
Enhanced Segmentation of Deformed Waste Objects in Cluttered
Environments
Muhammad Ali
a
, Omar Alsuwaidi and Salman Khan
b
Muhammad Bin Zayed University of Artificial Intelligence, U.A.E.
{firstname.lastname}@mbzuai.ac.ae
Keywords:
Segmentation, Multi Scale Feed Forward Network(MSFN), Dilation, FreezeConnect, Weighted Learning.
Abstract:
Recycling is a crucial process for mitigating environmental pollution; however, due to inefficiencies in waste
sorting, a significant portion of recyclable waste is being underutilized. The complexity and disorganization
of waste streams make it challenging to efficiently separate recyclable materials. Identifying recyclable items
in cluttered environments requires the recognition of highly deformable objects by computer vision systems.
To this end, we propose a computer vision-based approach capable of efficiently separating recyclable ma-
terials from waste, even in disorganized settings, by recognizing highly deformable objects. We extend an
existing large-scale CNN-based model, the InternImage, by introducing Mutli-scale networks and combining
cross-entropy and dice loss for improved segmentation. Our focus is on enhancing the segmentation of the
ZeroWaste-f dataset, an industrial-grade dataset for waste detection and segmentation. We further propose a
unique Mutli-scale feed-forward network configuration and integrate it with the InternImage architecture to
effectively model Multi-scale information on the challenging ZeroWaste-f dataset for both waste detection
and segmentation tasks. This improvement is further enhanced by introducing a novel Freezeconnect module
which helps to counteract neuron co-adaptation during training by redistributing the learning (gradient signal)
across the network. We compare our model with existing state-of-the-art baseline methods on ZeroWaste-f
and TrashCAN datasets to demonstrate the effectiveness of our method.
1 INTRODUCTION
Despite employing a combination of machinery and
manual labor, Materials Recovery Facilities(MRFs)
currently suffer from unsatisfactory recycling rates
and profit margins (Gundupalli et al., 2017). For in-
stance, in 2018, the United States recycled less than
35% of its recyclable waste. In addition to efficiency
concerns, worker safety is a paramount issue in man-
ual waste sorting, as workers are routinely exposed to
hazardous and unsanitary items, such as knives and
medical needles. Moreover, the highly cluttered na-
ture of waste streams poses a substantial obstacle in
achieving automated waste detection, which entails
identifying waste objects for removal from conveyor
belts (Bashkirova et al., 2021).
Current progress in object classification and seg-
mentation offers promising opportunities to enhance
the efficiency and safety of the recycling process.
Traditional CNN-based approaches in semantic seg-
mentation primarily utilize local, short-range struc-
a
https://orcid.org/0000-0001-9320-2282
b
https://orcid.org/0000-0002-9502-1749
tures within images to understand their semantics, as
noted in studies (Chen et al., 2017). However, their
fixed geometric structures inherently restrict them
to capturing only short-range context. To address
this limitation, various methods like dilated convo-
lution (Wu et al., 2019; Wu et al., 2019) and chan-
nel/spatial attention models (Huang et al., 2022) have
been explored. The introduction of vision transform-
ers (Dosovitskiy et al., 2020), which leverage self-
attention mechanisms, has significantly transformed
the landscape of semantic segmentation. However,
these models require additional effort to achieve bet-
ter performance when segmenting objects in a clut-
tered background. Therefore, it’s important to ad-
dress the challenges posed by background clutter,
which can hinder the model’s ability to focus on in-
dividual objects. On top of it various scale diver-
sity also presents difficulty in capturing small ob-
jects. In light of these challenges, our research is
focused on improving waste segmentation in com-
plex environments, aiming to advance the recovery
of recyclable materials from the current rate of 35%
(Kaza et al., 2018). We developed a novel mixed-
570
Ali, M., Alsuwaidi, O. and Khan, S.
Enhanced Segmentation of Deformed Waste Objects in Cluttered Environments.
DOI: 10.5220/0012424900003654
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2024), pages 570-581
ISBN: 978-989-758-684-2; ISSN: 2184-4313
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

scale block configuration specifically designed for
the effective segmentation of waste in cluttered en-
vironments. To benchmark our model effectively
against relevant datasets, we selected the ZeroWaste-
f dataset. The choice is motivated by the limita-
tions of existing open-source datasets, which often
comprise limited data or are produced in controlled,
clean settings. Such datasets do not adequately cap-
ture the complexities and variabilities encountered in
real-world waste sorting environments. While there
are existing datasets like TrashCan 1.0 (Hong et al.,
2020), Trash-ICRA19 (Fulton et al., 2020; Hong
et al., 2020), and TACO (Proenc¸a and Sim
˜
oes, 2020),
used for segmentation tasks, they fall short in repre-
senting the challenging and cluttered conditions typi-
cal in waste management scenarios. The ZeroWaste-f
dataset (Bashkirova et al., 2021), with its more realis-
tic and diverse samples, offers a more suitable bench-
mark for evaluating our model’s performance in prac-
tical applications Our main contributions can be sum-
marized as following.
• Our newly designed basic block integrates so-
phisticated elements, including Layer Normal-
ization (LN), Multi-Scale Feedforward Network
(MSFN), and GELU activation. This combination
has proven to be highly effective in various visual
processing tasks, showcasing the strength of our
approach in advancing visual task performance.
• Subsequently, we introduce a multi-scale feed-
forward network to design a novel convolutional
backbone network. By processing inputs at mul-
tiple scales, the network can effectively segment
smaller, finer details as well as larger objects, cru-
cial for accurate waste segmentation in complex
scenes.
• We further introduce an innovative freeze-connect
trick to retain learning. It ensures the robust-
ness of the model by preserving the integrity of
neural activity and redistributing the gradient sig-
nal, which is vital for learning intricate patterns in
cluttered environments.
• We additionally introduce dilation the stem layer
of the model. In cluttered waste environments, di-
lated convolutions help in capturing broader con-
text, allowing the model to better understand spa-
tial relationships between waste objects and their
surroundings
• Moreover, we effectively learn better representa-
tions by employing weighted learning with cross-
entropy (Mao et al., 2023) and Dice loss (Sudre
et al., 2017). These combinations facilitate bet-
ter approximations for CNNs with extended-range
dependencies and adaptive spatial aggregation us-
ing an improved 3x3 DCN operator.
By combining these techniques, the model is
equipped to handle the diverse challenges presented
by waste segmentation in intricate scenes including
variability in object size and shape to the prevention
of overfitting and the need for adaptability to irregu-
lar forms. Finally, we evaluate our proposed model
on pertinent vision tasks, such as semantic segmenta-
tion as well as detection and got improved mIoU and
accuracy as given in the results section against Zero
Waste and TrashCAN dataset.
2 RELATED WORK
In recent years, state-of-the-art performance in rec-
ognizing general object classes from natural scene
images has been achieved by semantic segmentation
models, such as Mask R-CNN (He et al., 2017) and
DeepLabv3 (Chen et al., 2017). These models effec-
tively localize objects within images while simulta-
neously generating high-quality segmentation masks,
facilitating efficient interaction between robots and
target objects (”Minaee et al., 2021). However, these
models’ data-hungry nature necessitates large vol-
umes of annotated data for training, which can be
both challenging and costly in specialized application
scenarios. Waste recycling annotation, in particular,
demands expert labelers and incurs even higher costs
due to the complexity of the environments involved.
Semi-supervised segmentation methods have been
proposed to address the limitations of fully-
supervised methods by concurrently learning from
both annotated and unannotated images. For exam-
ple, ReCo (Liu et al., 2021a) introduces an unsuper-
vised loss to optimize intra-class and inter-class vari-
ance of pixels, resulting in improved segmentation
performance. On the other hand, weakly-supervised
methods utilize more readily available annotations,
such as image-level tags, and employ Class Activa-
tion Maps (CAM) (Jung and Oh, 2021) to identify
the most discriminative regions. These regions are
then used as pixel-level supervision for segmentation
networks. PuzzleCAM (Jo and Yu, 2021) improves
the quality of CAMs without adding layers by ensur-
ing consistency between partial and full features. Al-
though advanced segmentation models have been de-
veloped, their application to cluttered real-world sce-
narios presents challenges, such as domain shift and
poor generalization. Also To address the transformer-
based architecture’s issue of high computational com-
plexity and memory requirement (Dosovitskiy et al.,
2021), several methods have been proposed. PVT
Enhanced Segmentation of Deformed Waste Objects in Cluttered Environments
571

(Wang et al., 2021; Bello et al., 2020) and Linformer
(Wang et al., 2020) perform global attention on the
downsampled key and value maps, respectively. DAT
(Pathak et al., 2015) employs deformable attention to
sparsely sample information from value maps, while
HaloNet (Vaswani et al., 2021) and Swin transformer
(Liu et al., 2021b) rely on local attention mecha-
nisms and utilize haloing and shift operations for in-
formation exchange among neighboring local areas.
These methods aim to improve the computational ef-
ficiency of global attention in transformer-based mod-
els, enabling their application in more challenging
downstream tasks. After the availability of large-
scale datasets and computational resources, convolu-
tional neural networks (CNNs) became mainstream
for visual recognition. Several deeper and more effec-
tive neural network architectures have been proposed
since AlexNet (Krizhevsky et al., 2012), including
VGG (Simonyan and Zisserman, 2014), GoogleNet
(Szegedy et al., 2015), ResNet (He et al., 2016),
ResNeXt (Xie et al., 2017), and EfficientNet (Tan
and Le, 2019). Modern CNNs (Zhai et al., 2022)
have shown promising performance on vision tasks
by adopting advanced designs and logic of trans-
formers such as incorporating the self-attention mech-
anism. They discover better components through
macro/micro designs and introduce improved con-
volutions with long-range dependencies along with
adaptive spatial aggregation techniques. In our study,
we build upon the findings of Wenhai Wang et al.
(Wang et al., 2022b), which demonstrated the effec-
tiveness of large-scale CNN-based models. convolu-
tion v2 (DCNv2) (Zhu et al., 2019) we provide exper-
imental results using our ZeroWaste-f dataset. While
the previous research emphasize scale diversity (Za-
mir et al., 2021) in image restoration, our unique
contribution introduces a novel multiscale module for
segmentation enhancement. Incorporating a multi-
scale feed-forward network is paramount to address-
ing the specific challenges posed by our dataset,
which involves highly deformed shapes in cluttered
environments. By integrating this network architec-
ture into our model, we anticipate achieving improved
results and better adaptability to the complexities pre-
sented by the data.
3 METHODOLOGY
Our methodology is inspired by the current state-of-
the-art vision model InternImage (Wang et al., 2023;
Zamir et al., 2021) using UperNet(Xiao et al., 2018),
which is a versatile model used for various computer
vision tasks. Our goal is to tailor it towards segmenta-
tion tasks specifically and evaluate its performance on
our dataset while benchmarking against the original
model. Initially, we adjust the model’s hyperparame-
ters accordingly to optimize results, while also intro-
ducing a Mutli-scale feed-forward network (FFN) that
enhances the model’s ability to handle Mutli-scale ob-
ject settings. We also incorporate a relatively large
dilated convolution kernel in the stem layer to cap-
ture more spatially aware representations across mul-
tiple channels and aggregate information from an ex-
panded receptive field, generating rich feature maps.
Furthermore, we employ a combination of two
different loss functions, cross-entropy (CE) and Dice
(Sudre et al., 2017), to drive the model’s training pro-
cess. This implementation propagates a stronger gra-
dient signal throughout the giant network, improving
the learning process. Our integration of the MSFN,
dilated layers, and combined loss function constitutes
substantial and novel contributions that significantly
enhance the segmentation model’s performance. We
demonstrated these enhancements through compre-
hensive evaluations, showcasing their effectiveness.
We firmly believe that our work represents a notable
advancement in the field of image segmentation, of-
fering valuable insights and improved results for vari-
ous applications. In Sections 3.3, 3.2 and 3.4 we pro-
vide further elaboration on the model’s main building
blocks and modifications, which have been tailored
specifically for segmentation tasks in cluttered envi-
ronments, such as those commonly encountered with
waste objects.
3.1 Basic Block
Our proposed block incorporates advanced compo-
nents such as Layer Normalization (LN), Multi-Scale
Feedforward Network (MSFN), and GELU activa-
tion, it demonstrates effectiveness across a range of
visual tasks (Wang et al., 2021). Additionally, it uti-
lizes separable 3x3 depth-wise convolutional kernels
followed by a linear projection to estimate the sam-
pling offsets and modulation scales of deformable
convolutions. We use the idea of separable convolu-
tions to predict the sampling offsets and modulation
scales of deformable convolutions. We show our main
block as a Multi-Scale block where core operator is
DCNv3 and then input features are passed through
LN and then pass through Multi-scale feed-forward
network as illustrated in Figure 1. Design and the
composition of this block as in Figure 1 will be de-
scribed in sections 3.2 to 3.5.
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
572

3.2 Multi Scale Feed Forward Network
Here, we propose deploying a Multi-Scale Feedfor-
ward Network (MSFN), which addresses the issue
of single-scale convolutions used in previous imple-
mentations by combining information from multiple
scales to improve the model’s robustness against oc-
clusions and viewpoint changes. The MSFN includes
two Mutli-scale depth-wise convolution paths in the
transmission process, taking into account the correla-
tions of Mutli-scale feature maps. After Layer Nor-
malization and channel dimension expansion using a
1x1 convolution, the processed input is fed into two
parallel branches that employ 3x3 and 5x5 depth-wise
convolutions each, enhancing the extraction of Mutli-
scale local information. This feature fusion procedure
within the MSFN is designed to better integrate the
short-range and long-range dependencies, improving
the model’s overall segmentation performance. The
motivation behind using the MSFN is to enhance the
model’s segmentation ability to capture both local
details and global context, allowing the incorpora-
tion of local feature extraction and fusion at differ-
ent scales. By effectively fusing features at multiple
scales, the MSFN optimizes the trade-off between lo-
cal and global information, leading to improved seg-
mentation accuracy and performance on a variety of
images with diverse object scales and complexities. A
diagram illustrating the MSFN can be seen in Figure
1. The MSFN layer can be modeled as:
X
′
= f
1×1
(LN(X))
X
A
= σ( f
3×3
(X
′
))
X
B
= σ( f
5×5
(X
′
))
ˆ
X
A
= σ( f
3×3
[X
A
, X
B
])
ˆ
X
B
= σ( f
5×5
[X
A
, X
B
])
X = σ( f
1×1
[
ˆ
X
A
,
ˆ
X
B
]) + X (1)
where f
1×1
is 1 × 1 convolution while f
3×3
and
f
5×5
are depthwise convolution whereas sigma is the
GELU activation function. Eq.(1) describes the out-
put signal after MSFN block.
3.3 Stem Layer with Dilation
The stem layer is a critical component of the model,
designed to perform preliminary feature extraction
from the input image and generate pertinent feature
maps for downstream tasks. The prepared input data
is then processed by subsequent deformable convo-
lutions, which help the network learn spatial trans-
formations and more complex patterns in the images.
Since segmenting a cluttered scene depends on multi-
ple spatial cues and requires long-range dependence,
we propose augmenting the stem layer by incorporat-
ing a large dilated convolutional kernel. By adding
the dilated convolutional kernel to the stem layer, we
achieve better performance in our semantic segmenta-
tion tasks. Our experiments empirically demonstrate
that this modification helps capture global details and
larger context in the input images, leading to more ac-
curate and robust predictions.
The stem layer comprises 3x3 convolutions with a
stride of two, followed by Layer Normalization (LN),
essentially acting as an improved downsampling layer
through the use of an adaptive spatial aggregation
technique. The specific components of the stem layer
are detailed in Figure 1. Overall, the stem layer con-
sists of two regular convolutional layers with interme-
diate normalization and activation layers. Addition-
ally, a dilated convolutional layer is added after the
second convolutional layer to capture context infor-
mation with a larger receptive field.
3.4 Cross-Entropy + Dice Loss
To further enhance the segmentation performance, we
used a weighted combination of cross-entropy loss
and Dice loss. Dice loss enhances object localization
by measuring overlap between predicted and ground
truth masks, improving fine detail capture compared
to Cross-Entropy loss. The weighted loss, represented
by L, is composed of the cross-entropy loss, L
CE
, and
the Dice loss, L
D
. By combining both cross-entropy
and Dice losses, our model achieved better results
compared to using only cross-entropy or Dice loss in-
dividually. The combined loss L can be formulated as
such:
L = L
CE
+ αL
D
(2)
To optimize our approach for aligned representation
learning, we experimented with different weight com-
binations. After evaluating several options, we found
that assigning a weight of α = 0.2 to L
D
provides us
with the best results as given in Eq.(2). The α vs IoU
effects are given in the Appendix in Figure 1.
3.5 Freezeconnect
In the pursuit of addressing overfitting in deep learn-
ing models, we introduce a novel regularization tech-
nique called Freezeconnect. This approach as in Fig-
ure 3 contrasts with conventional methods such as
Dropout, where neurons are randomly dropped during
the forward pass, potentially disrupting the neural ac-
tivity within the network Unlike Dropout, Freezecon-
nect preserves the overall output signal by not drop-
ping any neurons. Freeze connect maintains the in-
tegrity of the neural activity within the network, cru-
Enhanced Segmentation of Deformed Waste Objects in Cluttered Environments
573
StemLayer
DownSampling
DownSampling
MixedScaleStage1
MixedScaleStage2
MixedScaleStage3
Conv2D
GELU
LN
Conv2D
DilatedConv2D
LN
DCN-V3
LN
1x1
1x1
Relu
5x5 Dw Conv
3x3 Dw Conv
Relu
5x5 Dw Conv
3x3 Dw Conv
Relu
Relu
1x1
Conv2D
LN
c
c
c
+
c
Concat
Addition
+
X
B
X
A
X
⌃
A
X
⌃
B
X
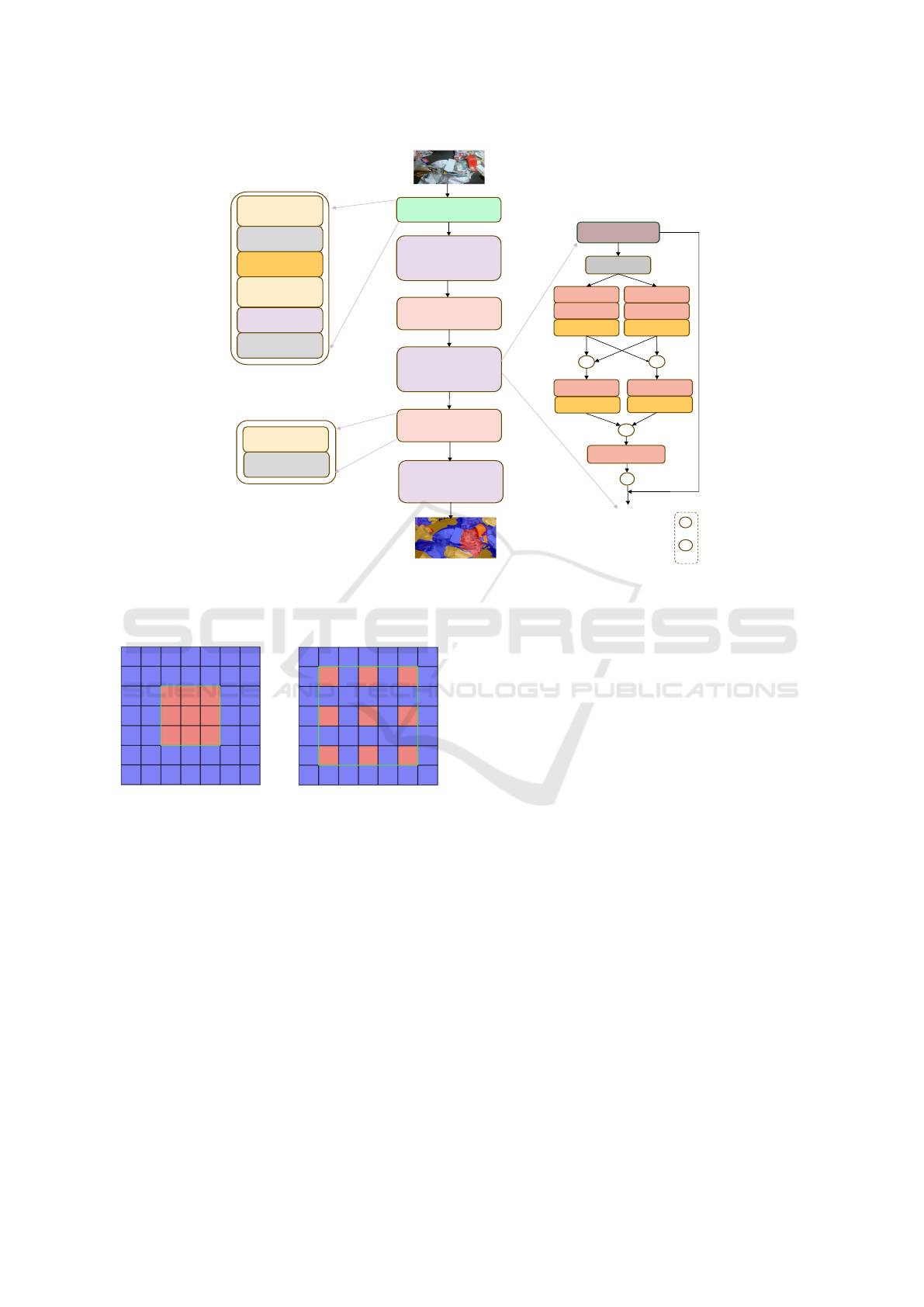
Figure 1: The overall architecture of our proposed model, primarily comprising the Sampling Layer, Convolution Layer, and
Multi-Scale Feed-Forward Network (MFFN). ’LN’ denotes Layer Normalization, while ’DW-Conv’ stands for Depth-Wise
Convolution. Each architectural modification is further elaborated in the respective sections detailing the individual blocks.
(a) Normal Conv2D (b) Dilated Conv, rate 2
Figure 2: An illustration of dilated convolution, showcasing
the influence of the dilation rate on the effective receptive
field. We utilize a dilation rate of 2 to facilitate the model’s
capability to capture more comprehensive spatial informa-
tion from an extended receptive field.
cial for accurately identifying and segmenting waste
in complex, cluttered environments where every neu-
ral connection can be vital for recognizing subtle dif-
ferences. Instead, this method operates during the
backward pass of the network, subtly modifying the
main gradient signal flowing through each neuron.
Specifically, branches of the gradient signal are ran-
domly zeroed out based on a probability parame-
ter p, and the remaining non-zeroed gradient signal
branches are amplified in proportion to this probabil-
ity. On one hand, it retains the integrity of the model’s
output signal to the response variable, ensuring that
neural activity remains uninterrupted. On the other
hand, it simultaneously acts as a regularizer, redis-
tributing the gradient signal across the entire network.
The core motivation to use Freezeconnect resides in
its capacity to mitigate model overfitting in a gentle
manner without altering the overall architecture of the
network. By redistributing the gradient signal across
the network without altering its overall architecture,
Freezeconnect effectively reduces the risk of overfit-
ting, ensuring that the model generalizes well to new,
unseen cluttered environments, which is essential for
the dynamic and varied nature of waste segmentation
tasks. Experimental results, as detailed in subsequent
sections, underscore the effectiveness of Freezecon-
nect in enhancing model robustness and performance,
thereby positioning it as a valuable contribution
4 EXPERIMENTATION
To evaluate our model, we conduct extensive experi-
ments on the ZeroWaste-f dataset and report metrics
such as mean Intersection over Union (mIoU) and
pixel accuracy for comparison with previous works
on the same dataset. Additionally, we compare our
results with those achieved by SOTA models on the
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
574

Figure 3: Freezeconnect randomly zeroes out branches of
the gradient signal and amplifies the remaining branches.
Each circle represents a neuron and solid lines indicate for-
ward signal paths. Dotted lines denote selectively nullified
gradients during backpropagation, emphasizing the regular-
ization effect of the Freezeconnect approach in contrast to
Dropout.
same dataset, including the DeepLabv3. Our pro-
posed model outperforms all of these models on the
ZeroWaste-f dataset, achieving a new state-of-the-art
performance with a mIoU of 53.95 as well as an ac-
curacy of 91.30. These results demonstrate the ef-
fectiveness of our approach for accurate and efficient
segmentation as well as detection of waste materials
in the ZeroWaste-f dataset. We further validate our re-
sults on the TrashCAN dataset. We first define setups
requirement and detailed results are given in section
5.
4.1 Segmentation Task - Setup
Our proposed model is specifically designed for the
task of semantic segmentation, which involves la-
beling each pixel in an image with its correspond-
ing class or category. We use the open-source tool-
box MMSegmentation (Contributors, 2020). We train
the model using the UperNet framework (Xiao et al.,
2018), initializing the backbone with pre-trained clas-
sification weights from the ImageNet (Deng et al.,
2009) dataset. The model is trained for 120k it-
erations on the ZeroWaste-f dataset, employing the
AdamW optimizer (Kingma and Ba, 2017) with an
initial learning rate set at 6 × 10
−5
. In accordance
with established research protocols, we implement a
learning rate decay schedule characterized by a poly-
nomial decay strategy featuring a power exponent of
1.0 and set the crop size to 512 and the batch size to 16
for training. To evaluate the model’s performance, we
utilize the ZeroWaste-f as well as TrashCAN datasets.
Further details in Section 5
4.2 Detection Task - Setup
To gear our model towards objection detection task
and following established practices (Liu et al., 2021b;
Wang et al., 2022c), we validate the performance of
our model on top of the MaskRCNN framework. We
initialize the backbone with pre-trained classification
weights from ImageNet and trained our models for
120k iterations with default settings. This initializa-
tion provides an effective starting point for our detec-
tion models. Section 5.3 provides further detail. We
benchmarked our method against both the ZeroWaste-
f and TrashCAN datasets
5 RESULTS
Our primary focus is on segmentation, which we also
extend to the task of object detection. In the follow-
ing sections, we present a comprehensive analysis of
the results obtained from our proposed approach in
contrast to the baseline performance of the InternIm-
age mode. Table 1 presents an ablation study, show-
casing the improved contribution impact of different
individual and grouped modules on the end result.
Meanwhile, Table 2 provides a per-class comparison
of the IoU metric, where our model demonstrates su-
perior segmentation results across all classes, includ-
ing those representing more complex waste shapes.
5.1 Ablation Study
The adoption of a combined loss function in our
model enabled us to concurrently optimize the bal-
ance between two key objectives: maximizing the
overlap between the predicted and ground truth seg-
mentation masks, represented by the Dice loss, and
minimizing the divergence in probability distributions
between the predicted and true labels, as indicated
by the Cross-Entropy (CE) loss. This dual-focus ap-
proach led to a substantial enhancement in model
performance. Specifically, when compared to using
either loss independently, the combination of both
losses resulted in a 1.03% improvement in the mIoU
(mean Intersection over Union) value, as shown in Ta-
ble 1.
Furthermore, the incorporation of dilated convo-
lution layers led to higher accuracies in our results,
as demonstrated in Tables 1 and 2. Specifically, the
segmentation accuracy increased by 0.35% compared
to the baseline, indicating the model’s enhanced abil-
ity to differentiate and recognize subtle discrepancies
among various classes of waste. Further, the imple-
mentation of Freezeconnect’s regularization allowed
the model to redistribute its gradient signal across
different pathways, leading to more uniform learning
throughout the network. This potential innovation in
optimization landscapes contributed to improved gen-
Enhanced Segmentation of Deformed Waste Objects in Cluttered Environments
575

Table 1: Ablation Table demonstrating the incremental impact of module additions on model performance with the ZeroWaste-
f Dataset.
Dil. Conv CE+DICE FConnect MSFN mIoU Acc
- - - - 45.61 83.36
✓ - - - 45.96 86.02
✓ ✓ - - 46.64 86.05
✓ ✓ ✓ - 47.60 86.84
- ✓ - ✓ 51.05 |87.45
✓ ✓ ✓ ✓ 52.80 91.63
eralization, as evidenced by an almost 1% improve-
ment when added, as depicted in Table 1. The Mul-
tiscale Feed-forward Network (MSFN) architecture
was designed with a focus on efficiency and effective-
ness, making it a versatile solution for various com-
puter vision applications. It yielded significantly im-
proved results, with a performance enhancement of
3.45% in the mIoU value over the previous values
(Table 1). We also present the model’s confusion ma-
trix in Figure 4, emphasizing the significantly higher
prediction accuracy achieved for the soft plastic and
metal classes compared to the other two classes.
5.2 Semantic Segmentation Task
As depicted in Table 3, for the task of semantic
segmentation, our proposed model consistently out-
performs the previously established state-of-the-art
model on the ZeroWaste-f dataset (Liu et al., 2021b).
Our model achieves the highest Intersection over
Union (IoU) of 53.95 on the ZeroWaste-f Dataset,
as shown in Table 3. The IoU is a key metric in
evaluating the quality of segmentation, measuring the
overlap between the predicted segmentation and the
ground truth. This high IoU score demonstrates the
precise segmentation capabilities of our model. Fig-
ure 5 presents a few sample results, while additional
examples can be found in the Appendix.
While transformer-based models have emerged in
recent works (Liu et al., 2022b), our results pro-
vide further evidence supporting the continued rel-
evance and effectiveness of CNN-based models in
vision tasks. This is particularly pronounced when
dealing with smaller-sized datasets, where our CNN-
based model has shown superior performance. The
success of our model in handling such data limitations
underscores the robustness of CNNs in tackling real-
world vision tasks, even in scenarios with restricted
training samples.
Per Class Comparison
In our comprehensive analysis, we evaluated the im-
pact of incorporating various modules on the per-
formance of our model using per-class metrics as
given in Table 1. The results showed consistent im-
provements for all classes. Introducing the Multi-
Scale Feature Network (MSFN) led to significant in-
creases in Intersection over Union (IoU) scores for
most classes, indicating improved segmentation ac-
curacy. We observed promising outcomes for soft-
plastic, which is typically challenging to predict or
segment due to its transparent nature. Addition-
ally, we noted improved results for rigid plastic and
metal, owing to the distinct characteristics of their
compositions. However, the cardboard class exhib-
ited a different behavior. This can be attributed to
the nature of cardboard shapes in the dataset, which
are less deformed compared to other classes, making
the MSFN’s contribution relatively less pronounced.
Nevertheless, it is important to note that the IoU for
the cardboard class did increase, highlighting the pos-
itive impact of the MSFN on segmentation results, al-
beit to a lesser extent than for classes with more de-
formed shapes. Also metal and cardboard are less in
numbers as compared to the other two classes.
Our findings underscore the varying influence of
the MSFN on segmentation performance across dif-
ferent classes, with the level of deformation in ob-
jects playing a crucial role in determining the extent
of improvement. These insights hold significant po-
tential for optimizing segmentation models and cus-
tomizing them to the specific characteristics of indi-
vidual classes.
Figure 4: The confusion matrix of our model’s semantic
segmentation performance on the ZeroWaste-f dataset.
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
576
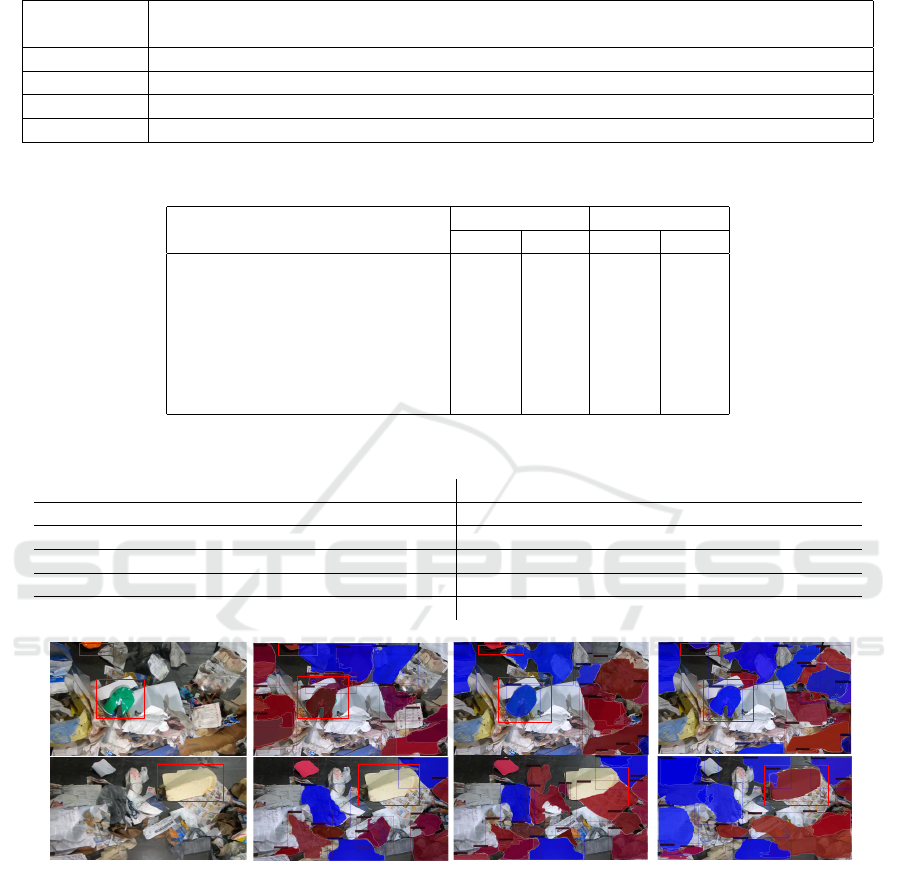
Table 2: A comparison of individual classes from the ZeroWaste-f dataset against the hierarchical stacking of different model
modules.
Class Baseline
IoU
(CE+Dice)
IoU
(Prev.+ Dilated Conv)
IoU
(Prev.+ MSFN)
IoU
(Prev.+ F.Connect)
Rigid Plastic 27.58 27.72 28.06 30.67 34.88
Soft Plastic 61.86 70.16 71.65 84.88 88.47
Cardboard 51.36 80.93 88.83 89.47 92.12
Metal 3.41 4.5 4.64 5.83 10.88
Table 3: Segmentation results on the validation and test sets of ZeroWaste-f dataset.
Validation Test
Methods mIoU Acc mIoU Acc
EPS(Lee et al., 2021) 13.75 59.96 13.91 60.65
CCT(Ouali et al., 2020) 30.79 84.80 29.32 85.91
Deeplab(Chen et al., 2016) 46.0 87.0 52.30 84.79
ReCo(Liu et al., 2022a) 49.49 89.58 44.12 88.36
InternImage(Wang et al., 2022b) 50.20 90.00 50.40 89.80
ZegClip(Zhou et al., 2023) 50.50 90.10 51.05 90.20
Ours model 52.80 91.63 53.95 91.30
Table 4: A Comparison of state-of-the-art detectors on the ZeroWaste-f test data set.
Models AP AP50 AP75 APs APm APl
Deformable Transformer (Zhu et al., 2021) 20.20 32.50 21.2 0.4 9.0 22.2
MaskRCNN (Dina Bashkirova and Saenko, 2022) 22.8 34.9 24.4 4.6 10.6 25.8
TridentN (Li et al., 2019) 24.2 36.3 26.6 4.7 10.8 26.05
Internimage (Wang et al., 2022a) 24.7 37.3 26.95 5.8 12.7 27.1
Ours model 26.40 38.05 27.70 8.1 16.89 30.90
input
CE+DL
CE+DL+FreezeConnect CE+DL+FreezeConnect+MS FN
Figure 5: Random samples of the segmentation and detection results on the ZeroWaste-f Dataset. Figure shows input image
with application of different modules for accurate and multiscale segmentation and detection.
Test Results Comparison
We evaluated the performance of our proposed model
using the basic setup described in section 4.1. As
shown in Table 3, our model achieved the best accu-
racy among all models tested on this dataset. Specifi-
cally, our model achieved a validation score of 52.80
%, which is 2.3% higher than the ZegClip score of
validation score of 50.50. Similarly, the testing score
is 2.90% higher with improved accuracy as compared
to the deeplab. This improvement demonstrates the
effectiveness of our proposed model in accurately
segmenting waste objects in the given dataset. Seg-
mentation results on the TrashCAN dataset as given
in Table 6 in Appendix also validate the performance
of our model. This shows the improved generaliza-
tion of our method while further detail is given in the
Appendix in section 4 where we give details of our
assessment test.
Enhanced Segmentation of Deformed Waste Objects in Cluttered Environments
577

5.3 Detection Task
As depicted in Table 4 for the detection task, our pro-
posed model consistently outperforms the previously
established state-of-the-art model on the ZeroWaste-f
dataset. For TrashCAN results are given in the Ap-
pendix in section 3, where we have compared our re-
sults with EfficientDet (Majchrowska et al., 2022) and
MaskRCNN(Dina Bashkirova and Saenko, 2022)
Test Results Comparison
Our experiments highlight the superior performance
of our model when compared to other models in the
field of object detection. Specifically, when employ-
ing Mask RCNN as our framework, our model show-
cased exceptional capabilities and outperformed the
alternative approaches. Table 4 presents a compre-
hensive comparison of various performance metrics
when benchmarked on ZeroWaste-f, illustrating the
efficacy of our model in terms of accuracy, and pre-
cision. These findings validate the effectiveness and
robustness of our proposed approach for object de-
tection too. The TrashCAN dataset’s comparative re-
sults are in the Appendix as Table 1. By leveraging
the Mask RCNN framework, our model demonstrates
a significant improvement in performance, providing
accurate and reliable detection results. A few sample
results are in Figure 5 while other results are in Ap-
pendix. In summary, our experiments clearly demon-
strate that our model, in conjunction with the Mask
RCNN framework, excels in object detection and un-
derscores its potential for various practical applica-
tions where precise and reliable object detection is es-
sential.
6 CONCLUSION
In this paper, we presented a unique computer vision-
based network configuration for efficient segmenta-
tion of waste objects in cluttered and disorganized en-
vironments, tailoring the InternImage model for seg-
mentation tasks. Our proposed approach incorporates
a dilated convolution layer in the stem layer to learn
spatially more complex representations and integrate
information from wider receptive fields. Furthermore,
we utilized a mutli-scale feedforward network and
leveraged a combination of cross-entropy and Dice
loss functions to enhance segmentation accuracy. We
also enhanced our results by employing the benefits
of Freezeconnect. We evaluated our model using the
ZeroWaste-f dataset as well as the TrashCAN dataset,
which contains overlapping objects in heavily clut-
tered scenes, achieving state-of-the-art results com-
pared to the baseline model.
Our block configuration method enhances waste
sorting and recycling by accurately separating recy-
clables in challenging conditions. This model can
also be adapted for future waste management tasks,
such as tracking waste flow. Its precise segmenta-
tion allows for the effective tracing of waste materials,
facilitating better understanding of waste distribution
and the optimization of processing routes.
REFERENCES
Bashkirova, D., Abdelfattah, M., Zhu, Z., Akl, J., Allad-
kani, F., Hu, P., Ablavsky, V., Calli, B., Bargal, S. A.,
and Saenko, K. (2021). Zerowaste dataset: Towards
deformable object segmentation in extreme clutter.
Bello, I., Zoph, B., Vaswani, A., Shlens, J., and Le, Q. V.
(2020). Attention augmented convolutional networks.
Chen, L.-C., Papandreou, G., Kokkinos, I., Murphy, K.,
and Yuille, A. L. (2016). Deeplab: Semantic
image segmentation with deep convolutional nets,
atrous convolution, and fully connected crfs. CoRR,
abs/1606.00915.
Chen, L.-C., Papandreou, G., Kokkinos, I., Murphy, K., and
Yuille, A. L. (2017). Deeplab: Semantic image seg-
mentation with deep convolutional nets, atrous convo-
lution, and fully connected crfs. IEEE transactions on
pattern analysis and machine intelligence, 40(4):834–
848.
Contributors, M. (2020). MMSegmentation: Openmmlab
semantic segmentation toolbox and benchmark. https:
//github.com/open-mmlab/mmsegmentation.
Deng, J., Dong, W., Socher, R., Li, L.-J., Li, K., and Fei-
Fei, L. (2009). Imagenet: A large-scale hierarchical
image database. In 2009 IEEE Conference on Com-
puter Vision and Pattern Recognition, pages 248–255.
Dina Bashkirova, Mohamed Abdelfattah, Z. Z. J. A. F. A.
P. H. V. A. B. C. S. A. B. and Saenko, K. (2022). Ze-
rowaste dataset: Towards deformable object segmen-
tation in cluttered scenes.
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., Dehghani, M., Minderer,
M., Heigold, G., Gelly, S., et al. (2020). An image is
worth 16x16 words: Transformers for image recogni-
tion at scale. arXiv preprint arXiv:2010.11929.
Dosovitskiy, A., Beyer, L., Kolesnikov, A., Weissenborn,
D., Zhai, X., Unterthiner, T., Dehghani, M., Minderer,
M., Heigold, G., Gelly, S., Uszkoreit, J., and Houlsby,
N. (2021). An image is worth 16x16 words: Trans-
formers for image recognition at scale.
Fulton, M. S., Hong, J., and Sattar, J. (2020). Trash-
ICRA19: A bounding box labeled dataset of under-
water trash. Retrieved from the Data Repository for
the University of Minnesota, https://doi.org/10.13020
/x0qn-y082.
Gundupalli, S. P., Hait, S., and Thakur, A. (2017). A review
on automated sorting of source-separated municipal
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
578

solid waste for recycling. Waste Management, 60:56–
74. Special Thematic Issue: Urban Mining and Circu-
lar Economy.
He, K., Gkioxari, G., Doll
´
ar, P., and Girshick, R. (2017).
Mask r-cnn. In Proceedings of the IEEE international
conference on computer vision, pages 2961–2969.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. In Proceedings of
the IEEE conference on computer vision and pattern
recognition, pages 770–778.
Hong, J., Fulton, M., and Sattar, J. (2020). Trashcan: A
semantically-segmented dataset towards visual detec-
tion of marine debris.
Huang, Y., Kang, D., Jia, W., Liu, L., and He, X. (2022).
Channelized axial attention–considering channel re-
lation within spatial attention for semantic segmenta-
tion. In Proceedings of the AAAI Conference on Arti-
ficial Intelligence, volume 36, pages 1016–1025.
Jo, S. and Yu, I. (2021). Puzzle-cam: Improved localiza-
tion via matching partial and full features. CoRR,
abs/2101.11253.
Jung, H. and Oh, Y. (2021). Towards better explanations
of class activation mapping. In Proceedings of the
IEEE/CVF International Conference on Computer Vi-
sion, pages 1336–1344.
Kingma, D. P. and Ba, J. (2017). Adam: A method for
stochastic optimization.
Krizhevsky, A., Sutskever, I., and Hinton, G. E. (2012).
Imagenet classification with deep convolutional neu-
ral networks. In Pereira, F., Burges, C., Bottou, L.,
and Weinberger, K., editors, Advances in Neural In-
formation Processing Systems, volume 25. Curran As-
sociates, Inc.
Lee, S., Lee, M., Lee, J., and Shim, H. (2021). Railroad
is not a train: Saliency as pseudo-pixel supervision
for weakly supervised semantic segmentation. In Pro-
ceedings of the IEEE/CVF conference on computer vi-
sion and pattern recognition, pages 5495–5505.
Li, Y., Chen, Y., Wang, N., and Zhang, Z. (2019). Scale-
aware trident networks for object detection. In Pro-
ceedings of the IEEE/CVF international conference
on computer vision, pages 6054–6063.
Liu, S., Zhi, S., Johns, E., and Davison, A. J. (2021a). Boot-
strapping semantic segmentation with regional con-
trast. arXiv preprint arXiv:2104.04465.
Liu, S., Zhi, S., Johns, E., and Davison, A. J. (2022a). Boot-
strapping semantic segmentation with regional con-
trast.
Liu, Z., Hu, H., Lin, Y., Yao, Z., Xie, Z., Wei, Y., Ning,
J., Cao, Y., Zhang, Z., Dong, L., et al. (2022b). Swin
transformer v2: Scaling up capacity and resolution.
In Proceedings of the IEEE/CVF conference on com-
puter vision and pattern recognition, pages 12009–
12019.
Liu, Z., Lin, Y., Cao, Y., Hu, H., Wei, Y., Zhang, Z., Lin, S.,
and Guo, B. (2021b). Swin transformer: Hierarchical
vision transformer using shifted windows.
Majchrowska, S., Mikołajczyk, A., Ferlin, M.,
Klawikowska, Z., Plantykow, M. A., Kwasigroch, A.,
and Majek, K. (2022). Deep learning-based waste
detection in natural and urban environments. Waste
Management, 138:274–284.
Mao, A., Mohri, M., and Zhong, Y. (2023). Cross-entropy
loss functions: Theoretical analysis and applications.
arXiv preprint arXiv:2304.07288.
”Minaee, S., ”Boykov, Y. Y., ”Porikli, F., ”Plaza, A. J., ”Ke-
htarnavaz, N., and ”Terzopoulos, D. (2021). Image
segmentation using deep learning: A survey.
Ouali, Y., Hudelot, C., and Tami, M. (2020). Semi-
supervised semantic segmentation with cross-
consistency training. In 2020 IEEE/CVF Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 12671–12681.
Pathak, D., Kr
¨
ahenb
¨
uhl, P., and Darrell, T. (2015). Con-
strained convolutional neural networks for weakly su-
pervised segmentation.
Proenc¸a, P. F. and Sim
˜
oes, P. (2020). Taco: Trash annota-
tions in context for litter detection.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
arXiv preprint arXiv:1409.1556.
Sudre, C. H., Li, W., Vercauteren, T., Ourselin, S., and
Jorge Cardoso, M. (2017). Generalised dice over-
lap as a deep learning loss function for highly unbal-
anced segmentations. In Deep Learning in Medical
Image Analysis and Multimodal Learning for Clini-
cal Decision Support: Third International Workshop,
DLMIA 2017, and 7th International Workshop, ML-
CDS 2017, Held in Conjunction with MICCAI 2017,
Qu
´
ebec City, QC, Canada, September 14, Proceed-
ings 3, pages 240–248. Springer.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S.,
Anguelov, D., Erhan, D., Vanhoucke, V., and Rabi-
novich, A. (2015). Going deeper with convolutions.
In Proceedings of the IEEE conference on computer
vision and pattern recognition, pages 1–9.
Tan, M. and Le, Q. (2019). Efficientnet: Rethinking model
scaling for convolutional neural networks. In Interna-
tional conference on machine learning, pages 6105–
6114. PMLR.
Vaswani, A., Ramachandran, P., Srinivas, A., Parmar, N.,
Hechtman, B., and Shlens, J. (2021). Scaling lo-
cal self-attention for parameter efficient visual back-
bones.
Wang, S., Li, B. Z., Khabsa, M., Fang, H., and Ma, H.
(2020). Linformer: Self-attention with linear com-
plexity.
Wang, W., Bao, H., Dong, L., Bjorck, J., Peng, Z., Liu, Q.,
Aggarwal, K., Mohammed, O. K., Singhal, S., Som,
S., et al. (2022a). Image as a foreign language: Beit
pretraining for all vision and vision-language tasks.
arXiv preprint arXiv:2208.10442.
Wang, W., Dai, J., Chen, Z., Huang, Z., Li, Z., Zhu, X., Hu,
X., Lu, T., Lu, L., Li, H., et al. (2022b). Internimage:
Exploring large-scale vision foundation models with
deformable convolutions.
Wang, W., Dai, J., Chen, Z., Huang, Z., Li, Z., Zhu, X.,
Hu, X., Lu, T., Lu, L., Li, H., Wang, X., and Qiao,
Y. (2023). Internimage: Exploring large-scale vision
foundation models with deformable convolutions.
Enhanced Segmentation of Deformed Waste Objects in Cluttered Environments
579
Wang, W., Xie, E., Li, X., Fan, D.-P., Song, K., Liang, D.,
Lu, T., Luo, P., and Shao, L. (2021). Pyramid vi-
sion transformer: A versatile backbone for dense pre-
diction without convolutions. In Proceedings of the
IEEE/CVF international conference on computer vi-
sion, pages 568–578.
Wang, W., Xie, E., Li, X., Fan, D.-P., Song, K., Liang,
D., Lu, T., Luo, P., and Shao, L. (2022c). PVT v2:
Improved baselines with pyramid vision transformer.
Computational Visual Media, 8(3):415–424.
Wu, H., Zhang, J., Huang, K., Liang, K., and Yu, Y.
(2019). Fastfcn: Rethinking dilated convolution in the
backbone for semantic segmentation. arXiv preprint
arXiv:1903.11816.
Xiao, T., Liu, Y., Zhou, B., Jiang, Y., and Sun, J. (2018).
Unified perceptual parsing for scene understanding.
Xie, S., Girshick, R., Doll
´
ar, P., Tu, Z., and He, K. (2017).
Aggregated residual transformations for deep neural
networks. In Proceedings of the IEEE conference on
computer vision and pattern recognition, pages 1492–
1500.
Zamir, S. W., Arora, A., Khan, S. H., Hayat, M., Khan,
F. S., and Yang, M. (2021). Restormer: Efficient trans-
former for high-resolution image restoration. CoRR,
abs/2111.09881.
Zhai, X., Kolesnikov, A., Houlsby, N., and Beyer, L. (2022).
Scaling vision transformers. In Proceedings of the
IEEE/CVF Conference on Computer Vision and Pat-
tern Recognition, pages 12104–12113.
Zhou, Z., Lei, Y., Zhang, B., Liu, L., and Liu, Y. (2023).
Zegclip: Towards adapting clip for zero-shot seman-
tic segmentation. Proceedings of the IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition
(CVPR).
Zhu, X., Hu, H., Lin, S., and Dai, J. (2019). Deformable
convnets v2: More deformable, better results. In Pro-
ceedings of the IEEE/CVF conference on computer vi-
sion and pattern recognition, pages 9308–9316.
Zhu, X., Su, W., Lu, L., Li, B., Wang, X., and Dai, J. (2021).
Deformable detr: Deformable transformers for end-
to-end object detection.
APPENDIX
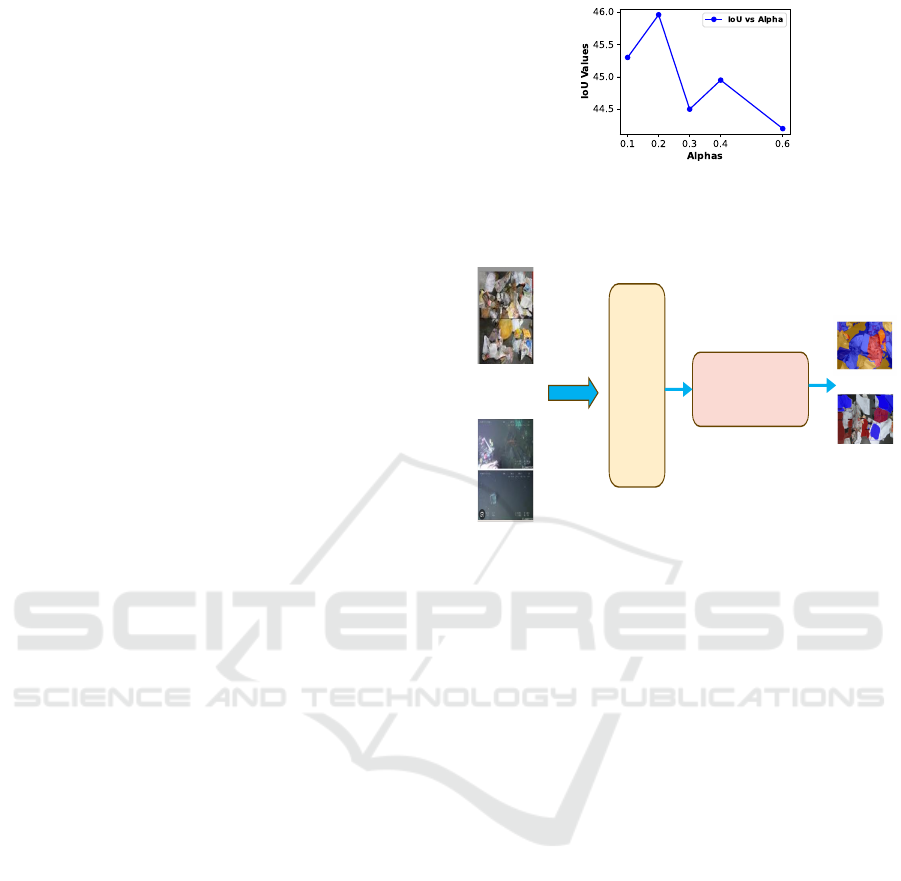
Hyper Parameters for Weight Loss
Different hyperparameters for loss weight give us dif-
ferent mIoU values. We present these results in Figure
6.
Overall Pipeline
The complete pipeline can be seen as a block dia-
gram as in Figure 7. The images from benchmarked
datasets are passed through segmentation and detec-
tion frameworks using our model. These backbones
are pre-trained with classification weights.
Figure 6: Variation in mIoU Values with Different Loss
Weight Hyperparameters.
UperNet \MaskRCNN with
pretrained classification
weigths
ZeroWaste
TrashCAN
Ours Enhanced
Segmentation Detection
Model
Segmentation
Detection
Figure 7: Pipeline Overview: This figure displays the flow
from input image through backbone stages to the segmenta-
tion and detection models, culminating in the output, show-
casing the process at a block level.
‘
Segmentation and Detection Results on
TrashCAN
Detection results for TrashCAN dataset are given in
Table 5 Where we compare our model’s performance
against other models on TrashCAN. We further dis-
play results of our model in Figures
respectively. These indicate the performance of
our model for both of these tasks. We evaluated the
performance of our model on the TrashCAN dataset,
which is a challenging dataset for waste paper seg-
mentation and detection. The results are shown in Ta-
ble 5, where we compare our model’s performance
against other state-of-the-art models. Our model
achieved the best performance on all metrics, includ-
ing mean intersection over union (mIoU) and preci-
sion.
We also visualized the detection and segmentation
results of our model in Figures 8 . Figure 1 shows the
segmentation results of our model on a sample image
from the TrashCAN dataset. The different colors in
the image represent different waste paper categories.
Figure 2 shows the detection results of our model on
the same image. The bounding boxes in the image
show the location of the detected waste paper objects.
These results indicate that our model is able to
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
580

Table 5: Comparison of state-of-the-art detectors on the
TrashCAN dataset.
Models AP AP50 AP75 APs APm APl
EfficientDet 29.1 51.21 87.83 28.22 30.20 40.0
MaskRCNN 30.0 55.3 29.4 23.2 31.7 48.6
Internimage 30.80 54.3 31.4 26.2 32.7 47.6
Our model 32.91 55.06 36.70 33.09 34.00 49.51
Table 6: Segmentation results on the TrashCAN.
Methods mIoU Acc
EfficientDet 45.39 80.50
InternImage (Wang et al., 2022b) 47.92 81.85
Ours model 50.98 85.28
(a) Original Image
(b) Image without MSFN
(c) Image WITH MSFN + Freezeconnect
Figure 8: Sample Images with Ablation Effects.
accurately segment and detect waste paper objects
in cluttered environments. This makes our model a
promising candidate for applications such as waste re-
cycling and waste sorting.
Robustness Evaluation
One of the critical aspects of assessing the robust-
ness of any machine learning model, especially in the
fields of segmentation and object detection, is con-
ducting evaluations across diverse datasets. These
datasets often contain varying scenarios, environmen-
tal conditions, and object classes. By subjecting your
model to different datasets, you aim to ensure that it
can generalize effectively and provide reliable results
in a wide range of real-world situations.
To gain a comprehensive understanding of our
model’s robustness and effectiveness, we conducted
a thorough comparison with various other models
commonly used in segmentation and object detection
tasks. We also perform statistical testing on the basis
of mIoU values with the null -hypothesis of the mean
of mIoU values of our model and the interchange is
the same. We computed 5 values for both models
and then computed the result based on p-value and
t-statistic and we found out that the importance of p
is 0.067 with a t-statistic of 2.18. As the value of p is
more than 0.067 it almost validates our hypothesis,
further, our findings indicate that, within the context
of Waste datasets, there is significant potential for
our model’s utility. This implies that continued
refinement and development of our model could
yield substantial benefits for waste management
applications, thereby contributing to the improved
results and practical significance of our research.
Enhanced Segmentation of Deformed Waste Objects in Cluttered Environments
581
