
Finite Interval Processes: Simulating Military Operations
Robert Mark Bryce
Defence Research and Development Canada (DRDC) – Centre for Operational Research and Analysis (CORA),
Keywords:
Stochastic Process, Military Operations, Scheduling.
Abstract:
We discuss extending Poisson point processes to finite interval processes, in the context of simulating military
operations over time. Conceptually the extension is simple, points are extended to finite duration of length
equal to the operations’ duration. We discuss effects of finite duration, namely lowering of set frequencies (and
therefore artificially reduced expected demand) due to the extension of points to intervals—and its correction.
The Canadian Armed Forces (CAF) has a Force Structure Readiness Assessment (FSRA+) Monte Carlo sim-
ulation tool that implements a finite interval process, and the results here offer insight on the approach.
1 INTRODUCTION
Armed Forces project military power via operations,
and the capacity to maintain operations is fundamen-
tal to delivery a credible military capability. As one
example, the Canadian Armed Forces (CAF) is man-
dated under the Canadian Defence strategy Strong,
Secure, Engaged (SSE) (Department of National De-
fence, 2017) to deliver concurrent operations of speci-
fied attributes including location (domestic or interna-
tional), size, and duration. The purpose of this paper
is to consider modelling operations as a finite interval
stochastic process, which is derived from a stochas-
tic point process model, to support analysis of mili-
tary operations over time (e.g., to estimate mat
´
eriel—
including ammunition—usage, determine staffing re-
quirements, etc.).
The CAF has developed an approach (Force Mix
Structure Design, or FMSD) and a related Monte
Carlo tool (Force Structure Readiness Assessment, or
FSRA+) which considers operations occurring over
time. The main focus of the approach is currently
on staffing (Dobias et al., 2019), but is general and,
for example, mat
´
eriel usage can be considered (Serr
´
e,
2021). As operations have various Force Elements as-
signed to them, for example, a Field Artillery Battery,
Field Hospital, or Frigate, given this mapping analy-
sis can make use of this refined level of detail. A good
overview of the development and use of FSRA+ is
provided by (Dobias et al., 2019), which is a key rele-
vant publication describing finite interval processes to
model military operations. For our purposes we will
strip down to a simplified version of FSRA+, where
we do not consider concurrency and other compli-
cating factors which FSRA+ accounts for, and rather
we solely consider the scheduling of operations of set
types over a time horizon. The core parameteriza-
tion of operations is a label (allowing identification
which allows, for example, observing which opera-
tions occur when and for Force Elements to be as-
signed), a probability distribution describing an oper-
ations’ durations (currently a triangular distribution is
being used by FSRA+), and an annual frequency of
occurrence. To create a realization a time horizon is
set (e.g., 5 or 10 years), time is discretized into time
steps ∆t (e.g, 1 or 2 months), and, starting from t = 0,
the time steps are stepped through and operations are
either started, or not. To determine if an operation is
initiated in a time step the following heuristic method
is used (Strategic Analysis Support, 2019). A pool of
candidate operations is made by drawing K
i
copies of
the ith operation, using the relevant Poisson parameter
describing the frequency of occurrence. This pool can
be empty, or filled with various copies of operations.
The pool is then drawn from, uniformly at random.
The operation type drawn, if any, is then initiated, a
duration drawn, and the next time steps filled with the
operation. The process then steps to the next time
step and proceeds until the time horizon is exhausted.
To mitigate initial condition artifacts there is a burn-
in period, equal to the time horizon length, which is
truncated. This approach is pragmatic and has been
subject to empirical tests. We note the following—
the heuristic approach closely follows the continuous
356
Bryce, R.
Finite Interval Processes: Simulating Military Operations.
DOI: 10.5220/0012424700003639
Paper copyright by his Majesty the King in Right of Canada as represented by the Minister of National Defence
In Proceedings of the 13th International Conference on Operations Research and Enterprise Systems (ICORES 2024), pages 356-363
ISBN: 978-989-758-681-1; ISSN: 2184-4372
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.

time Poisson process and the related Bernoulli pro-
cess (the discrete time approximation), where there
is slight differences in sampling (e.g., the pool) and,
instead of single time step durations, extended finite
durations are considered. Here will look at the con-
tinuous time Poisson point process and extending it
to a finite interval process to allow more direct con-
tact with the Poisson point process.
Details are provided in the theory section, but in
brief we sample independent realizations from Pois-
son point processes parameterized by the initiation
frequencies of the various operation mix we are mod-
elling, merge these, and then expand by sampling du-
rations. When moving from a point process, where
there is no duration (infinitesimals), to finite inter-
vals there is an expansion of the time axis (see Fig-
ure 1). This expansion will result in realizations of
the stochastic process to have observed frequencies
lower than the set input frequencies, which will have
a corresponding reduction in the demand. This ef-
fect can be pronounced, depending on the frequency
and the durations. For example, if one has an annual
frequency (1/year) and a fixed duration of one year
then after expanding the observed frequency will half
thereby leading to a significant effect. The effect of
frequency reduction will be to reduce the observed
frequency of a given operation type, biasing analy-
sis in a manner which can be significant. A core aim
of this paper is to qualify and quantify this frequency
reduction.
Figure 1: Expansion when moving from a point to an in-
terval process. The finite durations expands the time scale,
reducing the operational frequencies.
This paper proceeds as follows. We first sketch
the required theory, outlining the approach taken in
more detail. We then describe the frequency reduc-
tion seen in the input operation frequency due to fi-
nite durations (expansion) and develop a correction.
We next provide a scheme to remove initial condition
artifacts to ensure ergodicity before overviewing the
algorithmic approach taken. We then outline numer-
ical experiments to subject our theory to test and in
the results section we provide the numerical evidence
to allow assessment of the approach developed here.
In the discussion we consider implications and future
work, before concluding.
2 THEORY
2.1 Finite Interval Processes:
Continuous Time
A Poisson process can be considered as time ordered
points (infinitesimals of zero measure) that are sep-
arated by exponentially distributed intervals λe
−λt
,
where the rate λ parameterizes the distribution. Of
importance here, Poisson processes are additive so
if we have two processes X ∼ Poisson(λ
x
) and Y ∼
Poisson(λ
y
) then X +Y ∼ Poisson(λ
x
+ λ
y
) (see, for
example, (Gallager, 2013)). If we have two realiza-
tions, X and Y , which have points at specific times,
we can simply combine (merge) these to obtain a re-
alization of the combined process.
Here we will take the following stance: we will
make use of the tractability and core understanding of
the Poisson point process as the foundation to build
on. We will determine operation start times using
Poisson process realizations, for each operation type
or variant we consider. We then use their additive
properties to merge them together (here we note that
formally, as the points are real numbers, we have zero
probability of collision when we merge). After merg-
ing we then turn the point process into an interval
process, by sampling the appropriate duration distri-
bution and expanding time by these durations in a for-
ward manner (e.g., we start with the first instance and
expand—moving each subsequent point to the right—
and work through each point; see Figure 1). One de-
tail: each of our processes have their first point occur
after t = 0, e.g., we do not start on, or in, an operation.
This implies there will be initial time artifacts, which
we will address below.
In summary, we rely on the additive property of
Poisson processes to allow independent realizations
(each describing an operation of a given type) to be
combined, and then turn this into a finite interval pro-
cess by expanding by the appropriate durations. In-
trinsic to the process we will have a reduction of set
input frequencies, as we expand time by the durations.
2.2 Frequency Reduction
Here we consider the frequency reduction of a point
process as it becomes a finite interval process.
Consider a single operation of type, or variant, i.
The average case will have mean duration
d
i
and, for
point processes, there is a typical separation of T
i
=
1/ f
i
, where f
i
is the set frequency. The intention is
that the time between operation starts is, on average,
T
i
, but instead the observed time between operations,
ˆ
T
i
, is inflated by the finite duration of operations
Finite Interval Processes: Simulating Military Operations
357

ˆ
T
i
=
1
f
i
+ d
i
=
1 + f
i
d
i
f
i
=
1
ˆ
f
i
, (1)
where
ˆ
f
i
is the observed frequency.
We can artificially increase the input operations’
frequency such that, after expansion, will recover the
desired frequency, as follows
˘
f
i
=
f
i
1 − f
i
d
i
(2)
which can be confirmed by substituting back in Equa-
tion 1 which recovers the intended
ˆ
T
i
= 1/ f
i
. Note
that we have the requirement that f
i
d
i
is strictly less
than one.
The frequency reduction, and its correction, can
be understood by considering the amount the unit
time expands when we move from a point process to
an interval process. In expectation, for the single vari-
ant case, we have f
i
d
i
expansion per unit time, and so
to correct this we have to rescale by 1 − f
i
d
i
. This
indicates that for the multi-variant case we want to
rescale by the total expansion and so
˘
f
i
=
f
i
1 −
∑
j
f
j
d
j
, (3)
and now our constraint is that
∑
j
f
j
d
j
must be strictly
less than one. If this condition cannot be met then we
cannot correct.
As an example of frequency reduction and its’ cor-
rection consider two variants, both with a frequency
of 0.1/year and a mean duration of 2.5 years. In ex-
pectation, for point processes on 10 year horizon we
expect one of each variant and so will see an expan-
sion to 15 years, dropping their observed frequency
to 1/15. If we apply the correction we find
˘
f
i
= 1/5,
a significant change from the desired 1/10 frequency.
In expectation, for such point processes on a 5 year
horizon we expect one of each variant and we see an
expansion to 10 years—we will observe the desired
frequency of 0.1.
To summarize, if we use the set frequencies for
operations of finite duration we will see an expansion,
which has the effect of initiating fewer operations of
a given type per unit time then intended. If
∑
j
f
j
d
j
is one or greater we cannot correct this situation and
our proposed operations and their parameters are mis-
specified and our assumed model is not realizable—if
we want to take the na
¨
ıve view that input frequencies
describe the operations frequency. If
∑
j
f
j
d
j
is less
than one, then we can correct by applying Equation 3
to our set (intended) frequencies and use these when
making realizations of our stochastic process.
2.3 Initial Condition Artifacts
As operations start at t > 0 we cannot start mid-way
through an operation. This means that ergodicity is
violated, as the initial time region is special due to
initial condition artifacts. To correct for this we can
truncate the first part of a simulated time line, a pro-
cess known as burn-in. For example, recall FSRA+
takes a pragmatic view of doubling the time horizon
and truncating the first half to mitigate initial condi-
tion artifacts.
Here we propose an alternative approach. We
build up operations which occur some time after t
0
=
0 and which end at some maximum time, t
m
= M, at
the termination of the last operation. We consider
time to be periodic (i.e., t
0
= t
m
and time “wraps
around”). If we uniformly, at random, select a point in
[0,M) and set this as the new t
0
we will no longer priv-
ilege any time. The expected probability of starting
with t
0
in an operation is the mean duration divided by
the expanded unit time (i.e.,
∑
j
f
j
d
j
/(1 +
∑
j
f
j
d
j
)),
and we see that our uniform selection of a start time
in our simulated time horizon will cut an operation
with the same probability—our randomized start time
procedure will ensure ergodicity and eliminate initial
condition artifacts.
2.4 Overview of the Core Algorithm
We now review the core concepts of the algorithm:
1. For each operation type (variant) we sample the
appropriate exponential distribution to find inter-
operation distances such that we cover the simu-
lation interval T , and the appropriate distribution
paramaterization to find durations. We find the
start times for the point process.
2. We merge these processes, retaining order by start
time.
3. We expand, using the durations. We truncate at
the end of the last operation instance.
4. We randomly select a start time with periodicity
in mind, enforcing ergodicity.
The inputs required are the desired simulation time
horizon T , the scenario’s frequencies, and the sce-
nario’s duration parameterization. The output is a
table/dataframe with operation type id’s, start times,
and durations over a simulated time that is ≳ T long.
Depending on analysis one either can truncate at T ,
or retain the longer horizon to improve statistics (here
we do not truncate).
Note that, to correct for expansion effects (in-
put frequency reduction), the operations’ frequencies
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
358

should be increased according to Equation 3 and these
be used.
3 NUMERICAL EXPERIMENTS
We consider several special cases and numerical ex-
periments to verify the theory and discuss practical
concerns. The intent is not an exhaustive study, but
rather to subject the core elements to critical tests.
3.1 Case 1: Single Variant
The simplest case is a single operation.
Case 1: We consider a set average frequency of
once a year and uniformly distributed durations on
[0,2(1 −ε)) so that the average duration is d = 1 −ε.
Inverting Equation 1, we find the expected fre-
quency reduction is
ˆ
f = 1/(2 − ε); as a check on
the theory, note that for ε = 0 the average duration
is one and so we expect the frequency to half and as
ε → 1 we converge to a point process and expect no
frequency reduction (frequency remains unity). The
frequency correction is
˘
f = 1/ε.
We will measure the observed reduction in fre-
quency as a function of ε and compare against the the-
ory. Additionally, we will perform the correction as a
function of ε and observe the frequency and compare
against expectation (unity).
3.2 Case 2: Multiple Variants
We consider multiple operation types. For simplicity
we will consider fixed duration.
Case 2: Here we consider a fixed duration of one
year, and a frequency of 1/2
i
where i indexes the op-
erations. In the limit of infinite operations we there-
fore have
∑
j
f
j
d
j
=
∑
j
1
2
j
→ 1 and we approach the
singularity in a controlled manner.
Here we will perform the correction and mea-
sure the normalized residual. Our set (intended) fre-
quencies are f
i
= 1/2
i
and the correction is
˘
f
i
=
(1/2
i
)/(1 −
∑
K
j=1
(1/2
j
), where we have K variants
(in the limit of K → ∞ we hit a singularity). It can be
shown (via induction) that
∑
K
j=1
(1/2
j
) = (2
K
−1)/2
K
and so we find
˘
f
i
= 2
K−i
. We apply the correction,
run our numerical experiments, and observe the fre-
quencies
ˆ
f
i
and compare with the intended frequency
f
i
= 1/2
i
. To summarize the error we look at the
summed absolute normalized residual R
K
=
∑
j
|
ˆ
f
j
−
1/2
j
|/(1/2
j
), which we expect to have a positive bias
(as we are taking the absolute values and summing).
We will look at various K, and plot R
K
against 1/K
such that as K → ∞ we have 1/K → 0 and we can
plot on (0,1].
3.3 Case 3: Ergodicity
We consider our proposed means of ensuring ergod-
icity and eliminating initial condition artifacts.
Case 3a: We consider a single operation type,
where have a set frequency of 0.1/year and a symmet-
ric triangular distribution with a minimum duration of
0 years, a mode of 1 year, and a maximum of 2 years
(average duration of 1 year). We will experimentally
measure how often we cut an operation when select-
ing our new t
0
, and compare it against the expected
value of 1/(10 + 1) = 0.09.
Case 3b: We consider the multi-operation type
case, with two variants. The first is parameterized as
in Case 3a and the second has twice the frequency
and duration. We again experimentally measure how
often we cut operations when we select our new t
0
,
here tracking which variant is cut. The expected value
of cutting an operation is 0.1/(1 + 0.5) + 0.4/(1 +
0.5) = 1/15 +4/15 = 1/3 = 0.3, where the first term
is the probability of cutting the first operation type
(1/15 = 0.06) and the second term is the probability
of cutting the second operation type (4/15 = 0.26).
4 RESULTS
4.1 Case 1: Single Variant
We simulate over a time horizon of 100,000 years and
we replicate this 100 times. In Figure 2 we see that
the derived frequency reduction (solid line) accurately
describes the observed frequencies (dots). Stochastic
fluctuations are smaller than the symbol size (standard
deviations are on the order of 10
−3
).
Figure 2: Observed (dots) and theoretical (line) frequency
reduction for Case 1.
We then first apply the frequency correction and
then simulate. To prevent hitting the singularity we
Finite Interval Processes: Simulating Military Operations
359

use a minimum ε of 0.01 in place of zero. Figure 3
demonstrates that the correction results in the recov-
ery of the desired frequency (unity here). The error
bars illustrate the standard deviations observed.
Figure 3: Observed (dots) and expected (dotted line) fre-
quency, when frequency correction is applied for Case 1.
4.2 Case 2: Multiple Variants
Here we consider a time horizon of 1,000 years and
100 replications. We look at K = 1 . ..10 and find the
summed absolute normalized residual R
K
of the fre-
quencies. We see limited error in Figure 4, e.g., at low
K we see about 1% error, and as K →∞ both the error
and variance (error bars are the standard deviations
observed) appear to converge to zero.
Figure 4: Observed (dots) and expected (dotted line) nor-
malized residual, when frequency correction is applied for
Case 2.
4.3 Case 3: Ergodicity
For Case 3a (single variant) we consider a time hori-
zon of 1,000 years and 10,000 replications. We find
that the observed probability of cutting an operation
(having t = 0 selected to start within an operation)
to be 0.0933, with a standard error of 0.00291—in
agreement with the expected value of 0.09.
For Case 3b (two variants) we find for the first
(second) operation the probability of a cut is 0.0671
(0.262) with a standard error of 0.00250 (0.00440)—
again in agreement with the expected values (of
1/15 = 0.06 and 4/15 = 0.26); the probability of cut-
ting any operation is 0.329 with a standard error of
0.00470, in agreement with the overall expected value
of 1/3 = 0.3.
5 DISCUSSION
For both Case 1 (single variant) and Case 2 (multi-
ple variants) as the magnitude of the frequency cor-
rection becomes large (ε → 0; K → ∞) the error be-
comes small (see Figure 3 and 4); for both cases we
see variation reduce significantly and error trend to-
wards zero. We attribute this to reduced finite sample
size induced variation and error (law of large num-
bers): note that as the correction becomes large we
have higher frequency, and so we will have both less
sampling variation and smaller overall error. The
larger apparent error in Case 2 over Case 1 can be at-
tributed to two factors. First, use of a shorter horizon;
computational time was much longer for equivalent
time horizons in Case 2 over Case 1, which can be at-
tributed to the overall 55 more variants considered (as
we range K from 1 to 10) and so a shorter time hori-
zon was selected. As the time horizon is 100X shorter
than in Case 1 we expect roughly 10X the finite sam-
ple induced error over Case 1 (following the ∝ 1/
√
N
rule for the standard error of the mean, where N is the
sample size)—however, note that in Case 1 we have
stochastic durations while in Case 2 we fix our dura-
tion that source of error is eliminated in Case 2, which
is a mitigating factor. Second, in Case 2 we look at the
summed absolute normalized error so absolute values
are taken in Case 2, rather than the mean frequency in
Case 1 (where fluctuations will tend to average out),
and so error is nonnegative and additive.
For context in interpreting the error levels ob-
served in Case 2, note that for lower K values we
see we have a relative error level of 1%—compare
this to the frequency reduction expected for an uncor-
rected input frequency of roughly 30% relative error
for K = 1 (as 1/2 shifts down to 1/3).
For K = 10 we expect, on average, less than one
operation per realization for the 10th operation and
here we find the total absolute error is larger (0.00160,
with a standard mean error of 0.0000525), but on the
order of, the error associated with that term alone
when we have no operation (1/2
10
≈ 0.001)—we are
seeing limited, finite sample based fluctuations. It is
worth mentioning that as 1/K → 0 we have first mod-
erately increasing, and then more strongly decreasing,
error. We attribute this to two competing effects (in
addition to the visual artifact whereby the decreasing
separation of points on the 1/K axis makes the slope
appear larger). First, the above mentioned law of
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
360

large numbers suppressing finite sample induced er-
ror. Second, as K increases we have more terms in the
residual sum and thus increasing error (note, however,
that the rate of growth of the sum rapidly decreases as
more terms are added). These two effects will com-
pete and we attribute the complex shape to this com-
petition. Future work can increase the time horizon or
replication number to drive the error levels lower and
increase precision, and could also break away from
the summed absolute error, which was selected as a
simple summary statistic at a cost of magnifying ob-
served error, to look at individual
ˆ
f
i
components—
however, the results here are strong and provide quan-
titative support of the frequency correction efficacy.
We find that ergodicity holds following our initial
time selection scheme, in the sense that we start time
(select our t = 0) in the midst of an operation with the
expected probability for the cases we checked. We
expect this, as our merged process, as long as it holds
at least one operation, will consist of inter-operation
separations and operations without any truncation ef-
fect (recall that we start at t = 0 and end at a maximum
time t
m
= M at the termination of the final operation).
If we then randomly select a point in [0, M) as our new
t = 0 we will cut operations with the correct probabil-
ity, by design. The result is there is no privileged time
and ergodicity holds.
In this work we considered continuous time,
where we take a point process and extend to a finite
interval process. This expansion results in reduction
of operations’ frequencies from those used as input.
While we do not consider the discrete time approx-
imation we note that the FSRA+ approach iterates
through the discrete time steps, and when we initi-
ate a operation we draw a duration and fill in that
many time steps before proceeding. So we see the
frequency reduction also occurs in the discrete time
step approximation approach, which is intuitive as
our initiation probability assumes we draw on each
time step yet skipping/expanding over several time
steps for finite durations reduces the initiation fre-
quency. If one desires a discrete time output, for
example for analysis purposes, creating a continuous
time realization followed by discretization is an op-
tion, as is use of FSRA+ which directly uses discrete
time. Additionally, inspired by FSRA+ and the work
here, a slightly modified approach has been outlined
in (Bryce, 2023), and which is summarized in the
Appendix: Synopsis of a discrete time algorithm to
schedule military operations.
We note that the pool sampling used by FSRA+
to initiate operations is heuristic, and therefore there
is some concern that it may introduce error. Here we
elucidate biasing effects and provide some evidence
that any bias will be small, by considering the sim-
plest case: two variants, say of type x and y. For the
two variant case, the pool process will lead, in a given
time step, a relative probability of an operation of type
x of
b
p
′
x
= X/(X +Y ), however note that
E[p
′
x
] = E[X /(X +Y )] ̸= E[X]E[
1
X+Y
]
̸=
E[X]
E[X+Y ]
=
E[X]
E[X]+E[Y ]
=
λ
x
λ
x
+λ
y
,
(4)
where we desire the left side be equal to the right
side to obtain the correct relative probability p
′
x
, but
as the numerator and denominator are not indepen-
dent we have the first inequality and due to Jensen’s
inequality we have the second inequality (see, for ex-
ample, (Wasserman, 2004)), and the left hand and
right hand sides are not strictly equal in general.
However, note that the first effect tends in one di-
rection (as the covariance of X and 1/(X + Y ) is
negative; recall that E[AB] = E[A]E[B]+Cov(A,B))
while the other effect is in the opposite direction
(E[1/A] > 1/E[A]) and so they will tend to cancel
each other. Further, note that p
′
x
+ p
′
y
= 1 must hold
and so the bias sign and magnitude is sensitive to
the parameters; if one is biased in one direction the
other must be biased in the other direction. Numeri-
cal experiments show that bias is small for even rel-
atively large separation in parameters. For example,
for λ
x
= 1 and λ
y
= 99 we sample a billion X and
Y Poisson numbers (near the memory limit of the
machine used), find
b
¯
p
′
x
and
b
¯
p
′
y
, and repeat this 100
times: the mean values are 0.00999998970013 with
a standard error of 0.00000000000978 (expectation
is 0.01) and 0.99000001029986 with a standard er-
ror of 0.00000000000978 (expectation is 0.99). We
see a small (negligible), but existing, bias. While the
arguments here are on the simpler case of two vari-
ants the insights should apply to larger numbers of
variants (for example, if we group and label all op-
erations not of type x as y the arguments here hold,
and much of the insight can directly apply to more
than two variants). To quantify the magnitude of any
bias it would be useful to test with the specific oper-
ations mix and parameterizations modelled, however
the arguments here provide a qualified verification of
the pool heuristic, as any bias will be small due to
the competition of the biasing effects and the small
magnitude observed even for relatively large parame-
ter differences in the two variant case (the considered
parameters of 1 and 99 speaks to a ≈ 100 fold differ-
ence in frequency, which should capture the parame-
ter range seen in many contexts). The pool sampling
heuristic appears to perform well in practice.
To keep focused on essentials we have not consid-
ered concurrency constraints here, however this con-
sideration is important in practice so we will provide
Finite Interval Processes: Simulating Military Operations
361

some comments. First, one can not constrain con-
currency by sampling start of operations via realiz-
ing a Poisson process and determine their ends by
sampling the appropriate duration distribution (here
time is not expanded, rather operations are overlaid
on the time axis). This approximation can be suitable
(see, for example, (Fee and Caron, 2021) or (Couil-
lard et al., 2015), where this approach is used in a
military context, and the references within) and does
not suffer from frequency reduction, but, in general,
we can have an unbound number of concurrent op-
erations if we use this approach and so peak concur-
rency can be unrealistic. Second, using the finite in-
terval process approach allows us to simulate a man-
date to have C concurrent operations by considering C
parallel independent realizations, where each realiza-
tion has appropriately scaled frequencies ( f
i
→ f
i
/C ).
The additive property of Poisson processes will led to
the correct overall frequency for each operation type
when we take the C parallel realizations in combina-
tion, and we see that by considering C parallel realiza-
tions we allow up to C concurrent operations. More
generally, we may have lines of operation, each of
which with relevant operation types and concurrency
requirements and we would break the simulated time
line out to determine the overall realization (for exam-
ple, SSE mandates two major sustained deployments,
one major time-limited deployment, two minor sus-
tained deployments, and two minor time-limited de-
ployments, as well as other requirements (Department
of National Defence, 2017)). It is noteworthy that
FSRA+ does account for these lines of operations and
concurrency requirements, as well as other complex-
ities such as ongoing constant demands and various
constraints on Force Elements (Dobias et al., 2019).
FSRA+ speaks to the capacity and capability of
the CAF, and breaks down operations by Force Ele-
ments and staffing of those Force Elements. For this
reason FSRA+ lives on a classified network. The op-
eration variants and scheduling parameterizations are
not secret, as the underlying information is available
in the public domain, and so schedules themselves are
not classified. One motivation of this work was to
work towards a light weight operation schedule gener-
ator which could be used off the classified network, to
facilitate analysis (e.g., in the study (Serr
´
e, 2021) only
schedules output by FSRA+ where used and analysis
was done off the classified network). Due to suitabil-
ity for development and analysis Python was selected
as a language, which makes time stepping computa-
tionally expensive, which was a pragmatic rationale
for considering continuous time processes (however,
see the Appendix for a discrete time approach that is
viable in Python). On the formal side, making con-
tact with established theory and basic principles was
a key motivator and rationale for considering con-
tinuous time. The results here lay the ground work
for a more mature implementation that can simulate
CAF operation schedules, taking line of operations
and concurrency into account.
While we have focused on scheduling of military
operations, as this was the application in mind, un-
scheduled maintenance and other such applications
can be addressed with the same approach. For ex-
ample, unplanned air craft maintenance schedules can
be generated, given a mixture of maintenance types
(“operation types”), their frequency, and the number
of aircraft (“concurrency”), and with these schedules
resource use can be determined.
Two key aspects have been established here. First,
we provide an independent validation of the FSRA+
approach by making contact with stochastic processes
and, second, in doing so provide a scheme to ensure
input frequencies are recovered. This is important as
it simplifies interpretation and as otherwise input fre-
quencies are biased downwards in an opaque manner,
which likewise reduces demands. As a consequence
demands will be lower than suggested by the input
frequencies which implies we will plan for an artifi-
cially small demand.
6 CONCLUSION
Here we extended Poisson point processes to finite
interval processes, for simulating military operations
over time. The work was motivated by a prag-
matic tool in use by the CAF, FSRA+, which uses
a discrete time approach. We outlined the contin-
uous time approach, characterized the frequency re-
duction whereby input frequencies are reduced when
points are extended to intervals, provided a correction
scheme to address this, provided a scheme to ensure
ergodicity (i.e., eliminate initial condition artifacts,
without the need for burn-in), and subjected the ap-
proach to essential numerical tests. We have also pro-
vided a qualified verification of FSRA+’s pool pro-
cess to initiate operations, demonstrating there will be
a bias—but of small (negligible) magnitude. We note
that the additive property of Poisson point processes is
fundamental in allowing the development and under-
standing of the interval process described here, for ex-
ample allowing concurrency to be cleanly modelled,
which recommends consideration of this approach to
model mixtures of military operations with possible
concurrency mandates.
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
362
REFERENCES
Bryce, R.-M. (2023). Generating military operation
schedules with controlled concurrency: Analysis of
the Force Structure Readiness Assessment approach.
Technical Report DRDC-RDDC-2023-R130, Defence
Research and Development Canada, Ottawa, Canada.
Couillard, M., Arseneau, L., Eisler, C., and Taylor, B.
(2015). Force mix analysis in the context of the Cana-
dian Armed Forces. In Proceedings from the 32nd
International Symposium on Military Operational Re-
search, pages 1–13, Birmingham, United Kingdom.
The Operational Research Society.
Department of National Defence (2017). Strong, Secure,
Engaged: Canada’s defence policy.
Dobias, P., Hotte, D., Kampman, J., and Laferriere, B.
(2019). Modeling future force demand: Force mix
structure design. In Proceedings from the 36th In-
ternational Symposium on Military Operational Re-
search, pages 1–8, Birmingham, United Kingdom.
The Operational Research Society.
Fee, M. and Caron, J.-D. (2021). A simulation model to
evaluate naval force fleet mix. In Kim, S., Feng, B.,
Smith, K., Masoud, S., Zheng, Z., Szabo, C., and
Loper, M., editors, Proceedings of the 2021 Winter
Simulation Conference, pages 1–12, Piscataway, New
Jersey. Institute of Electrical and Electronics Engi-
neers, Inc.
Gallager, R. G. (2013). Stochastic Processes: Theory
for Applications. Cambridge University Press, Cam-
bridge, United Kingdom.
Serr
´
e, L. (2021). Bridge and gap crossing modernization
project: Modelling the frequency of use. Technical
Report DRDC-RDDC-2021-R082, Defence Research
and Development Canada, Ottawa, Canada.
Strategic Analysis Support (2019). FSRA+ algorithm visual
explanation (slide deck).
Wasserman, L. (2004). All of Statistics: A Concise Course
in Statistical Inference. Springer, New York, New
York.
APPENDIX
Synopsis of a Discrete Time Algorithm to
Schedule Military Operations
We outline a discrete time algorithm to schedule mil-
itary operations, following (Bryce, 2023).
FSRA+ is a single pass discrete time algorithm,
where operations are initiated via a random pool pro-
cess (see the main text for discussion). Figure 5 illus-
trates the creation of a realization. The arrows denote
where operations happen to initiate and colour indi-
cate operation type.
Python was the target language which has the de-
ficiency of being computationally slow, making iter-
ation through and modifying vectors detrimental. To
Figure 5: Illustration of operation scheduling, single pass
approach. Figure after (Bryce, 2023).
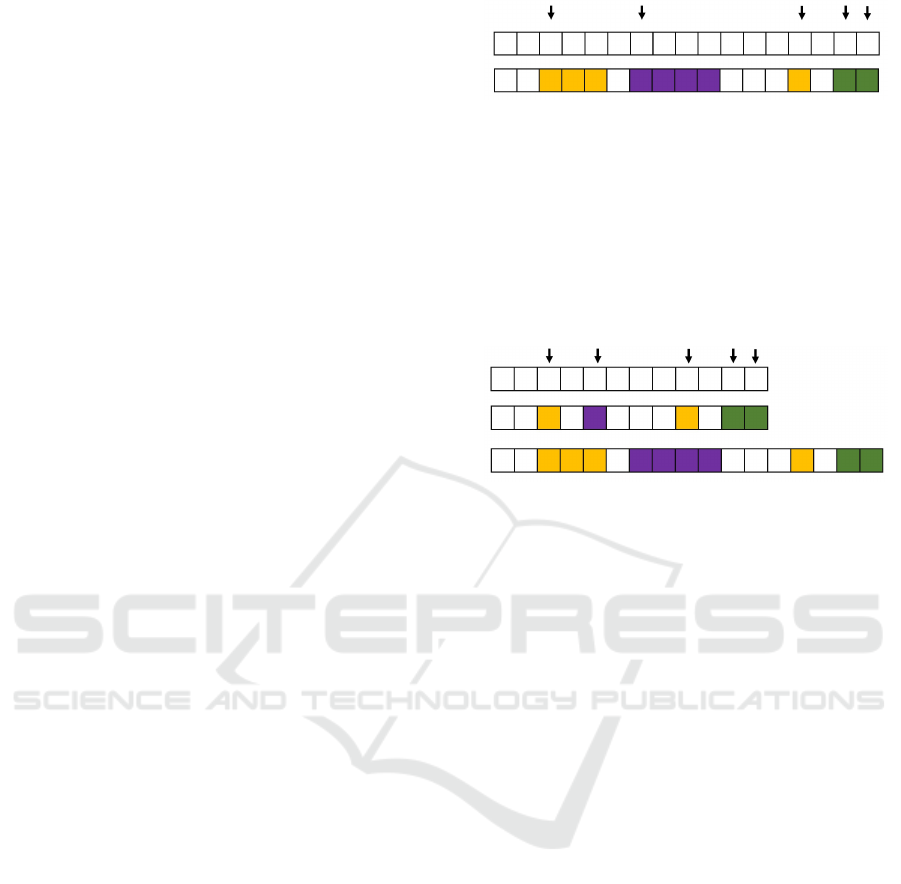
address this we consider the equivalent two pass ap-
proach where we 1) use a point process to find initi-
ation times and 2) expand, as illustrated in Figure 6.
Nominally a two pass approach is worse than a sin-
gle pass, as looping itself and memory operations are
slow in Python, but we can creatively make imple-
mentation choices to mitigate these slow operations.
Figure 6: Illustration of operation scheduling, two pass ap-
proach. Figure after (Bryce, 2023).
In detail, the first pass uses the random
choice distribution, drawing ≈ T /∆t numbers
from [0,1,. .., i,...,K] with appropriate probabilities,
where i = 1,. ..,K indicates the ith operation of K to-
tal while zero denotes no operation, T is the nom-
inal time horizon, and ∆t is the discrete timestep.
This can be done using a library (e.g., using NumPy’s
numpy.random.choice), which will be fast. The sec-
ond pass expands by suitable durations where we do
not actually fill in the timeline and expand. Rather, we
take our vector, say v = [0,1,0,0,5,1,0, ...],
and find where this is non-zero (in pseudo-code,
idx=which(v > 0)). We then build a table, with
the operation type given by v[idx], start times given
by idx, and suitably drawn durations. We then ex-
pand and makes ergodic via the approach outlined
here, working on the table. This approach accounts
for Python’s characteristic strengths and weaknesses,
and has the advantage of eliminating the identifica-
tion problem where back-to-back operations cannot
be identified (such as the final two operation instances
in Figure 6), which is a concern if counting operations
or if tempo depends on time within an operation.
Finite Interval Processes: Simulating Military Operations
363
