
A Computer Vision Approach to Compute Bubble Flow of Offshore Wells
Rogerio C. Hart
a
and Aura Conci
b
Institute of Computing, Universidade Federal Fluminense, Niteroi, Rio de Janeiro, Brazil
Keywords:
Video Analysis, Segmentation, Flow Rate, Neural Network Model, Offshore Substructure.
Abstract:
This work presents two approaches for detecting and quantifying the offshore flow of leaks, using video
recorded by a remote-operated vehicle (ROV) through underwater image analysis and considering the premise
of no bubble overlap. One is designed using only traditional digital image approaches, such as Mathematical
Morphology operators and Canny edge detection, and the second uses segmentation Convolutional Neural
Network. Implementation and experimentation details are presented, enabling comparison and reproduction.
The results are compared with videos acquired under controlled conditions and in an operational situation,
as well as with all previous possible works. Comparison considers the estimation of the average diameter of
rising bubbles, velocity of rise, leak flow rate, computational automation, and flexibility in bubble recognition.
The results of both techniques are almost the same depending on the video content in the analysis.
1 INTRODUCTION
Oil is one of the most important energy sources used
by man and of pollution to the environment. It is
composed of several elements, ranging from light
gas (methane) to heavy crude oil. Hydrocarbons are
formed by the grouping of atoms of carbon and hy-
drogen and can cause severe damage to the marine
environment. Oil pollution causes a collapse in vari-
ous activities carried out at sea, such as artisanal and
industrial fishing, tourism, leisure, and navigation, in
addition to compromising conservation areas. The
sources of oil pollution at sea are diverse and gen-
erally come from transport by submarine pipelines.
The remotely operated underwater vehicles (ROVs)
are a safe alternative for inspections on offshore oil
drilling wells. These ROVs are equipped with cam-
eras capable of checking the infrastructure integrity
and leakage of transported materials (Capocci et al.,
2017). Monitoring and quantifying fluid leaks is im-
portant to reduce environmental effects, (Kato et al.,
2017). Furthermore, quantifying the flow rate un-
der the sea is required by environmental organiza-
tions that aim to inspect and regulate companies that
exploit such resources (Capocci et al., 2017; Kato
et al., 2017). Some approaches in the literature need
complex solutions that involve the utilization of ROVs
with acoustic sensors to identify and estimate the leak
a
https://orcid.org/0009-0003-0258-9410
b
https://orcid.org/0000-0003-0782-2501
flow, where additional tools are required for complete
identification (such as scanning the sub-seafloor or
specific ROV positioning about the leak) making the
operation very difficult and with great additional costs
(Nikolovska et al., 2008; R
¨
omer et al., 2012; Sahling
et al., 2009). To periodically monitor, assess, and
inspect the wells and pipelines, many technologies
and methodologies have emerged, some using digital
image analysis (DIA) (Zielinski et al., 2010; Wang
et al., 2016). The use of DIA aims to perform a more
efficient flow estimation without the use of sophisti-
cated equipment or complex procedures for measure-
ments. The approach presented in this paper uses DIA
to compute bubble leak rate without extra equipment
attached to the ROV or complex operational proce-
dures to achieve results inside the acceptable amount
of variations (Ding, 2003).
Considering the related literature (see section 2)
the new contributions of this work are : (1) a method-
ology that uses DIA on ROV videos for estimation of
bubble flow rate with acceptable processing time; (2)
a detailed algorithm able to efficiently estimate fluid
flow, equivalent diameter of a bubble, and bubble rise
speed and; (3) creation of a set of publicly available
videos that can be used as benchmarks (ground truths)
for future comparison by the interested community.
Section 2 discusses previous works related to the ap-
proach presented in Section 3 and 4. The results and
conclusions are presented subsequently in Sections 5
and 6 respectively.
664
Hart, R. and Conci, A.
A Computer Vision Approach to Compute Bubble Flow of Offshore Wells.
DOI: 10.5220/0012433500003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 3: VISAPP, pages
664-671
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

2 RELATED WORK
Boelmann and Zielinsk, in 2014, reported methods
and tools developed to characterize and measure gas
flow on oil seeps. They used MATLAB to automat-
ically process videos pre-recorded by ROVs (Boel-
mann and Zielinski, 2014). In subsequent work, they
declare that one working day is needed to process
55,000 frames, showing that the approaches demand
a lot of time and computational effort (Boelmann and
Zielinski, 2015).
In order to characterize natural and anthropolog-
ical gas leaks from the seabed, Zelenka conducted a
3D analysis of the rising bubbles (Zelenka, 2014).
The author performs experiments using a glass box
and stereo-camera sensor. Automatic bubble detec-
tion and tracking algorithm based on the Kalman filter
is used for analysis. The work reports limitations of
using a single camera to estimate the velocity and size
of larger non-spherical bubbles (Zelenka, 2014). The
method proposed in the subsequent paper presents re-
liability and accuracy when used in places where there
is only one leak point, but unfeasible for situations
where multiple bubbles overlap (Jordt et al., 2015).
Vielst
¨
adte et al. proposed a study on the impact of
methane emission at three abandoned drilling wells
located in the North Sea in Norway (Vielst
¨
adte et al.,
2015). An ROV adapted with a funnel was used to
determine the flow of emitted gas. Initially, the funnel
is used to determine the time it takes for the gas to fill
the entire container. After, measurements of the size
versus quantity of the gas bubbles are analyzed using
the ImageJ software.
Wang and Socolofsky used MATLAB Image Pro-
cessing Toolbox to perform bubble counting, size
measurement, and quantification of the flow in a pre-
recorded video acquired by a ROV with a stereoscopic
imaging system in natural seafloor leaks (Wang and
Socolofsky, 2015). Their algorithm identified and
quantified bubbles considering their clustering or
overlapping aspects using differentiation for thresh-
old. The validation of the system was proceeded
by laboratory experiments using plumes and their
method increased the accuracy of the size measure-
ment by 90%. In subsequent work (in 2016), the au-
thors improved their method by performing quantifi-
cation of all bubbles in one frame per second to then
estimate flow (Wang et al., 2016).
Al-Lashi et al., in 2016, conducted a study in the
North Atlantic on the size of bubbles under breaking
waves using a new instrument capable of recording
high-resolution video at 15 frames/s over a period of 8
hours (Al-Lashi et al., 2016), the authors described an
automatic algorithm capable of processing one frame
in 5 s and the Hough transform was used for bubble
analysis. However, It is not applicable in non-circular
or overlapping bubbles situations.
In 2020, Takimoto et al. combined image pro-
cessing and analysis techniques for segmenting bub-
bles (Takimoto et al., 2020) using records from a labo-
ratory and ultrasound acquisitions in order to compare
their results on underwater gas leaks. Bubble over-
lapping cases are handled by allowing proper volume
calculations (Honkanen et al., 2005). The errors were
less than 2% in rise speed, 10% in bubble rate, and
14% in leak rate.
In 2020, Li et al. employs a two-channel output
U-net model on images with overlapping bubbles to
generate a segmented particle image and a centroid
image of the particles. From these images, are used
the watershed approach to generate new segmented
and separated particles from the centroids (Li et al.,
2020).
In 2022 Hessenkemper et al. tested three differ-
ent methods based on Convolutional Neural Networks
(CNN’s) for segment bubbles and 2 methods to recon-
struct hidden overlapping parts (Hessenkemper et al.,
2022).
In the same year, Fernandes et al. compare several
methods for edge detection of leak bubbles in images
taken from ROV’s videos(Fernandes et al., 2022a).
A few months ago Hart et al. used a method based
on the Canny edge detection, on images taken from
underwater ROV videos, to identify and count leak
bubbles and compare the results with other methods
and human observation (Hart et al., 2023)
3 SEGMENTING BUBBLES
The underwater videos acquired by ROVs are in RGB
color, and the resolution and number of frames per
second are known a priori. The cv.videoCapture
function is used to separate video frames. It is not vi-
able to analyze that only one part of each frame, called
Region of Interest (ROI), is used. This part presents
all relevant information, and the limits of ROIs are ad-
justed manually for each video. In the reference (Hart
et al., 2023), it can be seen the images used in this
work.
Among possible neural network architectures, the
U-net was chosen because it is a network of interme-
diate complexity and presents very good results in a
range of segmentation applications. The name origi-
nates from the U-like shape of this CNN model. U-net
consists of an encoder and a decoder structure. The
first reduces the width and height of an array but in-
creases the depth to extract features. The second does
A Computer Vision Approach to Compute Bubble Flow of Offshore Wells
665

the opposite in order to obtain local information from
the image. The encoder-decoder structures are cross-
connected (Ronneberger et al., 2015).
The Tensorflow and Keras libraries in Python lan-
guage were used for programming. The Google Co-
lab GPUs were used for training. The training im-
ages were taken from four videos. Two are captured
from experiments made in Universidade Federal Flu-
minense Fluid Mechanic laboratory considering air
bubbles propagating in water. The other two videos of
real leaks, with oil and gas bubbles in under sea deep
water. In all videos, original images were cropped to
256 X 256 pixels preserving the RGB color channels.
In total, 120 ROIs were used, taken from the real
leak video with oil bubbles, 46 from the real leak
video with gas bubbles, and 51 from the laboratory
video, totaling 217 images of 256 x 256 x 3 channels.
Of these, 163 were randomly chosen and reserved for
training and 54 for validation (a ratio of 75% for train-
ing and 25% for validation).
Due to the small number of images for training
and testing, it was necessary to use data augmenta-
tion, which consists of artificially increasing the train-
ing data by creating slightly modified copies of the
original dataset. For this, we use a library present in
the Keras package called IMAGEDATAGENERATOR.
The following arguments were used: rotation range =
90, width shift range = 0.3, height shift range = 0.3,
shear range = 0.5, zoom range = 0.3, horizontal flip =
True, vertical flip = True, fill mode = ’reflect’).
Figure 1: Learning curve for propose model, in the y-label
the loss in mean squared error and in the x-label the number
of epochs.
For training, the ADAM optimizer is used, with a
learning rate of 0.001. The regression loss function
used is the mean squared error and the accuracy is
used for evaluation of the results. The used steps per
epoch are 30, the same number for of steps are used
for validation, and up to 50 epochs are considered.
Fig. 1 presents the curves of training and testing the
model.
After validating, the net was used for the segment-
ing of the ROIs, i.e. bubbles were identified through
the network by using the ROIs frames for generating
masks with probabilities of the pixels present in the
image belonging to a bubble or not. ROI pixels with
a probability greater than or equal to 0.5 were consid-
ered as belonging to a bubble (positive) and smaller
as a background (negative).
3.1 Bubbles Segmentation by Image
Processing Methods
In this work two variations are used for the bubbles
recognition (we named them A and B). As Sections 5
and 6 will show, better results by using each one de-
pend on the expected or probable average distance
among bubbles and their distribution in the ROIs.
3.1.1 Variation A
This combination of traditional Image Processing
techniques has seven steps: (1) Conversion to gray
scale; (2) Histogram normalization; (3) Contrast ad-
justment; (4) Gradient computation; (5) Canny filter;
(6)Closing and; (7)Bubble full-fill.
The steps (1), (2), (5), (6), and (7), were described
in detail in reference (Hart et al., 2023), and other
steps are described in the following lines. Fig. 2
presents the result of applying the steps described
above in one of the original images for example.
Contrast Adjustment.
To further increase the contrast between the bub-
bles and the background, the entire frame has been
adjusted by a simple sequence of multiplication and
inversion procedures.
First, the tones of the frame were inverted, by us-
ing:
New pix el intensity = 255 − pixel intensity. (1)
Then, the frame was multiplied by 1.5 (using
CV.MULTIPLY) in order to reinforce the dark tones.
Finally, the frame in process was inverted again (by
Equation (1) to increase now the lighter tones (by
multiplying them by 2). These values (1.5 and 2) are
chosen after several experiments.
Gradient Computation.
This step consists of taking the image resulting
from the previous step and applying the external gra-
dient operation in it. That is, it uses the MOR-
PHOLOGYEX OpenCV function with the parameter
MORPH
GRADIENT. In this process, the circular
4 × 4 structural element was used, it is obtained apply-
ing the function GETSTRUCTURINGELEMENT with
the parameter MORPH ELLIPSE .
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
666

(a) RGB input and
its ROI.
(b) Y channel
conversion.
(c) Normaliza-
tion and contrast
adjusts.
(d) External
Morphological
Gradient.
(e) Canny Filter. (f) Closing. (g) Full-filled
bubble .
Figure 2: Outputs of each steps of the Variation A.
3.1.2 Variation B
Variation B has also seven steps. The first five sets
(Conversion to gray-scale; Histogram normalization;
Contrast adjustment; Canny Filter and; Closing) and
the last step are the same of A, i. e. the same of the
previous variation. The different is the inclusion of
an Erosion and a Dilatation morphological operations
before the last step.During the tests, we realized, that
for small bubbles, the previous steps tended to detect
bubbles with areas larger than the real ones. To re-
duce the bubble area without losing shape, we used
the Erosion OPENCV function with a 3x3 rectangular
structural element followed by the Dilation operation
with a 2x2 rectangular structural element. We used
the functions CV.ERODE and CV.DILATE in these. .
3.1.3 Automatic Selection of Variations A or B
In the developed implementation, selection between
the variations A or B is made automatically. The de-
cision is based on the results of a process that apply
three simple steps: (1) Method A is applied to the
first frame of the video to be analyzed; (2) The short-
est distance between the bubbles is computed in the
achieved results; (3) If this distance is greater than
the pre-defined parameter, then variation A is used
throughout the video, otherwise, variation B is applied
to ir. The pre-defined value was chose after some tests
and the value is 40 pixels.
For example, Fig2 presents well-spaced bubbles,
in which case method A will be applied. Fig. 3
presents some bubbles very close together, in which
case method B is chosen.
This test for variation selection must be used, dur-
ing experimentation, in some cases, variations A tends
to gather very close bubbles, but presents better re-
sults when there are bigger and more distant bubbles.
On the other hand, variation B presents better results
among closed and smallest bubbles.
4 BUBBLE FLOW EVALUATION
This section aims to present the used approach to
quantify the bubble’s average diameter, volume, and
rise speed. These elements are important to calcu-
late the leak flow rate using image analysis of ROVs
recorded videos. In all the analysis we are consider-
ing the initial hypothesis of non-overlapping bubbles.
All analyzed techniques were implemented in Python,
using mainly functions already available in the Open
CV 4.7 library.
4.1 Average Diameter and Volume
Calculation
After the bubbles are identified in the frames and
are white-filled, the frames are processed by the
NUMPY. The NP.UNIQUE function counts the white
pixels present in each frame i. Then FINDCOUNTORS
function enumerates the separate bubbles in a frame i
(n
i
) and provides an array with the position of bubble
edge pixels.
From the quantity of white pixels of each bubble,
we compute the total leak area (in mm) in the ROI of
the frame i using Equation (2):
total area =
total white pixels
resoltuion
2
(2)
Where resoltuion is the resolution of the video in
pixels/mm of frame i
From the total area, in mm, it is possible to cal-
culate the average diameter, D
avg
, of the bubbles in
the ROI of the frame i. For this, the bubble shape is
A Computer Vision Approach to Compute Bubble Flow of Offshore Wells
667

considered approximated by circles. That is, we use
the hypothesis that is possible to use Equation (3) for
diameter computation:
D
i
=
r
4 × total area
πn
i
(3)
where n
i
is number of bubbles presents in frame i
Considering that the bubble can be approximated
by spheres, using the average diameter, D
avg
, the av-
erage volume of one individual bubble in the frame i
V
i
, can be described by Equation (4):
V
i
=
4
3
π
D
avg
2
3
(4)
4.2 Average Rise Speed
The “geometric center” for each bubble in the ROI
can be approximated by its center of mass (CM).
These positions can be computed using the FIND-
CONTOURS function (that provides the contour pixels
of each bubble) and its center location is calculated by
using the edges pixels. The important data to be used
for bubble identification (that must be saved) are the
perimeter and CM positions, that is the horizontal and
vertical position (x and y) of the CM for all bubbles in
a frame i. We also keep these data from the previous
frame i–1 for comparison.
From this tree information, a bounding box is
drawn in an individual bubble in frame i–1, and the al-
gorithm will be looking for a bubble within the same
bounding box with a similar perimeter in the subse-
quent frame i. If in the frame there is at least one
bubble found, we calculate the distance between the
CM in frame i and frame i − 1. In cases where all bub-
bles have different perimeters or there are no bubbles,
we move on to the next bubble in the frame i–1, un-
til through over all the bubbles in the frame. Fig. 3
shows this process. This method neglects overlapping
bubbles that are identified as single bubbles like those
marked by the green box in Fig. 3.
The velocity for each bubble in the current frame
i can be calculated by the difference between the bub-
ble position in the current frame i and the previous
frame i − 1. As only the velocity in the vertical di-
rection is important, only this position is taken under
consideration for such a computation of v
yi
:
v
yi
=
y
cmi
− y
cm(i−1)
t
(5)
where y
cmi
is the vertical position of the CM bub-
ble in the frame i, and y
cm(i−1)
it position in previous
frame i − 1. The time interval t considered is the time
elapsed two consecutive frames that is the inverse of
the frames frequency, or the number of frames per
Figure 3: Naming the top image frame i − 1 and the bottom
one frame i. Bounding boxes show bubble search areas in
the next frame. If the bubble found has a perimeter close to
that of the previous frame (blue box) it is used for the calcu-
lation. In case of an overlapping bubble that is separated in
the subsequent frame or the shape is significantly modified
(green box) it is disregarded.
second. The average velocity v
yMi
in frame i will be
the average of the velocities over all bubbles present
in the ROI for each frame i.
4.3 Average Bubble Flow Rate Q
From the equations of previous section, the average
flow rate Q can calculated from Equation (6):
Q = n × V
M
×
v
yM
H
ROI
(6)
where n is the number of bubbles presents in the ROI;
V
M
is the average volume of each bubble present in
the ROI; v
yM
is the average rise speed of the bubble
in the video; H
ROI
is the height of the ROI, and the
average flow in the video is Q. In the end all averages
were taken over all frames.
5 COMPARISONS
This section presents a comparison among results pre-
viously obtained experimentally, those estimated by
the previous approaches (Chagas, 2022)(Fernandes
et al., 2022b) and by actual implementation. The
aspects used to compare the results are the bubble’s
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
668
average diameter, rise speed, and flow rate for each
video. All experimental and previous model results
are available (Chagas, 2022; Fernandes et al., 2022a).
To test the accuracy of the proposed algorithm, ex-
periments were performed using two types of videos:
videos acquired in controlled conditions in a labo-
ratory and real videos recorded under the sea. The
videos from laboratory named 021, 014, 022 and 024
are available at http://hidrouff.sites.uff.br/reconheci
mento-automatico-de-vazamento-em-estruturas-sub
marinas-raves, and the real videos with identification
NA046-100 can be find after permission (Wang et al.,
2016).
Previous implementations of our group use video
analysis to compute the volume and the rate of
flow. One of these previous implementations uses
EMGUCV´s library and the following steps: (1)
Transform the image from RGB to Y channel; (2)
Apply a gradient filter using an elliptical 4×4 struc-
tural element; (3) Threshold the frames to a black and
white (binarization); (4) Apply morphological oper-
ations of opening and closing with elliptical struc-
turing elements of sizes 3×3 and 5×5, respectively
(Chagas, 2022). To obtain the bubbles ascend speed,
the EMGUCV´ S TRACKER functions were employed
by using the CHANNEL and SPATIAL RELIABILITY
TRACKING (CSRT) algorithm. However, it needs a
manual selection of a bounding box to track the mo-
tion of the select bubble (Chagas, 2022).
Videos 014, 021, 022, and 024 have 2400 frames
and a rate of 240 frames/s and 2.6 pixels/mm. For
these videos, the ROI used in this approach is the
region between the pixels [300:600] vertically and
[560:700] horizontally. The video NA046-100 has
1200 frames, with 30 frames/s and 4.15 pixels/mm,
the ROI considered for this is between the pixels
[400:800] vertically and [600:1200].
5.1 Comparing the Average Diameter
Table 1 presents results related to the average diam-
eter found experimentally in our lab (column EXP.),
by the (Chagas, 2022) (column Previous) and the two
approaches here presented (i.e. using Image Process-
ing (IP) and Neural Network (NN) approaches). Ana-
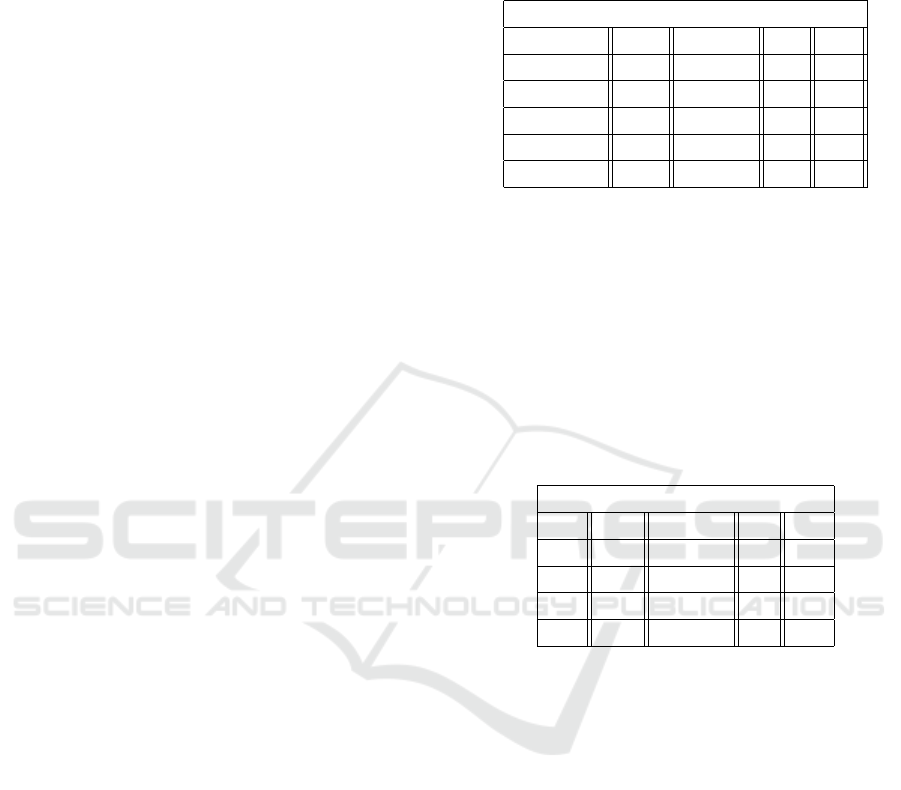
lyzing the Table, it can be seen that the current method
presented an average difference of only 3% from the
experimental results. This was 7% in the previous
implementation. The maximum difference between
the experimental and new approaches is 0.3mm while
comparing with the previous method shows 0.8mm.
Another advantage of the current implementation
is that there is no need for manual adjustments, in-
creasing the automation of the process. That is, the
Table 1: Comparison for average diameter, in mm, of the
rising bubbles in videos, experimentally (EXP.), by previ-
ous and this work by using Image Processing (IP) and Neu-
ralNetwork(NN) approaches .
Average Diameter (mm)
ID Exp. Previous IP NN
014 5.3 5.7 5.4 5.1
021 7 7.5 6.9 6.9
022 7.5 8 7.5 7.5
024 8.2 9 8.1 8.1
Na046-100 2.9 2.8 3.2 3.2
approaches here presented improves the recognition
and estimation of bubble size.
5.2 Bubble Rise Speed Comparison
Table 2 presents results related to bubble rise veloc-
ity found experimentally in the lab, by the (Chagas,
2022) and here presented by approaches.
Table 2: Comparison for average Bubble rise speed in cm/s
in videos, experimentally, by previous and by here pre-
sented approaches.
Average rise speed (cm/s)
ID Exp Previous IP NN
014 33 34 37 36
021 31 30 31 31
022 33 32 33 33
024 38 37 38 36
Video Na046-100 does not show the average rise
speed in its results, for this reason, it does not appear
in Table 2. Regarding the rise speed estimation, both
here presented approaches show an average percent-
age difference of 3%.
The advance presented by the current method is
that while the previous one requires choosing a bub-
ble and manually tracing the bounding box, now it
becomes automatic. This manual selection can be a
problem in a video with many objects and various
rise speeds as in the video Na046-100. Moreover, the
current version allows automated measurement of the
rise speed of several bubbles simultaneously.
5.3 Comparing the Flow Rate
Estimation
Table 3 presents results related to flow rate found ex-
perimentally in the lab, by the previous work [blind1]
and by this new approaches.
Regarding the flow rate, the current method had
A Computer Vision Approach to Compute Bubble Flow of Offshore Wells
669
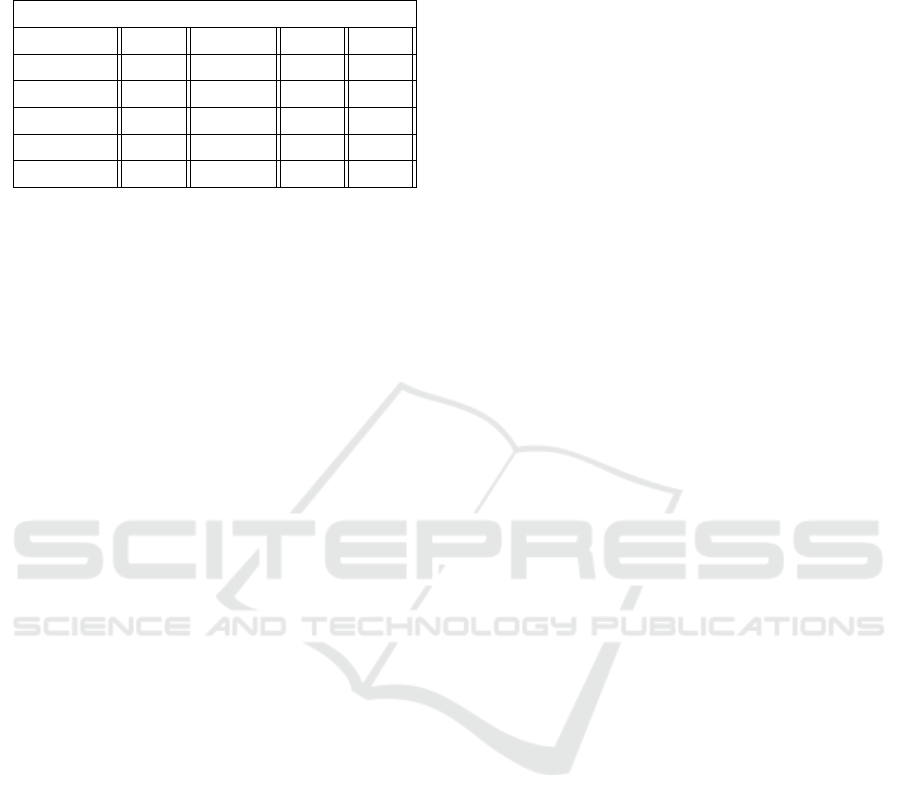
Table 3: Comparison for estimate flow rate in mL/min in
videos, experimentally, by previous and here presented ap-
proaches.
Estimate Flow Rate Q in (mL/min)
ID Exp. Previous IP NN
014 96.6 97.2 109.1 92.5
021 86.6 86.9 85.1 83
022 131.9 133.5 135.3 134.8
024 234.9 229 232.6 225
Na046-100 30 33.2 31.1 30.3
a little worse difference in the experimental values,
with an average difference of 4% compared to the pre-
vious one of 3%.
Considering all the presented tables, for some
videos, the current method showed better results in
terms of diameter and rise speed but worse in terms
of flow Q requiring further analysis in the future.
6 CONCLUSIONS
This paper presents new approaches to detect and
measure underwater leakage through video analysis.
The results are presented in terms of the diameter, vol-
ume, speed, and flow rate of bubbles from leakages
carried out under controlled laboratory conditions or
in a real environment on the ocean floor. These are
useful for fluid leak detection, calculating the leaked
oil volume, or other ROV imaging applications.
All steps of the proposed approach are presented,
allowing an easy reproduction since simple compu-
tational tools are used. Most of the videos used are
publicly available as indicated in Section 5, so the re-
sults can be compared by the interested community.
The current approaches show evolution in several
aspects compared to the previous. Such enhance-
ments are in (1) The estimation of the average di-
ameter; (2) The recognition and counting of bubbles,
and (3) The automation of the rise speed measure-
ment process with improvements in the results. An-
other important aspect is that the new implementation
is more flexible, allowing the selection between two
Image Processing recognition or a Neural Network
based on the average distance of the bubbles in the
video.
The proposed implementation of the algorithm
shows potential for use in leak detection and estima-
tion. Furthermore, when compared with data from
ground truths, our approach presents good accuracy
and precision for important measurements such as
bubble diameter, volume, velocity, and flow rate (in
a controlled environment and in videos of real situa-
tions reported in the literature).
However, we identified possible improvements of
the algorithm, including: (1)Treatment of overlap-
ping bubble; (2)Implementation of the automatic ad-
just of the ROI; (3) Flexibility in bubble detection for
different lighting and backgrounds; (4) Possibility of
bubble shrinkage throughout the water column (Wang
et al., 2020); (5) Diversions of bubble sizes and sub-
stances of the environment (Wu et al., 2021); (6) Al-
low fluids in turbulent state (Wu et al., 2021); (7) Im-
plementation of artificial intelligence techniques for
calculation of the rise speed; (8) Test on a wider range
of videos with different lighting, backgrounds and
products.
We believe that with minimal modifications and
after the additional necessary validations, there is a
real possibility of the use of this approach in real situ-
ations, where the implementation is an embedded sys-
tem in the ROV.
ACKNOWLEDGEMENTS
Specially, the authors thank Professor Wang of the
University of Missouri for providing the actual videos
for comparing here (Wang and Socolofsky, 2015;
Wang et al., 2016; Wang et al., 2020). We ex-
press gratitude to the Hydrology Group of Universi-
dade Federal Fluminense for carrying out the labora-
tory experiments and permission to use their resulting
videos, We would like to thank A. F. Gonc¸alves and J.
V. de Souza Chagas for their guidance and assistance
during the project. A.C. acknowledge the support re-
ceived from CNPq, CAPES, and FAPERJ .
REFERENCES
Al-Lashi, R. S., Gunn, S. R., and Czerski, H. (2016). Auto-
mated processing of oceanic bubble images for mea-
suring bubble size distributions underneath breaking
waves. Journal of Atmospheric and Oceanic Technol-
ogy, 33(8):1701–1714.
Boelmann, J. and Zielinski, O. (2014). Characterization and
quantification of hydrocarbon seeps by means of sub-
sea imaging. In 2014 Oceans-St. John’s, pages 1–6.
IEEE.
Boelmann, J. and Zielinski, O. (2015). Automated char-
acterization and quantification of hydrocarbon seeps
based on frontal illuminated video observations. J.
Eur. Opt. Soc. Rapid Publ, 10.
Capocci, R., Dooly, G., Omerdi
´
c, E., Coleman, J., Newe,
T., and Toal, D. (2017). Inspection-class remotely op-
erated vehicles—a review. Journal of Marine Science
and Engineering, 5(1):13.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
670

Chagas, J. V. d. S. (2022). Quantification of underwater
bubble leaks applied to the oil industry (in portuguese:
Quantificac¸
˜
ao de vazamentos de bolhas subaqu
´
aticas
aplicada
`
a ind
´
ustria de petr
´
oleo). M.Sc. Dissertation,
available in: http://www.ic.uff.br/index.php/pt/pos-
graduacao/teses-e-dissertacoes (2022).
Ding, Z. R. (2003). Hydromechanics. Higher Education
Press (Beijing).
Fernandes, A., Passos, F. G. O., and Conci, A. (2022a).
Comparing image preprocessing techniques for detec-
tion of bubbles in leaks. In 2022 29th International
Conference on Systems, Signals and Image Process-
ing (IWSSIP), volume CFP2255E-ART, pages 1–4.
Fernandes, A., Passos, F. G. O., and Conci, A. (2022b).
Comparing image preprocessing techniques for detec-
tion of bubbles in leaks. In 2022 29th International
Conference on Systems, Signals and Image Process-
ing (IWSSIP), volume CFP2255E-ART, pages 1–4.
Hart, R. C., Goncalves, L. M. G., Conci, A., and Ara-
gao, D. P. (2023). Comparing image processing tech-
niques for bubble separation and counting in under-
water leaks. In 2023 30th International Conference
on Systems, Signals and Image Processing (IWSSIP),
pages 1–5.
Hessenkemper, H., Starke, S., Atassi, Y., Ziegenhein, T.,
and Lucas, D. (2022). Bubble identification from im-
ages with machine learning methods. International
Journal of Multiphase Flow, 155:104169.
Honkanen, M., Saarenrinne, P., Stoor, T., and Niinim
¨
aki, J.
(2005). Recognition of highly overlapping ellipse-like
bubble images. Measurement Science and Technol-
ogy, 16(9):1760.
Jordt, A., Zelenka, C., Von Deimling, J. S., Koch, R.,
and K
¨
oser, K. (2015). The bubble box: Towards
an automated visual sensor for 3d analysis and char-
acterization of marine gas release sites. Sensors,
15(12):30716–30735.
Kato, N., Choyekh, M., Dewantara, R., Senga, H., Chiba,
H., Kobayashi, E., Yoshie, M., Tanaka, T., and Short,
T. (2017). An autonomous underwater robot for track-
ing and monitoring of subsea plumes after oil spills
and gas leaks from seafloor. Journal of Loss Preven-
tion in the Process Industries, 50:386–396.
Li, J., Shao, S., and Hong, J. (2020). Machine learn-
ing shadowgraph for particle size and shape char-
acterization. Measurement Science and Technology,
32(1):015406.
Nikolovska, A., Sahling, H., and Bohrmann, G. (2008).
Hydroacoustic methodology for detection, localiza-
tion, and quantification of gas bubbles rising from the
seafloor at gas seeps from the eastern black sea. Geo-
chemistry, Geophysics, Geosystems, 9(10).
R
¨
omer, M., Sahling, H., Pape, T., Bohrmann, G., and Spieß,
V. (2012). Quantification of gas bubble emissions
from submarine hydrocarbon seeps at the makran con-
tinental margin (offshore pakistan). Journal of Geo-
physical Research: Oceans, 117(C10).
Ronneberger, O., Fischer, P., and Brox, T. (2015). U-net:
Convolutional networks for biomedical image seg-
mentation.
Sahling, H., Bohrmann, G., Artemov, Y. G., Bahr, A.,
Br
¨
uning, M., Klapp, S. A., Klaucke, I., Kozlova, E.,
Nikolovska, A., Pape, T., et al. (2009). Vodyanit-
skii mud volcano, sorokin trough, black sea: Geolog-
ical characterization and quantification of gas bubble
streams. Marine and Petroleum Geology, 26(9):1799–
1811.
Takimoto, R. Y., Matuda, M. Y., Oliveira, T. F., Adamowski,
J. C., Sato, A. K., Martins, T. C., and Tsuzuki, M. S.
(2020). Comparison of optical and ultrasonic meth-
ods for quantification of underwater gas leaks. IFAC-
PapersOnLine, 53(2):16721–16726.
Vielst
¨
adte, L., Karstens, J., Haeckel, M., Schmidt, M.,
Linke, P., Reimann, S., Liebetrau, V., McGinnis, D. F.,
and Wallmann, K. (2015). Quantification of methane
emissions at abandoned gas wells in the central north
sea. Marine and Petroleum Geology, 68:848–860.
Wang, B., Jun, I., Socolofsky, S. A., DiMarco, S. F.,
and Kessler, J. (2020). Dynamics of gas bubbles
from a submarine hydrocarbon seep within the hy-
drate stability zone. Geophysical Research Letters,
47(18):e2020GL089256.
Wang, B. and Socolofsky, S. A. (2015). A deep-sea, high-
speed, stereoscopic imaging system for in situ mea-
surement of natural seep bubble and droplet charac-
teristics. Deep Sea Research Part I: Oceanographic
Research Papers, 104:134–148.
Wang, B., Socolofsky, S. A., Breier, J. A., and Seewald,
J. S. (2016). Observations of bubbles in natural seep
flares at mc 118 and gc 600 using in situ quantitative
imaging. Journal of Geophysical Research: Oceans,
121(4):2203–2230.
Wu, H., Wang, B., DiMarco, S. F., and Tan, L. (2021). Im-
pact of bubble size on turbulent statistics in bubble
plumes in unstratified quiescent water. International
Journal of Multiphase Flow, -(-):103692.
Zelenka, C. (2014). Gas bubble shape measurement and
analysis. In German Conference on Pattern Recogni-
tion, pages 743–749. Springer.
Zielinski, O., Saworski, B., and Schulz, J. (2010). Marine
bubble detection using optical-flow techniques. Jour-
nal of the European Optical Society-Rapid publica-
tions, 5.
A Computer Vision Approach to Compute Bubble Flow of Offshore Wells
671
