Automated Palette Cycling Animations
Ali Sattari Javid
a
and David Mould
b
School of Computer Science, Carleton University, Ottawa, Canada
Keywords:
Animation, Image Processing, Palette Cycling, Pixel Art.
Abstract:
We propose an automated method for palette cycling, a technique for animation storage and playback. A
palette cycling animation uses a fixed map of indices over the entire animation; each frame, the color lookup
table accesses by the indices changes. Historically, palette cycling animations were created manually. Here,
we present a method that automatically creates a set of palettes and an index map from an input video. We use
optimization, alternating between phases of choosing per-frame palettes and determining an index map given a
fixed set of palettes. Our method is highly effective for scenarios such as time-lapse video, where the lighting
changes dramatically but there is little overall motion. We show that it can also produce plausible outcomes
for videos containing large-scale motion and moving backgrounds; palette rotations with these features are
especially difficult to craft by hand. We demonstrate results over a variety of input videos with different levels
of complexity, motion, and subject matter.
1 INTRODUCTION
This paper describes an automated system for con-
verting a video into an animation using palette cy-
cling. Palette cycling is a technique for saving mem-
ory by using a shared set of palette indices across all
frames, only varying the per-frame palette. Note that
this is the opposite of a more conventional compres-
sion scheme such as that used for animated GIFs, in
which the palette is shared and the per-frame pixel
indices differ. Thus, in palette cycling, a different
palette index is needed for any two pixels which dif-
fer at any frame in the animation: the animation over
all frames and the color structure of individual frames
are jointly encoded into a single index map. Despite
this severe restriction, it is possible to encode seem-
ingly complex animations into small palettes. A hand-
crafted palette cycling animation by artist Mark Fer-
rari is shown in Figures 1 and 2, giving a sense of
what is possible; Figure 1 shows the palettes and in-
dex map, and Figure 2 shows examples of individual
frames.
Handcrafted palette cycling was a common tech-
nique for representing animations in the early days
of home computers, and can be used today when-
ever memory restrictions are severe. Palette cycling
typically produces much smaller files than the more
a
https://orcid.org/0009-0003-0217-782X
b
https://orcid.org/0000-0001-5779-484X
common encoding of per-frame index into a common
palette, but comes with significant limitations in re-
producing dynamic content.
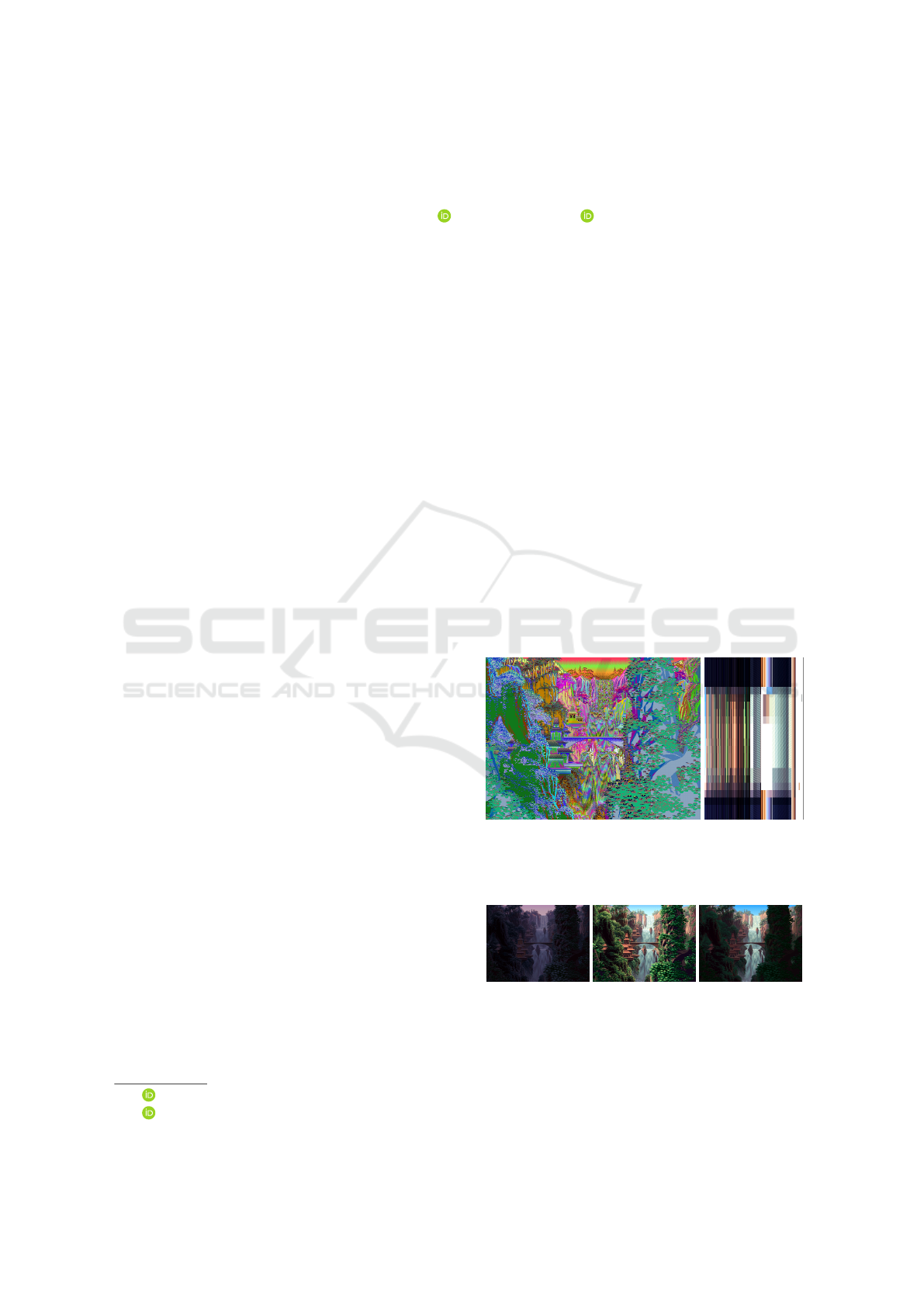
Figure 1: Visualization of index map (left) and palettes
(right) for an animation created by hand by Mark Ferrari.
Each palette is one horizontal strip, with the time sequence
progressing top to bottom.
Figure 2: Using a fixed index map, Ferrari created different
times of day just by changing the palette colors.
Handcrafted palette cycling animations typically
used fixed views and contained little motion. Small,
repetitive motions were possible, such as snow falling
or waves crashing on a beach. Large-scale color
changes, due to night falling or a change in season,
Javid, A. and Mould, D.
Automated Palette Cycling Animations.
DOI: 10.5220/0012432500003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 115-126
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
115

Figure 3: From top to bottom: our results with 16, 64, and
256 colors. Using the full 256 colors, our algorithm was
able to almost fully reconstruct the hand-drawn animation.
Results are good even with a reduction to 64 colors, and the
content is recognizable with as few as 16 colors.
were commonly depicted; see Figure 2. Such changes
play to the strength of palette cycling, where the col-
ors used can be radically different at different stages
of the animation.
We propose a method for automatic creation of
palette cycling animations from an input video se-
quence. We make no assumptions about the video
content, and are able to treat cases including large-
scale motion or camera movement that were ex-
tremely challenging to create by hand. Such scenarios
are not well suited to palette cycling, though. Palette
cycling is most effective for animations where there
is little camera movement and where there are color
changes over fixed objects, such as time-lapse video.
In our problem, we want to optimize both the
choice of colors and the assignment of colors to pix-
els in order to best match the arbitrary input video
sequence. We achieve this by alternating two opti-
mization tasks: we dither each frame using the fixed
palette for that frame, then we compute a quantiza-
tion of the image colorspace to obtain a palette to be
used in subsequent iterations. After several iterations
(around 200 for results we show) the process has con-
verged.
In this paper we propose a method that, given a se-
quence of images, creates the palettes and a shared in-
dex map that can be used to mimic handcrafted palette
cycling results. Our method alternates between creat-
ing the index map and creating palettes. We obtain
reasonable results for some typical use cases such as
sea waves and city skyline; however, for challenging
cases including large-scale motion, it is less success-
ful. Note, though, that such difficult cases are intrin-
sically difficult and we are not aware of handmade
examples that successfully portray this sort of con-
tent.We use an optimization process to create the ani-
mations. In an application, the palette cycling anima-
tions would be precomputed, and the resulting (very
small) index maps and palette sequences stored; at
runtime, the index map provides a lookup table into
the per-frame palettes, so the computational cost of
playback is extremely low.
2 PREVIOUS WORK
The problem of expressing an image with a small
color palette has been studied for a very long time.
Dithering was used to facilitate printing images in
newspapers, and with the advent of computer screens
was used to display gray scale images on a black and
white screen. Floyd-Steinberg (Floyd and Steinberg,
1976) algorithm dithering was one of earlier attempts
to automate the dithering process using error diffusion
to improve the results. A more recent approach (Pang
et al., 2008) to halftoning directly optimizes an en-
ergy function that estimates human perception of im-
age differences.
2.1 Dithering
Historically, halftoning algorithms were divided into
two styles: ordered dithering (Bayer, 1973), which
uses repetition of a structured pattern of thresholds
to approximate an image, and error diffusion (Floyd
and Steinberg, 1976), which processes pixels in some
order and distributed error to nearby unprocessed pix-
els. Ordered dither is fast, but often results in visible
repetition. Error diffusion is more flexible and many
variants have been developed (Eschbach and Knox,
1991; Liu and Guo, 2015; Kim and Park, 2018; Xia
et al., 2021).
Error diffusion methods are capable of producing
high-quality results, but can be slow. The literature
has seen various efforts at structure preservation, with
edge preservation (Eschbach and Knox, 1991; Li,
2006; Kwak et al., 2006) and integrated optimization
systems (Pang et al., 2008; Chang et al., 2009)pro-
posed. Hardware acceleration, moving some compu-
tation to the GPU, can reduce running times (Fran-
chini et al., 2019). More recently, deep learning
methods have been applied to halftoning (Kim and
Park, 2018; Xia et al., 2021). Such methods can
be extremely effective, but are costly. Since we use
halftoning as a computation within the inner loop of
an optimization process, we require an extremely fast
halftoning technique, and have opted not to use any
of these sophisticated yet expensive methods.
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
116

Work on halftoning has often been motivated by
applications in printing or e-ink, where only two col-
ors are available, or where a choice is made from a
small number of possible colors, known in advance
of the halftoning process. In our case, we can jointly
select the palette and the palette index distribution, a
comparatively little-studied problem.
Some work has been done on automated pixel
art (Gerstner et al., 2012; Inglis and Kaplan, 2012) re-
producing input images using few colors at ultra-low
spatial resolutions. While adjacent to our interests,
the main challenges here relate more to the spatial
resolution than the color reduction. That said, both
automated palette cycling and pixel art would benefit
from a halftoning method tuned to the requirements
of low-resolution images with medium palette sizes
(say, 256 to 1024 colors).
2.2 Palette Creation
Palette creation, as color quantization, is a technique
for reducing the number of colors used in a digital im-
age. This process emerged with the advancement of
computers and the ability to create custom palettes for
displaying images on screen. A common approach to
creating custom palettes is through the use of cluster-
ing algorithms in color space. Examples of this type
of algorithm include median cut (Heckbert, 1982),
octree (Gervautz and Purgathofer, 1988), and self-
organizing maps (Park et al., 2016).
Later algorithms improved the quality of palette
creation. One example is the modified median
cut (Joy and Xiang, 1993), which improves on the tra-
ditional median-cut algorithm by incorporating addi-
tional information such as color similarity and human
perception of color.
Despite the effectiveness of color quantization, the
limited palette size used in our application means that
dithering is still a necessity.
2.3 Joint Dithering and Palette Creation
Dithering and palette creation are interrelated prob-
lems. Rather than solving them independently, ap-
proaching them as a joint problem can produce
improved results. Orchard and Bouman (Orchard
et al., 1991) combine binary tree palette creation
with dithering.
¨
Ozdemir and Akarun (Ozdemir and
Akarun, 2001) combine fuzzy c-means methods with
Floyd-Steinberg dithering to create a color palette,
and then use this palette to perform quantization and
dithering as usual. Puzicha et al. (Puzicha et al., 2000)
were the first to simultaneously perform quantization
and dithering by minimizing a cost function based on
a weighted Gaussian distortion measure, which aims
to directly simulate the human visual system. Huang
et al. (Huang et al., 2016) improve on this method by
using an edge-aware Gaussian filter to avoid soften-
ing edges in the input image. None of these meth-
ods considered the problem of palette cycling; in this
work, we jointly create a palette and dithering where
the dithered image is an index map shared across an
entire animated sequence.
3 PROPOSED ALGORITHM
Our algorithm takes an input animation sequence I
consisting of a set of frames I
f
; our goal is to ob-
tain an index map M and a sequence of palettes P that
together form a palette cycling approximation of the
input video. The index map has one entry per pixel,
indicating which palette entry should be used to color
that pixel; the palette sequence has one palette per
input frame, with individual per-frame palettes indi-
cated as P
f
. We jointly find an index map and set
of palettes that minimize the difference between the
encoded animation and the original animation. Our
strategy is to alternate between (i) finding an index
map, given the current palette set; (ii) given the per-
pixel palette indices, determining a palette for each
frame to best match the corresponding input frame.
An overview of the process is shown in Figure 4.
Similar to Huang et al.’s method, we define a cost
function that we aim to minimize. Our cost function
is the total difference between the smoothed output
and smoothed input across all frames. We compare
smoothed frames so as to maximize the effectiveness
of the dithering; the human eye will naturally perform
some spatial integration, and we can obtain perceptu-
ally better results by smoothing compared to taking
the smallest-error result for an individual pixel. In-
deed, this is the premise underlying the entire field of
dithering. Smoothing is done using the bilateral filter;
note that smoothing is spatial and not temporal.
Let I
f
be the input image of frame f , and C
f
be
the function which computes smoothing over frame
f . Further, let M/P
f
be the output frame when
the palette at frame P
f
is applied using the index
map M. Consequently, C
f
(I
f
) and C
f
(M/P
f
) are
the smoothed versions of I
f
and M/P
f
respectively.
Given this notation, we can express the objective
function as follows:
error =
∑
f
||C
f
(I
f
) −C
f
(M/P
f
)||
2
, (1)
where we aim to find M and P that minimize the error.
Automated Palette Cycling Animations
117

Output Frames
Input Frames
Final Index Map
Final Palettes
Optimization loop: Alternate between
optimizing index map and palettes
Index Map
Per-Frame Palettes
Encoded sequence: global index map
plus palette for each frame
Figure 4: Overview of the process. From left to right: we begin with an input video sequence, divided into individual frames;
we create an index map and per-frame palettes and iteratively optimize them, alternating between optimizing the index map
(with fixed palettes) and the palettes (with fixed index map); when the optimization loop terminates, we have a final index
map and palette set, which can be decoded into individual frames approximating the input.
3.1 Initialization
We initialize the index map with random values: with
a palette size of n, each pixel gets a value in the range
0 to n − 1. The initial palette entries are obtained by
computing, for each index in a given frame, the aver-
age color of all pixels in the original frame that share
that index. Following initialization, we repeatedly al-
ternate between updating the index map, with fixed
palettes, and updating the palettes, with a fixed index
map. We discuss these two steps in turn in the follow-
ing subsections.
3.2 Dithering
In this step, we assign an index to each position in
the index map, given a fixed set of palettes. The ap-
proach is to modify the existing index map one entry
at a time. Inspired by simulated annealing, we make
random changes to the indices with probabilities tilted
towards the values that produce the least error. The
randomness is intended to allow the index map to es-
cape from local minima.
For each pixel, for each possible index assignment
i, we compute the associated error E
i
. The weight w
i
associated with index i is given by
w
i
= (1/E
i
)
(ln(γ)/ln(r))
, (2)
where γ is an iteration-dependent parameter used to
adjust the randomness during convergence, and r is
the ratio of the errors of the best and second-best
choice, used to guide the shape of the local proba-
bility distribution. The parameter γ is assigned using
a quadratic function, γ(k) = (k − µ)
2
+ ε, for iteration
count k and constants µ = 25 and ε = 2; the intent is to
have a large γ at the start and end of the minimization
process, weighting the best choice much more heav-
ily than the others, and a small γ for a period in the
middle, allowing a flatter distribution of weights and
letting the system explore variations on an initial ap-
proximately greedy assignment.
Having computed the distribution of weights for a
given pixel, we assign an index to that pixel, choosing
randomly with probability apportioned according to
the weights. We repeat this process across all pixels
treated during this iteration.
Because our error calculation incorporates
smoothing, a change to one pixel’s index affects the
weights for nearby pixels. Our maximum smoothing
kernel is 5 × 5. We would like to use information that
is up to date when selecting indices, but also want to
take advantage of parallelism. As a compromise, we
created a schedule for changing indices, where the
index map is divided into nine interleaved regions,
repeating according to the following pattern:
1a 2a 3c 1a ...
2c 3b 1c 2c ...
3a 1b 2b 3a ...
1a 2a 3c 1a ...
. . . . ...
Regions labeled 1, 2, 3 are processed in separate
iterations, while regions a, b, c are processed sequen-
tially within a given iteration. To be precise, only in-
dices with a numerical value equal to (k mod3)+1 are
changed during iteration k. Notice how within a given
5x5 window, the central index only appears once, so
that it can be changed and evaluated independently;
other indices are considered fixed. As a side effect,
since we only change one-third of the pixels within
an iteration, the index map remains relatively stable
between calculations of the per-frame palettes which
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
118

helps to speed up finding the numerical solution to the
equations in palette creation.
3.3 Palette Creation
We represent the sequence of palettes
for an animation as a set of 2D matri-
ces P
f
∈ Rˆ(indices × channels). We con-
sider the image frames to be 3D tensors
I
f
∈ Rˆ(width × height × channels). The
palette index lookups for the animation are
represented by a single 2D integer matrix
M[x,y] ∈ Nˆ(width × height), whose entries in-
dex into the palette for each frame. We encode
the output frame as a one-hot encoded matrix
ˆ
M[x,y,q] ∈ Rˆwidth × height × palette) shown in
equation 3:
ˆ
M[x,y,q] =
(
1 q = M[x,y]
0 q ̸= M[x,y]
(3)
The matrix
ˆ
M thus produces the sequence of out-
put frames through multiplication with the palette se-
quence. We can then express the goal of selecting a
suitable palette for frame f as the minimization of the
difference between the original frame and the output
frame:
min
P
f
||C
f
(
ˆ
M × P
f
) −C
f
(I
f
)|| (4)
As we have expressed everything in terms of lin-
ear equations, the minimization can be obtained by
solving the following overdetermined system to de-
termine P
f
:
C
f
(
ˆ
M × P
f
) = C
f
(I
f
). (5)
Note that equation 5 has a number of equations equal
to the number of pixels, but the number of unknowns
is only equal to the number of palette entries times the
number of color channels. Further note that we are
computing the difference of the smoothed images; to
solve for P
f
, we can incorporate the smoothing into a
single matrix and compute P
f
= (C
f
(
ˆ
M))
−1
×C
f
(I
F
),
where due to the overdetermined system, we use a
pseudoinverse and not an inverse.
Solving the system of equations can yield unreal-
izable colors; for example, they might have negative
components. One might imagine various ways of ad-
dressing this, such as rescaling the entire palette se-
quence to the legal range. We do not want to change
the entire color sequence because of a few outliers.
Instead, we identify illegal entries and modify them
individually, clamping the color components to the
permitted range, as follows:
P
f
[i] =
(
ˆ
P
f
[i]
ˆ
P
f
[i] in range
max(0,
ˆ
P
f
[i]) ×
range
|
ˆ
P
f
[i]|
otherwise
(6)
The collection of per-frame palettes obtained from
solving equation 5 for each frame produces a tentative
collection of colors which are used in the next round
of index selection. After several rounds of alternat-
ing global index selection and per-frame palette se-
lection, we have our output, an approximation of the
input video sequence encoded as a palette cycling an-
imation.
3.4 Additional Complications
Two final details must be added. First, we discuss a
“palette compression” modification, designed to free
up a few palette indices for small but visible details
in the animation. Second, we describe a schedule for
adjusting the smoothing kernel size, beginning with a
small kernel and migrating to a larger one over time;
this is done to improve performance, since a smaller
kernel can be processed more quickly, and early iter-
ations are so far from the input video that smoothing
makes little difference.
3.4.1 Palette Compression
The global error-minimizing solution may ignore
small, ephemeral details that are nonetheless percep-
tually salient. To combat this, we intermittently com-
press the palettes so as to be able to represent the
main colors with fewer palette entries. The colors thus
freed are able to be used for additional animation or
for rare but distinct colors. We opted to perform com-
pression every five iterations; the results are not very
sensitive to the frequency of compression.
Palette compression is done by computing k-
means clustering over the colors in the palette, with
a cluster count of 90% of the original palette size.
Following clustering, we update the palette and the
corresponding index maps to use the cluster centers
as the new palette entries.
Following palette compression, some indices in
the palette are now unused. We can then use them
for specific, high-impact details. We process the in-
dex map, looking for the indices that contribute the
greatest amount of error. The m unused entries in the
palette are then assigned to the m locations in the in-
dex map with largest error. At first glance, it may
seem wasteful to use an index entry for a single pixel,
but recall that we are undertaking an iterative process
and these new indices will be available to the rest of
the index map at later iterations.
A typical outcome of the above compression and
reassignment process is for certain palette entries to
Automated Palette Cycling Animations
119

be used by small-scale repeating patterns in the video,
such as lights in windows and headlights of cars mov-
ing along a highway. Although these entries are used
very few times in the dithered image, they often rep-
resent highly salient details, such that reserving some
palette entries in this way improves the fidelity of the
palette cycling animation.
3.4.2 Smoothing Schedule
We smooth using the bilateral filter with a 5 × 5
smoothing window. For each kernel, the weights
are computed per-frame and per-pixel, a moderately
costly process. We propose starting with a kernel
diameter of 1 at the beginning, effectively disabling
smoothing, and gradually increasing the kernel size
as the algorithm approaches the maximum iteration
count. In this way, we are able to process the early
iterations more quickly, while performing the final
rounds of iteration using the full kernel; typically we
ran 220 iterations and had the full kernel size from it-
eration 170 onward. This smoothing schedule saved
computation; see Table 1 for per-iteration times for
a sample animation. Empirically, beginning with a
smaller kernel had no negative effect on the final er-
ror; some quantitative results are provided in the fol-
lowing section.
Table 1: Average time per iteration given different kernel
sizes. Data is given for the tower animation with 256 palette
entries.
kernel diameter (pixels) 1 5 9 21
time per iteration (seconds) 2.73 8.12 10.63 10.40
4 RESULTS
We tested our method on some types of scenes that
have been traditionally animated using handcrafted
palette cycling. In addition, we tested on scenar-
ios such as human-figure movement and large-scale
motion, where we have not seen palette cycling an-
imations made by hand. In this section, we first re-
port quantitative measures, followed by examples and
qualitative evaluation of different scenarios in the in-
put video. Out examples include repetitive motion,
time-lapse video, and more difficult cases involving
large-scale motion and moving backgrounds or view-
points.
4.1 Error Profiles
To evaluate the results, we computed an error mea-
sure, comparing each frame in the algorithm result
against its counterpart in the original image. As men-
tioned previously, we use smoothed versions of both
images, useful in assessing dithered images. The
smoothing uses the bilateral filter with ς
d
= 100 and
ς
c
= 500.
We use the towers example as a standard bench-
mark for many evaluations. This animation consists
of 150 frames at 320x570 resolution. Its palette se-
quence is shown in Fig 5, while Figure 6 compares
two frames of the source video against the recon-
structed images.
Figure 5: Visualization of palette sequence for the tower
example. Palettes are horizontal stripes; time progresses
top to bottom. Notice the blinking lights, visible as dashed
lines in some indices.
Figure 6: Two sample frames from the tower example.
Above: original frames; below: palette cycling versions.
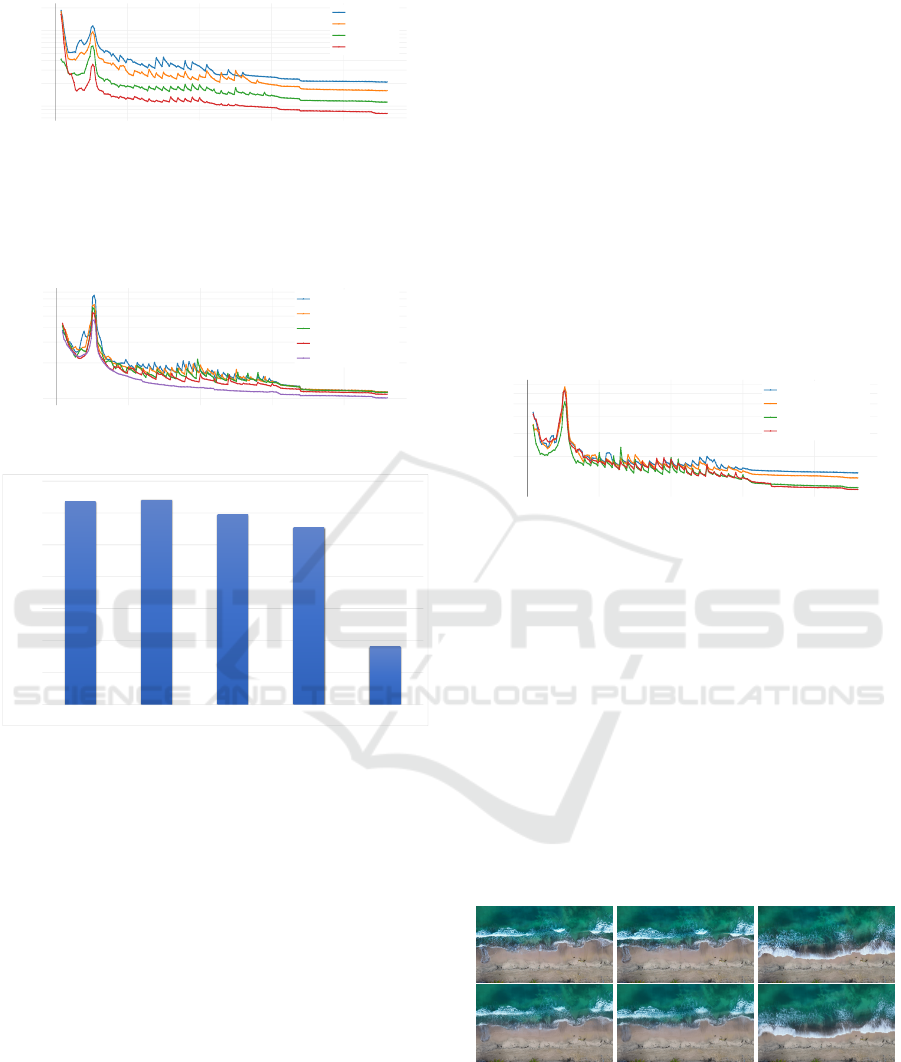
Figure 7 shows the error measure as the index map
and palettes are refined over many iterations. Unsur-
prisingly, larger palettes produce smaller absolute er-
ror. The spikes in the error are aligned with instances
of palette compression, when a few palette entries are
repurposed to cover small details, often animated de-
tail. The spikes quickly subside as the new indices are
used for additional pixels, as previously described.
In Figure 8, we can see that when the compres-
sion runs less frequently, the average error across all
frames decreases. However, the number of colors
used for animation will decrease as well; see Figure 9.
A larger number of animated colors yields greater vi-
sual interest and higher fidelity for time-varying pix-
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
120
0 50 100 150 200
7
8
9
100k
2
3
4
5
6
7
8
9
1M
2
tower(32)
tower(64)
tower(256)
tower(1024)
Figure 7: The convergence rate as compared between dif-
ferent palette sizes.
els, which are highly salient perceptually. Balancing
between these two considerations, we decided to ap-
ply compression every 5 frames.
0 50 100 150 200
100k
200k
300k
400k
500k
600k
700k
800k
Every 4th
Every 5th
Every 7th
Every 10th
No Compression
Figure 8: The effect of compression on the error.
0
20
40
60
80
100
120
140
Every 4th Every 5th Every 7th Every 10th No Compression
Number of Animated Entries in Palette
Figure 9: The effect of compression on the number of an-
imated colors in the palette. A larger number of animated
colors indicates more resources expended on animated por-
tions of the video, which is desirable.
As shown in Figure 10, using our progressive ker-
nel size plan has an almost negligible impact on the fi-
nal error values, and even potentially a benefit. Using
the smaller kernel sizes in the initial iterations may
prevent the algorithm from getting stuck in a local op-
timum, producing even lower error values when the
progressive method switches to 5x5 kernel sizes at it-
eration 170.
Table 2 shows summary statistics for selected in-
put videos and configurations. Error is reported as
a per-pixel average, i.e., normalized for video length
and frame size; timing figures are per iteration. The
computation time is linear in number of frames and in
number of pixels.
The table shows significant increases in cost for
large palette sizes (1k and higher) with only modest
gains in video quality. Simpler animations such as
the moon can obtain excellent results even with small
palettes, while challenging results such as the ranger
have high error. When frames in the animation are
significantly different, it is more difficult to encode
them into a single index map; thus, the “random”
example (where the frames blend between unrelated
images) has the highest error, even though perceptu-
ally this result was unobjectionable, probably because
viewers have no expectation of consistent motion in
this scenario. The reader will find other observations
of interest in consulting the data given in the table.
In the following subsections, we discuss some
specific videos and give a qualitative assessment of
the results. We attempted to show a range of difficulty
levels, ranging from conventional use cases of natu-
ral motion and time-lapse video through challenging
cases involving human faces and large-scale motion.
0 50 100 150 200
100k
200k
300k
400k
500k
600k
700k
1x1 Kernel
3x3 Kernal
5x5 Kernel
Progressive Kernel
Figure 10: The effect of different kernel sizes on error.
4.2 Natural Motion
Repetitive cyclical motions such as water waves, a
waving flag, or falling snow are good candidates for
palette cycling animations. Handcrafted palette cy-
cling often featured repetitive motions, especially in-
volving water. We show two examples of animated
water in Figures 11 and 12. The recreated seashore
adequately reproduces the motion; fine details are
lost, though an impression of water remains. The
moon example has a particularly good outcome be-
cause of the limited color range of the input, mean-
ing that many palette entries could be used for color
change as opposed to distinct colors.
Figure 11: Shore example. Above: original frames; below:
recreated frames. The patterns of sea waves are reasonably
regular, which helps the algorithm capture the wave move-
ments.
Automated Palette Cycling Animations
121

Figure 12: Moon example. Above: original frames; below:
recreated frames. The original has quite limited color vari-
ation, allowing many palette entries to be used for motion.
4.3 Time Lapse
Time-lapse video is particularly well suited to palette
cycling. Because each frame has its own palette,
large-scale coordinated color changes are easy to
manage. The hotels example shown in Figure 13
provides an example: even though the entire scene
changes color, the underlying structures do not
change and many pixels have the same color trajec-
tory. Consequently, the algorithm manages to capture
all the changes even though virtually no pixel is static.
Notice how the palette gradually darkens as the ani-
mation progresses.
Figure 14 shows an example combining motion
and large-scale change. The large-scale lighting
changes are handled well; local motion is more de-
manding, though, and the water traffic is reproduced
in an impressionistic rather than entirely strict fash-
ion. In the full animation (see supplemental material),
small details such as blinking lights can be seen to be
preserved.
4.4 Larger-Scale Motion
Large-scale motion is a particular challenge for
palette cycling. Whenever two pixels differ at any
point in the animation, they need different indices
in the index map so that they can be distinguished.
Smooth motion therefore requires a very large palette;
Figure 13: Hotels example. The large-scale lighting
changes are represented elegantly through palette cycling.
Figure 14: City-river example. 1st row: original frames;
2nd row: encoded frames with 256 colors. 3rd row: en-
coded frames with 1024 colors, 4th row: encoded frames
with 4096 colors.
Figure 15: Ranger example (Total of 100 frames): The orig-
inal video had a shaky background, forcing the algorithm to
expend a large fraction of palette entries depicting the mo-
tion. This is especially evident when looking at the sides of
the tree trunks: notice the uniform colored bands parallel to
the trees. Additionally, the fast, unpredictable movement of
head and facial features was not captured well.
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
122

Figure 16: Swing example (Total of 40 frames): The swing
is a large object with significant movement, a challenging
case. In the rightmost and leftmost frames, the swing is
relatively stationary and is clearly depicted. In the middle
frame, however, the speed is higher and it becomes quite
blurry.
Figure 17: Guitar example. Above: original frames; below:
reconstructed frames with 256 colors. The color variety and
camera movement make this a particularly challenging case.
with smaller palettes, the motion itself becomes visi-
bly quantized, with a choppy appearance resembling
a low frame rate. The resulting spatial quantization of
movement is a reflection of the underlying index map.
The swing animation demonstrates the outcome
when our process is applied to videos containing
large-scale coherent motion. The swing appears to
jump between positions. Much of the palette is con-
sumed by the varied colors in the background, leaving
only a fraction to encode the motion. Nonetheless, the
motion is recognizable, and because of the clear back-
ground, the context is easily identifiable.
The ranger animation exhibits similar choppiness
and ghosting. This is a more difficult case than the
swing because the camera is moving as well; further,
because the subject of the animation is human, we as
human observers are less tolerant of errors.
4.5 Moving Backgrounds
The ranger animation combines large-scale motion
with a moving camera, or equivalently, a moving
background. Non-static backgrounds are a significant
challenge for palette cycling animations, since the in-
dex map has to manage all color trajectories in the
image. Where many pixels share the same trajectory,
the problem is simplified; in cases like this one, where
many pixels have unique trajectories, the problem is
magnified, and multiple trajectories must be merged.
The guitar sequence further demonstrates the chal-
lenges posed by a moving camera. The result is
grainy as the small palette struggles to cope with the
high number of trajectories, falling back on dithering.
The guitar sequence contains substantial color vari-
ation within a single frame, further raising the chal-
lenge. Nonetheless, despite noticeable deficiencies in
the palette cycling animation, the main objects and ac-
tions are recognizable from the result. This sequence
is considerably more difficult than anything attempted
with previous manual approaches.
4.6 Image Transitions
As a curiosity, we also demonstrate a result from
blending between a sequence of static images. The
images themselves are shown in Figure 18 and the in-
dex map resulting from the optimization can be seen
in Figure 19. The palette cycling animation is pro-
vided in the supplemental material. Despite the dis-
similarity between the images, a single index map
is able to capture both the images themselves and a
smooth transition between them, with the frames re-
producing the images (Figure 18, lower row) being
very close to the originals.
Figure 18: Sequence of static images forming the basis of
an animation. Above: original images. Below: images re-
produced from common index map, palette size 256.
Figure 19: Visualization of index map for the random ex-
ample.
Automated Palette Cycling Animations
123
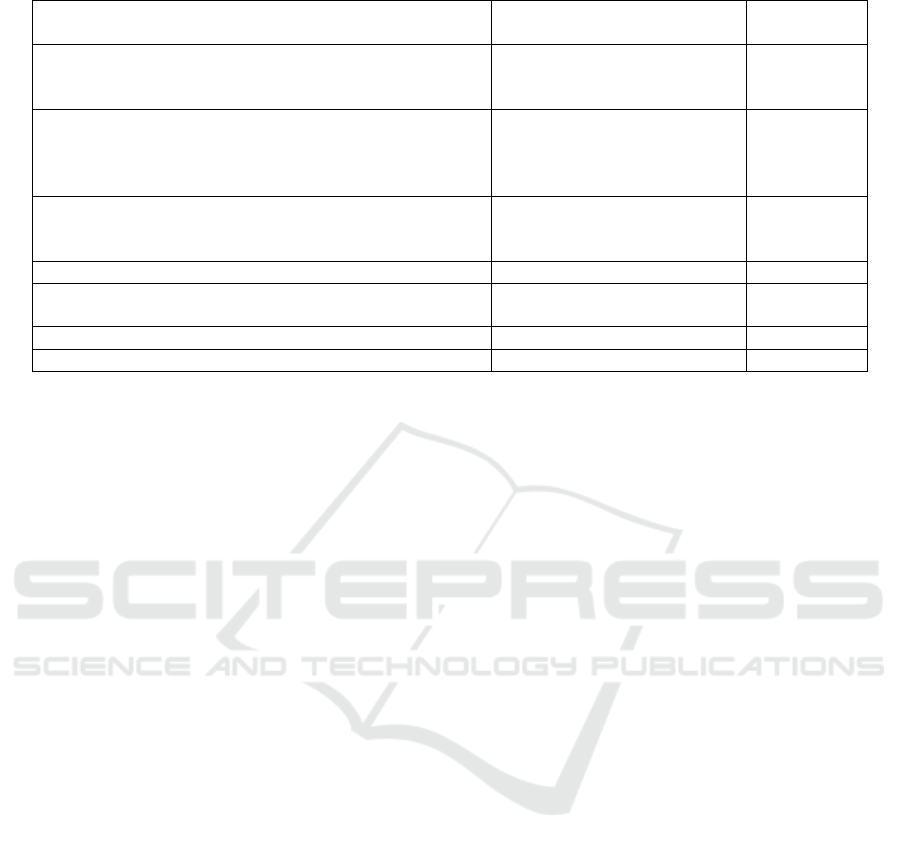
Table 2: Processing time and final error for various configurations.
Configuration Time Error
Video Dimensions Frames Palette Size Palettes Dithering Total (normalized)
Tower 529x320 150
32 4.81 0.69 5.49 1.47
64 5.51 1.08 6.58 1.13
256 9.26 3.19 12.44 0.80
River 853x480 202
32 17.01 1.92 18.93 2.55
256 32.49 8.95 41.44 1.58
1024 102.51 35.90 138.41 1.11
4096 433.11 154.05 587.16 0.74
M.Ferrari 640x480 418
16 23.42 2.08 25.49 3.97
64 28.57 4.50 33.07 0.79
256 38.91 15.26 54.17 0.03
Moon Reflection 720x405 302 32 11.78 1.94 13.72 1.54
Random 1024x650 4
32 1.55 0.30 1.85 13.05
64 1.70 0.36 2.06 10.01
Ranger 1138x640 99 256 35.42 8.06 43.48 3.92
Shore 1280x720 40 64 9.09 1.48 10.57 4.16
5 DISCUSSION
Here we recount some design advice summarizing
the lessons learned from our experiences with au-
tomated palette cycling animations. In general, our
method succeeds at encoding an input video into the
restricted form of a palette cycling animation. How-
ever, not all scenes are equally well suited to such en-
codings. Scenes with relatively static structures, such
as landscapes or cityscapes, can be encoded well even
when the lighting changes dramatically; the per-frame
palettes handle arbitrary lighting changes as long as
the pixel trajectories of multiple locations are coor-
dinated. Animations with large empty regions of the
image (e.g., a uniform sky or a flat, untextured back-
drop) result in superior-quality encodings since more
palette entries can be reserved for encoding motion.
Conversely, large-scale motion such as the ap-
parent motion resulting from moving backgrounds is
more difficult. The output videos begin to exhibit vis-
ible degradation compared to the source, since man-
aging the uncoordinated color changes requires many
separate indices. Considerably larger palette sizes
would be required in order to get substantial improve-
ments. and can result in severe blurring. Animations
that mix large-scale motion and color variation are
particularly challenging, since both phenomena will
place demands on our limited supply of palette en-
tries; again, blurring is a likely outcome. A relatively
simple yet problematic animation is a pan over a com-
plex background (the “Ken Burns effect”), to which
palette cycling as presently conceived is particularly
poorly suited. More generally, animated fine details
are likely to suffer loss in encoding, with facial fea-
tures being challenging due to a combination of mo-
tion, color variation, and sensitivity of observers.
We used a single index map for the entire se-
quence. For short sequences, even radically differ-
ent frames can be well encoded (e.g., see the “ran-
dom” sequence). As the input becomes longer, the
output quality will degrade; the rate of quality loss
depends on the variability of frames, with more con-
sistency between frames being easier to handle. For
very long sequences, we recommend storing multiple
index maps rather than relying on a single map.
Palette cycling is of greatest value when memory
constraints are severe. It is natural to wonder what
proportion of the memory usage is due to the index
map and what proportion is consumed by the palettes.
The memory footprint of an encoded video depends
on the frame dimensions and the palette size, and is
not affected by the video content. Consider a video
with 100 frames, each 0.25 megapixels, and a palette
size of 256; the encoded video would require 0.25 MB
for the index map and 100×256 ×3 bytes for the per-
frame palettes, for a total size of 0.33 MB. For com-
parison, an animated GIF with the same parameters
(100 frames at 0.25 megapixels each) would require
100 × 0.25 = 25 MB, plus a negligible additional ex-
pense for the global palette. The animated GIF can
be compressed to reduce file size, but must be decom-
pressed for playback.
6 CONCLUSION
Palette cycling is an animation technique which uses
a fixed set of indices throughout the entire sequence
of frames, with a per-frame palette. By changing
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
124

the palette from frame to frame, lighting changes and
apparent motion can be induced. In this paper, we
demonstrated an optimization-based method for cre-
ating palette-cycling animations from arbitrary input
videos. Our technique involves alternating between
finding a set of per-frame palettes given a set of palette
indices, and then finding the pixel indices given a
fixed set of palettes. While many handcrafted palette
animations have been created historically, this paper
is the first to automate palette cycling.
The method produces quite good results for tradi-
tional use cases such as scenes with minor natural mo-
tion or time-lapse videos. Intrinsically difficult sce-
narios including large-scale motion and moving back-
grounds are less successful and offer opportunities for
further investigation.
The present method takes only an input video,
without annotations. Better results might be achieved
by allowing a user to mark regions of interest, and pri-
oritizing fidelity in those areas while discounting error
outside the important regions. Of course, the region
of interest determination could also be automated. It
might also be worthwhile to preprocess the video to
reduce the number of colors, rather than strictly rely-
ing on dithering; for example, L0 quantization could
be employed to reduce gradients.
We concentrated on photorealistic videos, while
historical palette cycling used pixel art. A possible
direction would be to jointly construct a pixel art styl-
ization and a palette cycling animation from an input
video. Further, the animation could itself be stylized,
as in handcrafted palette animations: one might imag-
ine artist-drawn tracks for particle effects or lighting
which could build on an input scene or video. Over-
all, we hope that this paper can spark renewed interest
in the fascinating medium of palette cycling.
ACKNOWLEDGEMENTS
Thanks to the GIGL group for helpful suggestions as
this project developed. The project received financial
support from Carleton University and from NSERC.
We want to thank Mark Ferrari for his kind words of
encouragement as we were beginning this project and
for his permission to reproduce frames from the jun-
gle animation, shown in Figure 2.
REFERENCES
Bayer, B. E. (1973). An optimum method for two-level ren-
dition for continuous tone pictures. Proc. of IEEE Int’l
Communication Conf., 1973, pages 2611–2615.
Chang, J., Alain, B., and Ostromoukhov, V. (2009).
Structure-aware error diffusion. ACM Trans. Graph.,
28(5):1–8.
Eschbach, R. and Knox, K. T. (1991). Error-diffusion al-
gorithm with edge enhancement. J. Opt. Soc. Am. A,
8(12):1844–1850.
Floyd, R. W. and Steinberg, L. (1976). An adaptive algo-
rithm for spatial greyscale. Proceedings of the Society
for Information Display, 17(2):75–77.
Franchini, G., Cavicchioli, R., and Hu, J. C. (2019).
Stochastic floyd-steinberg dithering on GPU: image
quality and processing time improved. In 2019 Fifth
International Conference on Image Information Pro-
cessing (ICIIP), pages 1–6.
Gerstner, T., DeCarlo, D., Alexa, M., Finkelstein, A., Gin-
gold, Y., and Nealen, A. (2012). Pixelated image ab-
straction. In Proceedings of the tenth annual sympo-
sium on non-photorealistic animation and rendering
(NPAR 2012), pages 29–36.
Gervautz, M. and Purgathofer, W. (1988). A simple
method for color quantization: Octree quantization. In
Magnenat-Thalmann, N. and Thalmann, D., editors,
New Trends in Computer Graphics, pages 219–231,
Berlin, Heidelberg. Springer Berlin Heidelberg.
Heckbert, P. (1982). Color image quantization for frame
buffer display. In Proceedings of the 9th Annual Con-
ference on Computer Graphics and Interactive Tech-
niques, SIGGRAPH ’82, page 297–307, New York,
NY, USA. Association for Computing Machinery.
Huang, H.-Z., Xu, K., Martin, R. R., Huang, F.-Y., and Hu,
S.-M. (2016). Efficient, edge-aware, combined color
quantization and dithering. IEEE Transactions on Im-
age Processing, 25(3):1152–1162.
Inglis, T. and Kaplan, C. (2012). Pixelating vector line art.
In Proceedings of the tenth annual symposium on non-
photorealistic animation and rendering (NPAR 2012),
pages 21–28.
Joy, G. and Xiang, Z. (1993). Center-cut for color-image
quantization. The Visual Computer, 10(1):62–66.
Kim, T.-H. and Park, S. I. (2018). Deep context-aware de-
screening and rescreening of halftone images. ACM
Trans. Graph., 37(4).
Kwak, N.-j., Ryu, S.-p., and Ahn, J.-h. (2006). Edge-
enhanced error diffusion halftoning using human vi-
sual properties. In 2006 International Conference
on Hybrid Information Technology, volume 1, pages
499–504.
Li, X. (2006). Edge-directed error diffusion halftoning.
IEEE Signal Processing Letters, 13(11):688–690.
Liu, Y.-F. and Guo, J.-M. (2015). Dot-diffused halftoning
with improved homogeneity. IEEE Transactions on
Image Processing, 24(11):4581–4591.
Orchard, M. T., Bouman, C. A., et al. (1991). Color quan-
tization of images. IEEE transactions on signal pro-
cessing, 39(12):2677–2690.
Ozdemir, D. and Akarun, L. (2001). Fuzzy algorithms for
combined quantization and dithering. IEEE Transac-
tions on Image Processing, 10(6):923–931.
Automated Palette Cycling Animations
125

Pang, W.-M., Qu, Y., Wong, T.-T., Cohen-Or, D., and Heng,
P.-A. (2008). Structure-aware halftoning. ACM Trans.
Graph., 27(3):1–8.
Park, H. J., Kim, K. B., and Cha, E.-Y. (2016). An ef-
fective color quantization method using octree-based
self-organizing maps. Intell. Neuroscience, 2016.
Puzicha, J., Held, M., Ketterer, J., Buhmann, J. M., and
Fellner, D. W. (2000). On spatial quantization of
color images. IEEE Transactions on image process-
ing, 9(4):666–682.
Xia, M., Hu, W., Liu, X., and Wong, T.-T. (2021). Deep
halftoning with reversible binary pattern. In 2021
IEEE/CVF International Conference on Computer Vi-
sion (ICCV), pages 13980–13989.
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
126
