledge by organiz-
ing semantic and possibly multi-modal features and
relationships of entities, providing valuable encoding
in symbolic form that can be integrated with neu-
ral models. In particular, annotation data from im-
ages or videos can be used to organize rich visually
grounded knowledge into graphs using entities that
are associated with various action types, human body
parts, object classes and attributes, or other types of
visual or non-visual information and their spatial or
spatio-temporal relationships in case of video (Ghosh
et al., 2020). By mining KGs for relevant semantic
embeddings, ZSR models gain access to rich contex-
tual knowledge, enabling a more efficient knowledge
transfer between known and unknown/novel classes.
Due to the immense potential of KGs in enriching vi-
sual recognition tasks, their role in this context is at-
tracting increasing attention from researchers.
In the context of visual object recognition, object
states can be viewed as a subset of perceptible object
attributes. Attributes typically refer to static, inherent
properties of objects, such as color, shape, or texture.
In contrast, object states are associated with the dy-
namic aspects of changes in appearance, shape, and
functionality (e.g., unfolded, closed, full etc.) which
is related to a past action performed on the object
(e.g., folding, closing, pouring etc.). Recognizing ob-
ject states in images is generally more challenging
compared to attributes due to the complexity involved
in representing subtle visual information and contex-
tual variations that object states entail. What is more,
effective recognition of object states requires, accord-
ing to the data-driven supervised learning paradigm,
exhaustive training across a vast number of combi-
nations of object classes and state classes, to capture
their huge intra- and inter-class variability.
In this work, we aspire to investigate possible
solutions for the task of visual Object State Classi-
fication (OSC) in images inspired by the paradigm
of Zero-shot Classification using Knowledge Graphs
(ZS-KG) (Nayak and Bach, 2022; Kampffmeyer
et al., 2019). To achieve this goal (see Figure 1), we
explore the construction of KGs and the integration of
semantic information into Graph Convolutional Net-
work models (GCNs), as powerful tools for learning
visually-grounded knowledge in the context of ZSL.
An effective CNN-based object classifier is also em-
ployed and adapted for ZS-OSC. The extensive exper-
imental evaluation conducted suggests that learning
structured semantic representations of the relation-
ships among different objects and object state enti-
ties/concepts mined from KGs enables transfer learn-
ing to the CNN-based classifier with high accuracy.
Thus, our main contributions are the following:
1. We formulate a ZSL approach for the task of OSC
in images using KGs and GCN models. In con-
trast to existing methods (Gouidis et al., 2023),
our work explores the more challenging, zero-shot
variant of this task.
2. Multiple different KGs have been constructed to
organize structured semantic information related
to object states. We conduct a comparative study
of their performance, as well as a comparison with
Large Language Vision models toward the ZS-
OSC task.
3. Our findings demonstrate improved performance
toward the ZS-OSC task and the importance of us-
ing visually grounded KGs to enable the transfer
of structured semantic knowledge related to object
states into a deep neural classification model.
The project code/material is publicly available
1
.
2 RELATED WORK
Object State/Attribute Recognition. The term
“visual attributes” commonly refers to visual con-
cepts that are perceivable by humans and AI-enabled
agents (Duan et al., 2012). Currently, the preva-
lent approach for learning attributes is similar to
1
https://github.com/papoutsakos/interlink
Exploring the Impact of Knowledge Graphs on Zero-Shot Visual Object State Classification
739

that of object categories, involving training convolu-
tional neural networks with discriminative classifiers
on annotated image datasets (Singh and Lee, 2016).
Few works focus on state classification (Gouidis
et al., 2022), while most of them rely on the
same assumptions used for the attribute classification
task. Recently, a multi-task, self-supervised learning
method (Sou
ˇ
cek et al., 2022) was proposed to jointly
learn to temporally localize object state changes and
the corresponding state-modifying actions in videos.
A prominent research direction to tackle this task
refers to zero-shot learning that gained considerable
attention in recent years due to its practical signifi-
cance in real-world applications, mitigating the prob-
lem of collecting and learning training data for a very
large number of object classes (Xian et al., 2018a).
One prevalent zero-shot learning approach involves
the use of semantic embeddings to represent objects
and their attributes in a low-dimensional space (Wang
et al., 2018).
Recently, the advent of powerful generative mod-
els also provided a promising research direction to-
wards zero-shot object classification (Xian et al.,
2018b; Changpinyo et al., 2016), by generating im-
ages of objects that resemble instances from seen/-
known object classes. This enables the generation
of new samples for previously unseen object classes.
In the same line of work, the recent work by (Saini
et al., 2023) focuses on the recognition of object states
based on the concept of compositional generation of
novel object-state images, also introducing the Chop
& Learn dataset. In addition, recent studies have ex-
plored the potential of knowledge graphs in zero-shot
learning (Kampffmeyer et al., 2019; Nayak and Bach,
2022).
Graph Neural Networks. Graph Neural Networks
(GNNs) have become increasingly popular because
of their capacity to learn node embeddings that cap-
ture the graph’s structure (Kipf and Welling, 2016).
These networks have demonstrated significant ad-
vancements in downstream tasks like node classifica-
tion and graph classification (Hamilton et al., 2017;
Wu et al., 2019; Vashishth et al., 2020). Previ-
ous studies have primarily viewed transformers as a
means to learn meta-paths in heterogeneous graphs,
rather than a technique for neighborhood aggregation.
Additionally, GNNs have found applications in di-
verse areas, such as fine-grained entity typing (Xiong
et al., 2019), text classification (Yao et al., 2019), rein-
forcement learning (Adhikari et al., 2020), and neural
machine translation (Bastings et al., 2017). In our re-
search, we employ a Transformer-based Graph Con-
volutional Network (GCN) model, which has recently
been utilized in the context of zero-shot object classi-
fication (Nayak and Bach, 2022).
Common Sense Knowledge Graphs. Knowl-
edge Graphs (KGs) can encode auxiliary semantic
common-sense information through either a graph-
based schema or a knowledge graph embedding rep-
resented in vector form (Bosselut et al., 2019). This
important feature has recently attracted researchers to
investigate numerous open-access Knowledge Graphs
(KGs) that encompass universal information in con-
junction with large vision datasets. Those KGs can
serve as auxiliary knowledge in various vision-based
problems.
Visualsem is a large, multi-modal KG for vision
and language (Alberts et al., 2020) that incorporates
multilingual information and visually grounded re-
lations of entities, constructed using different pub-
licly available knowledge sources (e.g., Wikipedia,
ImageNet (Russakovsky et al., 2015), BabelNet
v4.0 (Navigli and Ponzetto, 2012)). The VisionKG
framework (Anh et al., 2021; Trung et al., 2021)
2
in-
tegrates labeled data across different, heterogeneous
sources and computer vision datasets, such as the
Visual Genome (Krishna et al., 2017), COCO, and
KITTI. In (Giuliari et al., 2022) a heterogeneous Spa-
tial Commonsense Graph is introduced for an effec-
tive integration between the commonsense knowledge
and the spatial scene to efficiently tackle the task of
graph-based object localization in partial scenes.
The CommonSense Knowledge Graph
(CSKG) (Ilievski et al., 2021) is a large-scale,
hyper-relational graph that combines seven popular
sources of semantic information into a consolidated
representation, such as: ConceptNet (Speer et al.,
2017), Visual Genome, Wikidata (Vrande
ˇ
ci
´
c and
Kr
¨
otzsch, 2014) and WordNet (Miller, 1995), among
others. It relies on the KGTK data model and file
specification. Overall, KGs have been extensively
employed successfully in various tasks including ob-
ject classification (Zhang et al., 2019; Kampffmeyer
et al., 2019; Xian et al., 2018a) and visual transfer
learning (Alam et al., 2022; Bhagavatula et al., 2019).
Large Pre-Trained Models. Large Pre-trained Mod-
els (LPMs) constitute a special type of Large Lan-
guage Models (LLMs) that exploit the idea of con-
trastive learning in order to achieve alignment be-
tween image and text. LPMs can be considered as
an adaptation of the LLMs, which consists on train-
ing on massive amounts of text data, to computer vi-
sion tasks. More in detail, the typical approach be-
hind LPMs is to train jointly an image encoder and a
text encoder on millions of image-text pairs collected
from internet. This allows the encoders to be able
2
https://github.com/cqels/vision
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
740

to perform well on downstream tasks such as Image
Captioning, Visual Question Answering and Zero-
Shot Classification. Some typical examples of LPMs
include CLIP (Radford et al., 2021), ALIGN (Jia
et al., 2021) and BLIP (Li et al., 2022).
Datasets. A set of publicly available image datasets
that are linked with KGs also contain rich annota-
tion data related to object states/attributes. Visual
Genome (Krishna et al., 2017) is a large-scale dataset,
particularly designed for tasks related to image clas-
sification and captioning, visual question answering
and object recognition, among others, containing over
100K images and rich visually grounded annotation
data for a wide variety of real-world scenarios. The
Visual-Attributes-in-the-Wild (VAW) dataset (Pham
et al., 2021)
3
is a large-scale image dataset pro-
viding explicitly positive and negative labels of vi-
sual object attributes related to appearance (color,
texture), geometry (shape, size, posture), and other
intrinsic object properties (state, action). Finally,
the Object State Detection Dataset (OSDD) (Gouidis
et al., 2022) provides more than 13K images and
19K annotations for 18 object categories and 9 state
classes, namely open, close, empty, containing some-
thing liquid (CL), containing something solid (CS),
plugged, unplugged, folded, and unfolded, based on
the something-something V2 video dataset (Goyal
et al., 2017).
3 METHODOLOGY
We formulate a ZSL approach for the task of
OSC in images inspired by works that address the
generalized ZS object or state classification prob-
lem(Kampffmeyer et al., 2019; Nayak and Bach,
2022; Gouidis et al., 2023). The main idea behind
this line of work is that given a set of seen classes,
the necessary information for the classification of the
unseen classes can be found in a Knowledge Graph
(KG), if processed appropriately by a Graph Convolu-
tional Network (GCN). We aim to tackle the ZS task
variation where the whole set of object state classes
is considered previously unseen. An overview of the
proposed approach is illustrated in Figure 2.
Let I
S
denote a collection of images for which an-
notation data related to a set O
S
of object-state classes
is available. We assume a visual object classifier that
is pre-trained according to a set of object classes O
C
.
Therefore, a visual feature vector v
c
∈ R of P dimen-
sions is available for each c ∈ O
C
. Moreover, a seman-
tic representation is available for each class s ∈ O
S
and
3
https://vawdataset.com/
c ∈ O
C
as a word embedding x ∈ R
D
of D dimensions,
based on a KG, noted as train-KG, that is supported
by the GloVe text model and word embeddings (Pen-
nington et al., 2014).
Based on this information, we define a set of train-
ing data points acquired by the train-KG, noted T
KG
=
(x
c
, c), each containing a word embedding x
c
for an
object class c ∈ O
C
, which is utilized for training a
Graph Convolutional Neural Network model. Finally,
we define a set of test data points as T
te
= {x
s
, s} that
are utilized to construct a task-specific KG, noted as
OS-KG, which encodes structured semantic represen-
tations of all classes in O
C
.
The goal of the proposed ZS-OSC approach is
to adapt the pre-trained visual object classifier (OC)
by leveraging the graph embeddings of the OS-KG
model to replace the former’s feature extraction layer.
This process enables the visual classifier to infer the
object state s ∈ O
S
in an image I
i
∈ I
S
, regardless of the
class c ∈ O
C
of the object that is present. We inves-
tigate different options related to the query node hop
distance, the size, and the relation types for construct-
ing the OS-KG and its role in achieving this goal, as
described in the following. We employ a CNN-based
classifier and assess its performance using as I
S
four
different datasets that provide annotation data for ob-
ject states in images.
3.1 The Proposed ZS-OSC Pipeline
The pipeline of the method (Figure 2), comprises four
stages:
1. Given a commonsense Knowledge Graph
4
and the
corresponding GloVe features (Nayak and Bach,
2022; Pennington et al., 2014), a GCN model is
trained to map its output word embeddings to the
visual embeddings of a pre-trained CNN-based
object classifier.
2. We construct a task-specific curated KG, noted
OS-KG, using queries related to the object state
classes O
S
.
3. We use the GCN model on the OS-KG to obtain
graph node embeddings for each class in O
S
.
4. The set of graph embeddings is used to replace
the feature extraction layer of the pre-trained OC,
which enables it to infer any object state class in
O
S
given an input image, regardless of the object
class represented.
This process enables generalizability and transfer
learning, adapting the visual object classifier as a vi-
sual object state classifier. Similar to (Nayak and
4
https://github.com/yinboc/DGP
Exploring the Impact of Knowledge Graphs on Zero-Shot Visual Object State Classification
741
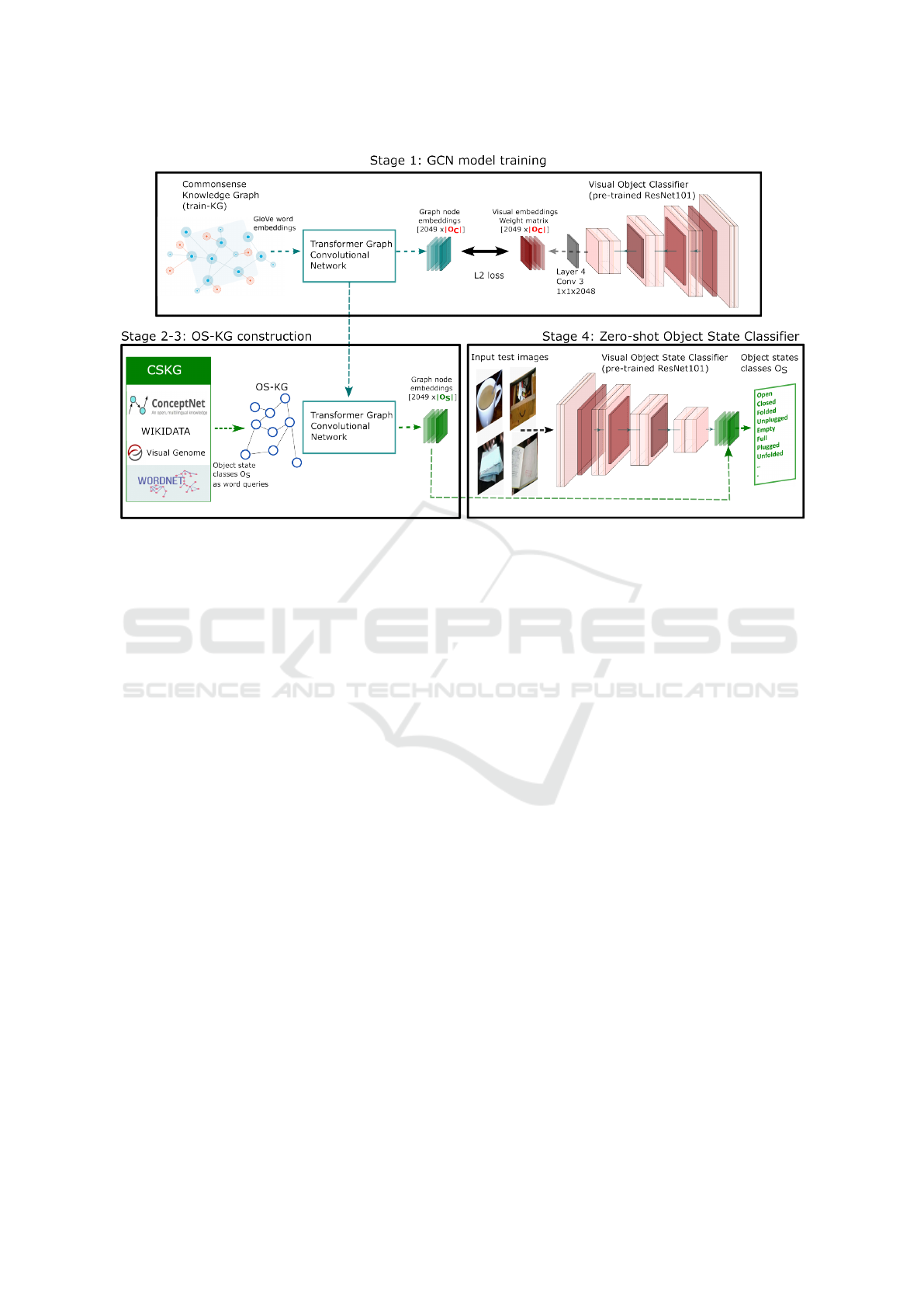
Figure 2: An overview of the proposed Zero-Shot Object State Classification approach.
Bach, 2022), we use the ConceptNet repository and
the GloVe model (Pennington et al., 2014) to obtain
word feature embedding vectors that are utilized for
the GCN model training (Stage-1). We utilize the
popular and effective ResNet101 model that is pre-
trained as an OC classifier using 1K target object
classes of the Imagenet (ILSVRC) dataset.
3.2 GCN Model Training
Graph Neural Networks are characterized by the ca-
pacity to encode the structure of a graph and the corre-
sponding relationships between its nodes. This char-
acteristic enables the learning of graph node embed-
dings by iterative aggregation of all k-hop neighbors
of each graph node (Hamilton et al., 2017). The
concept of Graph Convolutional Network model was
originally proposed in (Kipf and Welling, 2016). A
layer of a GCN implements two main functions (Xu
et al., 2019), aggregation and combination.
α
(l)
υ
= AGGREGATE
(l)
n
h
(l−1)
u
∀u ∈ N (υ)
o
(1)
In Equation 1, h
(l−1)
u
regards the node feature vector
for the neighborhood N of node υ, while α
(l)
υ
regards
aggregated node feature of the set of neighbors.
Any aggregated node is used as input to the fol-
lowing function to generate a node feature h
(l)
u
for the
l-th layer of the network model starting from an initial
GloVe word feature vector h
(0)
u
= x
υ
:
h
(l)
υ
= COMBINE
(l)
h
(l−1)
u
, α
(l)
υ
. (2)
We follow the 2-layer TrGCN model and
the graph propagation module that was proposed
in (Nayak and Bach, 2022). The ConceptNet (Speer
et al., 2017) is employed as the commonsense KG for
training the TrGCN model, as it best suits the formu-
lation of a ZSL framework for OSC using KGs.
We set the last layer of the GCN model to match
the dimensions of the CNN-based classifier’s features
extraction layer, that is a weight matrix [P × |O
C
|].
Each column comprises a set of weights that can be
interpreted as a class-specific object classifier. Con-
sequently, given a set T
KG
of semantic features
(e.g.GloVe) and graph topology information acquired
by the OS-KG as input, the GCN model training is
performed by minimizing the L2-distance classifica-
tion loss between the weights of the semantic repre-
sentations of the KG structure and the visual object
classifier’s weights. The train-KG combines seman-
tic information for the classes of both sets of object
classes O
C
and object state classes O
S
, as nodes, and
their relationships as weighted edges, which is a key
aspect of the proposed methodology. By using the
features of the pre-trained CNN-based classifier for
supervision, the GCN model is trained to generate
graph embeddings using the train-KG, which implic-
itly encodes their relationships and embeds those into
the visual feature space of the classifier.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
742
Table 1: Type of data contained in the sources utilized for
the construction of OS-KGs. CS: Common Sense. LX: Lex-
icographic. TH: Thesaurus. LD: Linked Data. AR: Affor-
dance Related. IS: Image-Centric. SU: Scene Understand-
ing LG: Logical.
KG Relation Types
ConceptNet (CN) CS, LX
WordNet (WN) LX, TH
Wikidata (WK) AR, LD
Visual Genome (VG) IS, SU
CSKG CS, LX, TH, LD, IS, SU, LG
3.3 KG Construction and Zero-Shot
State Classification
For each object state class c ∈ O
S
we query the reposi-
tory containing the topological and semantic informa-
tion and retrieve a sub-graph that comprises the corre-
sponding graph node, its k-hop neighborhood nodes,
where k = 1, 2, 3. Each retrieved sub-graph is inte-
grated into the corresponding OS-KG, while identical
nodes are merged. The GCN that was trained in the
previous stage is then utilized to obtain the graph em-
beddings for the OS-KG, which constitutes a d × |S|
weight matrix and is used to replace the feature ex-
traction layer of the CNN classifier.
For example, using the state class open as a query
for k = 1 in Visual Genome, yields a large sub-graph
with several nodes, e.g., bottle, box, newspaper, book,
jar and laptop. It should be noted that the queries
employed consider the existence of a relation and not
its type. The query concerns whether two concepts
are connected by any relation. In case those are con-
nected, the corresponding nodes should also be con-
nected in the sub-graph.
At inference time, a test image I
i
is used as input
to the adapted CNN classifier that is now able to esti-
mate a visual feature vector for each object state class
c ∈ O
C
. The minimum L2 distance between the esti-
mated visual features and the graph embedding f
s
is
calculated to finally classify the state of the object that
is present in I
i
, regardless of its object class.
The visual classifier demonstrates versatility, be-
ing capable of classifying the object state classes.
This makes it suitable for zero-shot classification sce-
narios, extending its usability beyond traditional set-
tings toward real-world applications and scenarios.
4 EXPERIMENTAL EVALUATION
We conducted a series of experiments to investigate
the impact of the KG on the performance of our
model. We construct several KGs, and each of them
Table 2: The size and the relation types of each graph vari-
ant of OS-KG (rows) are reported. Each variant OS-KG
has been constructed using a single or a combination of the
available knowledge sources (CN: ConceptNet, VG:Visual
Genome, WN:WordNet, WK:Wikidata, CSKG: Common-
sense Knowledge Graph). H: Hop distance taken to con-
struct the KG, Size of KGs. N: Number of Nodes. E: Num-
ber of Edges. RT: Number of Different Relation Types.
KG H N E RT
1 821 1666 20
CN
2 27233 197950 39
3 258603 6394846 47
1 1018 2292 34
VG
2 14562 211974 6528
3 25465 1851510 11811
1 821 1,666 20
CN,WK
2 27,233 197,950 39
3 25,8603 6,394,846 47
1 1,018 2,292 34
VG,WK
2 14,511 209,190 6,496
3 25,412 1,820,490 11,820
1 1,031 2,314 35
VG,WN
2 16,749 229,222 6,500
3 35,967 2,367,130 11,835
1 1,834 3,958 53
CN,VG,WK
2 44,629 434,302 6,535
3 300,426 9,184,186 12,046
1 1,031 2,314 35
VG,WK,WN
2 16,749 229,222 6,500
3 35,967 2,367,130 11,835
1 1,845 3,980 53
CN,VG,WN
2 44,693 434,804 6,537
3 300,867 9,200,084 12,048
1 1,845 3,980 53
CN,VG,WK,WN
2 44,693 434,804 6,537
3 300,867 9,200,084 12,048
1 3,160 6,974 60
CSKG
2 103,391 993,782 6,560
3 600,457 24,738,974 12,070
is experimentally assessed in our framework. The
differences among the KGs refer to the source(s) to
retrieve information and also to the hop node depth.
Regarding the sources, we utilize 5 popular repos-
itories and KG: ConceptNet (Speer et al., 2017),
WordNet (Fellbaum, 2010), Wikidata (Vrande
ˇ
ci
´
c and
Kr
¨
otzsch, 2014),Visual Genome (Krishna et al., 2017)
and CSKG (Ilievski et al., 2021). We also employ
three depth levels for node search: hop k=1 to 3.
Regarding the knowledge sources utilized, infor-
mation that is worthy of remark follows. ConceptNet
offers a wide array of relational knowledge, captur-
ing meaningful connections between various concepts
extracted from a vast range of data sources. Word-
Net is a lexical database that contributes an exten-
sive set of synsets, representing word meanings and
their associations, thus bolstering the semantic depth
of our KG. Wikidata, as a knowledge base of struc-
tured data, provides rich information about entities,
Exploring the Impact of Knowledge Graphs on Zero-Shot Visual Object State Classification
743

attributes, and their interconnections, thereby enhanc-
ing the KG with structured and linked data. Visual
Genome and Common Sense Knowledge Graph add
a multimodal dimension to our knowledge representa-
tion. Visual Genome, as a rich image-centric dataset,
augments the KG with visual concepts and spatial re-
lations extracted from images, bridging the gap be-
tween visual and textual knowledge. The Common
Sense Knowledge Graph (CSKG) provides structured
knowledge representation that captures general and
domain-agnostic knowledge about the world incor-
porating all the aforementioned knowledge sources,
among others, into a large-scale knowledge reposi-
tory. Overall, we conducted experiments using 30 KG
variants generated based on different combinations of
sources and node search depths/hops. The details re-
garding the KGs are shown in Table 1 and Table 2.
4.1 Implementation & Evaluation
Issues
Implementation Details. We employ the ImageNet-
based KG (Kampffmeyer et al., 2019)
5
as the train-
KG model. The GCN model was trained from scratch
following the methodology outlined in (Giuliari et al.,
2022) and in (Nayak and Bach, 2022). The training
process involved 1000 epochs using 950 randomly
selected classes from the ImageNet (ILSVRC 2012)
dataset (Russakovsky et al., 2015), while the remain-
ing 50 classes were reserved for validation. The GCN
model with the lowest validation loss was selected to
generate embeddings for both object and object state
classes using the test KG.
Datasets. Except for the OSDD dataset (Gouidis
et al., 2022), which is specifically designed for state
detection, there is no other dataset that focuses ex-
clusively on object states in images, at this moment.
However, some existing object detection and classi-
fication datasets include object states as a subset of
their object classes. These include the Visual At-
tributes in the Wild (VAW) dataset (Pham et al., 2021)
that includes object state classes as a subset of at-
tribute annotations. Likewise, MIT-States (Isola et al.,
2015) and CGQA-States (Mancini et al., 2022) are
two widely used datasets used in the context of at-
tribute classification. To leverage VAW, MIT-States,
and CGQA-States for our experimental evaluation,
we extracted subsets that specifically pertain to ob-
ject states. Additionally, for the OSDD and VAW
datasets, we extracted the bounding boxes from the
original images to create suitable images for the OSC
task. A simple analysis that reveals the complexity of
5
Publicly available at https://github.com/yinboc/DGP.
each dataset is to consider (i) the number of the tar-
get state classes and (ii) the average number of states
per object class (a higher ratio typically corresponds
to greater complexity), as reported in Table 3.
Metrics. Our evaluation protocol adheres to the stan-
dard zero-shot evaluation method as described in (Pu-
rushwalkam et al., 2019). In contrast to the standard
setting where the accuracy over all classes is reported,
in this case after the accuracy for each class is com-
puted, an overall mean average across the previous
results is reported. This approach treats each class
equally since it does not take into account the corre-
sponding number of samples of each class.
Competing Methods. To our knowledge, currently
there is no object-agnostic state model that can be
used off-the-shelf in the context of zero-shot setting.
Therefore we opt to use three SoA LPMs: CLIP (Rad-
ford et al., 2021), ALIGN (Jia et al., 2021) and
BLIP (Li et al., 2022), which support this functional-
ity. Overall, we experiment with two version of CLIP
and one version of ALIGN and BLIP respectively. It
should be noticed that all of these models violate indi-
rectly the basic assumptions of zero-shot setting since
the pairs of text and images that have been used for
the training contain the target classes for our task.
4.2 Results
Table 4 presents a comprehensive evaluation of var-
ious Knowledge Graphs (KGs) and language-vision
models across four different image datasets that are
either designed for the task of object state classifica-
tion or include augmented annotation data related to
object states. Regarding the models of 1 hop, C-WK-
WN and CN-WN perform best in OSDD, VG variant
excels in the CGQA-states and VAW dataset, while
the CN-VG-WN model achieves the highest perfor-
mance in the MIT-States. Concerning the model con-
structed using 2 hops, C-VG-WN achieves the high-
est performance in the OSDD and the MIT-States,
while VG exhibits the top performance in CGQA-
states. Finally, in the case of the 3 hops, C-WK-WN
and CN-WN are the best variants in OSDD, VG-WN
and VG-WK-WN are the best variants in CGQA-
States, CN-VG and CN-VG-WK are the best vari-
ants in MIT-States and VG is the best model in the
VAW respectively. Overall, the VG exhibits the best
performance with 4 top performances across the 12
comparisons (4 different datasets × 3 different hops).
A closer examination of these outcomes reveals
that models constructed using the same KG for depth
of hop k = 1 hop or k = 2 outperform those con-
structed using k = 3 in most cases. This observa-
tion suggests that further augmenting the KG beyond
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
744
Table 3: We report details on the four image datasets utilized in this work. Train/Val/Test: Number of Training/Valida-
tion/Testing Images. States: Number of State classes, Objects: Number of Object classes. VOSC/TOSC: Valid/Total Object-
State combinations. S\O: Average number of states than an Object can be situated in.
Dataset Train Val Test States Objects VOSC TOSC S\O
OSDD (Gouidis et al., 2022) 6,977 1,124 5,275 9 14 35 126 2.36
CGQA-states (Mancini et al., 2022) 244 46 806 5 17 41 75 1.71
MIT-states (Isola et al., 2015) 170 34 274 5 14 20 70 1.57
VAW (Pham et al., 2021) 2,752 516 1,584 9 23 51 207 2.61
Table 4: Experimental results of the proposed approach for the zero-shot object state classification task. The reported scores
summarize the average accuracy scores (columns) in the form of triplets for the hop-1 / hop-2 / hop-3 node depth/distance op-
tions for each dataset (columns). Each row represents the performance obtained by using a different OS-KG model that is man-
ually constructed using the combination of the reported knowledge sources. Additionally, the performance of vision-language
models is reported as well as that of a supervised visual state classification model, as reference. The latter relies on the ResNet-
101 network model that is trained in a fully supervised setting on each dataset separately. VG: Visual Genome-based model.
CN: ConceptNet-based model. WN: WordNet-based model. WK: Wikidata-based model. CSKG: Common-sense Knowledge
Graph-based model (incorporates all other knowledge sources). The performance for four datasets, OSDD (Gouidis et al.,
2022), CGQA-States (Naeem et al., 2021), MIT-States (Isola et al., 2015), VAW (Pham et al., 2021), is reported. Bold and
underlined scores indicate the best performance across category and among all methods, respectively.
Knowledge Graph/Model OSDD CGQA-States MIT-States VAW
CN-VG-WK-WN 28.3 / 28.4 / 26.4 42.7 / 42.0 / 41.0 39.3 / 39.4 / 33.0 22.4 / 22.6 / 18.8
CN-VG-WK 25.7 / 25.6 / 26.4 42.4 / 43.6 / 40.0 34.7 / 34.8 / 36.0 21.1 / 21.0 / 18.3
CN-VG-WN 28.3 / 28.4 / 26.4 42.7 / 42.0 / 41.0 39.3 / 39.4 / 33.0 22.4 / 22.5 / 18.8
CN-VG 25.7 / 25.6 / 24.4 42.4 / 43.6 / 40.0 34.7 / 34.8 / 36.0 21.1 / 21.0 / 18.3
CN 26.3 / 26.3 / 26.9 40.7 / 40.7 / 42.4 35.0 / 35.0 / 31.7 21.6 / 21.7 / 20.7
VG-WK-WN 29.1 / 27.2 / 27.6 43.3 / 43.8 / 42.8 36.2 / 38.2 / 35.7 23.9 / 23.5 / 22.7
VG-WK 26.9 / 27.3 / 25.2 46.7 / 47.4 / 37.2 38.6 / 39.3 / 34.2 25.4 / 23.9 / 24.9
VG-WN 29.1 / 27.2 / 27.6 43.3 / 43.8 / 42.8 36.2 / 38.2 / 35.7 24.0 / 23.4 / 22.7
VG 26.9 / 27.3 / 25.2 46.7 / 47.4 / 37.2 38.6 / 39.2 / 34.2 25.4 / 23.9 / 24.9
CSKG 28.3 / 28.1 / 26.0 40.0 / 40.0 / 44.0 38.1 / 38.1 / 35.5 21.5 / 24.4 / 21.9
CLIP-RN101 22.5 46.9 39.3 28.0
CLIP-VT16 28.8 44.9 46.4 30.1
ALIGN 29.5 40.0 44.2 28.4
BLIP 13.3 26.0 27.2 16.1
Supervised State Classifier 67.5 60.5 85.3 51.9
a certain size yields no additional benefits and may
introduce noise that deteriorates model performance.
Regarding the KG construction sources, most
of the top-performing models either include Visual
Genome (VG) or are based solely on it. These
models consistently rank among the top positions
across all datasets, demonstrating the robustness and
potential of this visual-centric dataset. Conversely,
models built using the greatest number of sources,
such as CSKG and VG-CN-WN-WK exhibit rather
mediocre performance, possibly due to overlapping
information and susceptibility to noisy data present
in these KGs. Likewise, the model based solely on
ConceptNet (CN) ranks as one of the worst models
across most of the comparisons. Finally, another in-
teresting finding concerns the fact the model consist-
ing of Visual Genome and ConceptNet, performs in
most cases worst than the corresponding models con-
sisting solely of either Visual Genome or ConceptNet.
Concerning the results obtained based on the
LPMs, the CLIP-VT16 exhibits the best performance
in MIT-States and VAW, CLIP-RN101 in CGQA-
States and ALIGN in OSDD respectively. Except for
the CGQA-states, the obtained results outperform the
results obtained by the top OS-KG models. However,
two important factors should be taken into consider-
ation. First, the considerably larger training set used
to train the visual backbones of LMPs that is orders
of magnitude greater in comparison to the amount
of the OS-KG models
6
. Moreover, LPMs have en-
6
CLIP was trained approximately on 4 × 10
8
images
and ALIGN on about 8 × 10
8
. The backbone of the OS-
KGs models used approximately 1 × 10
6
images.
Exploring the Impact of Knowledge Graphs on Zero-Shot Visual Object State Classification
745
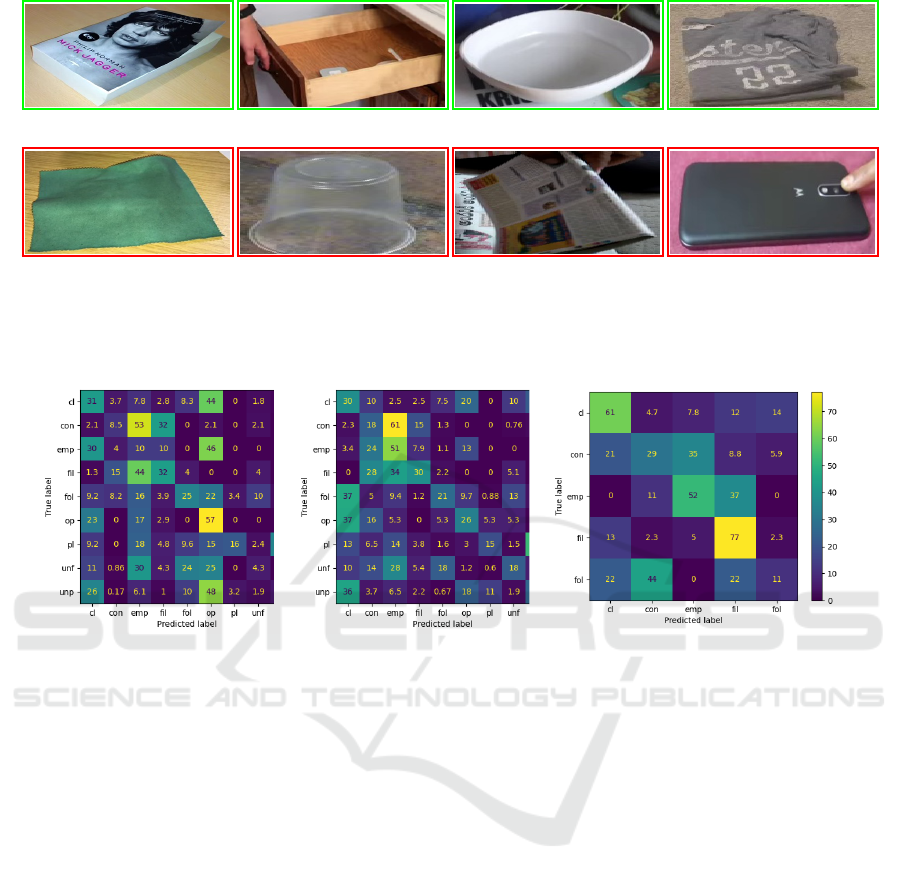
Closed (GT: Closed)
Open (GT: Open)
Filled (GT: Filled) Folded (GT: Folded)
Empty (GT: Unfolded) Filled (GT: Empty)
Open (GT: Folded)
Plugged (GT: Unplugged)
Figure 3: Qualitative results of the proposed ZS-OSC approach using images from the OSDD dataset. The VG-WN knowledge
sources is used to generate the OS-KG model in this case. For each sample image, the predicted object state class and the
ground truth class labels are noted. Both correct (top row) and incorrect (bottom row) predictions are illustrated.
OSDD VAW
CGQA-States
Figure 4: Confusion matrices of the model based on the VG-WN KG for OSDD, VAW and CGQA-states dataset. The
numbers reported are % percentages of correct predictions. (cl: Closed, con: Containing, emp: Empty, fil: Filled, fol: Folded,
op: Open, pl: Plugged, unf: Unfolded, unp: Unplugged).
countered during the training text-images pairs cor-
responding to the target classes. Finally, if we focus
on CLIP-RN101 which is the only LPM that uses the
same visual backbone as the OS-KG modes, we ob-
serve that it is outperformed by all OS-KG models in
the OSDD dataset and by two OS-KG models in the
CGQA-States dataset, respectively.
Based on these observations, it becomes evident
that a node inclusion policy, in addition to the hop
depth criterion, could enhance model performance.
Furthermore, a more sophisticated approach is nec-
essary to effectively combine different sources, con-
sidering information overlap and complementarity,
thereby mitigating noise and further improving model
accuracy and generalizability. These insights pave the
way for future research, aiming to optimize KG-based
models for zero-shot object state classification tasks.
A set of qualitative results is also illustrated in Fig-
ure 3, using the proposed ZS-OSC approach and the
VG-WN knowledge sources to generate the OS-KG
model. Both correct (top row) and incorrect (bot-
tom row) predictions are shown, revealing some of the
challenges an efficient solution to the OSC task has to
deal with. Estimating the object state class regardless
of the actual class/type of the object that is present
considerably hinders the performance of appearance-
based approaches that need to encode the large ap-
pearance variability of objects from different classes
that possibly share the same state class, i.e. open
drawer vs open bottle vs open door, and the subtle per-
ceptible changes in the appearance of similar objects
that constitute its current state, i.e. closed vs open bot-
tle. The appearance of objects or background image
content deteriorates the model’s performance, i.e. we
speculate that the human finger that appears to touch
the smartphone’s edge in the image of the last row
and column in Figure 3 resembling a cable, causes
the model to misclassify the object state as plugged,
while a transparent bowl placed upside-down is mis-
taken for a filled container.
Similar conclusions can be drawn by the exami-
nation of the confusion matrices of the different mod-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
746

(a)
(b)
Figure 5: t-SNE visualization of visual features extracted from images of the OSDD dataset. The visual features are generated
in (a) using the visual object classifier that is pre-trained on the ImageNet dataset and in (b) using the Supervised State
Classifier that has been fine-tuned on the dataset. Samples are illustrated in different colors to represent the nine target object
state classes of the OSDD dataset. Different marks are used to represent the fourteen object classes.
els, where it can be seen that the wrong predic-
tions correspond mainly to states related to the gt
state. In the case of the OSDD and VAW the related
states are grouped in 3 pairs (closed-open, folded-
unfolded, plugged-unplugged) and one triplet (empty-
containing-filled), while in the case of the OSDD and
VAW there is only the triplet of related states(empty-
containing-filled). The confusion matrices that are
produced by the model based on the VG-WN KG for
three datasets are shown in Figure 4.
Another aspect of the approach that merits high-
lighting is the contribution of the object classifier, the
weights of which are used by all but the last layer
of the RN101 classifier that is used for the ZS-OSC.
Specifically, the object classifier has been trained on
the 1000 classes of the ImageNet dataset and, there-
fore, the weights of these layers can be considered as
encapsulating the recognition of these object classes.
Those remarks can be further supported based
on observations of the t-SNE visualization (Van der
Maaten and Hinton, 2008) of the RN101 classifier
features illustrated in Figure 5. Features extracted
by two variants of the classifier were used (a) us-
ing the visual object classifier that is pre-trained on
the ImageNet dataset and in (b) using the Supervised
State Classifier that has been fine-tuned on the OSDD
dataset. In Figure 5a, the t-sne output reveals dis-
criminative clustering that is indicative of the groups
of target classes that have been overlaid using distinct
marks, as samples of the same object but different
state classes tend to lie closer in the feature space than
samples of the same state but different object class.
In Figure 5b, the fine tuning appears to improve sub-
stantially the clustering mitigating this issue suggest-
ing the important role of the object state classes.
5 CONCLUSIONS
In this study, we formulate a novel approach for the
zero-shot object state classification (ZS-OSC) task us-
ing Knowledge Graphs (KGs) and extensively evalu-
ate the effectiveness of various types of KGs. The
comparative evaluation is conducted on four bench-
mark datasets (Gouidis et al., 2022; Krishna et al.,
2017; Mancini et al., 2022; Pham et al., 2021). The
results reveal an optimal threshold to be sought re-
garding the number of KG nodes. Beyond this thresh-
old, including additional nodes leads to a decline in
model performance, highlighting the importance of
carefully selecting the KG size. Moreover, the type
of knowledge encoded in the KG has a crucial role, as
visually grounded semantic information appears more
suitable to efficiently represent features and complex
relations of semantic entities.
We argue that the zero-shot learning paradigm has
great potential in improving the state-of-the-art per-
formance for the OSC task by exploring intriguing
future steps to extend our presented work, such as (a)
fine-tuning of the GCN model using a visual classi-
fier for attribute classes or object-attributes pairs, (b)
integration of more powerful visual classifiers based
on transformer models and (b) more elaborate tech-
niques to construct visually grounded commonsense
KGs and to fuse rich semantic information in deep
neural models following the recent advancements of
the vision-language models.
Exploring the Impact of Knowledge Graphs on Zero-Shot Visual Object State Classification
747

ACKNOWLEDGEMENTS
The research project was supported by the Hellenic
Foundation for Research and Innovation (H.F.R.I.)
under the 3rd Call for H.F.R.I. Research Projects to
support Post-Doctoral Researchers (Project Number
7678 InterLinK: Visual Recognition and Anticipation
of Human-Object Interactions using Deep Learning,
Knowledge Graphs and Reasoning).
REFERENCES
Adhikari, A., Yuan, X., C
ˆ
ot
´
e, M.-A., Zelinka, M., Rondeau,
M.-A., Laroche, R., Poupart, P., Tang, J., Trischler,
A., and Hamilton, W. (2020). Learning dynamic be-
lief graphs to generalize on text-based games. NIPS,
33:3045–3057.
Alam, M., Buscaldi, D., Cochez, M., Osborne, F., Refor-
giato Recupero, D., Sack, H., Monka, S., Halilaj, L.,
Rettinger, A., Alam, M., Buscaldi, D., Cochez, M.,
Osborne, F., Refogiato Recupero, D., and Sack, H.
(2022). A survey on visual transfer learning using
knowledge graphs. Semant. Web, 13(3):477510.
Alberts, H., Huang, T., Deshpande, Y., Liu, Y., Cho, K.,
Vania, C., and Calixto, I. (2020). Visualsem: a high-
quality knowledge graph for vision and language.
arXiv preprint arXiv:2008.09150.
Anh, L.-T., Manh, N.-D., Jicheng, Y., Trung, K.-T., Man-
fred, H., and Danh, L.-P. (2021). Visionkg: Towards a
unified vision knowledge graph. In Proceedings of the
ISWC 2021 Posters & Demonstrations Track, Work-
shop Proceedings.
Bastings, J., Titov, I., Aziz, W., Marcheggiani, D., and
Sima’an, K. (2017). Graph convolutional encoders
for syntax-aware neural machine translation. arXiv
preprint arXiv:1704.04675.
Bhagavatula, C., Bras, R. L., Malaviya, C., Sakaguchi, K.,
Holtzman, A., Rashkin, H., Downey, D., Yih, S. W.-t.,
and Choi, Y. (2019). Abductive commonsense reason-
ing. arXiv preprint arXiv:1908.05739.
Bosselut, A., Rashkin, H., Sap, M., Malaviya, C., Celikyil-
maz, A., and Choi, Y. (2019). Comet: Commonsense
transformers for automatic knowledge graph construc-
tion. arXiv preprint arXiv:1906.05317.
Changpinyo, S., Chao, W.-L., Gong, B., and Sha, F. (2016).
Synthesized classifiers for zero-shot learning. In
Proceedings of the IEEE CVPR, pages 5327–5336.
Chen, J., Geng, Y., Chen, Z., Pan, J. Z., He, Y., Zhang,
W., Horrocks, I., and Chen, H. (2023). Zero-shot and
few-shot learning with knowledge graphs: A compre-
hensive survey. Proceedings of the IEEE.
Duan, K., Parikh, D., Crandall, D., and Grauman, K.
(2012). Discovering localized attributes for fine-
grained recognition. In 2012 IEEE CVPR, pages
3474–3481. IEEE.
Fellbaum, C. (2010). Wordnet. In Theory and applications
of ontology: computer applications, pages 231–243.
Springer.
Ghosh, P., Saini, N., Davis, L. S., and Shrivastava, A.
(2020). All about knowledge graphs for actions. arXiv
preprint arXiv:2008.12432.
Giuliari, F., Skenderi, G., Cristani, M., Wang, Y., and
Del Bue, A. (2022). Spatial commonsense graph for
object localisation in partial scenes. In Proceedings of
the IEEE/CVF CVPR, pages 19518–19527.
Gouidis, F., Patkos, T., Argyros, A., and Plexousakis, D.
(2022). Detecting object states vs detecting objects:
A new dataset and a quantitative experimental study.
In Proceedings of the 17th International Joint Con-
ference on Computer Vision, Imaging and Computer
Graphics Theory and Applications (VISAPP), vol-
ume 5, pages 590–600.
Gouidis, F., Patkos, T., Argyros, A., and Plexousakis, D.
(2023). Leveraging knowledge graphs for zero-shot
object-agnostic state classification. arXiv preprint
arXiv:2307.12179.
Goyal, R., Kahou, S., Michalski, V., Materzynska, J., West-
phal, S., Kim, H., Haenel, V., Fruend, I., Yianilos, P.,
Mueller-Freitag, M., Hoppe, F., Thurau, C., Bax, I.,
and Memisevic, R. (2017). The something something
video database for learning and evaluating visual com-
mon sense. In 2017 IEEE ICCV, pages 5843–5851,
Los Alamitos, CA, USA. IEEE Computer Society.
Hamilton, W., Ying, Z., and Leskovec, J. (2017). Inductive
representation learning on large graphs. NIPS, 30.
Ilievski, F., Szekely, P., and Zhang, B. (2021). Cskg: The
commonsense knowledge graph. Extended Semantic
Web Conference (ESWC).
Isola, P., Lim, J. J., and Adelson, E. H. (2015). Discov-
ering states and transformations in image collections.
Proceedings of the IEEE Computer Society CVPR,
07-12-June:1383–1391.
Jia, C., Yang, Y., Xia, Y., Chen, Y.-T., Parekh, Z., Pham,
H., Le, Q., Sung, Y.-H., Li, Z., and Duerig, T. (2021).
Scaling up visual and vision-language representation
learning with noisy text supervision. In ICML, pages
4904–4916. PMLR.
Kampffmeyer, M., Chen, Y., Liang, X., Wang, H.,
Zhang, Y., and Xing, E. P. (2019). Rethinking
knowledge graph propagation for zero-shot learning.
Proceedings of the IEEE Computer Society CVPR,
2019-June:11479–11488.
Kipf, T. N. and Welling, M. (2016). Semi-supervised clas-
sification with graph convolutional networks. arXiv
preprint arXiv:1609.02907.
Krishna, R., Zhu, Y., Groth, O., Johnson, J., Hata,
K., Kravitz, J., Chen, S., Kalantidis, Y., Li, L.-
J., Shamma, D. A., et al. (2017). Visual genome:
Connecting language and vision using crowdsourced
dense image annotations. IJCV, 123:32–73.
Lampert, C. H., Nickisch, H., and Harmeling, S. (2013).
Attribute-based classification for zero-shot visual ob-
ject categorization. IEEE Trans. on PAMI, 36(3):453–
465.
Li, J., Li, D., Xiong, C., and Hoi, S. (2022). Blip:
Bootstrapping language-image pre-training for uni-
fied vision-language understanding and generation. In
ICML, pages 12888–12900. PMLR.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
748

Mancini, M., Naeem, M. F., Xian, Y., and Akata, Z. (2022).
Learning Graph Embeddings for Open World Compo-
sitional Zero-Shot Learning. IEEE Trans. on PAMI,
8828(c):1–15.
Miller, G. A. (1995). Wordnet: a lexical database for en-
glish. Communications of the ACM, 38(11):39–41.
Monka, S., Halilaj, L., and Rettinger, A. (2022). A survey
on visual transfer learning using knowledge graphs.
Semantic Web, 13(3):477–510.
Naeem, M. F., Xian, Y., Tombari, F., and Akata, Z. (2021).
Learning graph embeddings for compositional zero-
shot learning. In Proceedings of the IEEE/CVF
CVPR, pages 953–962.
Narayan, S., Gupta, A., Khan, F. S., Snoek, C. G., and
Shao, L. (2020). Latent embedding feedback and dis-
criminative features for zero-shot classification. In
Computer Vision–ECCV 2020: 16th European Con-
ference, Glasgow, UK, August 23–28, 2020, Proceed-
ings, Part XXII 16, pages 479–495. Springer.
Navigli, R. and Ponzetto, S. P. (2012). Babelnet: The
automatic construction, evaluation and application
of a wide-coverage multilingual semantic network.
Artificial Intelligence, 193:217–250.
Nayak, N. V. and Bach, S. H. (2022). Zero-shot learning
with common sense knowledge graphs. Trans. on Ma-
chine Learning Research (TMLR).
Pennington, J., Socher, R., and Manning, C. D. (2014).
Glove: Global vectors for word representation. In
Proceedings of the 2014 conference on empirical
methods in natural language processing (EMNLP),
pages 1532–1543.
Pham, K., Kafle, K., Lin, Z., Ding, Z., Cohen, S., Tran,
Q., and Shrivastava, A. (2021). Learning to predict
visual attributes in the wild. In Proceedings of the
IEEE/CVF CVPR, pages 13018–13028.
Pourpanah, F., Abdar, M., Luo, Y., Zhou, X., Wang, R.,
Lim, C. P., Wang, X.-Z., and Wu, Q. M. J. (2023).
A review of generalized zero-shot learning methods.
IEEE Trans. on PAMI, 45(4):4051–4070.
Purushwalkam, S., Nickel, M., Gupta, A., and Ranzato,
M. (2019). Task-driven modular networks for zero-
shot compositional learning. In Proceedings of the
IEEE/CVF International Conference on Computer Vi-
sion, pages 3593–3602.
Radford, A., Kim, J. W., Hallacy, C., Ramesh, A., Goh, G.,
Agarwal, S., Sastry, G., Askell, A., Mishkin, P., Clark,
J., et al. (2021). Learning transferable visual models
from natural language supervision. In ICML, pages
8748–8763. PMLR.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S.,
Ma, S., Huang, Z., Karpathy, A., Khosla, A., Bern-
stein, M., et al. (2015). Imagenet large scale visual
recognition challenge. IJCV, 115:211–252.
Saini, N., Wang, H., Swaminathan, A., Jayasundara, V., He,
B., Gupta, K., and Shrivastava, A. (2023). Chop &
learn: Recognizing and generating object-state com-
positions. In Proceedings of the IEEE/CVF ICCV,
pages 20247–20258.
Singh, K. K. and Lee, Y. J. (2016). End-to-end localiza-
tion and ranking for relative attributes. In Computer
Vision–ECCV 2016: 14th European Conference, Am-
sterdam, The Netherlands, October 11-14, 2016, Pro-
ceedings, Part VI 14, pages 753–769. Springer.
Sou
ˇ
cek, T., Alayrac, J.-B., Miech, A., Laptev, I., and Sivic,
J. (2022). Multi-task learning of object state changes
from uncurated videos.
Speer, R., Chin, J., and Havasi, C. (2017). Conceptnet 5.5:
An open multilingual graph of general knowledge. In
Proceedings of the AAAI conference on artificial in-
telligence, volume 31.
Trung, K.-T., Anh, L.-T., Manh, N.-D., Jicheng, Y., and
Danh, L.-P. (2021). Fantastic data and how to query
them. In Proceedings of the NeurIPS 2021 Workshop
on Data-Centric AI, Workshop Proceedings.
Van der Maaten, L. and Hinton, G. (2008). Visualizing data
using t-sne. Journal of machine learning research,
9(11).
Vashishth, S., Sanyal, S., Nitin, V., and Talukdar, P.
(2020). Composition-based multi-relational graph
convolutional networks. In International Conference
on Learning Representations.
Vrande
ˇ
ci
´
c, D. and Kr
¨
otzsch, M. (2014). Wikidata: a free
collaborative knowledgebase. Communications of the
ACM, 57(10):78–85.
Wang, X., Ye, Y., and Gupta, A. (2018). Zero-Shot
Recognition via Semantic Embeddings and Knowl-
edge Graphs. Proceedings of the IEEE CVPR, pages
6857–6866.
Wu, F., Souza, A., Zhang, T., Fifty, C., Yu, T., and Wein-
berger, K. (2019). Simplifying graph convolutional
networks. In ICML, pages 6861–6871. PMLR.
Xian, Y., Lampert, C. H., Schiele, B., and Akata, Z. (2018a).
Zero-shot learninga comprehensive evaluation of the
good, the bad and the ugly. IEEE Trans. on PAMI,
41(9):2251–2265.
Xian, Y., Lampert, C. H., Schiele, B., and Akata, Z. (2019).
Zero-shot learninga comprehensive evaluation of the
good, the bad and the ugly. IEEE Trans. on Pattern
Analysis & Machine Intelligence, 41(09):2251–
2265.
Xian, Y., Lorenz, T., Schiele, B., and Akata, Z. (2018b).
Feature generating networks for zero-shot learning.
pages 5542–5551.
Xiong, W., Wu, J., Lei, D., Yu, M., Chang, S., Guo, X.,
and Wang, W. Y. (2019). Imposing label-relational in-
ductive bias for extremely fine-grained entity typing.
arXiv preprint arXiv:1903.02591.
Xu, K., Hu, W., Leskovec, J., and Jegelka, S. (2019). How
powerful are graph neural networks? In International
Conference on Learning Representations.
Yao, L., Mao, C., and Luo, Y. (2019). Graph convolu-
tional networks for text classification. In Proceedings
of the AAAI conference on artificial intelligence, vol-
ume 33, pages 7370–7377.
Zhang, C., Lyu, X., and Tang, Z. (2019). Tgg: Transferable
graph generation for zero-shot and few-shot learning.
In Proceedings of the 27th ACM International Confer-
ence on Multimedia, pages 1641–1649.
Zhou, L., Meng, X., Liu, Z., Wu, M., Gao, Z., and Wang, P.
(2023). Human pose-based estimation, tracking and
action recognition with deep learning: A survey.
Exploring the Impact of Knowledge Graphs on Zero-Shot Visual Object State Classification
749
