
Explainable Deep Semantic Segmentation for Flood Inundation Mapping
with Class Activation Mapping Techniques
Jacob Sanderson
1 a
, Hua Mao
1
, Naruephorn Tengtrairat
2
, Raid Rafi Al-Nima
3
and Wai Lok Woo
1 b
1
Department of Computer and Information Sciences, Northumbria University, Newcastle Upon Tyne, U.K.
2
School of Software Engineering, Payap University, Chiang Mai, Thailand
3
Technical Engineering College, Northern Technical University, Mosul, Iraq
Keywords:
Deep Learning, Semantic Segmentation, Explainable Artificial Intelligence, Flood Inundation Mapping,
Satellite Imagery.
Abstract:
Climate change is causing escalating extreme weather events, resulting in frequent, intense flooding. Flood
inundation mapping is a key tool in com-bating these flood events, by providing insight into flood-prone areas,
allowing for effective resource allocation and preparation. In this study, a novel deep learning architecture for
the generation of flood inundation maps is presented and compared with several state-of-the-art models across
both Sentinel-1 and Sentinel-2 imagery, where it demonstrates consistently superior performance, with an
Intersection Over Union (IOU) of 0.5902 with Sentinel-1, and 0.6984 with Sentinel-2 images. The importance
of this versatility is underscored by visual analysis of images from each satellite under different weather
conditions, demonstrating the differing strengths and limitations of each. Explainable Artificial Intelligence
(XAI) is leveraged to interpret the decision-making of the model, which reveals that the proposed model not
only provides the greatest accuracy but exhibits an improved ability to confidently identify the most relevant
areas of an image for flood detection.
1 INTRODUCTION
In recent years, climate change is causing rising
sea-levels (Rosier et al., 2023) and extreme weather
events, which is resulting in a rapid increase in the
occurrence and intensity of flooding (Schreider et al.,
2000), with devastating consequences for communi-
ties worldwide. Flood inundation mapping has a piv-
otal role in protecting affected communities by pro-
viding insights into potential flood extents, identify-
ing at-risk areas, and enabling effective resource allo-
cation (Sahana and Patel, 2019).
Given the rise in the frequency of floods, the time-
liness of flood inundation map generation is of grow-
ing importance. Traditional methods often rely on
manual preprocessing of images making them labour-
intensive and time-consuming to implement (Landuyt
et al., 2018). As computational power has increased,
deep learning has emerged as an effective technique,
with Convolutional Neural Networks (CNNs), prov-
ing most effective (Tavus et al., 2022). CNNs, of-
a
https://orcid.org/0009-0002-5724-6637
b
https://orcid.org/0000-0002-8698-7605
ten in a fully convolutional network (FCN) architec-
ture, segment images into water and non-water pix-
els, outperforming classical machine learning meth-
ods (Gebrehiwot and Hashemi-Beni, 2020). Increas-
ingly, models are employing encoder-decoder archi-
tectures, with U-Net and DeepLab variants being pop-
ular choices (Katiyar et al., 2021; Ghosh et al., 2022;
Helleis et al., 2022; Muszynski et al., 2022; Li and
Demir, 2023; Paul and Ganju, 2021; Yuan et al., 2021;
Sanderson et al., 2023a; Sanderson et al., 2023b).
The primary drawback of employing deep learn-
ing lies in its lack of transparency, with deep neu-
ral net-works often being referred to as ‘black box’
models. While these models can achieve impressive
accuracy in generating flood inundation maps, un-
derstanding the rationale behind their decisions can
be challenging. This raises concerns about the trust-
worthiness of these models, as it becomes difficult to
verify that their decisions are not influenced by bias
or error. To address this issue, explainable artificial
intelligence (XAI) has emerged as a solution. XAI
aims to provide human-understandable explanations
for the decisions made by deep neural networks and
other black box models (Mirzaei et al., 2024). In the
1028
Sanderson, J., Mao, H., Tengtrairat, N., Al-Nima, R. and Woo, W.
Explainable Deep Semantic Segmentation for Flood Inundation Mapping with Class Activation Mapping Techniques.
DOI: 10.5220/0012432300003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 3, pages 1028-1035
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

context of flood inundation mapping, XAI could of-
fer valuable insights into the factors influencing flood
extent prediction, enhancing the trust of stakehold-
ers. Despite this, as far as the authors are aware, re-
search in XAI for flood modelling is limited. Exist-
ing studies mainly focus on explaining classical ma-
chine learning algorithms using model-agnostic XAI
techniques like LIME and SHAP (Prasanth Kadiyala
and Woo, 2021; Pradhan et al., 2023). The use of
classical machine learning limits their ability to cap-
ture complex relationships and results in lower accu-
racy. The model-agnostic algorithms used in these
studies are unable to access the inner workings of
the predictive models, limiting the insights they can
provide. To address this, model-specific XAI algo-
rithms exist, which can provide more fine-grained ex-
planations, tailored to a specific model. To explain
CNN decision-making, techniques like class activa-
tion mapping (CAM) (Zhou et al., 2016) and a grow-
ing number of modified CAM techniques are em-
ployed (Chattopadhay et al., 2018; Selvaraju et al.,
2017; Fu et al., 2020; Wang et al., 2020; Muhammad
and Yeasin, 2020; Draelos and Carin, 2020). They
visualize important features without significantly af-
fecting model performance. The majority of these
techniques are well-demonstrated in image classifi-
cation, however in semantic segmentation gradient
weighted class activation mapping (Grad-CAM) (Sel-
varaju et al., 2017) is by far the most well-used. In im-
age classification, it has been noted that Grad-CAM
has a substantial shortcoming, in the gradient averag-
ing step often regions are highlighted that the model
did not use, leading to an unfaithful interpretation. To
overcome this, methods such as high-resolution class
activation mapping (HiResCAM) (Draelos and Carin,
2020) have been proposed to provide a more faithful
explanation, however, the development of this method
for semantic segmentation has yet to be investigated,
as far as the authors are aware.
In addition to model selection, the choice of in-
put data type is a crucial consideration in develop-
ing flood inundation maps. Two of the primary sen-
sor types used on board satellites are synthetic aper-
ture radar (SAR), and optical. The European Space
Agency provides free access to images taken by their
Sentinel missions, making them a popular and ac-
cessible choice for researchers and practitioners in
the field. Within the Sentinel missions, Sentinel-1,
which makes use of a SAR instrument, and Sentinel-
2 equipped with a multi-spectral optical instrument
(MSI) are the most commonly used in mapping flood
extent. Each of these instruments has its own dis-
tinct advantages and limitations. SAR can penetrate
through cloud cover and provides its own light source,
meaning that images can be taken in any weather or
light conditions. However, it is susceptible to speckle
noise, which can make detection of the true signal
more challenging. In contrast, MSI delivers imagery
with high spatial and spectral resolution, providing a
greater wealth of information for land cover and wa-
ter classification, but is not able to penetrate clouds as
effectively (Konapala et al., 2021).
This work aims to develop a novel architecture
for flood inundation mapping and demonstrate its ef-
fectiveness through comparative analysis with several
state-of-the-art models. The influence of input data
is also assessed by applying the proposed model to
Sentinel-1 and Sentinel-2, analysing both the overall
quantitative performance, as well as visually assess-
ing the quality of the generated maps in both clear and
cloud-covered conditions. Finally, XAI is employed
to interpret the decision-making of the models, as well
as to provide deeper insight into how the different in-
put data types influence the behaviour of the model.
This study will explore the suitability of HiResCAM
as an explainability method for semantic segmenta-
tion, in comparison with results from Grad-CAM.
2 METHODOLOGY
2.1 Dataset
The Sen1Floods11 dataset (Bonafilia et al., 2020) is
used in this study, which consists of 446 hand-labelled
images from each of the Sentinel-1 and Sentinel-
2 satellites, with a total of 892 images from 11
global flood events in Bolivia, Ghana, India, Cambo-
dia, Nigeria, Pakistan, Paraguay, Somalia, Spain, Sri
Lanka, and the USA. These flood events were sam-
pled as both Sentinel-1 and coincident Sentinel-2 im-
ages were available within a maximum of 2 days of
each other.
The Sentinel-1 images are taken with a C-band
SAR instrument in the interferometric wide swath
(IW) mode, which allows a wide area to be cov-
ered, making it suitable for large-scale flood map-
ping. The ground resolution of these images is 10m.
The Sentinel-1 satellite offers different polarization
modes, where the images in this dataset are taken
in vertical transmit, vertical and horizontal receive
(VV + VH), offering enhanced information for im-
proved water detection, with relatively low computa-
tional cost. The Sentinel-2 images are taken with an
MSI with a 290km field of view, capturing 13 spectral
bands in the visible light, near-infrared and shortwave
infrared spectrum. The ground resolution of these
bands varies, so the images have been re-sampled to
Explainable Deep Semantic Segmentation for Flood Inundation Mapping with Class Activation Mapping Techniques
1029

Figure 1: Architecture diagram of the proposed model.
10m for each to ensure consistency in the analysis.
2.2 Proposed Model
In flood inundation mapping, conventional fully con-
volutional neural networks (CNNs) have been widely
used but face challenges such as information loss and
low-resolution predictions. To address these issues,
encoder-decoder architectures are used by most re-
cent works in segmentation, which are able to cap-
ture high-level semantic information while preserving
spatial detail much more effectively.
The proposed model takes inspiration from this
and adopts a dual encoder-decoder architecture, as
shown in Figure 1. One encoder is a powerful
CNN pre-trained on ImageNet, while the other is a
lightweight CNN, ensuring a balance between accu-
racy and computational efficiency. By employing two
base models, the robustness of the final model is im-
proved by providing more diverse input representa-
tions to the final classifier and enabling the compen-
sation for limitations in one model with the strengths
of the other and vice versa.
The powerful encoder employs convolutional and
identity blocks, mitigating issues like vanishing gra-
dients. The lightweight encoder features bottleneck
blocks for computational efficiency. In the decoder,
transposed convolutions perform upsampling to re-
cover spatial information and performance-enhancing
features, including dense skip pathways and deep su-
pervision are integrated to improve the model’s accu-
racy and convergence speed.
Atrous convolution is introduced to the
lightweight encoder to address spatial resolution
reduction. It enhances the field of view with-
out increasing computational costs. Additionally,
spatial pyramid pooling and depthwise separable
convolution are employed in its decoder module
to capture multi-scale information while managing
computational complexity.
2.3 Class Activation Mapping
Techniques
CAM is a widely used XAI technique in CNN inter-
pretation. In CAM, the architecture of a CNN is mod-
ified by replacing fully connected layers with global
average pooling layers, to provide class-specific fea-
ture maps, showing the localization of a CNN (Zhou
et al., 2016). This modification requires the retrain-
ing of the model and also limits the variety of CNN
architectures that it will perform well with.
To overcome this, several extended versions of
CAM have been introduced, most notably, Grad-
CAM (Selvaraju et al., 2017). In Grad-CAM, the gra-
dients of a target concept as they flow into a target
layer are used to produce the class activation map, by
first finding the gradient for the target class with re-
spect to the feature map activations, then global av-
erage pooling to give the importance weight for each
neuron. Following this, a weighted combination of
the forward activation maps is computed and ReLU is
applied to ensure only the pixels with a positive influ-
ence on the target class are highlighted.
Due to the gradient averaging step, it has been
identified that Grad-CAM does not always reflect
the locations of the image that the model used for
training, and so can produce misleading explana-
tions, often resulting in smoother heatmaps that sug-
gest a larger area of the image was considered in the
model’s decision making. To overcome this limita-
tion, HiResCAM (Draelos and Carin, 2020) generates
its explanations through element-wise multiplication
of the gradients with the feature maps, then summing
over the feature dimensions.
2.4 State-of-the-Art Models
To best demonstrate the superior performance of the
proposed model, a comparative analysis is conducted
with two state-of-the-art models, DeepLabV3+ and
U-Net++, each with both a ResNet50 and Mo-
bileNet
V2 back-bone. These models have been se-
lected as they remain two of the most sophisticated
and commonly used methods for semantic segmenta-
tion.
DeepLabV3+ incorporates atrous convolution and
spatial pyramid pooling to effectively handle seg-
mentation tasks involving multiple objects at differ-
ing scales. A streamlined decoder is then employed,
offering control of the density of the encoder fea-
tures, as well as restoring the precise object bound-
aries (Chen et al., 2018). U-Net++ involves a CNN
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
1030

as the encoder for feature extraction, followed by up-
sampling by the decoder to in-crease the output res-
olution. Dense skip connections are employed to re-
duce the semantic gap between the en-coder and de-
coder, as well as deep supervision to facilitate versa-
tile operation modes (Zhou et al., 2018).
ResNet50 consists of residual blocks, each involv-
ing a sequence of 3x3 convolution, batch normaliza-
tion and ReLU activation. Skip connections are em-
ployed after each block enabling certain layers to be
bypassed, ad-dressing issues related to model degra-
dation and vanishing gradients (He et al., 2016).
MobileNet v2 is a streamlined architecture fea-
turing depthwise separable convolution, which can
reduce computational complexity while maintain-
ing high performance. An inverted residual block
with linear bottle-neck is incorporated which takes a
compressed low-dimensional representation and ex-
pands it into a higher dimension, applying lightweight
depthwise separable convolution, before projecting
the features back to a low-dimensional representation.
This minimizes the memory requirements through the
reduction of parameters (Sandler et al., 2019).
2.5 Experiments
The Pytorch deep learning framework is used to de-
velop the models used in this study, accelerated with
the use of NVIDIA A100 graphics processing unit
(GPU), accessed through the cloud. The images and
labels in the dataset are split into training, validation
and testing sets, with 251 training, 89 validation and
90 testing samples for each satellite. The training
images are augmented through random flipping and
cropping of the training images create more variation
in the data, improving the robustness of the model.
The validation and testing images are cropped at a
fixed point to ensure consistency in visualizations. All
images are normalized by the mean and standard de-
viation, ensuring all values are within the same scale
for effective optimization. A batch size of 16 is used
for training the models, with the Cross Entropy Loss
function, which measures the similarity between the
true and predicted values.The Sen1Floods11 dataset
is imbalanced, with a higher number of non-water
pixels. To address this, a weighting of 8:1 is applied
within the loss function, placing 8 times the impor-
tance on the water class to ensure the model places
more importance on correctly identifying these pix-
els.
The optimizer AdamW is used with a learning rate
of 5e-4. AdamW is a stochastic gradient descent-
based optimization method, where the first-order and
second-order moments are adaptively estimated, with
an improved weight decay method through decou-
pling the weight decay from the optimization steps
(Loshchilov and Hutter, 2019). Cosine Annealing
Warm Restarts is used to schedule the learning rate,
where the learning rate is decreased from a high to a
low value, and then restarts at a previous good weight
(Loshchilov and Hutter, 2017).
The model was trained over 250 epochs, being
evaluated against the accuracy, loss, F1 score, and In-
tersection over Union (IOU) on both the training, then
the validation set to ensure that the model can gener-
alise to unseen data. The model with the best valida-
tion IOU is saved and evaluated on the testing data,
against the same metrics.
3 EXPERIMENTAL RESULTS
3.1 Quantitative Results
The performance of each model against the met-
rics described in section 3.5 is given in Table 1.
These results highlight the proposed model’s superi-
ority for both image types. In the case of Sentinel-
1 images, U-Net++ and DeepLabV3+ yield similar
IOU values, with the U-Net++ model employing the
ResNet50 backbone and the DeepLabV3+ model with
the MobileNet V2 backbone slightly surpassing the
other two. Furthermore, the DeepLabV3+ model with
the MobileNet V2 backbone excels in the F1 score.
When analysing Sentinel-2 images, performance im-
proves compared to Sentinel-1. Both U-Net++ mod-
els outperform the DeepLabV3+ models. It is impor-
tant to note that performance varies between the two
backbones, with ResNet50 excelling in conjunction
with U-Net++ with the Sentinel-1 images, while Mo-
bileNet V2 performs slightly better in all other cases.
3.2 Visualizations
Figures 2 to 6 show visualizations of the flood inunda-
tion maps generated by each model, and the explana-
tions provided by both Grad-CAM and HiResCAM,
with each depicting an example image in clear con-
ditions and a cloud-covered image for both Sentinel-
1 and Sentinel-2. These images illustrate that the
models achieving the best performance across eval-
uation metrics, especially IOU, generate highly de-
tailed segmentation masks, resulting in more precise
maps. Conversely, models with poorer performance
produce coarser masks, featuring an increased num-
ber of false positive pixel classifications. Notably, the
proposed model generates inundation maps that are
Explainable Deep Semantic Segmentation for Flood Inundation Mapping with Class Activation Mapping Techniques
1031
Table 1: Accuracy, loss, F1 score and IOU for each model.
Model Accuracy Loss F1 Score IOU
Sentinel-1
U-Net++ ResNet50 0.9413 0.3054 0.6127 0.5642
U-Net++ MobileNet V2 0.9400 0.2907 0.6070 0.5440
DeepLabV3+ ResNet50 0.9415 0.2740 0.6444 0.5464
DeepLabV3+ MobileNet V2 0.9371 0.3099 0.6372 0.5660
Proposed Model 0.9730 0.2390 0.7327 0.5902
Sentinel-2
U-Net++ ResNet50 0.9382 0.1524 0.7081 0.6514
U-Net++ MobileNet V2 0.9468 0.1345 0.7053 0.6583
DeepLabV3+ ResNet50 0.9525 0.1730 0.7162 0.6427
DeepLabV3+ MobileNet V2 0.9412 0.1917 0.7209 0.6456
Proposed Model 0.9691 0.1129 0.7894 0.6984
more closely aligned with the ground truth than any
other model.
Sentinel-1 demonstrates overall modest perfor-
mance, particularly struggling in areas with finer de-
tail. In contrast, Sentinel-2, while presenting more
distinct flood maps in clear conditions, faces signifi-
cant challenges in cloud-covered scenarios, where the
maps are more poorly defined. Notably, the image
taken in clear conditions includes some background
areas which appear similar to the water pixels in the
Sentinel-1 image, while in the Sentinel-2 image, there
is more clear contrast between the two, leading to
the Sentinel-1 trained models either falsely classify-
ing background areas as water, or underpredicting the
water covered areas.
The class activation maps visualise the impor-
tant features for each model’s decision-making and
demonstrate that the proposed model not only gener-
ated the most accurate flood inundation maps, but also
made the most appropriate decisions, placing higher
confidence on the most relevant pixels, and lower
importance on the non-flooded pixels than any other
model. It is also evident from these images that Grad-
CAM does produce a smoothed class activation map,
highlighting a larger area as important, which aligns
with the assertion that its gradient averaging causes
unfaithful interpretation. HiResCAM provides a class
activation map equally understandable to humans as
Grad-CAM but presents a more faithful representa-
tion of the model’s decision-making process.
3.3 Discussion
The model proposed in this work excels in generat-
ing flood maps from both Sentinel-1 and Sentinel-2
imagery, with a higher level of accuracy than any of
the state-of-the-art models. Notably, there are per-
formance disparities observed between the models
Figure 2: Visualizations generated by U-Net++ with
ResNet50 backbone for (A) a Sentinel-1 image in clear
conditions, (B) a Sentinel-1 image in cloud-covered con-
ditions, (C) a Sentinel-2 image in clear conditions and (D)
a Sentinel-2 image in cloud-covered conditions.
when trained with Sentinel-1 and Sentinel-2, where
DeepLabV3+ with MobileNet V2 exhibited the high-
est IOU in Sentinel-1 imagery, while U-Net++ with
MobilNet V2 was superior with Sentinel-2. The pro-
posed model, outperforming all state-of-the-art mod-
els across both image types, stands out as the most
versatile option. The visual analysis of the flood inun-
dation maps demonstrates how crucial this versatility
is, as each satellite image type demonstrates superior
performance in certain conditions, so the ability to
easily change the data type without needing to change
the model is beneficial. With Sentinel-1 images, the
models struggle to detect finer details and frequently
overpredict water-covered areas, resulting in a coarser
inundation map. Conversely, with Sentinel-2 images
the fine detail is much more easily detected, how-ever,
cloud coverage significantly impacts performance, re-
sulting in a map with insufficient detail.
The class activation maps provide further insights
into the superior performance of the proposed model.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
1032
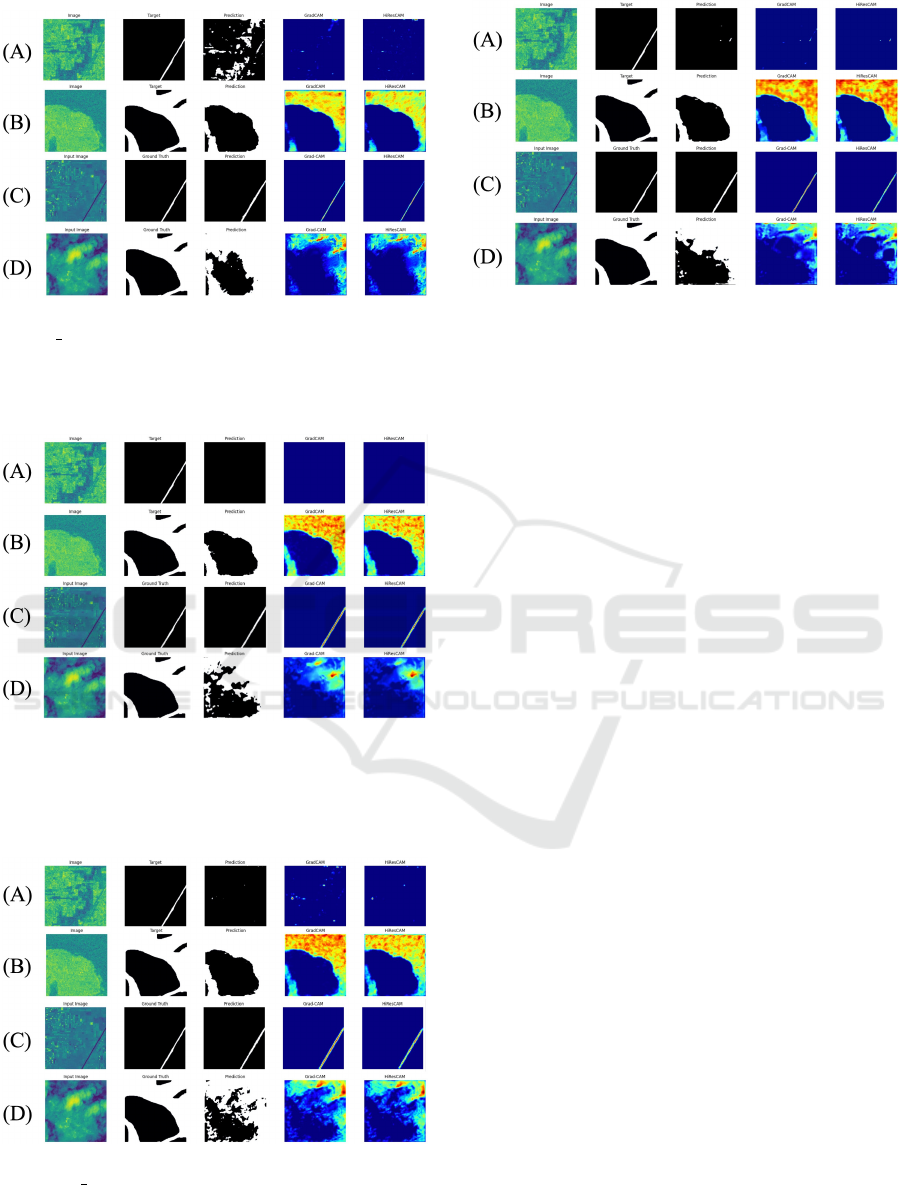
Figure 3: Visualizations generated by U-Net++ with Mo-
bileNet V2 backbone for (A) a Sentinel-1 image in clear
conditions, (B) a Sentinel-1 image in cloud-covered condi-
tions, (C) a Sentinel-2 image in clear conditions and (D) a
Sentinel-2 image in cloud-covered conditions.
Figure 4: Visualizations generated by DeepLabV3+ with
ResNet50 backbone for (A) a Sentinel-1 image in clear
conditions, (B) a Sentinel-1 image in cloud-covered con-
ditions, (C) a Sentinel-2 image in clear conditions and (D)
a Sentinel-2 image in cloud-covered conditions.
Figure 5: Visualizations generated by DeepLabV3+ with
MobileNet V2 backbone for (A) a Sentinel-1 image in clear
conditions, (B) a Sentinel-1 image in cloud-covered condi-
tions, (C) a Sentinel-2 image in clear conditions and (D) a
Sentinel-2 image in cloud-covered conditions.
Figure 6: Visualizations generated by the proposed model
for (A) a Sentinel-1 image in clear conditions, (B)
a Sentinel-1 image in cloud-covered conditions, (C) a
Sentinel-2 image in clear conditions and (D) a Sentinel-2
image in cloud-covered conditions.
While many of the flood inundation map visualiza-
tions, particularly the cloud-covered Sentinel-1 im-
age, look similar across each model, the class acti-
vation maps reveal discrepancies in how the models
made the decisions. For instance, the U-Net++ mod-
els both have a significantly lower magnitude of im-
portance placed on the relevant pixels for this image.
However, they place a higher magnitude of impor-
tance on the irrelevant pixels for the Sentinel-1 im-
age in clear conditions. The proposed model con-
sistently assigns a higher magnitude of importance to
the flooded areas, and a lower magnitude to the non-
flooded areas, demonstrating that it has more effec-
tively learned to delineate floods with greater confi-
dence than any of the state-of-the-art models. This is
a crucial consideration for the employment of a model
in a flood inundation mapping system, as it shows that
the model has more effectively learned how to iden-
tify flooded areas, so can be better trusted to correctly
identify floods in practice.
It was observed that the class activation maps gen-
erated with the use of Grad-CAM are smoothed due
to the gradient averaging step, bringing attention to a
larger area of the image than the model truly focuses
on. This brings into question the faithfulness of the in-
terpretation of the models. The explanations provided
by Grad-CAM generally present a more favourable
view of the models’ performance than HiResCAM,
potentially leading to misplaced trust in the models’
abilities. This could have potentially catastrophic im-
plications for flood mapping, as this could lead to in-
accurate flood maps being generated, leading to inap-
propriate resource allocation and risk assessment.
Explainable Deep Semantic Segmentation for Flood Inundation Mapping with Class Activation Mapping Techniques
1033

4 CONCLUSIONS
This study addresses the urgent need for timely and
accurate flood inundation mapping in the face of in-
creasing climate-induced challenges. We introduce
a novel dual encoder-decoder architecture that con-
sistently demonstrates superiority over state-of-the-
art models across both Sentinel-1 and Sentinel-2 im-
ages, as evidenced by comprehensive quantitative and
visual analyses. The versatility of this model is
crucial, highlighted through comparative analyses of
each satellite image under different conditions, re-
vealing strengths and limitations in various scenarios.
XAI is leveraged to better understand the
decision-making process of these models. It is shown
that not only is the proposed model the most accurate,
but it has also learned to detect flooded areas more ef-
fectively with greater confidence, showcasing its im-
proved trustworthiness for practical applications.
Despite the success of the proposed model, further
refinement techniques should be incorporated in the
future to enhance segmentation results, such as con-
ditional or Markov random fields. Attention mech-
anisms have also demonstrated superior results in a
range of computer vision tasks, particularly channel
and spatial attention. The incorporation of these tech-
niques can enhance the interpretability of the model
by highlighting the regions that the model paid atten-
tion to, without the need for additional post-hoc XAI
algorithms.
The use of additional data is likely to improve the
results of the work. Deep learning models continue
to im-prove as more data is added, allowing them to
learn more complex feature representations more ef-
fectively. The inclusion of different data types, such
as Digital Elevation Models (DEM) and Light Detec-
tion and Ranging (LiDAR), can provide more detailed
information about the topography of an area. This en-
ables the models to generate more precise flood maps,
as well as more detailed explanations through XAI re-
garding how environmental factors impact flood inun-
dation.
REFERENCES
Bonafilia, D., Tellman, B., Anderson, T., and Issenberg,
E. (2020). Sen1floods11: A georeferenced dataset
to train and test deep learning flood algorithms for
sentinel-1. In Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
Workshops, pages 210–211.
Chattopadhay, A., Sarkar, A., Howlader, P., and Balasub-
ramanian, V. N. (2018). Grad-cam++: Generalized
gradient-based visual explanations for deep convolu-
tional networks. In 2018 IEEE winter conference on
applications of computer vision (WACV), pages 839–
847. IEEE.
Chen, L.-C., Zhu, Y., Papandreou, G., Schroff, F., and
Adam, H. (2018). Encoder-decoder with atrous sepa-
rable convolution for semantic image segmentation. In
Proceedings of the European conference on computer
vision (ECCV), pages 801–818.
Draelos, R. L. and Carin, L. (2020). Use hirescam instead
of grad-cam for faithful explanations of convolutional
neural networks. arXiv preprint arXiv:2011.08891.
Fu, R., Hu, Q., Dong, X., Guo, Y., Gao, Y., and Li, B.
(2020). Axiom-based grad-cam: Towards accurate vi-
sualization and explanation of cnns. arXiv preprint
arXiv:2008.02312.
Gebrehiwot, A. and Hashemi-Beni, L. (2020). Automated
indunation mapping: comparison of methods. In
IGARSS 2020-2020 IEEE International Geoscience
and Remote Sensing Symposium, pages 3265–3268.
IEEE.
Ghosh, B., Garg, S., and Motagh, M. (2022). Automatic
flood detection from sentinel-1 data using deep learn-
ing architectures. ISPRS Annals of the Photogramme-
try, Remote Sensing and Spatial Information Sciences,
3:201–208.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Helleis, M., Wieland, M., Krullikowski, C., Martinis, S.,
and Plank, S. (2022). Sentinel-1-based water and
flood mapping: Benchmarking convolutional neural
networks against an operational rule-based processing
chain. IEEE Journal of Selected Topics in Applied
Earth Observations and Remote Sensing, 15:2023–
2036.
Katiyar, V., Tamkuan, N., and Nagai, M. (2021). Near-
real-time flood mapping using off-the-shelf models
with sar imagery and deep learning. Remote Sensing,
13(12):2334.
Konapala, G., Kumar, S. V., and Ahmad, S. K. (2021). Ex-
ploring sentinel-1 and sentinel-2 diversity for flood in-
undation mapping using deep learning. ISPRS Journal
of Photogrammetry and Remote Sensing, 180:163–
173.
Landuyt, L., Van Wesemael, A., Schumann, G. J.-P.,
Hostache, R., Verhoest, N. E., and Van Coillie, F. M.
(2018). Flood mapping based on synthetic aper-
ture radar: An assessment of established approaches.
IEEE Transactions on Geoscience and Remote Sens-
ing, 57(2):722–739.
Li, Z. and Demir, I. (2023). U-net-based semantic clas-
sification for flood extent extraction using sar im-
agery and gee platform: A case study for 2019 cen-
tral us flooding. Science of The Total Environment,
869:161757.
Loshchilov, I. and Hutter, F. (2017). Sgdr: Stochastic gra-
dient descent with warm restarts.
Loshchilov, I. and Hutter, F. (2019). Decoupled weight de-
cay regularization.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
1034

Mirzaei, S., Mao, H., Al-Nima, R. R. O., and Woo, W. L.
(2024). Explainable ai evaluation: A top-down ap-
proach for selecting optimal explanations for black
box models. Information, 15(1).
Muhammad, M. B. and Yeasin, M. (2020). Eigen-cam:
Class activation map using principal components. In
2020 international joint conference on neural net-
works (IJCNN), pages 1–7. IEEE.
Muszynski, M., H
¨
olzer, T., Weiss, J., Fraccaro, P., Zortea,
M., and Brunschwiler, T. (2022). Flood event detec-
tion from sentinel 1 and sentinel 2 data: Does land
use matter for performance of u-net based flood seg-
menters? In 2022 IEEE International Conference on
Big Data (Big Data), pages 4860–4867. IEEE.
Paul, S. and Ganju, S. (2021). Flood segmentation on
sentinel-1 sar imagery with semi-supervised learning.
arXiv preprint arXiv:2107.08369.
Pradhan, B., Lee, S., Dikshit, A., and Kim, H. (2023). Spa-
tial flood susceptibility mapping using an explainable
artificial intelligence (xai) model. Geoscience Fron-
tiers, 14(6):101625.
Prasanth Kadiyala, S. and Woo, W. L. (2021). Flood pre-
diction and analysis on the relevance of features using
explainable artificial intelligence. In 2021 2nd Arti-
ficial Intelligence and Complex Systems Conference,
pages 1–6.
Rosier, S. H. R., Bull, C. Y. S., Woo, W. L., and Gudmunds-
son, G. H. (2023). Predicting ocean-induced ice-
shelf melt rates using deep learning. The Cryosphere,
17(2):499–518.
Sahana, M. and Patel, P. P. (2019). A comparison of fre-
quency ratio and fuzzy logic models for flood suscep-
tibility assessment of the lower kosi river basin in in-
dia. Environmental Earth Sciences, 78:1–27.
Sanderson, J., Mao, H., Abdullah, M. A. M., Al-Nima, R.
R. O., and Woo, W. L. (2023a). Optimal fusion of mul-
tispectral optical and sar images for flood inundation
mapping through explainable deep learning. Informa-
tion, 14(12).
Sanderson, J., Tengtrairat, N., Woo, W. L., Mao, H., and
Al-Nima, R. R. (2023b). Xfimnet: an explainable
deep learning architecture for versatile flood inunda-
tion mapping with synthetic aperture radar and multi-
spectral optical images. International Journal of Re-
mote Sensing, 44(24):7755–7789.
Sandler, M., Howard, A., Zhu, M., Zhmoginov, A., and
Chen, L.-C. (2019). Mobilenetv2: Inverted residuals
and linear bottlenecks.
Schreider, S. Y., Smith, D., and Jakeman, A. (2000). Cli-
mate change impacts on urban flooding. Climatic
Change, 47:91–115.
Selvaraju, R. R., Cogswell, M., Das, A., Vedantam, R.,
Parikh, D., and Batra, D. (2017). Grad-cam: Visual
explanations from deep networks via gradient-based
localization. In Proceedings of the IEEE international
conference on computer vision, pages 618–626.
Tavus, B., Can, R., and Kocaman, S. (2022). A cnn-based
flood mapping approach using sentinel-1 data. ISPRS
Annals of the Photogrammetry, Remote Sensing and
Spatial Information Sciences, 3:549–556.
Wang, H., Wang, Z., Du, M., Yang, F., Zhang, Z., Ding, S.,
Mardziel, P., and Hu, X. (2020). Score-cam: Score-
weighted visual explanations for convolutional neu-
ral networks. In Proceedings of the IEEE/CVF con-
ference on computer vision and pattern recognition
workshops, pages 24–25.
Yuan, K., Zhuang, X., Schaefer, G., Feng, J., Guan, L., and
Fang, H. (2021). Deep-learning-based multispectral
satellite image segmentation for water body detection.
IEEE Journal of Selected Topics in Applied Earth Ob-
servations and Remote Sensing, 14:7422–7434.
Zhou, B., Khosla, A., Lapedriza, A., Oliva, A., and Tor-
ralba, A. (2016). Learning deep features for discrim-
inative localization. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition,
pages 2921–2929.
Zhou, Z., Rahman Siddiquee, M. M., Tajbakhsh, N., and
Liang, J. (2018). Unet++: A nested u-net architec-
ture for medical image segmentation. In Deep Learn-
ing in Medical Image Analysis and Multimodal Learn-
ing for Clinical Decision Support: 4th International
Workshop, DLMIA 2018, and 8th International Work-
shop, ML-CDS 2018, Held in Conjunction with MIC-
CAI 2018, Granada, Spain, September 20, 2018, Pro-
ceedings 4, pages 3–11. Springer.
Explainable Deep Semantic Segmentation for Flood Inundation Mapping with Class Activation Mapping Techniques
1035
