
Multidimensional Compressed Sensing for Spectral Light Field Imaging
Wen Cao
a
, Ehsan Miandji
b
and Jonas Unger
c
Media and Information Technology, Department of Science and Technology, Link
¨
oping University,
SE-601 74 Norrk
¨
oping, Sweden
Keywords:
Spectral Light Field, Compressive Sensing.
Abstract:
This paper considers a compressive multi-spectral light field camera model that utilizes a one-hot spectral-
coded mask and a microlens array to capture spatial, angular, and spectral information using a single
monochrome sensor. We propose a model that employs compressed sensing techniques to reconstruct the
complete multi-spectral light field from undersampled measurements. Unlike previous work where a light
field is vectorized to a 1D signal, our method employs a 5D basis and a novel 5D measurement model, hence,
matching the intrinsic dimensionality of multispectral light fields. We mathematically and empirically show
the equivalence of 5D and 1D sensing models, and most importantly that the 5D framework achieves or-
ders of magnitude faster reconstruction while requiring a small fraction of the memory. Moreover, our new
multidimensional sensing model opens new research directions for designing efficient visual data acquisition
algorithms and hardware.
1 INTRODUCTION
Computational cameras for light field capture, (Levoy
and Hanrahan, 1996; Gortler et al., 1996), post cap-
ture editing and scene analysis have become increas-
ingly popular and found applications ranging from
photography and computer vision to capture of neu-
ral radiance fields. Light field imaging aims to ob-
tain multidimensional optical information including
spatial, angular, spectral, and temporal sampling of
the scene. Inherent to most light field capture sys-
tems is the trade-off between the complexity and cost
of the acquisition system and the output image qual-
ity in terms of spatial and angular resolution. On
one hand camera arrays, (Wilburn et al., 2005), offer
high resolution but comes with high cost and complex
bulky mechanical setups, while systems based on mi-
crolens, or lenslet, arrays placed in the optical path,
(Ng et al., 2005), sacrifices resolution for the benefit
of light weight systems and lower costs.
A key goal in the development of next generation
light field imaging systems is to enable high quality
multispectral measurements of complex scenes based
on a minimum amount of input measurements. Fo-
cusing on cameras with lenslet arrays, such optical
a
https://orcid.org/0000-0002-2507-7288
b
https://orcid.org/0000-0002-4435-6784
c
https://orcid.org/0000-0002-7765-1747
systems capture 2D projections of the full 5D (spa-
tial, angular, spectral) light field image data. Recon-
struction of the high dimensional 5D data from the 2D
measurements is challenging, due to the dimension-
ality gap and high compression ratio resulting from
undersampling of, e.g., the spectral domain. Com-
pressed sensing (CS) has emerged as a popular ap-
proach for light field reconstruction, however, cur-
rent systems are either not designed for multispec-
tral reconstruction, (Marwah et al., 2013; Miandji
et al., 2019), and/or fundamentally rely on 1D CS
reconstruction, (Marquez et al., 2020), disregarding
the original signal dimensionality. Since a light field
is fundamentally a 5D object, a vectorized 1D rep-
resentation of such data will prohibit the exploita-
tion of data coherence along each dimension, which
has been observed in a number of previous works
on sparse representation of multidimensional data
(Miandji et al., 2019). Another problem with 1D re-
construction is that it inherently leads to prohibitively
large storage costs for the dictionary and sensing ma-
trices as well as long reconstruction times.
In this paper, we formulate the light field capture
and reconstruction as a multidimensional, nD, com-
pressed sensing problem. As a first step, see Fig. 1,
we learn a 5D dictionary ensemble (Miandji et al.,
2019) from the spatial (2D), angular (2D), and spec-
tral (1D) domains of a light field training set. Using a
Cao, W., Miandji, E. and Unger, J.
Multidimensional Compressed Sensing for Spectral Light Field Imaging.
DOI: 10.5220/0012431300003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 4: VISAPP, pages
349-356
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
349
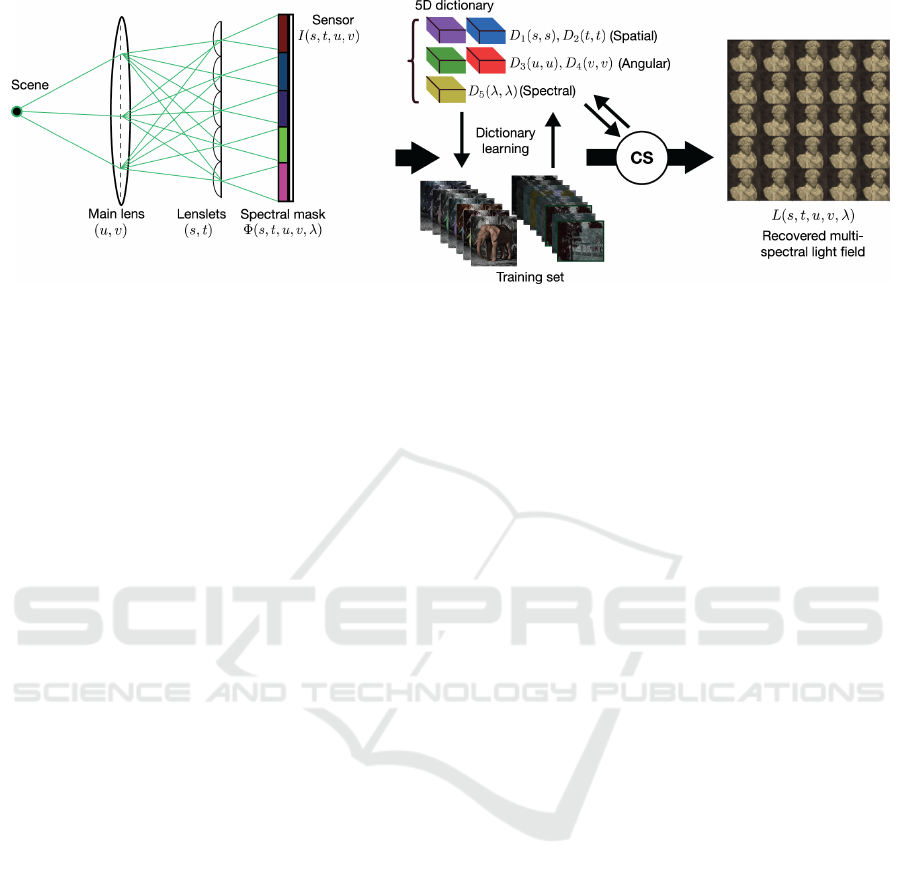
Figure 1: Illustrates the proposed compressed sensing framework for multi-spectral light field capture and reconstruction.
Compressed light fields are captured using a lenslet array placed in the optical path and a one-hot spectral CFA mask placed
on the sensor. Our proposed nD compressed sensing formulation improves the reconstruction time by orders of magnitude as
compared to the commonly used 1D compressed sensing techniques without any quality degradation.
novel 5D sensing model based on a one-hot sampling
pattern (implemented as a multispectral color filter ar-
ray (CFA) on the sensor), we obtain measurements of
a light field in the test set. The 5D sensing model
is composed of 5 measurement matrices, each corre-
sponding to one dimension of the light field. By ran-
domizing the one-hot measurement for each measure-
ment matrix, we promote the incoherence of the mea-
surement matrices with respect to the 5D dictionary.
The one-hot spectral sampling mask allows us to de-
sign a spectral light field camera with a monochrome
sensor. Another advantage of the one-hot mask is
cost-effectiveness, since it has a similar manufac-
turing complexity compared to a Color Filter Array
(CFA), which is commonly used in consumer-level
digital cameras. Finally, we extend the Smoothed-ℓ
0
(SL0) method for 2D signals (Ghaffari et al., 2009) to
5D signals, enabling fast reconstructions of the light
field from the measurements without the need for ma-
nipulating the dimensionality of the light field.
The main contributions are:
• A novel nD formulation for a single sensor
compressive spectral light field camera design,
where a one-hot sensing model together with a
learned multidimensional sparse representation is
utilized.
• An nD recovery method that is more than two or-
ders of magnitude faster than the widely used 1D
formulation and recovery.
• We show, both theoretically and experimentally,
that the nD formulation is far superior to the 1D
variant both in terms of memory and speed.
Our sensing model derivation shows that the nD
sensing is mathematically equivalent to 1D sensing
with the same number of samples. Experimental re-
sults confirm such equivalence in terms of reconstruc-
tion quality. Most importantly, the evaluations show
that the proposed novel formulation produces high
quality results orders of magnitude faster compared to
methods based on 1D compressed sensing. Our multi-
dimensional sensing model opens up flexible sensing
mask designs where each dimension can be treated
individually.
2 RELATED WORK
Common approaches for light field imaging include
the use of coded apertures (Liang et al., 2008; Baba-
can et al., 2009) and lenslet arrays (Ng et al., 2005),
and more recently combinations of the two (Marquez
et al., 2020). Combining compressive sensing with
spectrometers, coded aperture snapshot spectral im-
agers are also known as compressive spectral imagers
(CASSI). In general, a CASSI system consists of a
coded mask, prisms, and an imaging sensor. Exam-
ples of capture systems are for example described
by (Hua et al., 2022), and (Xiong et al., 2017). Based
on the detector measurements and the coded mask in-
formation the final spectral images or light fields are
then typically reconstructed using compressed sens-
ing methods (Arce et al., 2014; Marquez et al., 2020;
Yuan et al., 2021). Recently, deep learning based
methods have shown promising results for the appli-
cation of multispectral image reconstruction, for an
overview, see the survey by (Huang et al., 2022). Re-
lated to our approach (Schambach et al., 2021) pro-
posed a multi-task deep learning method to estimate
the center view and depth from the coded measure-
ments. The approach yields good results, but is not di-
rectly comparable to our approach since the aim here
is to recover the full 5D light field and not a depth
map.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
350

Compared to previous work, our nD formulation
presents several benefits such as flexible design of the
5D light field sensing masks as well as orders of mag-
nitude speed up without any quality degradation as
compared to the 1D sensing used in previous work.
One of the key insights, and contributions, enabling
the nD CS framework is the sensing mask formulation
illustrated in Fig. 2, where the Kronecker product of a
set of small design matrices lead to the one-hot CFA
mask used for nD compressed sampling. This as well
as our general formulation are described in detail in
the next section.
3 MULTIDIMENSIONAL
COMPRESSIVE LIGHT FIELDS
Our capture system, see Fig. 1, records a set of an-
gular views as produced by the lenslet array, where a
one-hot spectral coded mask at the resolution of the
lenslet is placed on the sensor. In the design, we as-
sume that there are n different types of filters with dif-
ferent spectral characteristics available, and that the
goal is to formulate a one-hot coded mask such that
each measurement, or pixel on the sensor, integrates
the incoming light rays modulated by one of the n dif-
ferent filter types. This is motivated by the fact that
we want to enable capture of a well defined set of
spectral bands, typically defined by the imaging ap-
plication.
3.1 The Measurement Model
Our camera design measures the spatial and angular
information, while the spectral information, due to the
one-hot mask, is compressed to a single value. Let
L(s,t,u,v,λ) represent the light field function follow-
ing the commonly used two-plane parameterization,
where (s,t) and (u, v) denotes the spatial and angu-
lar dimensions, and λ the spectral dimension. More-
over, let I(s,t,u,v) be the compressed measurements
recorded by the sensor. We formulate the multispec-
tral compressive imaging pipeline as follows
I(s,t,µ,ν) =
Z
λ
Φ(s,t, u,v,λ)L(s,t,u,v,λ)dλ, (1)
where Φ(s,t,u, v,λ) is the 5D sensing operator, as
shown in Fig. 2. Specifically, due to our design of
the one-hot binary mask, we have
n
∑
λ=1
Φ[s,t, u,v,λ] = 1, (2)
making sure that only one spectral channel is sampled
for every pixel on the monochrome sensor.
Figure 2: Illustration of Kronecker-based coded attenuation
masks.
According to (1), our goal is to recover the full
multispectral light field L from its measurements I
and with the knowledge of the measurement operator
Φ constructed from the one-hot mask. Indeed, since
(1) is a linear measurement model, we can rewrite it
as I = ΦL, where L is the light field arranged in a vec-
tor and Φ is the measurement matrix. In this case,
recovering L amounts to solving an underdetermined
system of linear equations, which is a topic addressed
by compressed sensing (Candes and Wakin, 2008).
3.2 Compressed Sensing
The underdetermined system of linear equations I =
ΦL can be solved by regularizing the problem based
on sparsity of the light field in a suitable basis or dic-
tionary D as follows
argmin
α
∥α∥
0
s.t. ||I − ΦDα||
2
≤ ε, (3)
where ε is a user-defined threshold for the data fidelity
and ∥.∥
0
denotes the ℓ
0
pseudo-norm. The dictionary
D can be obtained from analytical basis function, e.g.,
Discrete Cosine Transform (DCT), or by training-
based algorithms, e.g., K-SVD (Aharon et al., 2006).
Equation (3) can be solved by several algorithms and
in this paper we use Smoothed-ℓ
0
(SL0) (Mohimani
et al., 2010). We note that (3) solves a 1D compressed
sensing problem, and therefore utilizes a 1D dictio-
nary. As mentioned, our goal is to solve (3) using
multidimensional dictionaries and a multidimensional
sensing model.
3.3 Learning-Based Multidimensional
Dictionary
To this end, we utilize the Aggregated Multidimen-
sional Dictionary Ensemble (AMDE) (Miandji et al.,
2019) to train an ensemble of 5D orthogonal dictio-
naries to efficiently represent spatial, angular, and
spectral dimensions of a light field. In particu-
lar, we have D
1
∈ R
s×s
,D
2
∈ R
t×t
,D
3
∈ R
u×u
,D
4
∈
R
v×v
,D
5
∈ R
λ×λ
. The 1D dictionary, used in (3), can
be obtained from a 5D dictionary using the Kronecker
Multidimensional Compressed Sensing for Spectral Light Field Imaging
351

product (Duarte and Baraniuk, 2012) as follows
D = D
5
⊗ D
4
⊗ D
3
⊗ D
2
⊗ D
1
, (4)
where D ∈ R
stuvλ×stuvλ
. Indeed, the storage cost of D
is prohibitively large compared to the per-dimension
dictionaries D
i
. The memory requirement ratio be-
tween a 1D and a 5D dictionary is
(stuvλ)
2
s
2
+t
2
+u
2
+v
2
+λ
2
.
This further motivates a multidimensional dictionary
and sensing model.
3.4 Multidimensional Measurement
Model
In multidimensional sensing, a requirement is to in-
troduce a separate sensing operator for each dimen-
sion of the signal. Since a light field is 5D, we need
to design 5 sensing operators to obtain measurements
from the spatial, angular, and spectral domains. Let
Φ
j
, j = 1,...,5 be the set of sensing matrices (or op-
erators) for a 5D light field. Utilizing the n-mode
product between a tensor and a matrix (Kolda and
Bader, 2009), we can formulate the multidimensional
measurement model as follows
I = L ×
1
Φ
1
×
2
Φ
2
×
3
Φ
3
×
4
Φ
4
×
5
Φ
5
(5)
where L ∈ R
s×t×u×v×λ
is the light field tensor and
I ∈ R
s×t×u×v
is the compressed measurements on the
sensor. The choice of sensing matrices Φ
j
is of utmost
importance in any compressive acquisition setup. Due
to our camera design in Fig. 1, i.e. the use of a lenslet
array, we do not perform compression on spatial and
angular domains. As a result, Φ
j
, j = 1,. ..,4, are
identity matrices. However, we would like to maxi-
mize the incoherence between the dictionary and the
sensing matrices (Candes and Wakin, 2008). There-
fore, as illustrated in Fig. 2, we perform a random
row-shuffling of the identity matrices to form Φ
j
, j =
1,. ..,4. On the other hand, since we perform spec-
tral compression using the one-hot mask, Φ
5
∈ R
1×n
contains only one nonzero value, where n is the to-
tal number of spectral bands. In our experiments, we
used data sets where n = 13.
The multidimensional measurement model in (5)
can be converted to a 1D measurement model as fol-
lows
I = (Φ
5
⊗ Φ
4
⊗ Φ
3
⊗ Φ
2
⊗ Φ
1
)
| {z }
Φ
L, (6)
where L and I are vectorized forms of the tensors L
and I , respectively. An illustration of the Kronecker
product of sensing matrices Φ
j
is shown in Fig. 2.
Note that the key benefit of the nD sensing model re-
quires several orders of magnitude less memory com-
pared to the Kronecker 1D sensing model in (6). Re-
call from Section 3.3 that our 5D AMDE dictionary
also exhibits such benefits. The nD approach also
comes with the benefit that the sensing mask can be
designed using only five small matrices.
The psuedo-code in Algorithm 1 illustrates nD
SL0 reconstruction given the measurements I and the
matrices A
(i)
= Φ
i
D
i
as presented in Section 3.5.
Algorithm 1: Multidimensional SL0 algorithm.
Require: Input tensor I , input matrices A
(1...n)
, limit
parameter σ
min
, decreasing factor σ
f
, iteration L,
step µ
Ensure: S as sparse solution of S ×
1...n
A
(1...n)
= I
1: S ← I ×
1...n
A
(1...n)†
{initial estimate, † de-
notes pseudo-inverse}
2: σ ← largest absolute element of I
3: while σ > σ
min
do
4: for k = 1 .. .L do
5: ∆S = −
S
σ
2
◦ exp
−
S ◦S
2σ
2
6:
ˆ
S ← µ · ∆S {Steepest ascent step}
7:
ˆ
S ←
ˆ
S − (
ˆ
S ×
1...n
A
(1...n)
− I ) ×
1...n
A
(1...n)†
8: end for
9: S ←
ˆ
S
10: σ = σ
f
· σ
11: end while
3.5 Reconstruction
Given the AMDE dictionary in Section 3.3 and the
multidimensional measurement model in Section 3.4,
we formulate the 5D light field recovery algorithm
from its measurements as follows
argmin
S
∥S ∥
0
s.t. ∥I − S ×
1
Φ
1
D
1
×
2
Φ
2
D
2
×
3
Φ
3
D
3
×
4
Φ
4
D
4
×
5
Φ
5
D
5
∥
2
≤ ε, (7)
where S ∈ R
s×t×u×v×λ
is a sparse coefficient vector.
Once the coefficients are obtained, the full light field
is computed as
ˆ
L = S ×
1
D
1
×
2
D
2
×
3
D
3
×
4
D
4
×
5
D
5
. To solve (7), we extend the 2D SL0 algorithm
(Ghaffari et al., 2009) for higher dimensional signals.
A pseudo-code of the 5D SL0 algorithm is provided
in Algorithm 1.
4 EVALUATION AND RESULTS
We evaluate our multispectral light field camera de-
sign and CS framework using the multispectral data
set published by (Schambach and Heizmann, 2020).
As training set we randomly choose 60 out of the 500
random scenes, and as test set we use the five hand-
crafted scenes. The [512 × 512 × 5 × 5 × 13] light
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
352
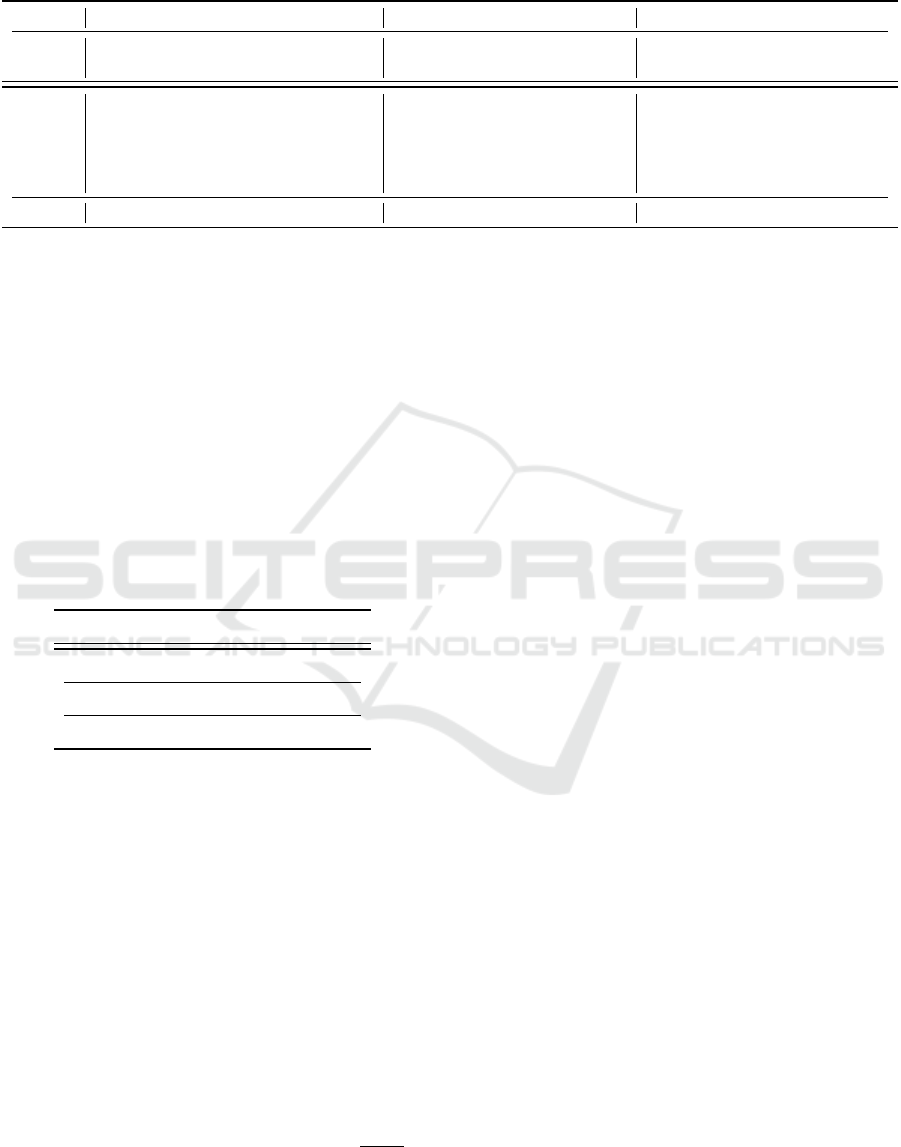
Table 1: Comparing 5D DCT, 1D AMDE and 5D AMDE using five test spectral light fields under ONE snapshot. Proposed
Method in blue. Best values in bold.
Test Methods PSNR /dB SSIM SA/(
◦
)
Scenes 5D 1D 5D 5D 1D 5D 5D 1D 5D
DCT AMDE AMDE DCT AMDE AMDE DCT AMDE AMDE
Bust 25.388 31.944 31.944 0.741 0.812 0.812 22.6658 10.853 10.853
Cabin 15.798 20.275 20.2754 0.302 0.636 0.636 53.767 26.977 26.977
Circles 15.459 18.494 18.494 0.313 0.530 0.530 35.216 29.588 29.588
Dots 15.454 23.485 23.485 0.247 0.738 0.738 24.661 10.668 10.668
Elephants 18.108 24.880 24.880 0.5761 0.743 0.7435 23.161 17.356 17.356
Average 14.631 22.398 22.398 0.324 0.627 0.627 35.54 24.804 24.804
fields exhibit a spatial resolution of 512 × 512 pix-
els and an angular resolution of 5 × 5 views sampled
in 13 spectral bands in steps of 25 nm from 400 nm
to 700 nm. For all experiments we use a patch size of
5×5×4×4×13, where the one-hot encoded mask il-
lustrated in Fig. 2 samples the spectral domain using a
single sample per pixel, leading to a compression ratio
of 1/13 corresponding to 7.69% of the original sam-
ples. We also report our results with multiple shots,
i.e. when multiple shots are taken by the camera sys-
tem in Fig. 1, where the mask pattern is changed for
each shot.
Table 2: Average Reconstruction Time of 5D DCT, 1D
AMDE and 5D AMDE per spectral light field using ONE
snapshot.
Methods Reconstruction Time
5D DCT 40.3 seconds
1D AMDE 2.4 hour
5D AMDE 79.5 seconds
Table 1 compares 5D CS using the AMDE basis
described above to 1D CS using AMDE in terms of
peak signal-to-noise ratio (PSNR), structural similar-
ity index measure (SSIM), and spectral angle (SA).
We also include 5D DCT as representative for com-
monly used analytical bases in compressed sensing.
The results show that our novel nD formulation and
the resulting 5D multidimensional sensing mask per-
form as expected with PSNR, SSIM, and SA on par
with the 1D approach. The important difference, how-
ever, is that the nD formulation is orders of magni-
tude faster, specifically 106 times faster, running on
a machine with 16 CPU cores operating at 4.5GHz.
The average reconstruction time comparison of the
5D CS and 1D CS is provided in Table 2. More im-
portantly, our 5D sensing and reconstruction require
only a fraction of the memory, specifically
1
107729
=
9.2825e − 06.
Generally, an imaging system can take more snap-
shots to get more measurements. This can yield better
results for compressive sensing methods (Yuan et al.,
2021). As all previous evaluations were conducted
under a single snapshot condition, we can signifi-
cantly enhance the reconstruction quality by employ-
ing additional snapshots as shown in Fig. 3. Specifi-
cally, when utilizing five snapshots for recovering the
elephant scene with the 5D AMDE basis, the recov-
ered spectral light field exhibits accurate colors. Al-
though the 5D DCT basis also shows improved re-
construction with an increased number of snapshots,
it fails in accurately reproducing colors.
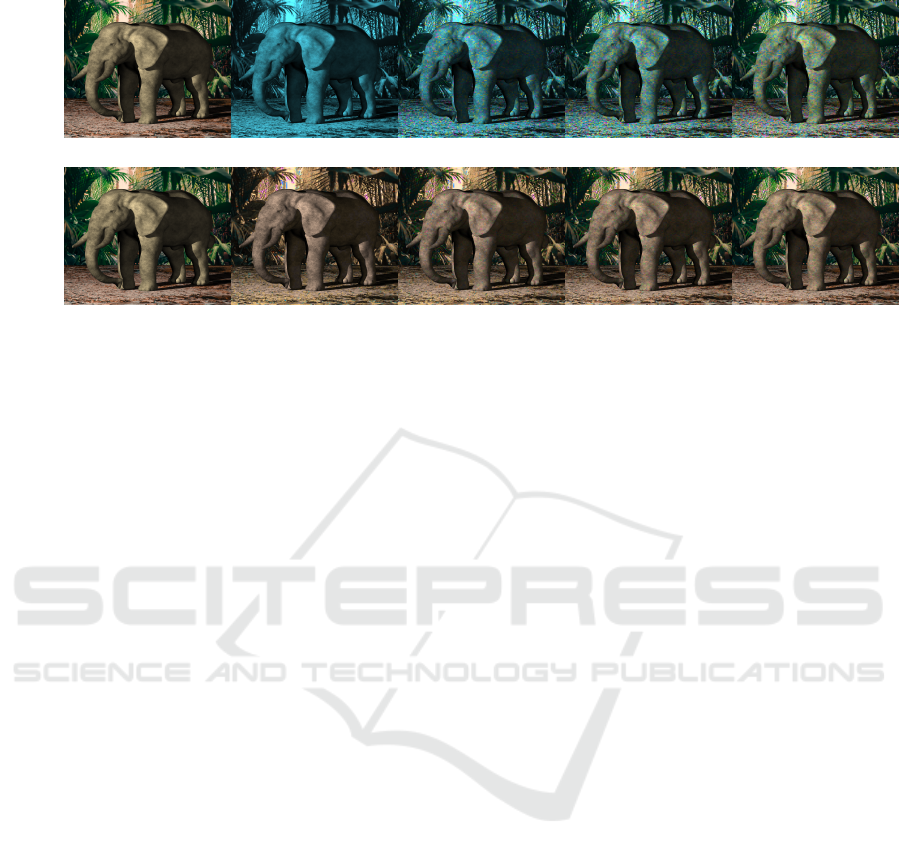
Furthermore, Fig. 4 presents a comparative visu-
alization of the reconstruction results of the spectral
light field for all scenes in Table 1 using three snap-
shots. As expected, 5D CS using the AMDE basis
achieves visually identical results when compared to
1D AMDE. And 5D AMDE outperforms the 5D CS
with the DCT basis as 5D DCT cannot faithfully re-
cover spectral information.
5 CONCLUSIONS
This paper introduced a sensing and reconstruction
method for fast multispectral light field acquisition.
We believe that our novel nD formulation, and in par-
ticular the one-hot sampling strategy, opens up new
research directions for fast acquisition of other data
modalities in computer graphics, e.g. BRDFs, BTF,
and light field videos. Multidimensional sensing and
dictionary learning allows us to have different sam-
pling strategies for each dimension. For instance, one
can choose to take full spectral information and sub-
sample the angular information. Hence, our nD for-
mulation facilitates the design of new visual data ac-
quisition devices. Another interesting aspect of the
proposed method is the utilization of learned dictio-
naries, which we show to outperform analytical dic-
tionaries such as DCT.
Multidimensional Compressed Sensing for Spectral Light Field Imaging
353
Ground Truth 1 Snapshot 3 Snapshots 5 Snapshots 7 Snapshots
5D DCT
PSNR 18.1089 18.3892 19.4972 21.2688
5D AMDE
PSNR 24.8808 25.0373 26.4341 28.7968
Figure 3: 5D CS Performance comparison (5D DCT, 5D AMDE) of reconstruction results using different number of snapshots
of Elephant scene. Captions are identical to Fig. 4.
ACKNOWLEDGEMENTS
This project has received funding from the European
Union’s Hori- zon 2020 research and innovation pro-
gram under Marie Skłodowska- Curie grant agree-
ment No956585. We thank the anonymous reviewers
for their feedback.
REFERENCES
Aharon, M., Elad, M., and Bruckstein, A. (2006). K-SVD:
An algorithm for designing overcomplete dictionaries
for sparse representation. IEEE Transactions on Sig-
nal Processing, 54(11):4311–4322.
Arce, G. R., Brady, D. J., Carin, L., Arguello, H., and Kittle,
D. S. (2014). Compressive Coded Aperture Spectral
Imaging: An Introduction. IEEE Signal Processing
Magazine, 31(1):105–115. Conference Name: IEEE
Signal Processing Magazine.
Babacan, S. D., Ansorge, R., Luessi, M., Molina, R., and
Katsaggelos, A. K. (2009). Compressive sensing of
light fields. In Proceedings of the 16th IEEE ICIP,
ICIP’09, page 2313–2316. IEEE Press.
Candes, E. J. and Wakin, M. B. (2008). An Introduction
To Compressive Sampling. IEEE Signal Processing
Magazine, 25(2):21–30. Conference Name: IEEE
Signal Processing Magazine.
Duarte, M. F. and Baraniuk, R. G. (2012). Kronecker Com-
pressive Sensing. IEEE Transactions on Image Pro-
cessing, 21(2):494–504. Conference Name: IEEE
Transactions on Image Processing.
Ghaffari, A., Babaie-Zadeh, M., and Jutten, C. (2009).
Sparse decomposition of two dimensional signals. In
2009 IEEE International Conference on Acoustics,
Speech and Signal Processing, pages 3157–3160.
Gortler, S. J., Grzeszczuk, R., Szeliski, R., and Cohen, M. F.
(1996). The lumigraph. In Proceedings of the 23rd an-
nual conference on Computer graphics and interac-
tive techniques, SIGGRAPH ’96, pages 43–54, New
York, NY, USA. ACM.
Hua, X., Wang, Y., Wang, S., Zou, X., Zhou, Y., Li,
L., Yan, F., Cao, X., Xiao, S., Tsai, D. P., Han, J.,
Wang, Z., and Zhu, S. (2022). Ultra-compact snapshot
spectral light-field imaging. Nature Communications,
13(1):2732. Number: 1 Publisher: Nature Publishing
Group.
Huang, L., Luo, R., Liu, X., and Hao, X. (2022). Spectral
imaging with deep learning. Light: Science & Appli-
cations, 11(1):61.
Kolda, T. G. and Bader, B. W. (2009). Tensor decomposi-
tions and applications. SIAM Review, 51(3):455–500.
Levoy, M. and Hanrahan, P. (1996). Light field render-
ing. In Proceedings of the 23rd annual conference on
Computer graphics and interactive techniques - SIG-
GRAPH ’96, pages 31–42, Not Known. ACM Press.
Liang, C.-K., Lin, T.-H., Wong, B.-Y., Liu, C., and Chen,
H. H. (2008). Programmable aperture photogra-
phy: Multiplexed light field acquisition. ACM Trans.
Graph., 27(3):1–10.
Marquez, M., Rueda-Chacon, H., and Arguello, H. (2020).
Compressive Spectral Light Field Image Reconstruc-
tion via Online Tensor Representation. IEEE Trans-
actions on Image Processing, 29:3558–3568.
Marwah, K., Wetzstein, G., Bando, Y., and Raskar, R.
(2013). Compressive light field photography using
overcomplete dictionaries and optimized projections.
ACM Transactions on Graphics, 32(4):1–12.
Miandji, E., Hajisharif, S., and Unger, J. (2019). A Unified
Framework for Compression and Compressed Sens-
ing of Light Fields and Light Field Videos. ACM
Transactions on Graphics, 38(3):1–18.
Mohimani, H., Babaie-Zadeh, M., Gorodnitsky, I., and Jut-
ten, C. (2010). Sparse Recovery using Smoothed
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
354
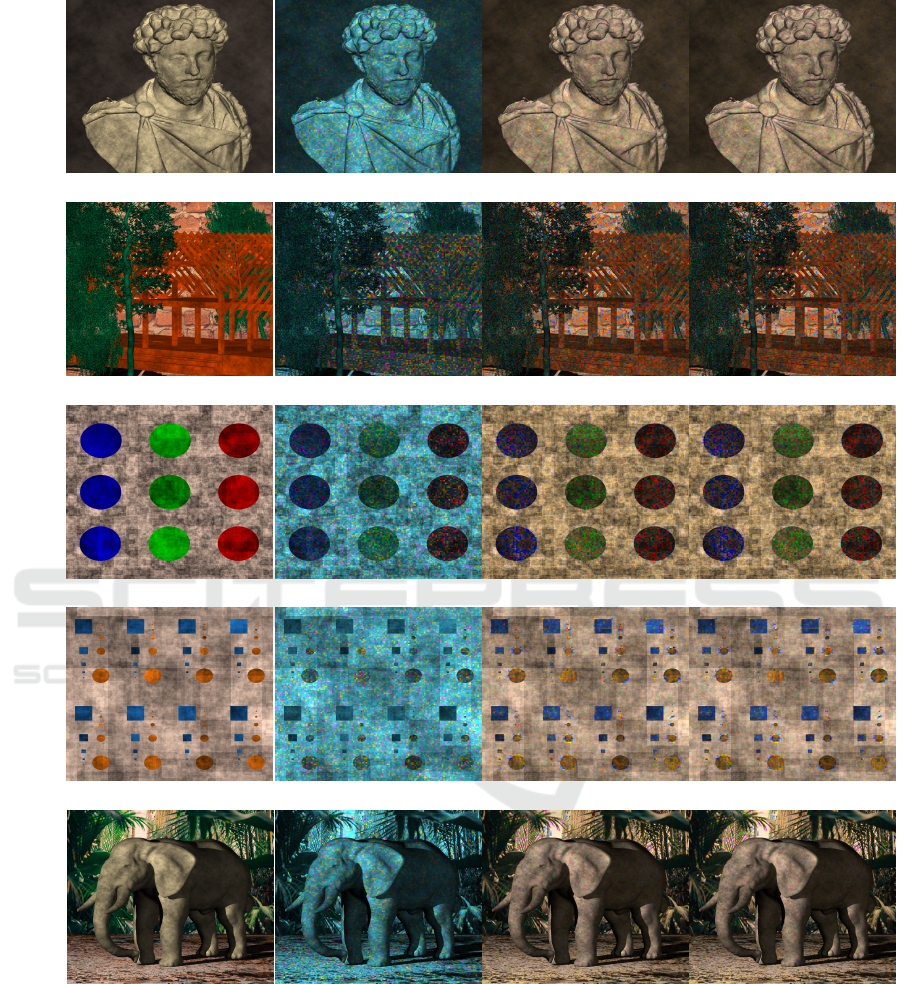
Ground Truth 5D DCT 1D AMDE 5D AMDE
Bust
PSNR 25.4520 32.1021 32.1021
Cabin
PSNR 16.1041 21.5743 21.5743
Circles
PSNR 15.6698 18.9974 18.9974
Dots
PSNR 16.1914 24.7977 24.7977
Elephant
PSNR 18.3892 25.0373 25.0373
Figure 4: Performance comparison of Reconstruction Results of 5D DCT, 1D AMDE and 5D AMDE of five test spectral light
fields using three snapshots. Evaluation metric PSNR in dB. The multi-spectral channels are converted to RGB according to
CIE 1913 and CIE D65. The images are chosen as the angular image [2 3] out of the 5 × 5 reconstructed views.
Multidimensional Compressed Sensing for Spectral Light Field Imaging
355

(SL0): Convergence Analysis. arXiv:1001.5073 [cs,
math].
Ng, R., Levoy, M., Br
´
edif, M., Duval, G., Horowitz, M., and
Hanrahan, P. (2005). Light Field Photography with
a Hand-held Plenoptic Camera. Tech Report CSTR
2005-02, Stanford university.
Schambach, M. and Heizmann, M. (2020). A Multispectral
Light Field Dataset and Framework for Light Field
Deep Learning. IEEE Access, 8:193492–193502.
Conference Name: IEEE Access.
Schambach, M., Shi, J., and Heizmann, M. (2021). Spectral
Reconstruction and Disparity from Spatio-Spectrally
Coded Light Fields via Multi-Task Deep Learning.
arXiv:2103.10179 [cs].
Wilburn, B., Joshi, N., Vaish, V., Talvala, E.-V., Antunez,
E., Barth, A., Adams, A., Horowitz, M., and Levoy,
M. (2005). High performance imaging using large
camera arrays. ACM Trans. Graph., 24(3):765–776.
Xiong, Z., Wang, L., Li, H., Liu, D., and Wu, F. (2017).
Snapshot Hyperspectral Light Field Imaging. In 2017
IEEE Conference on Computer Vision and Pattern
Recognition (CVPR), pages 6873–6881, Honolulu,
HI. IEEE.
Yuan, X., Brady, D. J., and Katsaggelos, A. K. (2021).
Snapshot Compressive Imaging: Theory, Algorithms,
and Applications. IEEE Signal Processing Magazine,
38(2):65–88.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
356
