
A Supervised Machine Learning Approach for the Vehicle Routing
Problem
Sebastian Ammon
1
, Frank Phillipson
1,2 a
and Rui Jorge Almeida
1 b
1
School of Business and Economic, Maastricht University, Maastricht, The Netherlands
2
TNO, The Hague, The Netherlands
Keywords:
Supervised Machine Learning, Vehicle Routing Problem, Graph Convolutional Network, Optimisation.
Abstract:
This paper expands on previous machine learning techniques applied to combinatorial optimisation problems,
to approximately solve the capacitated vehicle routing problem (VRP). We leverage the versatility of graph
neural networks (GNNs) and extend the application of graph convolutional neural networks, previously used
for the Travelling Salesman Problem, to address the VRP. Our model employs a supervised learning tech-
nique, utilising solved instances from the OR-Tools solver for training. It learns to provide probabilistic
representations of the VRP, generating final VRP tours via non-autoregressive decoding with beam search.
This work shows that despite that reinforcement learning based autoregressive approaches have better perfor-
mance, GNNs show great promise to solve complex optimisation problems, providing a valuable foundation
for further refinement and study.
1 INTRODUCTION
The vehicle routing problem (VRP) is a classical and
complex combinatorial optimisation problem in the
field of operations research (OR). At its core, the
problem involves finding the most efficient routes for
a fleet of vehicles to visit a set of locations, while sat-
isfying operational constraints. It is the generalised
variant of the travelling salesman problem (TSP), for
which there is only one vehicle (travelling salesman).
The VRPs complexity and relevance across various
sectors such as transportation, logistics, and supply
chain management make it a significant subject. For
example, the problem has practical applications in
last-mile package delivery, the operations carried out
by companies such as DPD, UPS and FedEx among
others. With demand for last-mile delivery expected
to grow by 78% by 2030, the world’s top 100 cities
(Hillyer, 2020) are expected to see an increase in de-
livery vehicles and therefore carbon emissions. Thus,
improvements in route optimisation can have a posi-
tive impact on the global carbon footprint. This makes
it important to study different views and approaches
to realise these improvement in the near future.
To solve VRPs optimally, an approach like linear
a
https://orcid.org/0000-0003-4580-7521
b
https://orcid.org/0000-0002-5844-0768
programming can be used to solve small-sized prob-
lem instances. However obtaining optimal solutions
is challenging when the problem size increases due to
the NP-hard nature (Archetti et al., 2011). To miti-
gate this issue, heuristic methods such as the Clarke
& Wright’s savings algorithm (Clarke and Wright,
1964) trade solution quality for reduced computa-
tion time, see (Konstantakopoulos et al., 2020) for a
survey of these methods. Developing such heuristic
methods is not trivial and often require experts do-
main knowledge, problem-specific assumptions and
constraints. Furthermore, these heuristics fail to gen-
eralise to small changes in the inputs and need to be
solved from scratch (Bogyrbayeva et al., 2022).
In recent years, machine learning (ML), with its
ability to learn from and make decisions based on
data, has emerged as a promising tool for solving
complex problems. The strength of using ML is its
ability to “learn” approximations of functions, with-
out the need to explicitly formulate these functions
(Bogyrbayeva et al., 2022). While combinatorial op-
timisation problems have traditionally been part of the
OR community, this incredible versatility of ML has
led to an increased interest in the ML community to
tackle combinatorial optimisation problems without
explicitly exploiting the structures of the mathemat-
ical models (Bai et al., 2023).
This paper aims to advance the ML and OR
364
Ammon, S., Phillipson, F. and Almeida, R.
A Supervised Machine Learning Approach for the Vehicle Routing Problem.
DOI: 10.5220/0012430000003639
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th International Conference on Operations Research and Enterprise Systems (ICORES 2024), pages 364-371
ISBN: 978-989-758-681-1; ISSN: 2184-4372
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

communities’ intersection by using graph neural net-
works (GNNs) to address the challenging capacitated
VRP. In the literature, two main methods are preva-
lent: supervised and reinforcement learning. Super-
vised learning (SL) approximates VRP solutions us-
ing training data, while reinforcement learning is em-
ployed when such solutions are unavailable. We in-
vestigate the effectiveness of a supervised ML ap-
proach in solving the capacitated VRP, which is an
underexplored area, as discussed in the following sec-
tion. To accomplish this, we extend the work of (Joshi
et al., 2019), who applied a graph convolutional neu-
ral network (GCNN) to the TSP.
2 RELATED WORK
In 1985, Hopfield and Tank were the first to demon-
strate the use of a neural network to solve the TSP
(Hopfield and Tank, 1985), which is related to VRP.
They used the Hopfield neural network converting
the objective function of the problem into the en-
ergy function of the neural network. This allowed the
network to find locally optimal solutions to the TSP
with up to 30 nodes (cities). Most of the early litera-
ture in this area focused on tackling the TSP through
Hopfield networks and self-organising feature maps
(Smith, 1999).
Over the last two decades, there has been increas-
ing interest in using neural networks to solve com-
binatorial optimisation problems, including a wide
range of routing problems and their variants. A no-
table contribution is the introduction of the pointer
network by (Vinyals et al., 2015), which consists of an
encoder and decoder implemented as recurrent neu-
ral networks (RNNs). Using SL, the model is able
to generate a probability distribution (heat-map) over
the cities to be visited. During the inference stage,
beams search is used to generate valid tours for the
TSP. Although this approach gave promising results
for the TSP instance with up to 30 nodes, it faced
challenges when handling larger instances of up to
40 or 50 nodes. To address this limitation, (Bello
et al., 2017) extended the approach by incorporating
reinforcement learning with an actor-critic scheme,
which led to improved performance for TSP instances
with up to 100 nodes. This work was further ex-
tended by (Deudon et al., 2018) and (Kool et al.,
2019). Their models performs comparable to meth-
ods such as Concorde, LKH3 and Gurobi, and out-
performs approaches by (Vinyals et al., 2015), (Bello
et al., 2017), (Khalil et al., 2017) and (Nowak et al.,
2017) for the TSP. To address the dynamic nature of
the VRP, (Peng et al., 2020) extend (Kool et al., 2019)
with a dynamic attention model consisting of a dy-
namic encoder-decoder architecture. Another notable
contribution for solving VRPs with neural networks is
the work done by (Nazari et al., 2018). This allowed
them to solve the capacitated VRP and its variants;
split-delivery and stochastic VRPs. The model was
trained with an actor-critic scheme, and the solution
was obtained by beam search.
Several approaches exist that employ SL instead
of reinforcement learning. For instance, (Prates et al.,
2019) trains a GNN to determine if a TSP tour with a
cost below a given threshold exists. (Nowak et al.,
2017) and (Joshi et al., 2019) take an end-to-end
approach, training GNN and GCNN models to out-
put probable edge connections between nodes non-
autoregressively, converting these connections into
valid TSP tours using beam search. While Joshi’s ap-
proach outperforms autoregressive methods (Vinyals
et al., 2015; Bello et al., 2017; Khalil et al., 2017;
Kool et al., 2019), it faces limitations as instance
sizes increase. The work in (Fu et al., 2021) ad-
dresses large-scale TSPs by dividing the graph into
subgraphs, training a model to produce probability
matrices for each subgraph, and using Monte Carlo
tree search (MCTS) to find solutions. Duan (Duan
et al., 2020) combines reinforcement and SL, using a
GCNN encoder and two decoders to effectively solve
VRPs based on real-world data.
There are hybrid methods that combine ML with
non-learning techniques. (Kool et al., 2022) replaces
beam search with dynamic programming to solve TSP
and VRP, tackles (Li et al., 2021) large-scale VRP by
iteratively improving solutions with SL and a mixed
integer linear solver and (Hottung and Tierney, 2020)
uses a deep neural network trained by policy gradient
reinforcement learning to enhance large neighbour-
hood search (LNS) operators, outperforming other
LNS algorithms and previous ML-based methods.
In this work, we propose to extend the work by
(Joshi et al., 2019) to address the capacitated VRP.
3 METHODOLOGY
3.1 General Overview
Given a VRP graph with n nodes as input, our ap-
proach is to train a GNN through SL to output an
adjacency matrix P = {p
i j
}
n
i, j=0
corresponding to the
tours of the VRP. Each entry p
i j
∈ [0, 1] represents
the probability that nodes i and j are connected in
the VRP solution. We use beam search to decode the
probabilistic matrix P and output the final sequence
of nodes of the VRP tours.
A Supervised Machine Learning Approach for the Vehicle Routing Problem
365
Our proposed model
1
uses the GCNN presented
by (Joshi et al., 2019) for the TSP, but we adapt
the network architecture to support the VRP. The
model takes node and edge features as input and
learns an initial representation (embedding) vector for
each node and edge. The embedding vectors are
updated by passing through a series of graph con-
volution layers and exchanging information between
adjacent nodes and edges. This is known as the
message-passing framework, where at each layer (it-
eration) nodes and edges aggregate information (the
messages) from their local neighbourhood (Hamilton,
2020). This is the main idea that distinguishes stan-
dard neural networks from GNNs. This is a power-
ful mechanism because after passing through L layers,
node i and edge (i j) will have aggregated feature in-
formation from their L-hop neighbours into their own
feature vectors. This allows the GNN to incorporate
the structural (graph-like) nature of the problem.
The edge embedding vector from the last graph
convolution layer is passed through a multilayer per-
ceptron (MLP) to independently predict for each edge
whether it is part of the VRP solution or not. Finally,
we use a decoding strategy known as beam search to
take the edge predictions and generate a final VRP so-
lution.
3.2 Graph Convolutional Network for
Vehicle Routing Problem
3.2.1 Input Layer
The model receives node and edge features as input.
The input layer is responsible for projecting the ini-
tial feature vectors into a h-dimensional latent space.
We extend the approach of (Joshi et al., 2019) to sup-
port VRP by adding two additional node features and
removing one of the edge features, the edge type indi-
cator matrix. Each node i has an input feature vector
z
i
= [x
i
q
i
t
i
], where x
i
is the two-dimensional loca-
tion, q
i
is the demand, and t
i
is a node token. For the
depot node t
0
= 1 and for all other nodes t
i
= 0. With-
out loss of generality, we normalise the demand with
respect to the vehicle capacity per dataset. The node
feature vector is embedded in h dimensional space:
α
i
= A
1
z
i
+ b
1
(1)
where A
1
∈ R
h×4
and and b
1
are a trainable parameter
matrix and bias term, respectively. The Euclidean dis-
tance d
i j
is embedded as a h-dimensional edge feature
vector β
i j
defined as
β
i j
= A
2
d
i j
+ b
2
(2)
1
Code and data are available at https://github.com/seb
ammon/vrp-thesis
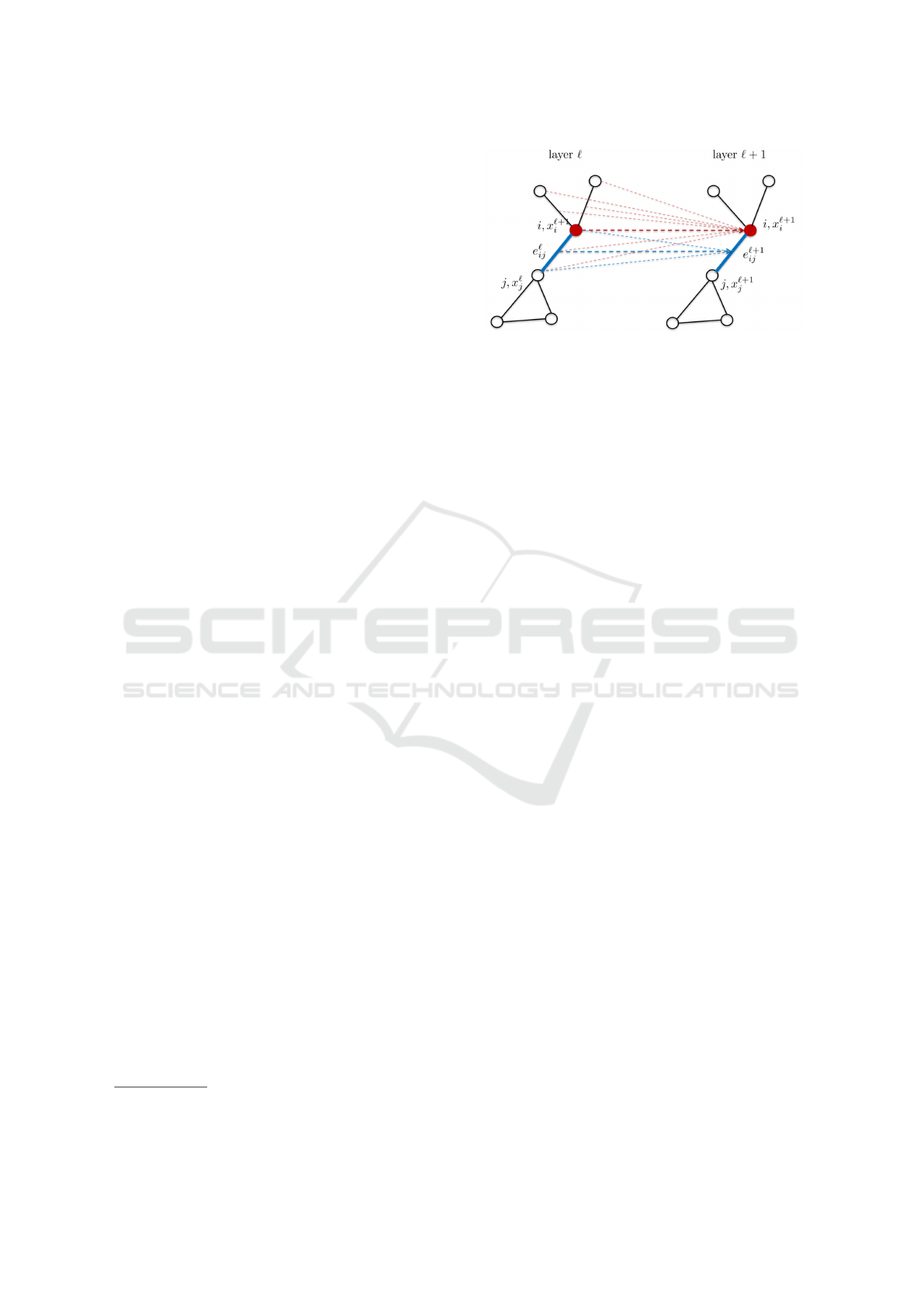
Figure 1: Illustration of how feature vectors at the next layer
ℓ + 1 aggregate information from their neighbours at the
previous layer ℓ. The dashed red and blue lines show the in-
formation flow for the node and edge features, respectively.
Adapted from (Joshi et al., 2019).
where A
2
∈ R
h×1
and b
2
are a trainable parameter ma-
trix and bias term, respectively. (Joshi et al., 2019)
also define an edge type indicator matrix to signal k-
nearest neighbours, self-connections and normal edge
connection types. They argue that this speeds up
learning since connected nodes in the TSP solution
are often in close proximity. We experimented with
this matrix but did not find that its presence improved
the learning process or the quality of the solution.
3.2.2 Graph Convolution Layer
The graph convolution layer is responsible for updat-
ing the node and edge feature vectors by aggregating
information from their local neighbourhoods. Let x
ℓ
i
and e
ℓ
i j
denote the node and edge feature vectors at
layer ℓ, for ℓ = 0, . . . , L, associated with node i and
edge (i j) respectively. In the input layer, x
ℓ=0
i
= α
i
and e
ℓ=0
i j
= β
i j
. The information aggregation for x
ℓ
i
and e
ℓ
i j
, at the next layer ℓ + 1 is:
x
ℓ+1
i
= UPD
ℓ
x
ℓ
i
, AGG
ℓ
{(x
ℓ
j
, η
ℓ
i j
),∀ j ∈ N (i)}
e
ℓ+1
i j
= UPD
ℓ
e
ℓ
i j
, AGG
ℓ
x
ℓ
i
, x
ℓ
j
where UPDATE (UPD) and AGGREGATE (AGG)
are arbitrary differentiable functions (Hamilton,
2020), N (i) is the set of neighbours for node i (which
are all nodes, since we use a fully connected input
graph), and η
ℓ
i j
are learnable edge gates. The edge
gates allow the model to learn the relative importance
of each neighbour of node i when aggregating their
information. Figure 1 shows the flow of information
between nodes and edges from one layer to the next.
More concretely, (Joshi et al., 2019) define the
node and edge feature vectors as:
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
366

x
ℓ+1
i
= x
ℓ
i
+ ReLU
BN
W
ℓ
1
x
ℓ
i
+
∑
j∈N (i)
η
ℓ
i j
⊙W
ℓ
2
x
ℓ
j
η
ℓ
i j
=
σ(e
ℓ
i j
)
∑
j
′
∈N (i)
σ(e
ℓ
i j
′
) + ε
,
e
ℓ+1
i j
= e
ℓ
i j
+ ReLU
BN
W
ℓ
3
e
ℓ
i j
+W
ℓ
4
x
ℓ
i
+W
ℓ
5
x
ℓ
j
,
where W
ℓ
1
,W
ℓ
2
,W
ℓ
3
,W
ℓ
4
,W
ℓ
5
∈ R
h×h
are trainable pa-
rameter matrices, σ is the sigmoid activation func-
tion, ⊙ is the Hadamard element-wise product, ε is
a small value, ReLU is the rectified linear unit func-
tion and BN applies the batch normalisation (Ioffe and
Szegedy, 2015). Due to the symmetric nature of the
VRP, W
ℓ
4
= W
ℓ
5
.
3.2.3 Multilayer Perceptron Classifier
An MLP is a fully connected feedforward artificial
neural network consisting of an input layer, hidden
layers and an output layer. The MLP is used to inde-
pendently compute the edge probability p
i j
, i.e., the
probability that edge (i j) is active in the final VRP
solution, from the final edge feature vector e
ℓ
i j
:
p
i j
= MLP(e
ℓ
i j
) (3)
The h dimensional hidden layers of the MLP are con-
nected via the ReLU activation function. We apply a
softmax activation function to the last layer to trans-
late it to the range [0,1].
3.2.4 Loss Function
The model is trained in a supervised fashion by min-
imising the weighted cross-entropy loss between the
edges P = {p
i j
}
n
i, j=0
predicted by the model and the
ground truth edges T = {t
i j
}
n
i, j=0
from the solver,
where n is the number of nodes. Cross-entropy is a
loss function commonly used for binary classification
tasks, which is essentially what this problem is – an
edge can be either active or inactive – defined as:
Loss
i j
=
1
∑
c=0
w
c
log(p
i j
)I
i j,c
, (4)
where I
i j,c
is defined as the indicator function that
takes the value of 1 if class is c, and 0 otherwise.
Since the adjacency matrix of VRP is usually
sparse, i.e., there are many more inactive edges than
active ones, (Joshi et al., 2019) provide the cross-
entropy with the weights for each class. They state
that the classification becomes highly unbalanced to-
wards the negative class as the problem size increases
and appropriate class weights are needed to mitigate
this issue. The class weights for each class c, active
or inactive, are calculated per dataset by:
w
c
=
n
2
·
∑
1
c=0
I
c
2 · I
c
where I
c
=
∑
n
i, j=0
I
i j,c
is the number of occurrences
of class c,
∑
1
c=0
I
c
is the number of instances in the
dataset. The loss per training epoch is calculated as
the average loss over all mini-batches.
3.3 Beam Search Decoding
The model outputs a probabilistic adjacency matrix of
edges, where each entry p
i j
indicates the probability
that the edge (i j) is part of the VRP solution. This
matrix cannot be converted directly into VRP routes,
e.g., using the argmax function, as this may result in
invalid tours with missing or redundant edges. A de-
coder is required to deal with this.
Beam search is a limited-width breadth-first
search algorithm commonly used to generate highly
probable output sequences for natural language pro-
cessing tasks (Medress et al., 1977). It iteratively ex-
pands the next most likely nodes, keeping only the b
most likely sequences found so far, where b refers to
the beam width. This is a greedy algorithm as it only
keeps a limited number of possible solutions.
Beam search decoding can be used to generate
tours (a sequence of nodes) by expanding the most
probable edges between nodes to form a tour. Accord-
ing to (Joshi et al., 2019), the probability of a partial
tour π
′
is based on the chain rule of probability as:
p(π
′
) =
∏
j
′
∼i
′
∈π
′
p
i
′
j
′
(5)
where each node j
′
follows node i
′
in the partial tour
π
′
. Starting from the first node i, the beam search ex-
pands the b most probable edges from the probability
adjacency matrix by exploring the neighbours of the
node. At each iteration, the next b most probable par-
tial tours are expanded until all nodes have been vis-
ited. To ensure that nodes are not visited more than
once, (Joshi et al., 2019) use a masking strategy to
hide previously visited nodes.
While the approach of (Joshi et al., 2019) works
well for a single TSP tour, it is not directly applica-
ble to VRP because it does not consider two points.
First, the fact that each vehicle requires a tour; second,
the capacity constraint of the vehicles. To address
the first point, we adapt the masking strategy to hide
the depot node only when it has been visited K many
times, where K is the number of vehicles. The other
nodes are masked as soon as they have been visited.
A Supervised Machine Learning Approach for the Vehicle Routing Problem
367

This translates into a tour per vehicle as follows: as-
suming a partial tour π
′
= {0, 3, 2, 4, 0, 1, 6, 5}, where
K = 2 and all n = 6 nodes have been visited, then
the tours for the two vehicles can be extracted as
R
1
= {0,3,2,4,0} and R
2
= {0,1,6,5,0}.
To take into account the second point, namely the
capacity constraints of the vehicles, we keep track of
the remaining capacity of the vehicle after visiting the
nodes of the partial tour. When expanding the next b-
most probable partial tours, we hide nodes where the
demand exceeds the remaining capacity of the vehicle
(current tour), which is reset when the depot node is
visited. We follow two beam search approaches to
construct the final tours.
3.3.1 Standard Beam Search
Following the description above, we generate b most
probable tours by specifying the beam width param-
eter. From these tours we select the one with the
highest probability in Equation 5. However, the most
probable tour is not guaranteed to be the shortest. For
this reason, we only use this approach during the vali-
dation phase when training the model. Intuitively, the
model improves its predictions as the probability of
promising edges should increase while the probabil-
ity of less promising edges should decrease. Using
the most promising tour during training gives an indi-
cation for model improvement.
3.3.2 Shortest Tour Heuristic
In this approach, instead of selecting the most proba-
ble tour among the candidates, we select the shortest
tour by evaluating and comparing the distance of each
tour. This algorithm takes considerably more time to
execute, so we only use it after training as a final eval-
uation of the model’s performance.
4 EXPERIMENTAL DESIGN
4.1 Data Setup
The data is based on the VRP in the two-dimensional
Euclidean plane. Given an input graph, we define a
VRP instance with n customers (nodes) as a sequence
of tuples S = {(x
i
,q
i
)}
n
i=0
, where x
i
∈ [0, 1]
2
is the lo-
cation in the unit square and q
i
∈ {1, ..., 9} is the de-
mand. We add a special node at index 0, called the
depot, with location x
0
and demand q
0
= 0. Addition-
ally we define the cost of each edge between nodes i
and j, to be the Euclidean distance d
i j
= ∥x
i
− x
j
∥
2
.
The goal is to find a set of routes (vehicles) that
start and stop at the depot, visiting each customer only
once (across all routes), while minimising the total
distance travelled. All vehicles are homogeneous and
each vehicle has a (positive) capacity (κ) that may not
be exceeded, so
∑
i∈R
k
q
i
≤ κ, where R
k
is the set of
nodes visited by vehicle k ∈ {1,...,K}.
To solve an instance to create training and valida-
tion instances, we use the VRP solver from the open
source software suite OR-Tools (Perron and Furnon,
2023). The solutions it finds are not guaranteed to
be optimal, as the solver uses heuristics along with
metaheuristics to find approximate solutions. As in-
put to the solver we give it a n × n distance matrix
D = {d
i j
}
n
i, j=0
, the customer demand q
i
, the depot
node index i = 0, the vehicle capacity κ and the to-
tal number of available vehicles K. Additionally, we
need to specify the heuristic and metaheuristic to be
used by the solver. Here we used the path cheapest
arc heuristic, as it is a constructive heuristic that incre-
mentally builds the routes from the depot by adding
the next node that produces the cheapest route seg-
ment (Perron and Furnon, 2023). For the metaheuris-
tic, we opt for Guided Local Search (Voudouris et al.,
2010), which guides the solver to escape local min-
ima. The stopping criterion used for this approach is
a time limit (in seconds). In order for the solver to
consistently find good solutions for different problem
sizes (number of nodes), we adjust the time limit for
each generated dataset.
The obtained set of routes {R
k
}
K
k=1
are then con-
verted into an adjacency matrix T
k
= {t
k
i j
}
n
i, j=0
, which
constitutes target matrix for model training. For each
entry in the target matrix, t
k
i j
= 1 if nodes i and j are
connected in route R
k
, and 0 otherwise. Due to the
symmetric nature of VRP, if nodes i and j are con-
nected, then the reverse is also true, hence t
k
i j
= t
k
ji
.
4.2 Training Procedure
To train the ML model, we generate training and vali-
dation data. To explore the ability of the model to gen-
eralise to different problem sizes, we generate three
different datasets, VRP10, VRP20 and VRP50 with
10, 20 and 50 customer nodes respectively. Following
the approach of (Nazari et al., 2018), for each dataset
we set the vehicle capacity to 20, 30 and 40 respec-
tively and the number of available vehicles to 4, 5 and
10. For the datasets VRP10 and VRP20, we generate
and solve 20,000 instances, of which 1,000 instances
are kept as a validation set. We set the time limit for
the metaheuristic to 1 and 3 seconds for each dataset.
For the VRP50 dataset, with the larger 50 node in-
stances, we increase the solver time limit to 8 seconds
in order to obtain better solutions. This marginal in-
crease has a significant impact on the running time
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
368
for data generation. Thus, we only generate 10,000
instances, of which 500 are kept for validation. The
model is trained separately on each dataset.
Different models are trained, each dedicated to
one of the following datasets: VRP10, VRP20 and
VRP50. The same hyperparameters are adopted for
all models, allowing a comparative analysis. We use
32 hidden units, 12 GCN layers, 3 MLP layers. The
model is trained by minimising the weighted cross-
entropy loss between the predicted edges and the
ground truth edges for each mini-batch. The loss
minimisation task is performed using the stochas-
tic gradient descent technique and Adam optimiser
(Kingma and Ba, 2015), with a learning rate of 0.001,
50 epochs and a batch size of 64. Each training
and validation dataset is divided into mini-batches of
64 instances. For each epoch of the training phase,
the model makes one pass through the entire training
dataset. Models are trained for 50 epochs. All compu-
tations are performed on the Nvidia T4 GPU provided
by the Google Colab platform.
4.3 Evaluation Procedure
At the end of each epoch of the training process, we
evaluate the performance of the model on the entire
validation set. The predicted edge adjacency matrix
is converted into a valid VRP tour using the standard
beam search strategy described in Section 3.3.1, with
a beam width of b = 10. The most likely of the candi-
date tours is selected. This approach encourages fast
evaluation while still allowing exploration among the
candidate tours to find the most likely tour.
To compare the quality of the tours found by the
model with those obtained by the OR-Tools solver, we
use the average optimality gap. Given the length l of
the predicted tour and the length
ˆ
l of the solver tour,
average optimality gap over m instances is:
1
m
m
∑
i=1
l
m
ˆ
l
m
− 1
(6)
For the final evaluation of the model, we use the
shortest tour heuristic (see Section 3.3.2) to convert
the edge adjacency matrix into valid VRP tour can-
didates, from which we select the shortest. This al-
lows us to sample routes from the b most likely can-
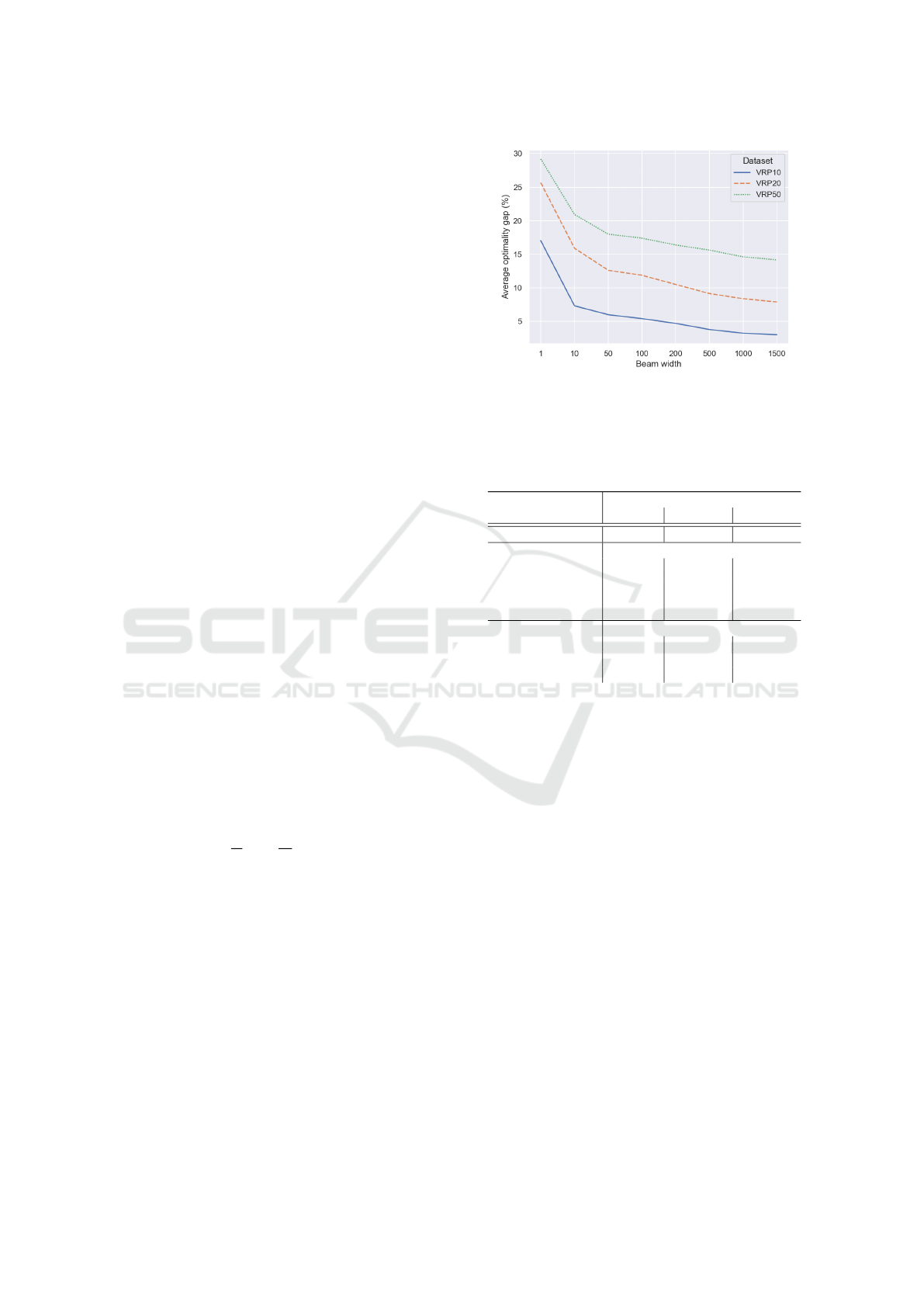
didates and select the best (shortest) ones. The size of
the beam width b creates a trade-off between execu-
tion time and solution quality. A larger beam width
explores more candidates at the expense of execu-
tion time, while a smaller beam width does the oppo-
site. Figure 2 shows the trade-off between beam width
and solution quality. For the beam width we choose
b = 1280, similar to the choice made by (Joshi et al.,
2019).
Figure 2: Trade-off between the beam width and the qual-
ity of the solution (average optimality gap) for different
datasets.
Table 1: Average optimality gap with respect to OR-Tools
for our model (GCN), the random baseline and the models
of Kool (Kool et al., 2019) and Duan (Duan et al., 2020).
Model
Validation set
VRP10 VRP20 VRP50
OR-Tools 0.00% 0.00% 0.00%
Beam search:
GCN 6.08% 16.06% 20.97%
Duan - -0.41% -2.42%
Kool (greedy) - -0.47% -2.90%
Random baseline 50.99% 105.38% 176.88%
Shortest tour:
GCN 3.28% 8.69% 16.12%
Duan - -0.46% -2.42%
Kool - -2.80% -6.10%
5 RESULTS
5.1 Average Optimality Gap Analysis
Table 1 shows the average optimality gap between the
model (GCN) and the OR-Tools solver evaluated on
all instances of the validation set. For comparison, we
include the average optimality gap obtained using the
standard beam search and shortest tour heuristic de-
coding strategies. We also include the random base-
line results, where we apply the standard beam search
to randomly generated edge probabilities. This com-
parison indicates of whether the model learns mean-
ingful representations for solving VRP instances.
Next, we include results reported by (Kool et al.,
2019) for the attention model and (Duan et al., 2020)
for the GCN node model. They test their models on
VRP20 and VRP50 datasets with instances generated
in a similar way. They do not report their optimality
gap with respect to OR tools.Also, their model does
not have a decoding approach similar to our standard
beam search strategy, so we present their greedy strat-
A Supervised Machine Learning Approach for the Vehicle Routing Problem
369
egy, which is similar to setting b = 1. Our model
clearly outperforms the random baseline by a factor
of about 10, indicating that the model has learned rep-
resentations that are useful for the decoding process.
Across all datasets, the shortest tour heuristic model
outperforms the standard beam search approach. This
is to be expected when sampling more solutions and
selecting the best among them. Second, our model
falls short when compared to the reinforcement learn-
ing approaches of (Kool et al., 2019) and (Duan et al.,
2020). These reinforcement learning models have the
advantage of generating VRP tours in an autoregres-
sive manner, making informed predictions about edge
connections at each decoding step. In contrast, the
non-autoregressive approach of the model generates
edge predictions one-shot, which may not account for
the capacity of the current partial tour.
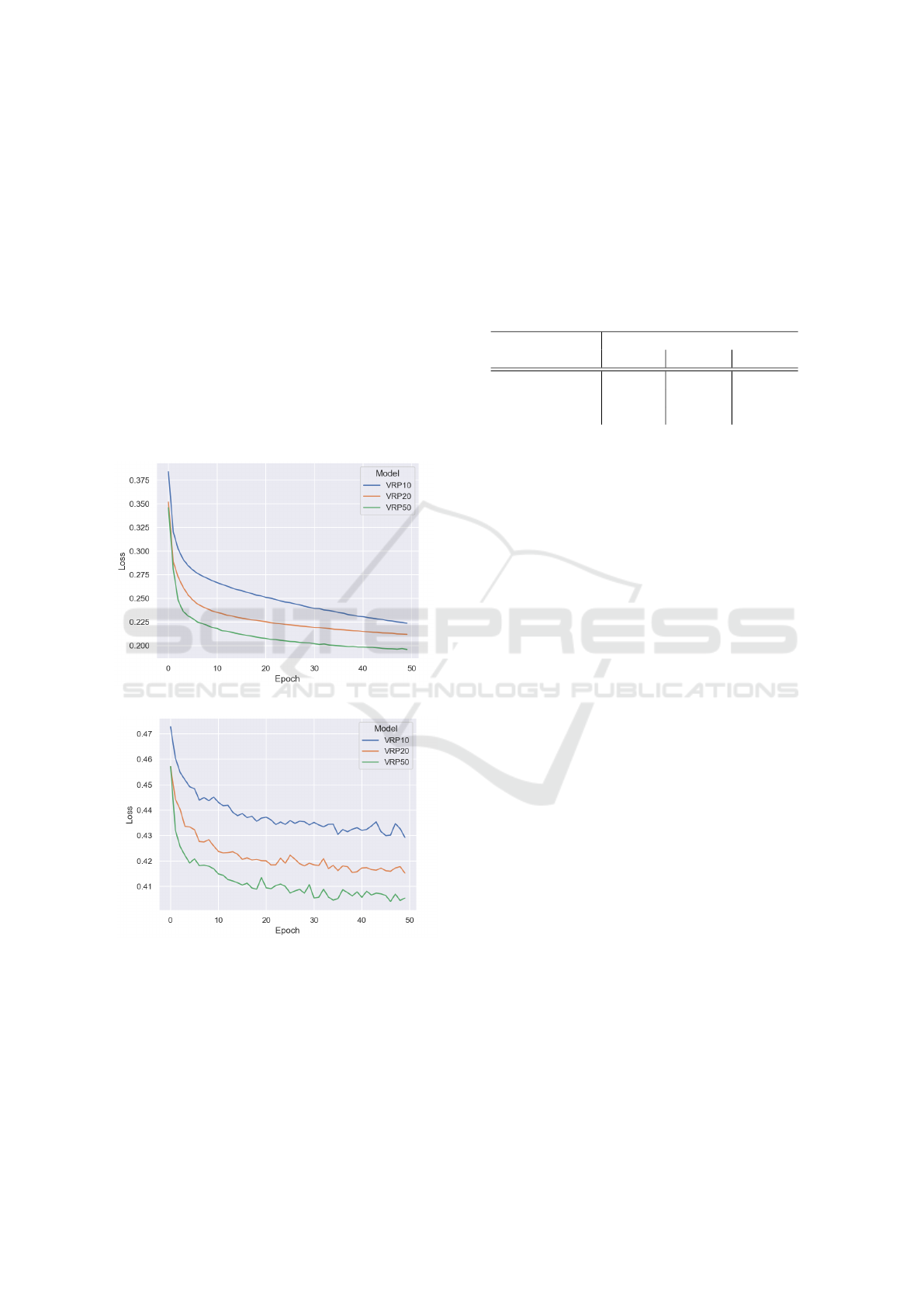
(a) Training loss.
(b) Validation loss.
Figure 3: Training and validation loss for each model over
50 epochs.
5.2 Training Progress and Loss Curves
Figure 3 shows the training progress of the mod-
els over 50 epochs. The training and validation
loss curves follow a similar trajectory, with a sharp
decrease initially and a steady decrease afterwards.
While the training loss follows a smoother path, the
validation loss becomes more irregular, but there’s no
evidence of overfitting. The relationship between val-
idation loss and average optimality gap is not straight-
forward, which is challenging for model evaluation
and interpretation.
Table 2: Average optimality gap per model trained and eval-
uated on different problem sizes.
Model
Validation set
VRP10 VRP20 VRP50
GCN (VRP10) 3.28% 18.97% 52.86%
GCN (VRP20) 6.57% 8.69% 28.70%
GCN (VRP50) 5.79% 16.00% 16.12%
5.3 Generalization of the Model
Table 2 explores the generalisation of the model to
different input sizes. Models trained on their respec-
tive datasets tend to outperform models generalizing
to different datasets. Models trained on more com-
plex problems seem to learn representations that are
beneficial when solving less complex problems. The
results suggest that models trained on less complex
problems may not scale well.
6 CONCLUSIONS
In this paper, we introduced a supervised ML ap-
proach for solving VRP, harnessing the power of
GCN. Our model effectively tackles VRP instances
with 10, 20, and 50 customer nodes, delivering
results that significantly surpass random baselines.
This success underscores our model’s capacity to ac-
quire the essential knowledge needed for problem-
solving. Nonetheless, reinforcement learning-based
autoregressive methods still outperform our approach.
Our model faces limitations when it comes to lever-
aging prior information for making informed predic-
tions, especially regarding the edges. This becomes
particularly critical in the context of VRP, where con-
sidering vehicle capacity is essential for valid routes.
While SL methods hold promising results, practi-
cal challenges arise. Large amounts of training data
are required, especially for larger and more complex
VRP problem instances. Generating such data de-
mands significant time and resources, which increases
with problem complexity increases. Finally, we indi-
rectly demonstrated the expressive power of GNNs by
extending the model architecture for TSP to support
VRP. This shows that there is much potential for us-
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
370

ing GNNs to solve combinatorial optimisation prob-
lems. In order to improve model performance, future
work can focus on different decoding strategies which
are more appropriate the VRP problem complexity by
using an autoregressive decoder.
REFERENCES
Archetti, C., Feillet, D., Gendreau, M., and Speranza, M. G.
(2011). Complexity of the VRP and SDVRP. Trans-
portation Research Part C: Emerging Technologies,
19(5):741–750.
Bai, R. et al. (2023). Analytics and machine learning in ve-
hicle routing research. International Journal of Pro-
duction Research, 61(1):4–30.
Bello, I., Pham, H., Le, Q. V., Norouzi, M., and Bengio,
S. (2017). Neural Combinatorial Optimization with
Reinforcement Learning. arXiv:1611.09940.
Bogyrbayeva, A., Meraliyev, M., Mustakhov, T., and
Dauletbayev, B. (2022). Learning to Solve Vehicle
Routing Problems: A Survey. arXiv:2205.02453.
Clarke, G. and Wright, J. W. (1964). Scheduling of Vehicles
from a Central Depot to a Number of Delivery Points.
Operations Research, 12(4):568–581.
Deudon, M. et al. (2018). Learning Heuristics for the TSP
by Policy Gradient. In Integration of Constraint Pro-
gramming, Artificial Intelligence, and Operations Re-
search, volume 10848, pages 170–181. Springer In-
ternational Publishing, Cham.
Duan, L. et al. (2020). Efficiently Solving the Practical Ve-
hicle Routing Problem: A Novel Joint Learning Ap-
proach. In Proceedings of the 26th ACM SIGKDD
International Conference on Knowledge Discovery &
Data Mining, pages 3054–3063, Virtual Event CA
USA. ACM.
Fu, Z.-H., Qiu, K.-B., and Zha, H. (2021). Generalize a
Small Pre-trained Model to Arbitrarily Large TSP In-
stances. Proceedings of the AAAI Conference on Arti-
ficial Intelligence, 35(8):7474–7482.
Hamilton, W. L. (2020). Graph representation learning.
Morgan & Claypool Publishers.
Hillyer, M. (2020). Urban Deliveries Expected to Add
11 Minutes to Daily Commute and Increase Carbon
Emissions by 30% until 2030 without Effective Inter-
vention by Press releases World Economic Forum.
Hopfield, J. J. and Tank, D. W. (1985). “Neural” computa-
tion of decisions in optimization problems. Biological
Cybernetics, 52(3):141–152.
Hottung, A. and Tierney, K. (2020). Neural Large Neigh-
borhood Search for the Capacitated Vehicle Routing
Problem. Frontiers in Artificial Intelligence and Ap-
plications, 325 ECAI 2020:443–450.
Ioffe, S. and Szegedy, C. (2015). Batch normalization: Ac-
celerating deep network training by reducing internal
covariate shift. In International conference on ma-
chine learning, pages 448–456. pmlr.
Joshi, C. K., Laurent, T., and Bresson, X. (2019). An Ef-
ficient Graph Convolutional Network Technique for
the Travelling Salesman Problem. In INFORMS An-
nual Meeting 2019, Session on Boosting Combinato-
rial Optimization using Machine Learning.
Khalil, E., Dai, H., Zhang, Y., Dilkina, B., and Song, L.
(2017). Learning combinatorial optimization algo-
rithms over graphs. Advances in neural information
processing systems, 30.
Kingma, D. P. and Ba, J. (2015). Adam: A method for
stochastic optimization. In International Conference
on Learning Representations.
Konstantakopoulos, G. D., Gayialis, S. P., and Kechagias,
E. P. (2020). Vehicle routing problem and related al-
gorithms for logistics distribution: A literature review
and classification. Operational research, pages 1–30.
Kool, W. et al. (2022). Deep Policy Dynamic Program-
ming for Vehicle Routing Problems. In Integration of
Constraint Programming, Artificial Intelligence, and
Operations Research, volume 13292, pages 190–213.
Springer International Publishing, Cham.
Kool, W., van Hoof, H., and Welling, M. (2019). Attention,
Learn to Solve Routing Problems! In International
Conference on Learning Representations (ICLR).
Li, S., Yan, Z., and Wu, C. (2021). Learning to delegate
for large-scale vehicle routing. Advances in Neural
Information Processing Systems, 34:26198–26211.
Medress, M. F. et al. (1977). Speech understanding systems:
Report of a steering committee. Artificial Intelligence,
9(3):307–316.
Nazari, M. et al. (2018). Reinforcement learning for solv-
ing the vehicle routing problem. Advances in neural
information processing systems, 31.
Nowak, A., Villar, S., Bandeira, A. S., and Bruna, J. (2017).
A Note on Learning Algorithms for Quadratic Assign-
ment with Graph Neural Networks. Proceedings of the
34th International Conference on Machine Learning.
Peng, B., Wang, J., and Zhang, Z. (2020). A deep rein-
forcement learning algorithm using dynamic attention
model for vehicle routing problems. In Artificial In-
telligence Algorithms and Applications: 11th Interna-
tional Symposium, ISICA 2019, Guangzhou, China,
pages 636–650. Springer.
Perron, L. and Furnon, V. (2023). OR-Tools.
Prates, M. et al. (2019). Learning to Solve NP-Complete
Problems: A Graph Neural Network for Decision
TSP. Proceedings of the AAAI Conference on Arti-
ficial Intelligence, 33(01):4731–4738.
Smith, K. A. (1999). Neural Networks for Combinato-
rial Optimization: A Review of More Than a Decade
of Research. INFORMS Journal on Computing,
11(1):15–34.
Vinyals, O., Fortunato, M., and Jaitly, N. (2015). Pointer
networks. Advances in neural information processing
systems, 28.
Voudouris, C., Tsang, E. P., and Alsheddy, A. (2010).
Guided local search. In Handbook of metaheuristics,
pages 321–361. Springer.
A Supervised Machine Learning Approach for the Vehicle Routing Problem
371
