
Multi-Agent Deep Reinforcement Learning for Collaborative Task
Scheduling
Mali Imre Gergely
Faculty of Mathematics and Computer Science, Babes
,
-Bolyai University, Kog
˘
alniceanu Street, Cluj-Napoca, Romania
Keywords:
Multi-Agent Reinforcement Learning, Multi-Agent Systems, Resource Management, Task-Scheduling.
Abstract:
Efficient, scalable and cost-efficient resource management is a multi-faceted online decision making problem,
faced more and more in networking and cloud computing. More specifically, task-scheduling stands out as
a complex challenge, solving which is critical for the optimal functioning of today’s systems. Traditional
heuristic approaches to scheduling are laborious to design and especially difficult to tune, therefore various
machine-learning based methods have been proposed. Reinforcement Learning (RL) showed great results
in similar decision making problems, and many existing approaches employ RL to solve task scheduling
problems. Most of these works consider either single-agent scenarios (and thus suffer from scalability issues),
or the existing multi-agent applications are heavily specialised. We propose a general-purpose multi-agent
RL framework that can successfully learn collaborative optimal scheduling policies, making one step further
towards clouds and networks that are both scalable and autonomous. Our experiments show that these agents
can collaboratively learn optimal scheduling policies for dynamic workloads.
1 INTRODUCTION
Optimal resource management is a critical nuance
in the operation of various real-life systems such as
in logistics, computer networks, cloud-based appli-
cations, transportation, manufacturing. In particu-
lar, computer networks and cloud-based applications
have experienced an immense growth in popularity
recently. These systems typically must serve large
numbers of users, and must manage substantial vol-
umes of data and significant computational demands.
Effective task scheduling is a vital aspect of the opti-
mal functioning of these systems.
Task scheduling itself is a well-studied NP-
hard problem, which under certain formulations is
equivalent to the intensely scrutinized ”Job-Shop-
Scheduling” problem (Dauz
`
ere-P
´
er
`
es et al., 2023).
Efficient task-scheduling in computer networks en-
sures low makespan of tasks, thus achieving low la-
tency, high reliability and good performance. Classi-
cal approaches to task-scheduling generally use com-
plex hand-crafted heuristics that are not only tedious
to conceive and difficult to calibrate, they also lack
flexibility with respect to changes in the metrics of in-
terest and other aspects of the environment. To com-
bat this, RL-based solution proposals have been more
and more frequent, especially since DeepRM was in-
troduced (Mao et al., 2016).
While some approaches are directly implemented
for practical use in real-world cluster management
scenarios such as machine-learning clusters (Zhao
and Wu, 2021), a significant portion of existing stud-
ies approach these problems by developing and using
simulated environments (Mao et al., 2016; Fan et al.,
2022). These simulators and testbeds offer a control-
lable setting that ease the process of experimentation
with different algorithms and strategies, and allow for
more rigorous analysis of results. This can ultimately
be useful in developing efficient and robust solutions
that later can be incorporated into real clusters.
Many of the existing research considers a sin-
gle agent, generally handling task scheduling for an
entire cluster. The existing exceptions that employ
multi-agent methods (Zhao and Wu, 2021) are largely
situation-specific and are heavily intertwined with the
intricacies of the type of cluster or system they con-
sider, lacking generality. Single-agent approaches are
problematic since the growth in the number of ma-
chines/instances typically increases the action space
for RL-based approaches, making them more and
more inefficient as these systems scale.
This paper considers a novel approach that formu-
lates multi-resource, multi-machine and multi-agent
task scheduling as a collaborative Partially Observ-
1076
Gergely, M.
Multi-Agent Deep Reinforcement Learning for Collaborative Task Scheduling.
DOI: 10.5220/0012434700003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 3, pages 1076-1083
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

able Markov Game (POSG). However, we use an
implementation based on a novel pattern and pro-
vide a configurable environment based on the Agent-
Environment-Cycle (AEC) model (Terry et al., 2021).
Since AEC games are also proved to be equivalent to
POSG-s and Extensive Form Games (EFG), this ab-
straction is judicious.
We then apply Proximal Policy Optimization
(PPO) (Schulman et al., 2017) in a decentralised way
and experimentally prove that multiple homogeneous
independent RL agents can jointly learn comparable
to or better scheduling policies than heuristic-based
approaches. Additionally, we explore the effects of
local vs. global observations and rewards on perfor-
mance.
2 BACKGROUND
2.1 Multi-Agent Reinforcement
Learning
Reinforcement Learning is one of the main paradigms
of machine learning that models decision-making
problems as Markov Decision Processes and builds
on the idea of learning from interaction (Sutton and
Barto, 2018).
Formally, a Markov Decision Process can be char-
acterized as a tuple (S, A, P, R, γ), where S is the set of
possible states, A is the set of possible actions, P en-
capsulates the transition probabilities to describe the
dynamics of the environment, R is a reward function
and γ is called the discount factor that controls the
short- or farsightedness of the agent.
The agent interacts with the environment by ob-
serving at each timestep t a state s
t
(or a local obser-
vation o
t
in partially observable settings), based on
which it decides on action a
t
and sends it to the envi-
ronment. The environment then transitions to the next
state according to P, and the agent receives reward
r
t+1
and observes the next state s
t+1
. The agent’s goal
is to learn a policy π, according to which action selec-
tions are made in a way that maximises cumulative
rewards.
In multi-agent scenarios, each agent might have a
different set of actions, and might observe different
subsets of the state. What makes multi-agent scenar-
ios more challenging is that from the perspective of
each agent, the rest are part of the environment. Thus,
when multiple agents are learning at the same time,
the environment exposes an inherent non-stationarity.
Regarding RL methods, Proximal Policy Opti-
misation stands out as an advanced policy-gradient
method with a unique approach to the balance be-
tween exploitation and exploration. Unlike classical
methods, PPO optimises a clipped surrogate objec-
tive function. The clipping mechanism is central to
this approach as this effectively prevents the algo-
rithm from committing updates so large that would
change the policy acutely (thus the name ”proximal”).
The objective function can be written as follows:
L(θ) =
ˆ
E[min(r
t
(θ)
ˆ
A
t
, clip(r
t
(θ), 1 − ε, 1 + ε)
ˆ
A
t
)]
Here,
ˆ
A
t
is an approximator of the advantage func-
tion (Schulman et al., 2015), r
t
(θ) is the ratio between
the new and the old policy, and ε is a hyperparameter,
generally set to 0.2. The clip function modifies the
surrogate objective and prevents it from jumping out-
side of the interval [1 − ε, 1 + ε].
PPO has gained immense popularity due to its
simplicity, applicability and effectiveness in various
scenarios, from chip design (Mirhoseini et al., 2021)
to robotics (OpenAI et al., 2018). Furthermore, PPO
has proved to be surprisingly effective in cooperative
multi-agent games, (Yu et al., 2022) which further
validates our idea to apply multi-agent PPO to task
scheduling. To our best knowledge however, this has
not yet been done in the literature for this particular
problem in a multi-agent setting.
2.2 Agent Environment Cycle Games
Due to recent advances, RL has gained wide recog-
nition and popularity, especially in the field of games
and game theory (Silver et al., 2017). This has led
to the development of tools, frameworks and libraries
such as OpenAI gym (Brockman et al., 2016), Open-
Spiel (Lanctot et al., 2019), and PettingZoo along
with the Agent Environment Cycle (AEC) model
(Terry et al., 2021). These tools prove to be useful
in rigorous modeling and experimentation in RL, and
are applicable to scheduling simulators as well.
Among these, the AEC model and the correspond-
ing library, PettingZoo stand out in that it successfully
addresses common errors and provides clearer attri-
bution of rewards by providing a more conceptually
consistent approach. Agents in the AEC model re-
ceive observations, take actions, and receive rewards
sequentially, which mirrors the sequential nature of
decision-making in most real-world scenarios. This
approach not only simplifies the attribution of re-
wards and actions but also implicitly prevents the in-
troduction of race conditions, frequently encountered
in models where agent actions are committed simulta-
neously. Moreover, AEC games are also proved to be
Multi-Agent Deep Reinforcement Learning for Collaborative Task Scheduling
1077

equivalent to POSG games, which makes the model
widely applicable.
Formally, AEC games can be characterized
as a tuple containing (S, s
0
, N, (A
i
)
i∈[N]
, (T
i
)
i∈[N]
, P,
(R
i
)
i∈[N]
, (Ω
i
)
i∈[N]
, (O
i
)
i∈[N]
, v), where:
• S is the set of states, s
0
is the initial state.
• N is the number of agents. Typically, agents are
numbered from 1 to N, and the environment agent
is denoted with 0.
• A
i
is the set of actions for agent i. For conve-
nience, A
0
is generally set to be void.
• T
i
is a state transition function for agent i, while P
is the transition function for the environment.
• R
i
is the set of possible rewards for agent i.
• Ω
i
is the set of possible observations for agent i,
while O
i
is the observation function.
• v is a special function that computes the next agent
in the agent environment cycle.
Under this formulation, games start in state s
0
.
The first agent to act is the environment agent, after
which the game continues in turns, agents receive an
observation ω
i
, and choose action a
i
. Then the game
transitions deterministically to the next state accord-
ing to T
i
. When i = 0, a stochastic transition according
to P happens. Agents are taking their turns in order
defined by v. Analogously, at every step agents re-
ceive a partial reward r
i
which are aggregated at the
end of each cycle. This model allows for turn-based
as well as for synchronous games.
For our purposes, the AEC game will mean that
each scheduler agent will take turn in choosing tasks
to schedule, after which the environment agent will
transition to the next timestep. This ensures that all
agents have their inner clocks synchronized and we
avoid the necessity of complex time synchronization
mechanisms.
2.3 Task Scheduling
Efficient task scheduling has a pivotal role in optimiz-
ing resource utilization and maintaining high quality
of service, upholding service-level agreements and
meeting user requirements. These aspects play an
increasingly important role in environments experi-
encing fluctuating workloads and changing priorities.
The task scheduling problem is generally framed in
terms of the following components:
1. jobs, which are waiting to be processed. Jobs of-
ten have known resource profiles
2. machines, which process jobs according to their
resource constraints, and can only process tasks
that fit within their resource constraints
3. processing time
4. schedule, which is a plan detailing which tasks to
be processed on which machines at what times
5. scheduler, the entity that finds a schedule
6. objective, typically the minimisation of some
metric like job slowdown, makespan, etc.
Under this formulation, our goal is to come up with
a set of RL-based scheduler agents, each handling a
subset of machines of a cluster, concurrently and col-
laboratively finding scheduling plans that are optimal
under dynamic workloads.
3 RELATED WORK
The field of resource management has gained signif-
icant attention, focusing particularly on task schedul-
ing in cloud environments, as well as job-shop
scheduling challenges. Reinforcement learning has
served as a key technique in recent advancements
(Wang et al., 2022; Liu et al., 2020).
DRAS (Fan et al., 2022) aims to solve the prob-
lem of task scheduling, specialised in High Perfor-
mance Computing (HPC) networks. The authors also
provide a gym-like simulation environment for train-
ing called CQGym. They present multiple single-
agent RL methods including Deep Q-Learning, A2C,
Vanilla Policy-Gradient and PPO, and evaluate them
on real HPC cluster traces. Their experiments show
the PPO scheduler agent to perform the best.
The work of Tassel et al. also comes close to ours
(Tassel et al., 2021) in that it both addresses job-shop
scheduling, and employs PPO, but only considers a
single-agent scenario. Instead of randomly generated
data, this work considers benchmark datasets instead.
Another recent study (Zhu et al., 2023) presents
a double-deep Q-network based Multi-Agent Rein-
forcement Learning (MARL) approach to solve real-
time scheduling in a robot-assisted flexible job shop,
using centralized training and decentralized execu-
tion on job sequencing, process planning and machine
selection in a simulated environment. Their results
show improvements up to 50% as compared to heuris-
tics. Another popular approach to job-scheduling
with MARL is using homogeneous agents and Graph
Neural Networks to harness topology-awareness in
large clusters (Zhao and Wu, 2021).
DeepMAG (Zhang et al., 2023) applies a Deep Q-
Network based cooperative multi-agent method, op-
erating over a multi-agent graph based on interop-
eration relationships between machines. While this
work addresses manufacturing settings primarily, it
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
1078
also comes close to our approach as the problem of
cooperation is directly addressed.
DeepRM and DeepRM 2 (Mao et al., 2016; Ye
et al., 2018) are the most prominent works in the area
of task scheduling with RL, one of their most signif-
icant contribution being a flexible, intuitive and ex-
tensible simulation environment, on which our envi-
ronment is based as well. DeepRM first demonstrated
the efficacy of RL methods over traditional heuristics.
It is also the first approach that employs Policy Gra-
dient methods, having used the REINFORCE algo-
rithm (Sutton et al., 1999). While other works base
their simulation environment on the one described in
DeepRM as well, including the extension to multiple
machines (Paduraru et al., 2023), to our best knowl-
edge ours is the first one to extend it to the multi-agent
setting.
4 DESIGN
This section elaborates on the design of the main com-
ponents of our approach, including the environment,
agents and rewards.
4.1 Environment
We describe the simulation environment provided,
along with the evaluation methods and bases of com-
parison, highlighting similarities and differences be-
tween our approach and existing ones. Inspired by
DeepRM, we provide a simulation environment that
models a multi-machine and multi-resource cluster.
Resources, job slots and the backlog are modeled
equivalently to DeepRM. Each machine has multi-
ple types of resources. Then, tasks are arriving to
a fixed number of slots, from which the scheduler
agents choose candidates to allocate. Once a job has
been allocated, it’s moved to the afferent machine’s
running jobs, its resources are marked as used, and
the job is eliminated from the job slots.
New jobs are arriving with a frequency accord-
ing to a Bernoulli process. The resource demands
and time lengths of the jobs are chosen randomly ac-
cording to a pre-computed expected load/stress factor.
Newly arriving jobs are placed in one of the available
job slots. If none is available, the new job is added to
the backlog, from which jobs are placed into the slots
in a first-come first-served manner as soon as job slots
free up.
Additionally, we provide not only one, but mul-
tiple distinct machines within the cluster. These ma-
chines are partitioned evenly across the agents, each
agent being responsible for scheduling tasks on their
machines. Handling not only one but possibly multi-
ple machines by one agent further increases the gener-
ality of our simulator. Our experiments only consider
homogeneous agents, meaning each handles the same
number of machines of the same number of resources,
capacities and having identical time horizons.
Further, we encapsulate the aforementioned sys-
tem in an AEC environment for the MARL setup. The
usage of the AEC model is pivotal in this setting, since
this model disambiguates the possible conflicts aris-
ing between the agents from having a shared resource
pool, the job slots.
4.2 Agents
We follow a decentralized training and decentralized
execution pattern. We train a separate PPO model
for each agent. In each epoch, we choose one agent
and train it for one episode with the rest of the agents
fixed, then repeat for a number of episodes before pro-
ceeding to the next epoch.
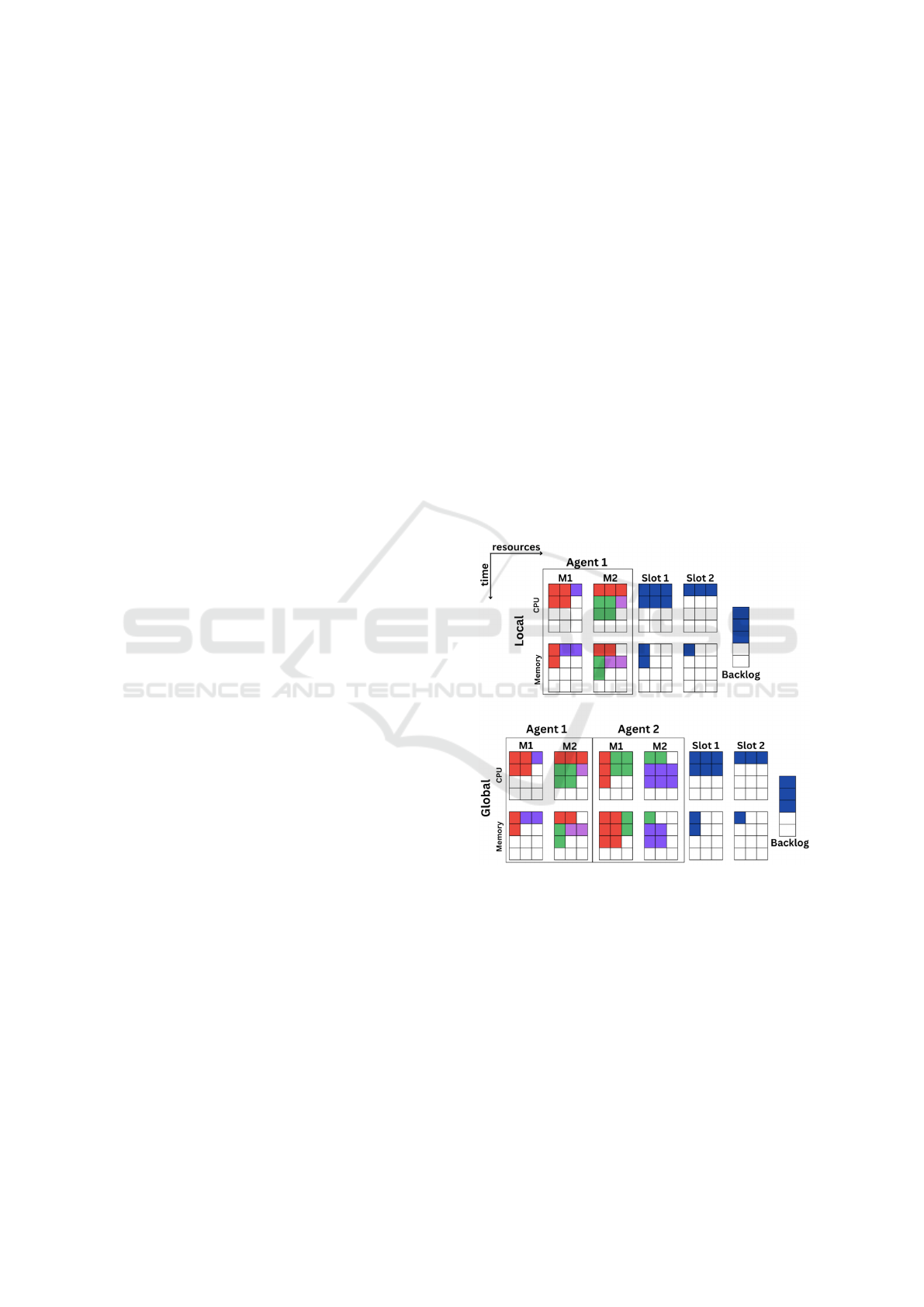
Figure 1: Sample cluster state with two resources, two
pending job slots, two machines, two machines per agent, a
time horizon of four discrete units and a maximum resource
capacity of three units. The top row shows a possible lo-
cal observation for Agent 1, while the bottom row contains
the full global state. The job slot and backlog are shared
between both.
The actions of the agents consist of numbers be-
tween 0 and NxM, where N is the number of machines
per agent, and M is the size of the job slots. Having
action a, the scheduler will allocate the job having in-
dex a mod M in the job slot to machine with index
a ÷ M of the scheduler. This effectively reduces the
action space for agents, since a single-agent approach
Multi-Agent Deep Reinforcement Learning for Collaborative Task Scheduling
1079

would require having to deal with NxMxK actions,
where K is the total number of agents (having NxK
machines in the system).
Having multiple agents also has the additional
possibility of reduced observation spaces. Our state
representation is similar to DeepRM in that we use
images to describe the current cluster state. The cur-
rent state of the environment can be described by the
job allocation statuses of each machine for each re-
source, the resource demands of the first M waiting
jobs (the job slot) and the number of waiting jobs in
the queue. When using local observations, each agent
will only observe the state of its own machines and
their job allocations, along with seeing the resource
profiles of the M jobs in the job slot. It is also im-
portant to note that since the job slots and backlog are
shared among all agents, this part of the observation is
common to all. De-facto locality of the observations
is attributable to each agent only observing its own
machines. Figure 1 shows examples of global state
and local observation.
4.3 Data
We simulate job arrivals according to a Bernoulli pro-
cess. Jobs are generated in the following way: short,
and long jobs, where short jobs have a time length
between L
sl
= 1 and L
su
=
1
2
H, where H is the time
horizon, while long jobs have a time length between
L
ll
=
2
3
H and L
lu
= H. Jobs are taken to be short
or long with a probability p
long
. Further, jobs have
a dominant resource and a recessive one, which are
chosen at random. The dominant resource demands
are chosen randomly between D
dl
=
1
2
C and D
du=
C,
where C is the maximum resource capacity, while
non-dominant resource demands are chosen between
D
rl
= 1 and D
ru
1
2
C. The expected job length then can
be computed as follows:
ˆ
E[Length] = (1 − p
long
)
L
su
+ L
sl
2
+ p
long
L
lu
+ L
ll
2
Analogously, in a system with two resources, the
expected resource demand for resource r, D(r) can be
computed as:
ˆ
E[D(r)] = p
dom
D
du
+ D
dl
2
+ (1 − p
dom
)
D
ru
+ D
rl
2
Here, p
dom
is the probability of a resource being
dominant, and the expected load on resource r on one
machine then can be computed as:
ˆ
E[Load(r)] = q
2
ˆ
E[D(r)]
ˆ
E[Length]
B
r
Here, B
r
is the number of maximum available re-
source units for resource r, and q is the job arrival rate.
Note however, that the job arrival rate is raised to the
second power. This is due to the fact that whenever a
job arrives, its demands and length are independently
generated, and both depend on the job arrival rate.
Another important detail to note is that this formula
gives the expected load for one machine. To compute
the total expected load on the system for a certain re-
source,
ˆ
E[Load(r)] can be further divided by the total
number of machines in the system. Using this for-
mula we craft data and tweak the job arrival rate such
that the expected total load varies from 10% to 120%.
4.4 Rewards
The flexibility of RL schedulers lies in the fact that
they can be trained for multiple objectives. For each
individual agent, we use a generic reward function
that can be parameterized for several objectives:
R
t
= α
∑
j∈A
1
T
j
+ β
∑
j∈B
1
T
j
+ γ
∑
j∈G
1
T
j
Here A is the set of jobs waiting in the job slot al-
ready, B is the set of jobs in the backlog and G is the
set of jobs running on the machines under the current
agent’s management. This set can be further extended
to all machines in the system, which will control the
locality or globality of the rewards. Intuitively, this
means that an agent will either receive penalties for
the delays on its own machines, or it will be penal-
ized for all. α, β and γ are hyperparameters, generally
taken to be negative. In our experiments, we consider
α = β = γ = −1. The generality of this reward scheme
allows for multiple different objectives.
5 EXPERIMENTS
Our experiments employ PPO in a decentralized
multi-agent setting to the problem of task scheduling
in a DeepRM-like simulator. A PyTorch-based PPO
implementation is used for the agents, and the envi-
ronment is provided as a Python library with an AEC
interface. Our experiments are guided by the follow-
ing research questions:
• R1: Can independent PPO agents collaboratively
learn resource management solely from experi-
ence?
• R2: How does the locality and globality of re-
wards and observations influence performance?
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
1080
• R3: How does the joint policy of multiple inde-
pendent PPO agents compare to heuristics?
6 ENVIRONMENT PARAMETERS
Inspired by multiple works in the literature and the
parameters used in DeepRM and DeepMAG, the pa-
rameters chosen for the experiments in our environ-
ment are summarized in Table 1.
Table 1: Environment parameters.
Parameter Value
time horizon 20
job slot size 5
number of resources 2
resource capacity 10
backlog size 60
number of machines per agent 1,2
number of agents 2,3
6.1 Agent Parameters
Our agents use PPO to learn scheduling policies. The
sizes of state and action spaces are derived from the
environment parameters as described in Section 4.2.
Agents are uniform in size, values of parameters and
number of machines they handle. Table 2 summarizes
the relevant parameters used by each PPO agent.
Table 2: PPO Agent Parameters.
Parameter Value Description
learning rate 3 · 10
−3
batch size 64
γ 0.99 discount factor
gae-λ 0.95 bias-variance
tradeoff factor
(Schulman et al.,
2015)
clip-range 0.2 clipping parameter
for the surrogate
loss
entropy coeff. 0.0 Used in computing
the loss
value-function
coeff.
0.5
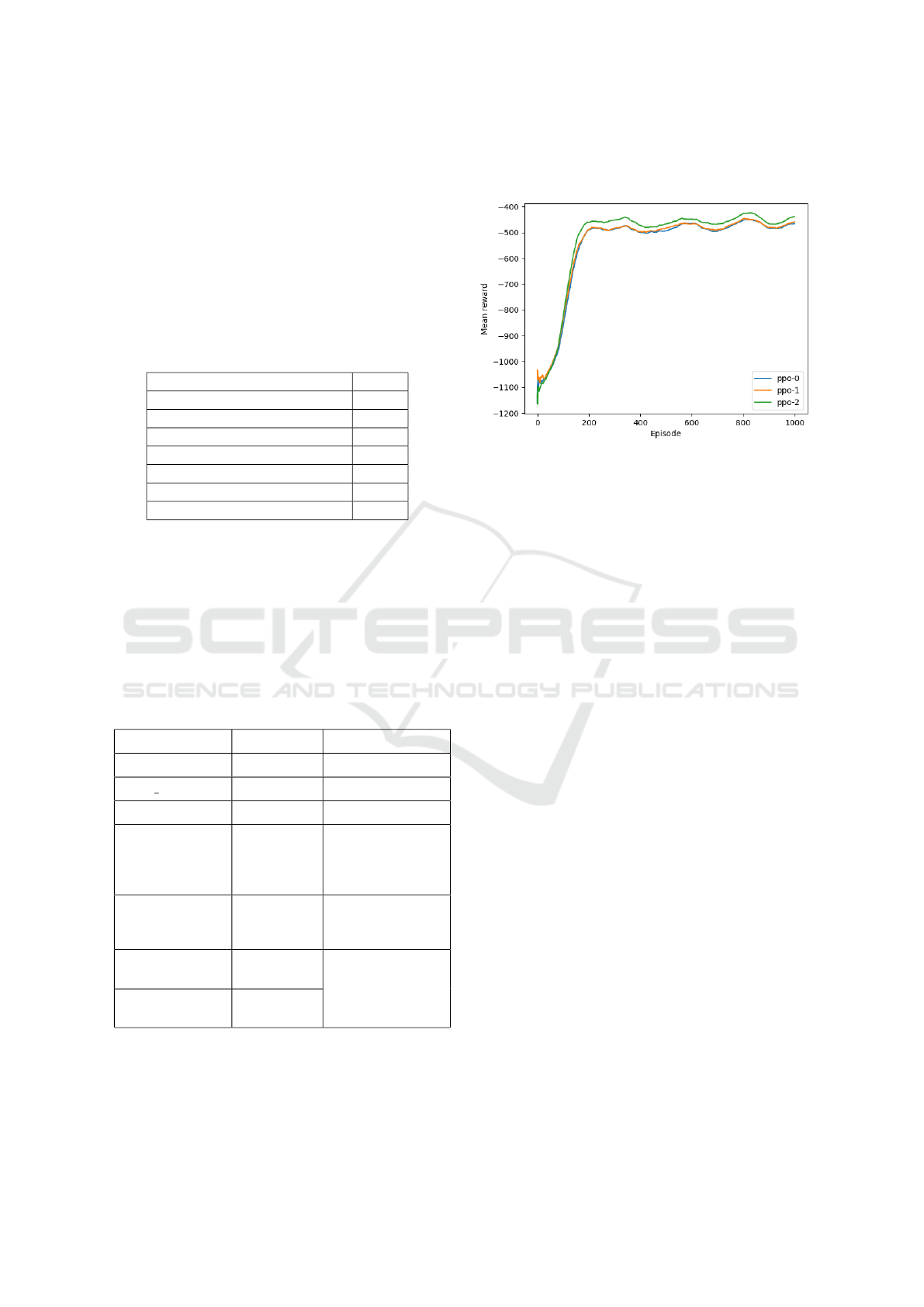
6.2 Results
To showcase the convergence of our agents, we show
the evolution of the episode mean reward as obtained
through time, when co-training multiple PPO agents
for job-slowdown.
Figure 2: Mean reward obtained over time by three PPO
agents, using global observations, global rewards and hav-
ing one machine per agent.
Figure 2 and 3 show the difference in convergence
and obtained reward when using global vs. local ob-
servations and rewards respectively. It is noticeable
how considering only local information introduces a
variance and slows down convergence. In contrast,
incorporating global information makes agents much
more homogeneous and speeds up convergence. The
difference between the absolute values of rewards be-
tween global vs local runs is expected, as global re-
ward means each agent’s reward contains the penal-
ties for all the other agents as well. This is also visible
in the fluctuations of the rewards after the policies sta-
bilised, as they are roughly aligned across all agents.
The reward values on Figure 2 are not equal across
agents due to the training procedure: only rewards
during the learning process are included. When one
agent is learning, the others are fixed for that episode
and their rewards do not contribute to the learning
curve. Analogously, in considering only local obser-
vations, the rewards fluctuate quite independently.
Further we explore the cumulative job slowdowns
for our agents, and compare it with heuristics. We
provide multi-machine generalisations of the SJF
(slowest job first), packer, and Tetris agents from
DeepRM. The original algorithm chooses a job to
schedule according to a score. Extending these algo-
rithms is however straightforward: the multi-machine
algorithm not only chooses the best job to allocate,
it also maximizes this score over the available ma-
chines.
For a fair comparison, we use the same number of
heuristic agents in each case. That is, the slowdown
of a system with three PPO agents is compared to the
slowdown of three Packer or Random agents, for ex-
Multi-Agent Deep Reinforcement Learning for Collaborative Task Scheduling
1081
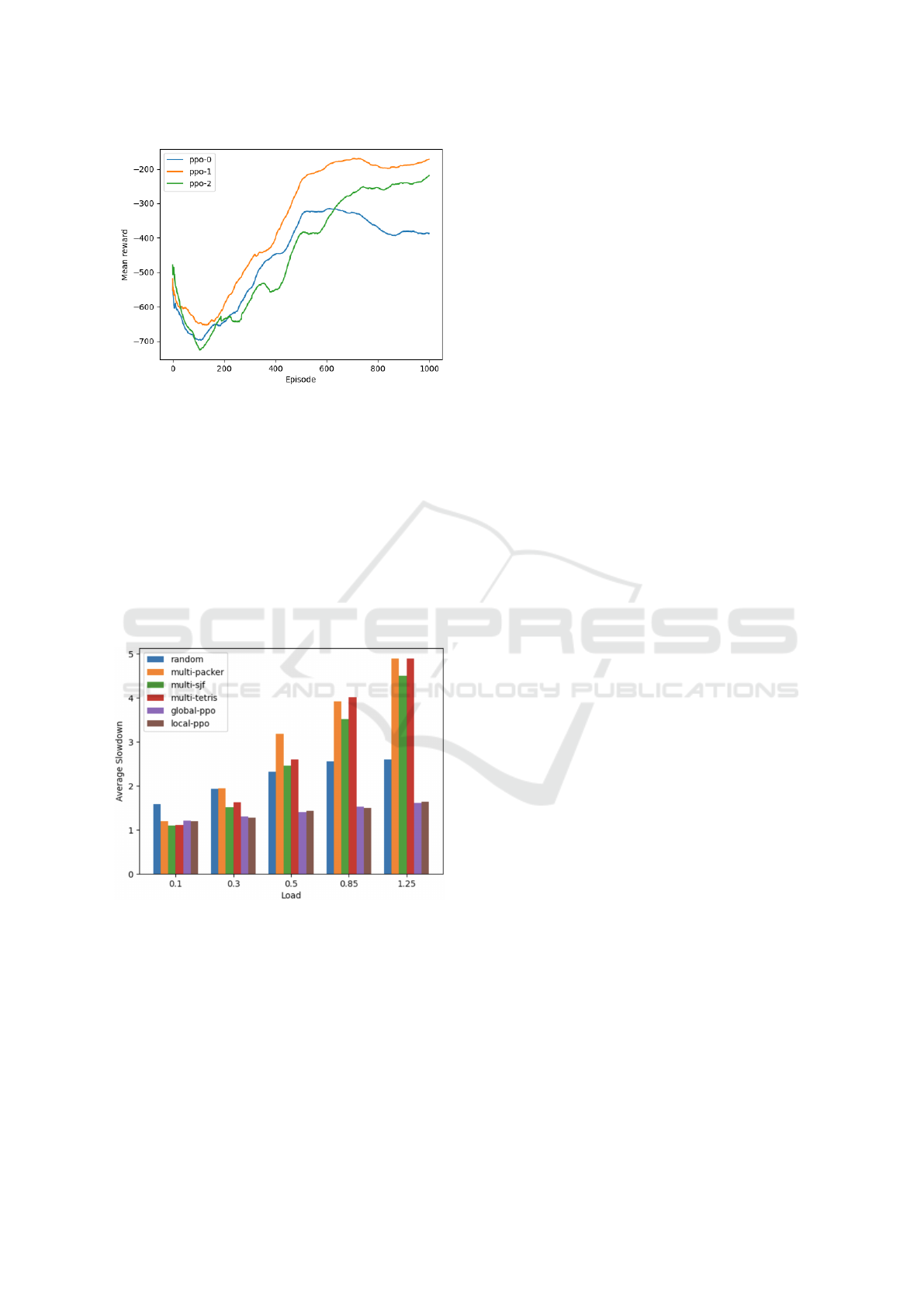
Figure 3: Running mean reward obtained over time by three
PPO agents, using local observations, local rewards and
having one machine per agent.
ample. We run 10 sample episodes of 200 timesteps
on trained PPO agents with both local and global in-
formation, as well as heuristics, and average the slow-
downs for comparison. We do this over different load
factors, and the results are summarized in Figure 4.
We note how there isn’t a significant difference be-
tween the slowdowns of PPO agents trained with lo-
cal or global information. Also, the generalisations of
packer and SJF agents do not scale well to the multi-
agent scenario.
Figure 4: Average job slowdowns over load factors of dif-
ferent methods in an environment with 3 machines and 1
machine per agent.
7 DISCUSSION
In summary, answering Q1 one can confidently state
that independent PPO agents can successfully inter-
nalise joint scheduling policies in a multi-agent multi-
machine setup that are comparable to or superseed
heuristics, as measured by job slowdown. This re-
sult is particularly significant given the complexity
of coordinating multiple agents and resources with-
out predefined rules or direct communication between
agents. Moreover, accessing global states and rewards
by individual agents facilitates faster and more stable
learning. The state and reward representations implic-
itly ensures that agents will not set different goals for
themselves, but learn to interact productively.
In response to Q2, our findings reveal that the dis-
tinction between global and local observations and re-
wards does not significantly impact job slowdowns.
This could partly be due to our experiments be-
ing conducted involving relatively small numbers of
agents and machines. However, we observed a no-
ticeable effect on the stability and speed of conver-
gence, which varies based on whether the observa-
tions and rewards are local or global. Our experi-
ments suggest that access to global information facili-
tates faster and more stable convergence, but does not
imply significant performance gains. This increase
in convergence speed implies that every learning up-
date contributes to the agents’ ability to learn col-
laboratively, and that successfully incorporating other
agents’s feedback proves to be useful on an individ-
ual level. In contrast, relying solely on local informa-
tion seems to highlight the non-stationary aspects of
the environment, impacting the speed of the learning
process. In terms of performance however, both are
capable of reaching comparable levels.
Moving on to Q3, we see how our agents super-
seed heuristics. This superiority is particularly evi-
dent in complex scenarios where multiple agents in-
teract and collaborate. It is crucial to note that while
heuristics provide a baseline for decision-making,
they often fall short in multi-agent environments, es-
pecially as the number of agents increases.
8 CONCLUSIONS
In this paper we provided an Agent Environment
Cycle game framework that successfully extends a
general-purpose task scheduling simulator, able to
handle multiple agents and multiple machines per
agents. We also proved that in this context, Proxi-
mal Policy Optimisation is a feasible method that can
be successfully applied in a multi-agent setting in or-
der to find scheduling policies that are both plausibly
good as compared to heuristics and scalable as well.
While the achieved results seem promising, our
experiments are still conducted in a simulated envi-
ronment, thus an obvious line of future work that we
find important to outline is placing this in a practi-
cal context. One challenge of this is the assumption
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
1082

of knowing resource profiles in advance, which rarely
holds in practice, but tackling this is a necessity in
every practical approach.
In conclusion, our findings suggest that while
cluster scheduling remains a particularly difficult
problem, modern MARL methods are not only effec-
tive in managing resources, they are also a step to-
wards realizing fully autonomous and scalable cloud
systems. The ability of RL agents to learn and im-
prove over time, without human intervention or hand-
crafted features, aligns with the goal of developing
cloud systems that can self-manage and dynamically
adapt to changing conditions and requirements.
REFERENCES
Brockman, G., Cheung, V., Pettersson, L., Schneider, J.,
Schulman, J., Tang, J., and Zaremba, W. (2016). Ope-
nai gym. arxiv. arXiv preprint arXiv:1606.01540, 10.
Dauz
`
ere-P
´
er
`
es, S., Ding, J., Shen, L., and Tamssaouet, K.
(2023). The flexible job shop scheduling problem: A
review. European Journal of Operational Research.
Fan, Y., Li, B., Favorite, D., Singh, N., Childers, T., Rich, P.,
Allcock, W., Papka, M. E., and Lan, Z. (2022). Dras:
Deep reinforcement learning for cluster scheduling in
high performance computing. IEEE Transactions on
Parallel and Distributed Systems, 33(12):4903–4917.
Lanctot, M., Lockhart, E., Lespiau, J.-B., Zambaldi, V.,
Upadhyay, S., P
´
erolat, J., Srinivasan, S., Timbers, F.,
Tuyls, K., Omidshafiei, S., et al. (2019). Openspiel: A
framework for reinforcement learning in games. arXiv
preprint arXiv:1908.09453.
Liu, C.-L., Chang, C.-C., and Tseng, C.-J. (2020). Actor-
critic deep reinforcement learning for solving job shop
scheduling problems. Ieee Access, 8:71752–71762.
Mao, H., Alizadeh, M., Menache, I., and Kandula, S.
(2016). Resource management with deep reinforce-
ment learning. In Proceedings of the 15th ACM work-
shop on hot topics in networks, pages 50–56.
Mirhoseini, A., Goldie, A., Yazgan, M., Jiang, J. W.,
Songhori, E., Wang, S., Lee, Y.-J., Johnson, E.,
Pathak, O., Nazi, A., et al. (2021). A graph place-
ment methodology for fast chip design. Nature,
594(7862):207–212.
OpenAI, M. A., Baker, B., Chociej, M., J
´
ozefowicz, R.,
McGrew, B., Pachocki, J. W., Pachocki, J., Petron,
A., Plappert, M., Powell, G., et al. (2018). Learning
dexterous in-hand manipulation. corr abs/1808.00177
(2018). arXiv preprint arXiv:1808.00177.
Paduraru, C., Patilea, C. C., and Iordache, S. (2023). Task
scheduling: A reinforcement learning based approach.
In ICAART (3), pages 948–955.
Schulman, J., Moritz, P., Levine, S., Jordan, M., and
Abbeel, P. (2015). High-dimensional continuous con-
trol using generalized advantage estimation. arXiv
preprint arXiv:1506.02438.
Schulman, J., Wolski, F., Dhariwal, P., Radford, A., and
Klimov, O. (2017). Proximal policy optimization al-
gorithms. arXiv preprint arXiv:1707.06347.
Silver, D., Schrittwieser, J., Simonyan, K., Antonoglou, I.,
Huang, A., Guez, A., Hubert, T., Baker, L., Lai, M.,
Bolton, A., et al. (2017). Mastering the game of go
without human knowledge. nature, 550(7676):354–
359.
Sutton, R. S. and Barto, A. G. (2018). Reinforcement learn-
ing: An introduction. MIT press.
Sutton, R. S., McAllester, D., Singh, S., and Mansour, Y.
(1999). Policy gradient methods for reinforcement
learning with function approximation. Advances in
neural information processing systems, 12.
Tassel, P., Gebser, M., and Schekotihin, K. (2021). A rein-
forcement learning environment for job-shop schedul-
ing. arXiv preprint arXiv:2104.03760.
Terry, J., Black, B., Grammel, N., Jayakumar, M., Hari, A.,
Sullivan, R., Santos, L. S., Dieffendahl, C., Horsch,
C., Perez-Vicente, R., et al. (2021). Pettingzoo: Gym
for multi-agent reinforcement learning. Advances in
Neural Information Processing Systems, 34:15032–
15043.
Wang, M., Zhang, J., Zhang, P., Cui, L., and Zhang, G.
(2022). Independent double dqn-based multi-agent
reinforcement learning approach for online two-stage
hybrid flow shop scheduling with batch machines.
Journal of Manufacturing Systems, 65:694–708.
Ye, Y., Ren, X., Wang, J., Xu, L., Guo, W., Huang, W.,
and Tian, W. (2018). A new approach for resource
scheduling with deep reinforcement learning. arXiv
preprint arXiv:1806.08122.
Yu, C., Velu, A., Vinitsky, E., Gao, J., Wang, Y., Bayen, A.,
and Wu, Y. (2022). The surprising effectiveness of ppo
in cooperative multi-agent games. Advances in Neural
Information Processing Systems, 35:24611–24624.
Zhang, J.-D., He, Z., Chan, W.-H., and Chow, C.-Y.
(2023). Deepmag: Deep reinforcement learning with
multi-agent graphs for flexible job shop scheduling.
Knowledge-Based Systems, 259:110083.
Zhao, X. and Wu, C. (2021). Large-scale machine learn-
ing cluster scheduling via multi-agent graph reinforce-
ment learning. IEEE Transactions on Network and
Service Management.
Zhu, X., Xu, J., Ge, J., Wang, Y., and Xie, Z. (2023). Multi-
task multi-agent reinforcement learning for real-time
scheduling of a dual-resource flexible job shop with
robots. Processes, 11(1):267.
Multi-Agent Deep Reinforcement Learning for Collaborative Task Scheduling
1083
