AbSynth: Using Abstract Image Synthesis for Synthetic Training
Dominik Penk
1,2
, Maik Horn
2
, Christoph Strohmeyer
2
, Bernhard Egger
1
, Marc Stamminger
1
and Frank Bauer
1
1
Chair of Visual Computing, Friedrich-Alexander-Universit
¨
at Erlangen-N
¨
urnberg, Cauerstraße 11, Erlangen, Germany
2
Schaeffler Technologies AG & Co. KG, Industriestraße 1-3, Herzogenaurach, Germany
fl
Keywords:
Synthetic Training Data, Domain Gap, Deep Learning, Computer Vision.
Abstract:
We present a novel pipeline for training neural networks to tackle geometry-induced vision tasks, relying solely
on synthetic training images generated from (geometric) CAD models of the objects under consideration.
Instead of aiming for photorealistic renderings, our approach maps both synthetic and real-world data onto a
common abstract image space reducing the domain gap. We demonstrate that this projection can be decoupled
from the downstream task, making our method an easy drop-in solution for a variety of applications. In this
paper, we use line images as our chosen abstract image representation due to their ability to capture geometric
properties effectively. We introduce an efficient training data synthesis method, that generates images tailored
for transformation into a line representation. Additionally, we explore how the use of sparse line images opens
up new possibilities for augmenting the dataset, enhancing the overall robustness of the downstream models.
Finally, we provide an evaluation of our pipeline and augmentation techniques across a range of vision tasks
and state-of-the-art models, showcasing their effectiveness and potential for practical applications.
1 INTRODUCTION
In modern-day industrial computer vision applica-
tions, deep learning, specifically convolutional neu-
ral networks (CNNs) (Ciresan et al., 2011), play an
important role. Usually, they are trained in a super-
vised fashion, leveraging annotated datasets of im-
age or video data. These methods routinely outper-
form humans or hand-crafted approaches on industry-
relevant tasks like object classification, detection, or
anomaly detection. State-of-the-art models are typi-
cally trained on large-scale public datasets, e.g., Ima-
geNet (Isola et al., 2017) or CoCo (Lin et al., 2014).
However, these models must be finetuned on a use-
case-specific dataset to be used in production. Unfor-
tunately, such datasets are often not publicly available
and must be created manually, a time-consuming and
costly process prone to errors.
In this paper, we propose a novel pipeline for
training or fine-tune neural networks without reliance
on real-world data. Our approach requires only a
CAD model of the objects of interest and does not rely
on realistic rendering like other concurrent work. Fur-
thermore, our method does not require any additional
information about surface color or reflectance. This
makes our pipeline well-suited for industry-relevant
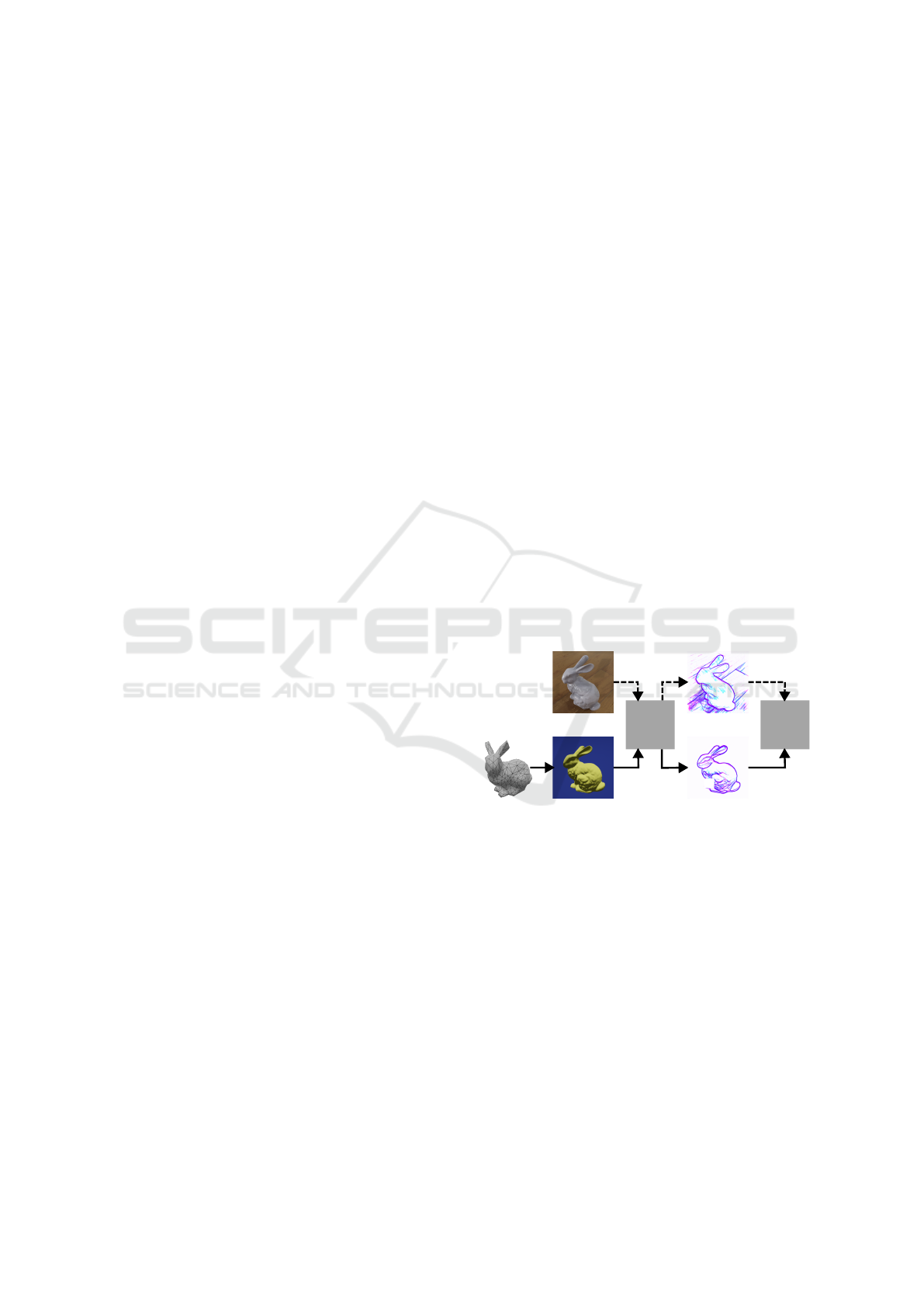
F G
I
synth
I
real
I
synth
abs
I
real
abs
CAD
Figure 1: The proposed pipeline projects real and synthetic
training images to an abstract representation I
abs
using a
neural network F, which we then pass on to the downstream
task G.
applications, where the shape of the object is the main
contributor to derive a solution and CAD models are
usually readily available.
The proposed, task-agnostic, Abstract Image
Synthesis (AbSynth) pipeline is depicted in Fig. 1.
The core idea of this pipeline is to transform both
real-world and synthetic images into a shared abstract
representation I
abs
using a common transformation F.
We will show that F can be fixed for various geomet-
rically based tasks. Consequently, we can then train a
network, called G in Fig. 1, in a supervised fashion.
At the same time, we will show that the reduced de-
gree of detail leads to straightforward data synthesis
718
Penk, D., Horn, M., Strohmeyer, C., Egger, B., Stamminger, M. and Bauer, F.
AbSynth: Using Abstract Image Synthesis for Synthetic Training.
DOI: 10.5220/0012431400003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 2: VISAPP, pages
718-729
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

so that no real data or manual labeling is required for
training.
2 RELATED WORK
Creating photo-realistic color images is difficult and
time-consuming since many user-defined parameters
are required. This includes scene parameters, e.g., re-
alistic lighting conditions and camera properties like
sensor noise and distortion. All these have a subtle
effect, but a network trained on real data might learn
some distinguishing features from them. Similarly, a
network trained on synthetic RGB images might ex-
tract some features from rendering artifacts, e.g., sam-
pling noise on a specific surface material description.
Due to this many minute details, the domain gap be-
tween real and simulated color images is commonly
large.
Narrowing or bridging this gap is an active re-
search topic. Tobin et al. were the first to introduce
the idea of domain randomization for synthetic RGB
data (Tobin et al., 2017). Their work primarily fo-
cuses on removing the reliance on accurate surface
parameters. The core idea is to force the downstream
network to be robust against domain shift by present-
ing many parameter variations to the network dur-
ing training. With this approach, the real-world im-
ages appear to be merely a different variation. Con-
cretely, they demonstrate that they can train a sim-
ple object localizer to identify objects with varying
color textures using exclusively synthetic data. Fol-
lowup work extended this simple idea to other scene
parameters, e.g., by adding distractor objects (Trem-
blay et al., 2018) or random backgrounds (Dosovit-
skiy et al., 2015).
A different approach called sim-to-real tries to ex-
plicitly learn a transformation from the distribution
of synthetic to real-world images. This mapping is
a general Image-to-Image translation usually realized
using a Generative Adverserial Network (GAN) ar-
chitecture (Goodfellow et al., 2020; Karras et al.,
2020). Numerous GAN variations were introduced
in recent years, which primarily differ in the data re-
quired to train them. For instance, pix2pix, intro-
duced by (Isola et al., 2017), uses semantic labels,
which are passed to the discriminator and generator
networks. The authors show their architecture out-
performs color-based GAN architectures. Other ap-
proaches rely only on color data from real-world im-
ages without semantic labels for domain supervision.
One such approach is the Cycle-GAN architecture in-
troduced by (Zhu et al., 2017). They also learn the
inverse mapping, real-world to synthetic images, and
enforce a cycle, from one domain to the other and
back, to produce an image similar to the original in-
put.
In recent publications, diffusion models are
used to perform Image-to-Image translation (Croitoru
et al., 2023).
2.1 Line Drawings
Instead of creating more realistic color images,
(Harary et al., 2022) proposed that edge images can
be used as the basis for domain generalization. They
use edge images to guide a learned bridge domain that
encapsulates all necessary information for a specified
downstream task. They use the bride domain images
to force the network, which solves the downstream
task, to generalize over multiple input domains, rang-
ing from color images to paintings.
Other studies (Goodman, 2022; Kennedy and
Ross, 1975; Hertzmann, 2021a; Hertzmann, 2021b)
have shown that edge images convey a strong sense
of geometry and can even be used to predict depth
images.
Based on these observations, we have chosen line
images as the abstract intermediate representation for
our AbSynth pipeline. This implies that the function
F needs to take an RGB image and output a line draw-
ing of the same image. Usually, an implementation of
F only produces a single-channel image. However,
as depicted in Fig. 2e, we can combine multiple in-
stances of F to form the final abstract representation
I
abs
. We will show that this combined abstract repre-
sentation often improves performance.
Edge Detection
Edge detection is a natural fit for F, and since
it is a fundamental technique in image processing,
many algorithms were developed for this task. One
of the most widely used edge detection methods is
the Canny edge detection algorithm (Canny, 1986),
which involves applying a series of image filters to
smooth the image and highlight areas containing large
intensity gradients. Unfortunately, these methods ex-
pose a couple of user-chosen parameters, e.g., thresh-
olds of intensity differences, which must be chosen
carefully to achieve a good edge image. Simple im-
age filters such as Sobel, Prewitt, and Roberts oper-
ators can also be used for edge detection. However,
these filters often produce noisy or incomplete edges,
More recent, data-driven approaches like Holistically-
Nested Edge Detection (HED), presented by (Xie and
Tu, 2015), can be pre-trained and used without the
need to set parameters. For completeness, we clas-
sify the intermediate bride domain BrAD introduced
AbSynth: Using Abstract Image Synthesis for Synthetic Training
719

(a) Color Input. (b) Anime. (c) BrAD. (d) Open Sketch.
(e) Combined.
Figure 2: Different line styles for the same input. Subfibure (e) displays the three styles combined as a single RGB image.
by (Harary et al., 2022) as a version of edge detection
since it uses the same model as HED. The authors
also ensured that the resulting bride domain images
remained visually similar to the output of the original
HED network.
Style Transfer
In the most general form, F is a generic image-to-
image transformation. Many data-driven approaches
have been developed to facilitate such transformations
in recent years. For our approach, we are particu-
larly interested in the field of style transfer. Here,
the goal is to input an arbitrary color image and re-
turn a new image with the same content in another
style. Applications in this domain range from sim-
ple image colorization to transforming a photograph
into a cubistic drawing. We model F under the style
transform paradigm by training a network to produce
a given style of line drawings. Some example styles
are shown in Fig. 2 and range from artistic anime to
technical drawings.
The paper ”Informative Drawings: Learning to
generate line drawings that convey geometry and se-
mantics” by (Chan et al., 2022) presents a method
tailored to precisely this problem and is focused on
generating line drawings that accurately convey both
the geometry and the semantics of the original color
image. They developed an updated training pipeline
incorporating geometric and semantic consistency be-
tween the input color image and the resulting line
drawing.
They used an explicit semantic loss function be-
tween the input and output images to achieve this.
This loss uses the network called CLIP (Contrastive
Language-Image Pre-training) (Radford et al., 2021),
which computes an embedding vector of an image.
The CLIP model was trained on pairs of images and
their description such that the embedding captures the
most important semantic information. The semantic
loss then compares the embeddings of the original
color image and the resulting line drawing, forcing
the network to produce images with similar semantic
information.
However, (Chan et al., 2022) points out that the se-
mantics alone does not ensure a geometrically consis-
tent transformation. For instance, both images could
contain a plane, but in one image, it is flying in the
air, while it is parked on the ground in the other one.
They, therefore, introduce a geometric loss that uses a
pre-trained monocular depth estimator network. Dur-
ing training, they assume known depth maps for the
color images and use the depth estimator network to
compute depths for the generated line drawings. The
loss is simply the average per-pixel difference be-
tween those two depth maps. Interestingly, the sin-
gle image depth estimator uses VGG19 features and
is pre-trained on color images. This confirms the ob-
servation made by (Hertzmann, 2021b) that line draw-
ings can adequately convey geometry.
3 METHOD
3.1 Synthetic Image Generation
We now present our synthetic data generation process
for the AbSynth pipeline. Our goal is to provide a
simple rendering setup that only requires the geomet-
ric data of target objects and produces training images
containing enough visual information to be converted
to a realistic edge image. The method is inspired by
early works of (DeCarlo et al., 2003). They infor-
mally introduce suggestive contours as those regions
on a mesh that are real contours in nearby viewpoints.
They also define them more formally using the con-
tour indicator function on a smooth surface S
n
n
n(p
p
p)
T
v
v
v(p
p
p) (1)
where p
p
p ∈ S is a surface point, n
n
n(p
p
p) is the unit surface
normal, and v
v
v(p
p
p) is the view vector from the camera
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
720

(a) Contour Indicator. (b) Surface Color.
(c) Combined. (d) Instance Mask.
Figure 3: (a)-(C): Shading of synthetic training images combines a contour indicator function and colors based on surface
normals. During data synthesis, we can easily generate per pixel label, e.g. instance masks in (d).
to the surface point. With this, suggestive contours
are the local minima of this indicator function, and
real contours are found at the roots. DeCarlo et al.
show that an approximation of these minima can be
found by rendering the object and shading the pix-
els using the dot product from Eq. (1). The resulting
images look like Fig. 3a, and intensity ridges are the
suggestive contours.
Since the suggestive contour map, defined by
Eq. (1) only yields the surface intensity, we can use
the hue to provide more information. For this, we
adopted an idea from the field of surface normal es-
timation, where different colored lights are placed
along the cardinal direction of a predefined coordinate
system. If the object is diffuse and white, a surface di-
rectly facing one of these directions will reflect only
that light, whereas partially rotated ones will take on a
mixed color. We approximate this effect by using the
surface normal, mapped from [−1, 1]
3
to [0, 1]
3
, as the
color of the surface, this produces the colors depicted
in Fig. 3b. If multiple objects are in the scene, we also
apply a random hue shift per object to ensure good vi-
sual separation.
3.2 Abstract Augmentation
A common method to improve generalization and
prevent shortcut learning is dataset augmentation. Of
course, typical image-level augmentations can be ap-
plied together with the AbSynth pipeline. Most pixel-
wise augmentations like randomized hue shifts or
Gaussian blur have a negligible effect since these
changes bearly affect F. On the other hand, content-
altering methods, e.g., random flipping or image crop-
ping, do not lose any potency in our setup.
Since I
abs
is still an image, we can use augmenta-
tion during training directly on the abstract represen-
tation. As we will see in this subsection, the sparse
nature of the line images enables augmentations that
are impossible or hard to pull off in the original RGB
space.
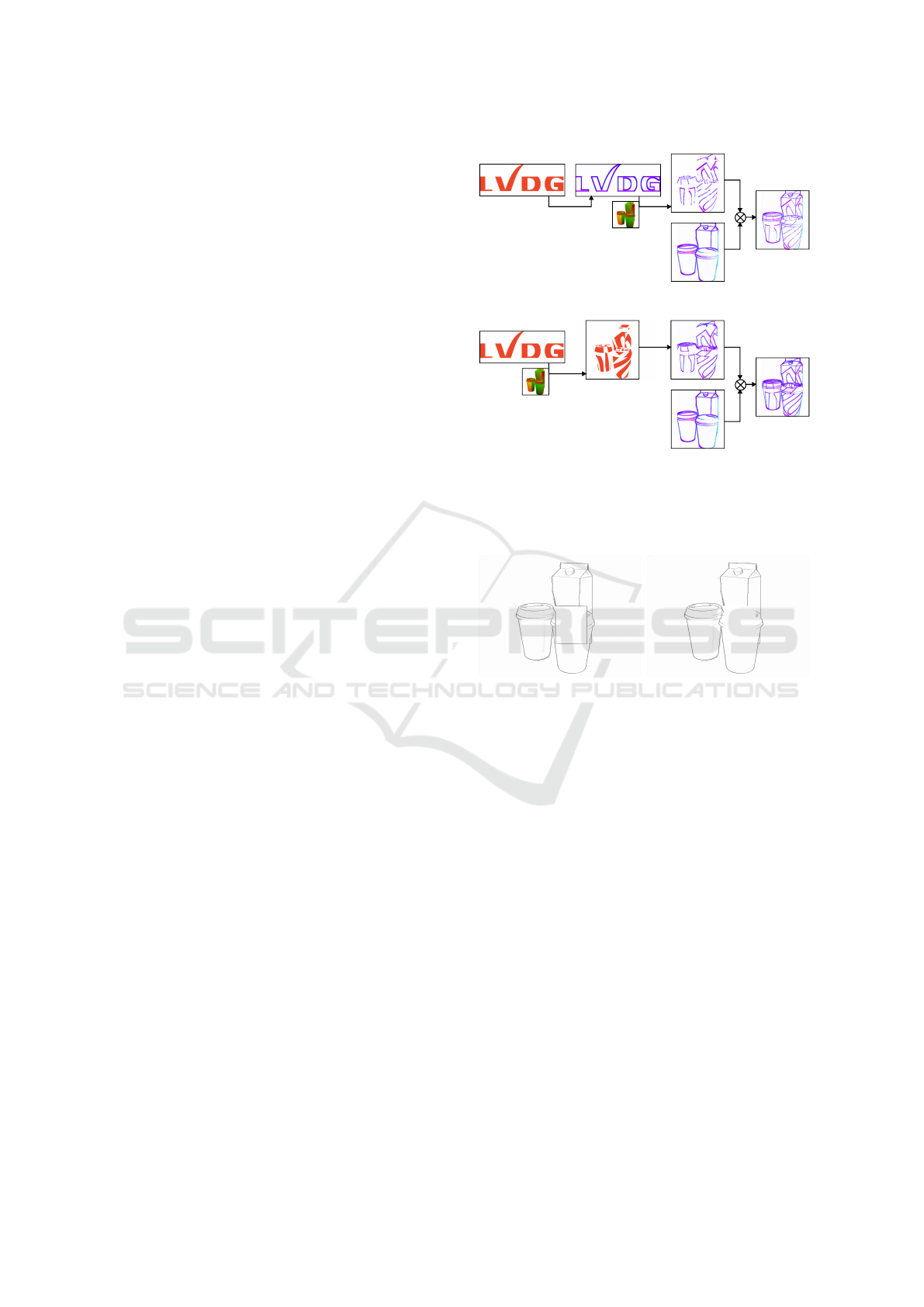
(a) Naive Fusion. (b) Deferred Fusion.
Figure 4: Sample of an abstract training image. The line
fusion adds the background. In the deferred approach, lines
on the foreground objects follow the surface curvature.
3.2.1 Line Fusion
Remixing multiple images from a dataset to gener-
ate new images and add variety is a potent method.
A famous example of such a technique is the mo-
saic data augmentation introduced by (Bochkovskiy
et al., 2020), which greatly contributed to improved
object detection performance in YOLOv4. However,
due to the high complexity of natural images, these
approaches are usually rather limited: We can either
mix two images using alpha blending or stitch them
to form a bigger image.
In contrast, using the sparse nature of our abstract
representation enables us to combine the features of
two images more easily. Say we want to enrich a
training image with distracting features from a differ-
ent (natural) image J. We first compute J
abs
using the
image-to-image transformation F
abs
. Then we create
a fused image
ˆ
I
abs
by taking the pixel-wise minimum:
ˆ
I
abs
= min(I
abs
, J
abs
) (2)
Since this method essentially merges the lines of two
abstract images, we call this augmentation Line Fu-
sion (LF). In Section 4.1, we show that this simple
approach can improve generalization since the addi-
tional, randomized complexity forces the downstream
network G to distill more robust features.
However, the resulting fused images are usually
not plausible since the lines of J
abs
are painted over
the original training image without any geometric rea-
soning. If we control the data synthesis process, or if
AbSynth: Using Abstract Image Synthesis for Synthetic Training
721
the dataset provides more information besides color,
we can turn this LF augmentation into a potent con-
tent augmentation technique. Usually, any dataset
contains images with objects of interest in the fore-
ground. If the dataset provides a per-pixel instance
mask for the target objects, we can ensure that they
stay in front of the distractor image J by only fusing
pixels where the instance mask M indicates the back-
ground:
ˆ
I
abs
(q
q
q) =
(
min(I
abs
(q
q
q), J
abs
(q
q
q)) if M(q
q
q) = 0
I
abs
(q
q
q) else
(3)
Here, we assume that a value of M is the instance id, 0
being the background. This method allows us to ran-
domize the background, and to place the target objects
in varying environments.
Our data generation outlined in Section 3.1 does
not use surface textures, leading to featureless sur-
faces. Real-world objects, on the other hand, often
contain non-geometric texture details which impede
network performance during inference. We can use
LF to counteract this by adding random surface tex-
tures to foreground objects using a second distractor
image T . We produce the randomized surface texture
by fusing T
abs
with the foreground regions of I
abs
. We
use a random pixel offset δ
δ
δ
k
per object instance to ac-
cess T
abs
, which makes sure that the distractor image
is broken up, even if many target objects overlap:
ˆ
I
abs
(q
q
q) =
(
min(I
abs
(q
q
q), J
abs
(q
q
q)) if M(q
q
q) = 0
min(I
abs
(q
q
q), T
abs
(q
q
q + δ
δ
δ
k
)) M(q
q
q) = k
(4)
A result of this naive fore- and background fusion ap-
proach is depicted in Fig. 4a.
Upon closer inspection of this image, we see that
the overall curvature of the coffee cups is hard to un-
derstand due to the flat lines pasted over this region.
This is contrary to our assumption that the down-
stream task should be mainly focused on geometric
features. To ensure the fused real image follows the
actual surface geometry, we borrow an idea of de-
ferred shading and output a uv-mask Φ for the ren-
dered training image. We then use Φ to warp and map
T
abs
along the surface of the target objects:
min(I
abs
(q
q
q), T
abs
(∆
k
Φ(q
q
q)) for M(q
q
q) = k (5)
Here, we also apply a per-instance random coordinate
transformation ∆
k
to the uv coordinates. In Fig. 5a,
we show an example where a logo is warped onto the
cups using this approach. The mapped lines are thin-
ner and less visible than the naive warping method.
This aliasing effect is caused by the mapping of the
(potentially) large and very sparse line image T
abs
onto a comparatively small region. We can address
Φ
F
uvs
(a) Late warping.
Φ
uvs
F
(b) Early warping.
Figure 5: Difference between warping the abstract lines (a)
versus warping the distractor image (b). Warping lines pro-
duces to magnification and minification artifacts. In con-
trast, early warping produces clean synthetic images.
Figure 6: Abstract representation with random erase aug-
mentation. On the left, the augmentation was performed on
the color image. On the right on in the abstract domain.
this problem by applying the image warping to T be-
fore we apply F
abs
and then using Eq. (4) with a con-
stant δ
k
= 0. Applying this early-warping method
to the logo of the example, we obtain the new fore-
ground distractor depicted on the lower left in Fig. 5a.
The resulting foreground fusion on the right is much
cleaner, with even line thickness and brightness.
3.2.2 Random Erase
Random erasing, introduced by (Zheng et al., 2021),
is a popular augmentation method for object detec-
tion and instance segmentation to simulate object oc-
clusion. This augmentation selects a random subre-
gion of the input image and fills it with a constant
value. We tried to apply this augmentation to the
intermediate representation directly onto the abstract
image I
abs
. As shown in Fig. 6, the results differ con-
siderably depending on the time of content removal.
Applying the erase augmentation to the color image
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
722
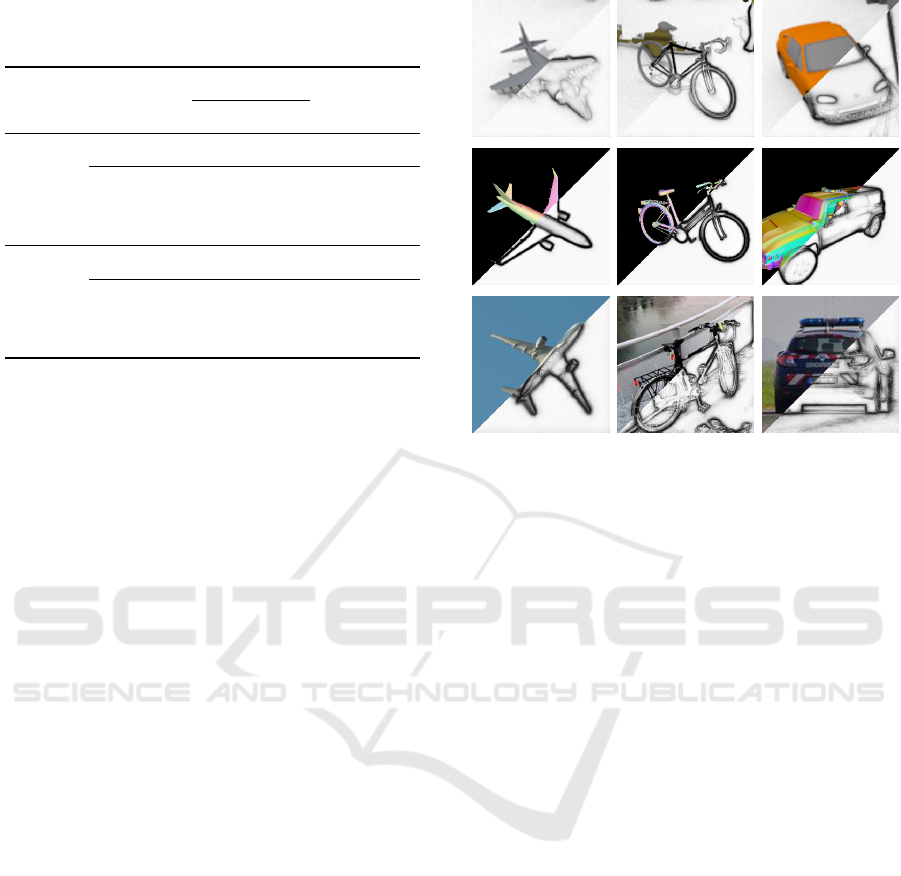
Table 1: Comparison of classification for a ResNet34
trained on synthetic datasets and evaluated on a subset of
CoCo without and with the AbSynth pipeline.
Dataset Style
Augmentation
Accuracy
LF RE
VisDA
2017
Baseline 0.363
Ours
(BrAD)
✗ ✗ 0.429
✓ ✗ 0.566
✓ ✓ 0.547
AbsDA
Baseline 0.288
Ours
(BrAD)
✗ ✗ 0.430
✓ ✗ 0.592
✓ ✓ 0.488
yields a visible rectangle (that occludes the object).
Erasing regions in the abstract image mimics another
observation: Real-world images may contain areas
where object boundaries are not visible due to low
contrast. Specular reflections, shadows, or similar
surface colors may cause this. Since all the presented
versions of F rely — at least partially — on intensity
gradients, no line will be drawn in these regions. In
contrast, our data generation usually has high contrast
leading to images with clearly defined object bound-
aries. We assumed, that random line erasing on the
abstract image might improve the downstream net-
work for some datasets. As we will see, this was not
the case for our experiments.
4 EXPERIMENT RESULTS
4.1 Classification
In this section, we demonstrate synthetic training for
image classification. To this end, we use the VisDa
2017 (Peng et al., 2018) dataset, which consists of
rendered training images — with model taken among
others from ShapeNet (Chang et al., 2015) — and test
data selected from CoCo (Lin et al., 2014). Since in-
stance and uv-masks are not provided with the ViDA
dataset, we can only apply the naive version of LF.
To assess the impact of deferred LF, we created
a separate dataset called AbsDA. We only took ob-
jects from ShapeNet Core, which drops the number
of classes in the dataset to 8. Some samples from the
two train datasets are depicted in Fig. 7, and the last
row shows some examples from the test dataset.
We evaluate the classification accuracy of a
ResNet34 model trained on the VisDA 2017 and Ab-
sDa datasets. The results are summarized in Table 1.
Figure 7: Sample images from different target domains,
starting from the top row: VisDa, AbsDa, and CoCo. Each
image displays the original color image and its abstract rep-
resentation (BrAD).
The Baseline style is used as a reference point, where
no image abstraction or augmentation is applied, and
its accuracy acts as a lower bound for the expected
performance. For these experiments, we opted to
use the BrAD intermediate representation as it was
originally designed for cross-domain classification by
(Harary et al., 2022). As shown in Table 1, the ab-
straction greatly improves the classification accuracy,
and even the naive LF forces the network to general-
ize better to real-world data. In contrast, random line
erasing (RE) decreases the classification accuracy.
The results of this experiment highlight the im-
portance of using LF as an augmentation method to
enhance the generalization ability of models trained
using our pipeline. This augmentation introduces ad-
ditional complexity to the images by adding a back-
ground scene. Furthermore, the addition of lines in
the region of the foreground objects essentially ran-
domizes their surface texture, which means the model
must learn to recognize objects by consistent geomet-
ric features and outlines instead of specific textural
details.
4.2 Object Detection
Object detection and localization are essential in vari-
ous visual inspection applications, including quality
control and robotic manipulation. To evaluate the
performance of our pipeline on a state-of-the-art ob-
ject detection model, we utilized three publicly avail-
AbSynth: Using Abstract Image Synthesis for Synthetic Training
723

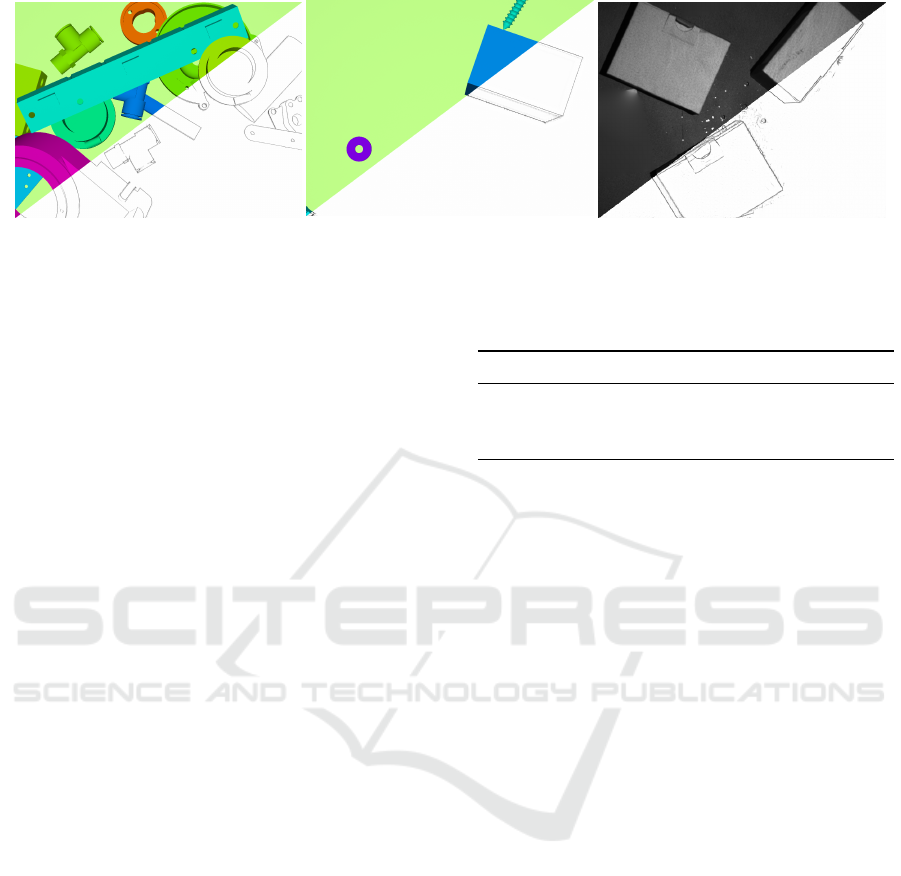
(a) LM-O. (b) ITODD. (c) T-LESS.
Figure 8: Training and evaluation samples from the BOP challenge datasets. Images display the original color input and the
corresponding abstract representation.
able datasets from the BOP challenge, namely, LM-O
(Brachmann, 2020), ITODD (Drost et al., 2017) and
T-LESS (Hodan et al., 2017). As with all datasets
in the BOP challenge, they contain synthetic training
data generated using BlenderProc (Denninger et al.,
2019). BlenderProc uses Blender (Foundation, 2022)
and its built-in ray tracing engine to generate physi-
cally based renderings of 3D models, which are also
included in the datasets. While the training data is
synthetic, the test data for each dataset is composed
of real-world images, making the evaluation more re-
alistic and relevant to real-world applications.
The three chosen datasets all contain objects with
little to no distinguishing textures which implies ob-
ject detection and classification is primarily geome-
try based. Besides this similarity, the three datasets
present different challenges:
The LM-O dataset features 10 household objects
with discriminative shapes, sizes, and colors. Despite
the low number of classes, the dataset is challenging
for object localization due to the high levels of occlu-
sion and cluttered backgrounds. The object models in
the dataset were reconstructed using a depth camera,
leading to relatively noisy and inaccurate meshes.
In contrast, the ITODD dataset comprises 28 in-
dustrial objects with handcrafted CAD models, result-
ing in cleaner synthetic training data. The test dataset
was captured in a realistic, productive setting using
different sensors, including a grayscale camera. The
test images were captured against a uniform back-
ground with varying levels of inter-object occlusion.
For example, some scenes contain a pile of washers,
as shown in Fig. 8b while others contain fewer, clearly
separated objects.
Finally, the T-LESS dataset combines the features
of the previous two datasets. It includes 30 texture-
less, industry-relevant objects with clean CAD mod-
els. The 20 test scenes vary in complexity, with some
scenes containing clutter objects. The objects in the
dataset exhibit symmetries and mutual similarities in
shape and size, and some are composed of other ob-
jects, making the dataset more challenging. A sample
image from the T-LESS dataset is shown in Fig. 8c.
Realistic Training Data
In this experiment, we aim to evaluate the effect
of the proposed abstraction on the training process.
To achieve this, we train a Faster-RCNN (Girshick,
2015) on the synthetic (semi-)realistic training data
provided by the BOP challenge datasets. We use var-
ious intermediate styles, ranging from classic canny-
edge images to combinations of line drawing styles.
Besides different styles, we also test the impact of the
augmentation techniques, presented in Section 3.2, on
the final detection quality. Each network was trained
for 30 epochs using SGD with a learning rate of 0.02,
which we decreased after epochs 16 and 22 by a fac-
tor of 10. The Faster-RCNN network uses ResNet50,
pre-trained on ImageNet using o ur pipeline, for fea-
ture extraction. In Table 2, we report the mean Aver-
age Precision (mAP) on the test results for different
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
724
Table 2: Detection Accuracy on BOP challenge datasets us-
ing the provided synthetic training data. Baseline indicates
training without the AbSynth pipeline.
Dataset Style
Augmentation
mAP
LF RE
LM-O
Baseline 0.516
Canny ✗ ✗ 0.423
BrAD ✗ ✗ 0.490
Anime
✗ ✗ 0.480
✓ ✗ 0.495
ITODD
Baseline 0.618
Canny
✗ ✗ 0.756
✓ ✗ 0.783
BrAD ✗ ✗ 0.617
Anime
✗ ✗ 0.813
✓ ✗ 0.795
Anime + OS
✗ ✗ 0.849
✗ ✓ 0.812
✓ ✗ 0.819
T-LESS
Baseline 0.195
Canny
✗ ✗ 0.677
✓ ✗ 0.660
BrAD ✗ ✗ 0.290
Anime ✗ ✗ 0.695
Anime + OS
✗ ✗ 0.685
✓ ✗ 0.695
✓ ✓ 0.658
configurations of the training pipeline.
To provide a baseline for comparison, we also
train the network using only the original training
dataset without using our pipeline. The results in Ta-
ble 2 show that the proposed AbSynth pipeline signif-
icantly improves detection accuracy compared to the
baseline approach. Specifically, using the AbSynth
pipeline with the Anime and Open Sketch styles and
LF achieves the highest mAP on all three datasets.
Interestingly, the BrAD style underperforms com-
pared to any intermediate representation based on the
informative drawing architecture. This contrasts with
the previous chapter, where the BrAD style was the
best choice for image classification.
To understand this difference, we considered the
training procedures for the two styles. The BrAD net-
work was trained by (Harary et al., 2022) to contain
cues for cross-domain image classification. While
this task may partially use shape-based information,
Table 3: mAP and per class precision for a subset of objects
in the ITODD dataset. Line fusion augmentation often sig-
nificantly improves network predictions on a per-class level.
LF mAP Box Cap Fuse Wash
✗ 0.742 0.789 0.900 0.845 0.850
✓ 0.827 0.950 0.904 0.911 0.764
the authors did not explicitly force the network to in-
clude geometric information in its representation.
On the other hand, as we discussed in Section 2.1,
the line drawing style transform explicitly forces the
resulting images to contain geometric details. Since
the datasets used in our evaluation contain mostly tex-
tureless objects, their geometry becomes the primary
feature, and the intermediate style that best conveys it
performs the best.
The impact of the RE augmentation on the final
detection accuracy was found to be minor and some-
times negative according to the results in Table 2.
This technique was designed to increase the network’s
robustness against partial occlusion, a common chal-
lenge in object detection. However, since the training
data already includes many examples of inter-object
occlusion, the network is trained to deal with par-
tial views of the target objects. On the other hand,
the rectangular crop regions used in the augmentation
are not commonly found in real-world images, which
may lead to a slight increase in the gap between the
training and inference domains.
False Color Training Data
We have already shown that our pipeline can improve
detection quality for (semi-)realistic synthetic train-
ing data. However, to generate such high-quality ren-
derings, the user needs to provide object textures and
other surface parameters, e.g., how specular the object
is. In Section 3.1, we presented a rendering technique
that takes just the CAD model and outputs false color
images that can be converted to plausible intermediate
line representations. To avoid the need to create com-
plex background scenes, we opted to create a custom
dataset for ITODD. We created the training data using
Blender, with objects randomly scattered on a plane
using the built-in rigid-body physics engine. Some
samples from the sample data are depicted in Fig. 9.
We again trained a Faster-RCNN network with
hyperparameters similar to the previous section. We
used Anime line drawings as the intermediate repre-
sentation since a single-style intermediate representa-
tion is a reasonable tradeoff between expected qual-
ity and inference speed. In Table 3, we present the
detection precision on the test dataset. The mAP is
competitive with the network trained using realistic
AbSynth: Using Abstract Image Synthesis for Synthetic Training
725
(a) Multi object train image.
(b) Box train image.
(c) Box test image.
Figure 9: Synthetic and real-world data for the box class. The images show the original color image and their anime line
drawings.
renderings. While the line fusion augmentation was
not beneficial on the original ITODD training data, it
was for our custom dataset.
We analyze the per-class detection accuracy in
more detail to investigate how LF augmentation in-
fluences the final network. To this end, we present a
selection of per-class detection accuracies in Table 3.
In most cases, the augmentation had a minor effect
on the results, with only a few classes showing a sig-
nificant improvement. One example is the packaging
box which uses a simple cuboid as its CAD model.
As depicted in Fig. 9c, the real-world counterpart has
more details, such as a flap to open it. Without aug-
mentation, the network often misclassifies such ob-
jects because they lack these details in the training
data. However, with LF-augmentation, the network
is trained to be robust against varying surface details
inside the object. Therefore, the additional details are
treated as random surface details and ignored by the
trained network, resulting in a more accurate detec-
tion.
4.3 Bin Picking
In this section, we apply the proposed AbSynth
pipeline to train a model to detect the electric motor
shown in Fig. 10a. As depicted in Fig. 10b, we simu-
late a bin-picking scenario placing the motor in a box
alongside other objects.
Similar to the previous section, we used Blender
(Foundation, 2022) to generate the synthetic train-
ing data. The dataset comprises 600 scenes rendered
using 20 random camera positions, yielding 12000
training images. We created a box with random di-
mensions for each scene and used the built-in physics
engine to let objects fall into it. The entire scene
generation and rendering procedure was automated,
so we only needed to convert the CAD models from
the step file format to one that can be imported into
Blender. Since we used the false-color rendering ap-
Table 4: Evaluation metrics for custom bin-picking dataset.
mAP
0.5
mAP
0.75
mAP
0.5:0.95
mAR
Full 0.906 0.697 0.639 0.710
Boxes 0.910 0.677 0.634 0.701
Other 0.903 0.732 0.650 0.720
proach outlined in Section 3.1 we do not need to cre-
ate any randomized lighting setup or provide any sur-
face properties.
We took 64 images of similar scenes containing
motors in boxes for evaluation. Since we want to eval-
uate whether the network can generalize, we also cap-
tured 24 images of configurations not present in the
synthetic data. An example is depicted in Fig. 10c,
where the motors are placed in a tray instead of a box.
We trained a Faster-RCNN network for 30 epochs,
utilizing a dataset comprising 25,000 synthetic train-
ing images. The training was performed using SGD
with an initial learning rate of 0.02, which we reduced
by a factor of 0.1 after epochs 16 and 22. We chose the
anime style as the intermediate representation since a
one-channel representation has proven to be a good
trade-off between inference speed and model accu-
racy in previous experiments. The detection results on
the evaluation test set are compiled in Table 4. Inter-
estingly, the detection accuracy between bin-picking
and other cluttered scenes is very similar for a low
IoU threshold. This indicates that the training syn-
thetic training data is diverse enough to generalize
the ROI classification to similar but unseen scenar-
ios. The precision of box samples is lower compared
to the rest of the validation data as the threshold in-
creases. We attributed this to a higher probability of
occlusion in those scenes, which makes it more chal-
lenging to locate object boundaries accurately.
One of the main advantages of our approach is that
it does not require manual labeling, which is be time-
consuming and costly. In traditional approaches us-
ing real-world images, image acquisition and labeling
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
726

(a) Target Objects. (b) Training Sample. (c) Validation Sample.
Figure 10: Data used to train and evaluate the object detection use case.
Table 5: Comparison of labeling and data acquisition
speeds.
Box time Acquisition time Total
Synthetic 0.3s 9.0s 9.0s
Manual 8.4s 24.7s 57.2s
(a) Fully visible. (b) Occluded.
Figure 11: Two samples from our labeling study showing
the annotations of all participants.
are separate steps that can add to the overall time and
effort required. However, with our data-generation
pipeline, labels (e.g., object bounding boxes) are gen-
erated simultaneously with the synthetic images. To
quantify the reduction in manual labor provided by
our approach, we measured the average time required
to annotate a bounding box (box time) for both the
training and evaluation datasets. We estimate the im-
age acquisition time for the synthetic dataset by di-
viding the duration of synthetic data generation by the
number of images in the training set. The image ac-
quisition time is estimated using the duration of gen-
erating the synthetic dataset divided by the number
of images in the training set. Note that this includes
the time used to simulate the objects falling into the
box. For the real-world dataset, we measure the time
to capture the images and divide it by the dataset size.
A single user annotated the test dataset to ensure
consistent label quality. However, the labeling speed
is influenced by the user’s experience, which intro-
duces a bias in the timing statistics.
We conducted a small user study involving 10 par-
ticipants to address this issue. Each participant was
assigned a set of 10 images randomly selected from
the test dataset and asked to annotate them. By com-
paring the results, we obtain a more comprehensive
understanding of the labeling process and its associ-
ated time requirements. The findings from this study
are presented in Table 5, revealing notable differences
in image acquisition and labeling times between syn-
thetic data generation and real-world scenarios.
Furthermore, we took advantage of this user study
to investigate the impact of occlusion on the consis-
tency of bounding box annotations across different
users. For this purpose, two of the 10 presented im-
ages were identical for all participants. One depicts
strong occlusion, and the other features a clear sep-
aration between instances. As hypothesized, we ob-
served significant variations in annotated bounding
boxes for heavily occluded motors, while instances
with less occlusion generally exhibited more consis-
tent labeling. Figure 11 provides visual examples for
two instances from these images. For fully visible
instances, annotation differences can be primarily at-
tributed to sloppy labeling. However, achieving accu-
rate annotations becomes exceedingly difficult when
faced with occlusion and challenging lighting condi-
tions.
In contrast, the labels of synthetic training data
produced by our approach are inherently pixel-
perfect, irrespective of the scene’s complexity or level
of occlusion.
5 CONCLUSION
This paper we presented a novel approach to synthetic
image training. Instead of creating photo-realistic im-
ages or using neural networks that transform render-
ings into such images, we propose projecting syn-
thetic and real-world data into a shared abstract do-
main. We demonstrated that line drawings are such
AbSynth: Using Abstract Image Synthesis for Synthetic Training
727

a domain, that is well suited for downstream tasks
based on object geometry. Applying our approach
to different tasks, we showed that the image-to-line
transformation can be decoupled from these down-
stream tasks, and we presented various methods to fa-
cilitate the transformation. Our experiments showed
that our method can be a drop-in to improve object de-
tection quality, even using datasets with semi-realistic
synthetic data. The intermediate line representation
also enables novel augmentation methods, further im-
proving network generalization to real-world data. Fi-
nally, we demonstrated how our approach could be
used in a real-world use case by training a network to
identify objects in a bin-picking scenario without any
real training images.
Despite the success of our approach, there are ar-
eas for further exploration and optimization. The pro-
jection of images to their abstract representation is an
additional step that requires computation time, and
optimizing the runtime should be a focus in follow-
up work. One promising idea is to use knowledge
distillation with a student-teacher approach producing
smaller image-to-image networks based on the pre-
sented ones. Additionally, we believe the downstream
networks can be trimmed down since the abstract in-
put data contains condensed, more meaningful data
than pure color images.
ACKNOWLEDGEMENTS
This work has been supported by the Schaeffler
Hub for Advanced Research at Friedrich-Alexander-
Universit
¨
at Erlangen-N
¨
urnberg (SHARE at FAU).
REFERENCES
Bochkovskiy, A., Wang, C.-Y., and Liao, H.-Y. M. (2020).
Yolov4: Optimal speed and accuracy of object detec-
tion. arXiv preprint arXiv:2004.10934.
Brachmann, E. (2020). 6D Object Pose Estimation using
3D Object Coordinates [Data].
Canny, J. (1986). A computational approach to edge de-
tection. IEEE Transactions on pattern analysis and
machine intelligence, pages 679–698.
Chan, C., Durand, F., and Isola, P. (2022). Learning to
generate line drawings that convey geometry and se-
mantics. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
7915–7925.
Chang, A. X., Funkhouser, T., Guibas, L., Hanrahan,
P., Huang, Q., Li, Z., Savarese, S., Savva, M.,
Song, S., Su, H., et al. (2015). Shapenet: An
information-rich 3d model repository. arXiv preprint
arXiv:1512.03012.
Ciresan, D. C., Meier, U., Masci, J., Gambardella, L. M.,
and Schmidhuber, J. (2011). Flexible, high perfor-
mance convolutional neural networks for image clas-
sification. In Twenty-second international joint con-
ference on artificial intelligence. Citeseer.
Croitoru, F.-A., Hondru, V., Ionescu, R. T., and Shah, M.
(2023). Diffusion models in vision: A survey. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence.
DeCarlo, D., Finkelstein, A., Rusinkiewicz, S., and San-
tella, A. (2003). Suggestive contours for conveying
shape. In ACM SIGGRAPH 2003 Papers, pages 848–
855. ACM New York, NY, USA.
Denninger, M., Sundermeyer, M., Winkelbauer, D., Zi-
dan, Y., Olefir, D., Elbadrawy, M., Lodhi, A., and
Katam, H. (2019). Blenderproc. arXiv preprint
arXiv:1911.01911.
Dosovitskiy, A., Fischer, P., Ilg, E., Hausser, P., Hazirbas,
C., Golkov, V., Van Der Smagt, P., Cremers, D., and
Brox, T. (2015). Flownet: Learning optical flow with
convolutional networks. In Proceedings of the IEEE
international conference on computer vision, pages
2758–2766.
Drost, B., Ulrich, M., Bergmann, P., Hartinger, P., and Ste-
ger, C. (2017). Introducing mvtec itodd-a dataset for
3d object recognition in industry. In Proceedings of
the IEEE international conference on computer vision
workshops, pages 2200–2208.
Foundation, B. (2022). Blender.
Girshick, R. (2015). Fast r-cnn. In Proceedings of the IEEE
international conference on computer vision, pages
1440–1448.
Goodfellow, I., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., Courville, A., and Ben-
gio, Y. (2020). Generative adversarial networks. Com-
munications of the ACM, 63(11):139–144.
Goodman, N. (2022). Languages of art. In Lexikon
Schriften
¨
uber Musik, pages 293–376. Springer.
Harary, S., Schwartz, E., Arbelle, A., Staar, P., Abu-
Hussein, S., Amrani, E., Herzig, R., Alfassy, A.,
Giryes, R., Kuehne, H., et al. (2022). Unsupervised
domain generalization by learning a bridge across do-
mains. In Proceedings of the IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
5280–5290.
Hertzmann, A. (2021a). The role of edges in line drawing
perception. Perception, 50(3):266–275.
Hertzmann, A. (2021b). Why do line drawings work? a re-
alism hypothesis. Journal of Vision, 21(9):2029–2029.
Hodan, T., Haluza, P., Obdr
ˇ
z
´
alek,
ˇ
S., Matas, J., Lourakis,
M., and Zabulis, X. (2017). T-less: An rgb-d dataset
for 6d pose estimation of texture-less objects. In 2017
IEEE Winter Conference on Applications of Computer
Vision (WACV), pages 880–888. IEEE.
Isola, P., Zhu, J.-Y., Zhou, T., and Efros, A. A. (2017).
Image-to-image translation with conditional adversar-
ial networks. In Proceedings of the IEEE conference
on computer vision and pattern recognition, pages
1125–1134.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
728

Karras, T., Laine, S., Aittala, M., Hellsten, J., Lehtinen,
J., and Aila, T. (2020). Analyzing and improving
the image quality of stylegan. In Proceedings of the
IEEE/CVF conference on computer vision and pattern
recognition, pages 8110–8119.
Kennedy, J. M. and Ross, A. S. (1975). Outline picture per-
ception by the songe of papua. Perception, 4(4):391–
406.
Lin, T., Maire, M., Belongie, S. J., Bourdev, L. D., Girshick,
R. B., Hays, J., Perona, P., Ramanan, D., Doll’a r, P.,
and Zitnick, C. L. (2014). Microsoft COCO: common
objects in context. CoRR, abs/1405.0312.
Peng, X., Usman, B., Kaushik, N., Wang, D., Hoffman, J.,
and Saenko, K. (2018). Visda: A synthetic-to-real
benchmark for visual domain adaptation. In Proceed-
ings of the IEEE Conference on Computer Vision and
Pattern Recognition Workshops, pages 2021–2026.
Radford, A., Kim, J. W., Hallacy, C., Ramesh, A., Goh, G.,
Agarwal, S., Sastry, G., Askell, A., Mishkin, P., Clark,
J., et al. (2021). Learning transferable visual models
from natural language supervision. In International
conference on machine learning, pages 8748–8763.
PMLR.
Tobin, J., Fong, R., Ray, A., Schneider, J., Zaremba, W., and
Abbeel, P. (2017). Domain randomization for transfer-
ring deep neural networks from simulation to the real
world. In 2017 IEEE/RSJ international conference on
intelligent robots and systems (IROS), pages 23–30.
IEEE.
Tremblay, J., Prakash, A., Acuna, D., Brophy, M., Jam-
pani, V., Anil, C., To, T., Cameracci, E., Boochoon,
S., and Birchfield, S. (2018). Training deep networks
with synthetic data: Bridging the reality gap by do-
main randomization. In Proceedings of the IEEE con-
ference on computer vision and pattern recognition
workshops, pages 969–977.
Xie, S. and Tu, Z. (2015). Holistically-nested edge detec-
tion. In Proceedings of the IEEE international confer-
ence on computer vision, pages 1395–1403.
Zheng, Z., Wang, P., Ren, D., Liu, W., Ye, R., Hu, Q.,
and Zuo, W. (2021). Enhancing geometric factors in
model learning and inference for object detection and
instance segmentation. IEEE Transactions on Cyber-
netics, 52(8):8574–8586.
Zhu, J.-Y., Park, T., Isola, P., and Efros, A. A. (2017).
Unpaired image-to-image translation using cycle-
consistent adversarial networks. In Proceedings of
the IEEE international conference on computer vi-
sion, pages 2223–2232.
AbSynth: Using Abstract Image Synthesis for Synthetic Training
729
