
Region-Transformer: Self-Attention Region Based Class-Agnostic Point
Cloud Segmentation
Dipesh Gyawali, Jian Zhang and Bijaya B. Karki
School of Electrical Engineering and Computer Science, Louisiana State University, Baton Rouge, LA 70803, U.S.A.
Keywords:
3D Vision, Class-Agnostic Segmentation, Self-Attention, Point Cloud, Region-Growth.
Abstract:
Point cloud segmentation, which helps us understand the environment of specific structures and objects, can
be performed in class-specific and class-agnostic ways. We propose a novel region-based transformer model
called Region-Transformer for performing class-agnostic point cloud segmentation. The model utilizes a
region-growth approach and self-attention mechanism to iteratively expand or contract a region by adding or
removing points. It is trained on simulated point clouds with instance labels only, avoiding semantic labels.
Attention-based networks have succeeded in many previous methods of performing point cloud segmenta-
tion. However, a region-growth approach with attention-based networks has yet to be used to explore its
performance gain. To our knowledge, we are the first to use a self-attention mechanism in a region-growth
approach. With the introduction of self-attention to region-growth that can utilize local contextual information
of neighborhood points, our experiments demonstrate that the Region-Transformer model outperforms pre-
vious class-agnostic and class-specific methods on indoor datasets regarding clustering metrics. The model
generalizes well to large-scale scenes. Key advantages include capturing long-range dependencies through
self-attention, avoiding the need for semantic labels during training, and applicability to a variable number of
objects. The Region-Transformer model represents a promising approach for flexible point cloud segmenta-
tion with applications in robotics, digital twinning, and autonomous vehicles.
1 INTRODUCTION
Point cloud segmentation is an imperative technique
to understand 3D surroundings and objects, with ap-
plications in robotics (Ling et al., 2021), automation
(Chen et al., 2021b), digital twinning (Mirzaei et al.,
2022), VR/AR (Placitelli and Gallo, 2011). Most
existing methods perform class-specific segmentation
(Qi et al., 2017a) (Qi et al., 2017b) (Yang et al., 2019)
(Zhao et al., 2021a) requiring semantic labels. How-
ever, class-agnostic segmentation without prior object
knowledge is more flexible yet challenging.
Recently, self-attention networks (Zhao et al.,
2021a) have shown promise for point cloud tasks by
capturing contextual information. And region-growth
approaches enable adaptive segmentation determina-
tion. However, self-attention has not been explored
to enhance region-based segmentation. Our key in-
sight is combining self-attention with region-growth
can improve class-agnostic point cloud segmentation.
We propose a Region-Transformer model, which
utilizes self-attention in local neighborhoods to itera-
tively expand/contract segments by adding/removing
points likely belonging to the same instance. This
model provides two key advantages over previous
methods: 1) Attention on local regions captures finer
relationships versus global context, and 2) Region
growth allows flexible segmentation boundaries using
neighborhood information. Our experimental stud-
ies show that Region-Transformer significantly out-
performs previous class-specific and class-agnostic
methods and thus demonstrate the benefits of our pro-
posed approach.
In this work, our main contribution includes the
following.
• We leverage the power of the self-attention mech-
anism combined with the region-growing ap-
proach to segment an environment ranging from
small-scale to large-scale data completely.
• We don’t need semantic labels to train the model
that provides flexibility in segmenting any number
of objects in an environment.
• We capture local contextual information for each
point inside a region that helps identify long-range
point cloud data dependencies.
Gyawali, D., Zhang, J. and Karki, B.
Region-Transformer: Self-Attention Region Based Class-Agnostic Point Cloud Segmentation.
DOI: 10.5220/0012424500003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 4: VISAPP, pages
341-348
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
341

2 RELATED WORKS
Research in point cloud segmentation has primar-
ily focused on semantic and instance segmentation.
Semantic segmentation classifies each point within
3D data, while instance segmentation assigns points
to a specific instance without class labels. Class-
specific segmentation has been more extensively stud-
ied than challenging class-agnostic segmentation in
varied real-world environments.
Point cloud data features range from XYZ posi-
tions to geometric aspects like normals and curva-
tures. Techniques for analyzing these features include
patch stitching and octree-based hierarchical repre-
sentations (Gumhold et al., 2001) (Guo et al., 2015)
(Wang and Yuan, 2010) (Zhou et al., 2021) (Zhao
et al., 2019). (Nguyen and Le, 2013) discuss datasets
and methodologies for point cloud segmentation.
Deep learning has emerged as a significant
method for 3D point cloud segmentation, with ap-
proaches including projection-based, discretization-
based, point-based, and proposal-based methods
(Ahn et al., 2022) (Qi et al., 2017a) (Guo et al., 2020).
(Guo et al., 2020) further explore neural networks for
3D tracking, shape classification, detection, and seg-
mentation.
Few-shot learning, neighborhood information,
and class-agnostic approaches are also being explored
for segmentation (Zhao et al., 2021b) (Engelmann
et al., 2019) (Nunes et al., 2022) (Sharma et al.,
2020). Unsupervised methods and region-growing
approaches address segmentation without labels, fo-
cusing on features and iterative calculations (Xiao
et al., 2023) (Kang et al., 2020) (Chen et al., 2021a).
Recently, transformers have been applied to point
cloud data, leveraging their success in NLP and Com-
puter Vision (Gyawali, 2023) (Zhao et al., 2021a).
Our research combines self-attention mechanisms
with region-growing approaches for class-agnostic
segmentation, utilizing the transformer architecture’s
adaptability to varying input data. Consequently, ap-
plying self-attention operations to 3D data is a logi-
cal choice, given that point clouds are collections of
points within 3D space.
3 METHODOLOGY
The methodology includes problem formulation,
point transformer block, interaction of self-attention
and region growth, data preparation and inference.
3.1 Problem Definition and Formulation
We formulate point cloud segmentation as an itera-
tive region-growing problem using a learned neural
network function f. Given a point cloud P with N
points represented by F features, the goal is to assign
an instance label L to every point. The region-growth
starts from a seed point p
seed
∈ P and progressively
adds points P
*
⊂ P belonging to the same instance
to expand the region. At each step, f transforms the
input points C
k
to output points C
k+1
. Initially, C
0
= p
seed
, until C → P
*
, indicating the full instance is
segmented. The point cloud has 13 features, includ-
ing XYZ positions, RGB colors, normals, and cur-
vatures. Normals and curvatures are computed using
PCA (Asao and Ike, 2022) on local neighborhoods.
Room dimensions also normalize XYZ coordinates.
In total, each point is represented by a 13D feature
vector.
3.2 Network Architecture
The core component of the network architecture is
the point transformer (Zhao et al., 2021a), a neural
network designed to capture both local and global
contextual information of each point, considering its
neighboring points. This information is crucial in
determining whether neighboring points should be
included or excluded in the segmentation process.
As shown in Figure 1, the network consists of two
branches - an inlier branch and a neighbor branch
- which receive inputs of inlier and neighbor point
sets. The sets pass through encoder blocks B1 and
B2 to generate latent feature vectors per set. The con-
catenated vectors are broadcasted and decoded by B3
(Chen et al., 2021a).
The Point Transformer block facilitates the ex-
change of information between localized feature vec-
tors, allowing adaptation to spatial arrangements and
features in 3D space. The core Point Transformer
layer utilizes a self-attention mechanism to relate each
point to its local neighborhood points, as shown in
Figure 2. This captures contextual information to de-
termine whether to include or exclude points during
segmentation.
The Point Transformer layer captures each point’s
local and global contextual information by consider-
ing its neighboring points. For this, the layer utilizes a
self-attention mechanism. Specifically, self-attention
is applied locally within a predefined neighborhood
(e.g., k-nearest neighbors) around each point. This
allows focusing on and aggregating features from
the most related subset of neighbors(16) rather than
all points. The self-attention procedure uses map-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
342
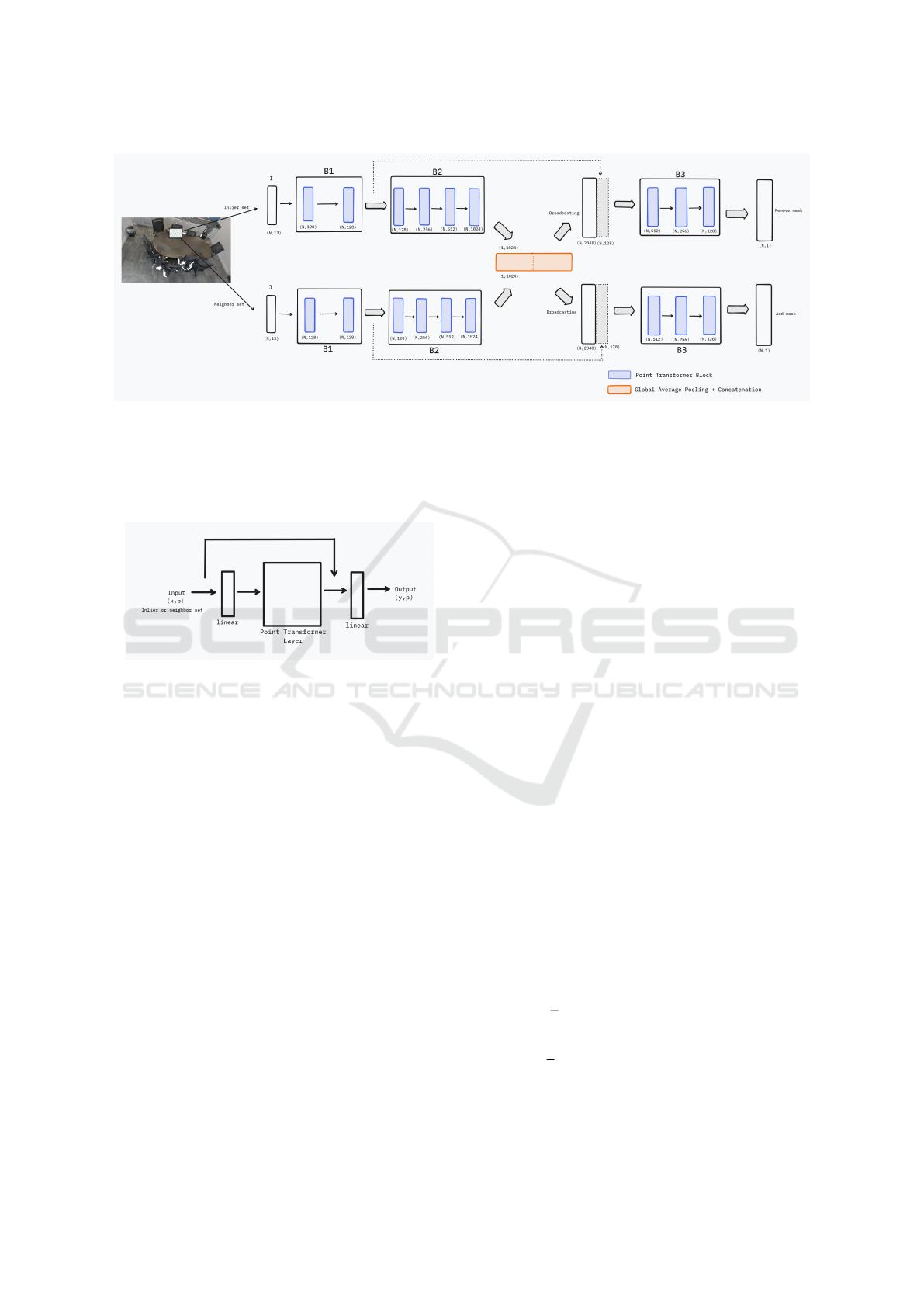
Figure 1: Region-Transformer network architecture for class-agnostic segmentation. Block B1 generating (128,128) fea-
tures and B2 generating (128,256,512,1024) features act as encoders for inlier and neighbor sets. Block B3 generating
(512,256,128) features acts as a decoder. Points from B1 and B2 are average-pooled, and inlier and neighbor sets are con-
catenated together to form a bottleneck. The encoded features are broadcasted into N number of points, and features from
B1 output are concatenated to broadcasted features to get positional information of each point. In the last layer, the add and
remove mask predictions are made.
Figure 2: Point Transformer Block.
per functions to transform input point features into
queries, keys, and values (Vaswani et al., 2023). At-
tention weights between the query and keys are cal-
culated. These attention weights determine how much
each value vector contributes to the output aggregated
feature for the central point. In addition, a relative
positional encoding δ is applied to retain positional
information of each point in the 3D space. This en-
coding uses a parameterized function of the difference
between point coordinates given as
δ = β(p
i
− p
j
) (1)
where p
i
and p
j
represent 3D position values for
points i and j, and β represents three fully connected
layers with two nonlinear ReLU in between. The
point transformer is based on self vector-attention
(Zhao et al., 2020) given as
y
i
=
∑
x
j
∈X(i)
ρ(γ(ϕ(x
i
)−ψ(x
j
)+δ))⊙(α(x
j
)+δ) (2)
The self-attention procedure is defined in Equa-
tion 2, where ϕ, ψ, α transform input features, ρ
normalizes, δ encodes position, and γ maps attention
weights to aggregate features. X (i) ⊂ X represents the
local neighborhood of point x
i
. Self-attention is ap-
plied to each point’s neighborhood to focus on simi-
lar local regions rather than global contexts. The map-
per γ uses multilayer perceptrons to generate attention
weights.
The output is a new feature vector for each point
with selectively aggregated contextual information
from its local neighborhood. These features can bet-
ter determine relationships between nearby points to
aid the region segmentation process. The ability of
self-attention to capture dependencies based on fea-
ture similarity rather than spatial proximity helps the
region grow according to semantic instance bound-
aries. The localization also allows finer segmentation
precision.
3.3 Self-Attention in Region-Growth
Our method includes encoder-decoder network which
is trained to learn effective region-growth with a bi-
nary cross-entropy loss on the addition and removal
predictions. The loss compares predicted point inclu-
sion/exclusion probabilities with ground truth labels
given as
L = −
1
I
I
∑
1
[x
i
log ˆx
i
+ (1 − x
i
)log (1 − ˆx
i
)]
−
1
J
J
∑
1
[y
j
log ˆy
j
+ (1 − y
j
)log (1 − ˆy
j
)]
(3)
Our key insight enabling improved segmentation
performance is using self-attention within the context
Region-Transformer: Self-Attention Region Based Class-Agnostic Point Cloud Segmentation
343

of iterative, neural network-guided region-growth.
Local point neighborhoods are defined around seed
points using a radius threshold. Self-attention is
applied to every neighborhood, enabling each point
to aggregate features from its local context. It
captures nuanced geometric relationships between a
point and its neighbors that standard features miss.
This higher-order feature representation is input to
the Point Transformer network to predict iterative
growth decisions. So self-attention does the ”heavy
lifting” to equip the network with finer-grained neigh-
borhood characterization for superior growth pre-
dictions. The Point Transformer network analyzes
attention-enhanced local features to predict binary
masks, indicating which neighborhood points should
be added/removed to grow the region. Based on these
iterative add/remove decisions, new local neighbor-
hoods are extracted around the grown region’s up-
dated seed points. Self-attention and neural feature
processing are repeated in the new neighborhoods,
further evolving the regions to capture more points
belonging to the same instance.
The key novelty is using the neural predictions
from intermediate attention-augmented features to ac-
tively determine how regions evolve rather than re-
lying solely on hand-crafted similarity metrics. This
dynamic interaction helps address limitations of both
attention and region growth in isolation.
3.4 Data Preparation and Simulation
The S3DIS (Armeni et al., 2017) and Scannet (Dai
et al., 2017) datasets containing point cloud labels
generate simulated training data. The simulation fol-
lows a region-growth approach based on (Chen et al.,
2021a) with PyTorch implementation. Data augmen-
tation is applied, including random flipping, rotation,
and introducing mistake probability(θ) noise. 844
million point clouds from 3.5 million instances are
generated as S3DIS training data, in addition to 17
million validation sets. Similarly, 741 million point
clouds from 5.0 million instances are generated as
Scannet training sets. The simulation grows regions
starting from random seed points, iteratively aggre-
gating nearby points sharing the same instance label.
Noise is gradually reduced over the region growth
iterations to promote convergence while preventing
overfitting. This process creates training data mim-
icking realistic instance segmentations. The valida-
tion data evaluates generalization. Each instance is
unique despite identical class labels. The approach
synthesizes sufficiently large and diverse labeled data
for effectively learning the region growth transforma-
tions.
3.5 Inference
The inference technique and conditions are derived
from (Chen et al., 2021a). During inference, seg-
mentation is performed by iteratively adding and re-
moving points from an initial seed region until all
points are labeled. The trained transformer network
outputs addition and removal predictions to grow re-
gions. The process continues until one termination
criteria:
• No neighboring points are remaining to be as-
signed to the region.
• The points set to be added are empty.
• There is no expansion of region for two consecu-
tive steps.
On termination, the final region is assigned an in-
stance label and then reset with a new seed. Seeds are
strategically selected as the point with the lowest cur-
vature for consistency (Dimitrov and Golparvar-Fard,
2015). For robustness, segments with few points (less
than 8) do not form new instances. Instead, points
adopt the label of nearest neighbors. This prevents
the loss of points between larger segmented instances
(Hu et al., 2019) (Xie et al., 2021).
In summary, inference progressively segments the
point cloud into instance-labeled regions by learned
prediction of what points to add/remove at each itera-
tion. Termination and seed selection strategies maxi-
mize completeness, consistency, and efficiency.
4 EXPERIMENTS AND RESULTS
The Region-Transformer model was tested for seg-
mentation on indoor (S3DIS, Scannet) and outdoor
scenes, using clustering metrics (ARI, AMI, NMI)
and general metrics (mean IOU, Precision, Recall).
Comparisons were made with class-agnostic and
class-specific segmentation methods. Implemented in
Pytorch, the model used Adam Optimizer, which was
trained over 90 epochs on NVIDIA RTX A6000 GPU,
and the training took about seven days.
The study conducted extensive experiments to
evaluate the Region-Transformer, comparing it
against previous segmentation methods using the
S3DIS and ScanNet datasets. These datasets repre-
sent different environments: S3DIS focuses on of-
fice settings, while ScanNet covers home environ-
ments. This diverse testing revealed that the Region-
Transformer excelled over other methods across al-
most every metric, as shown in Tables 1 and 2.
A significant aspect of this success is attributed
to the model’s use of local neighborhood informa-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
344
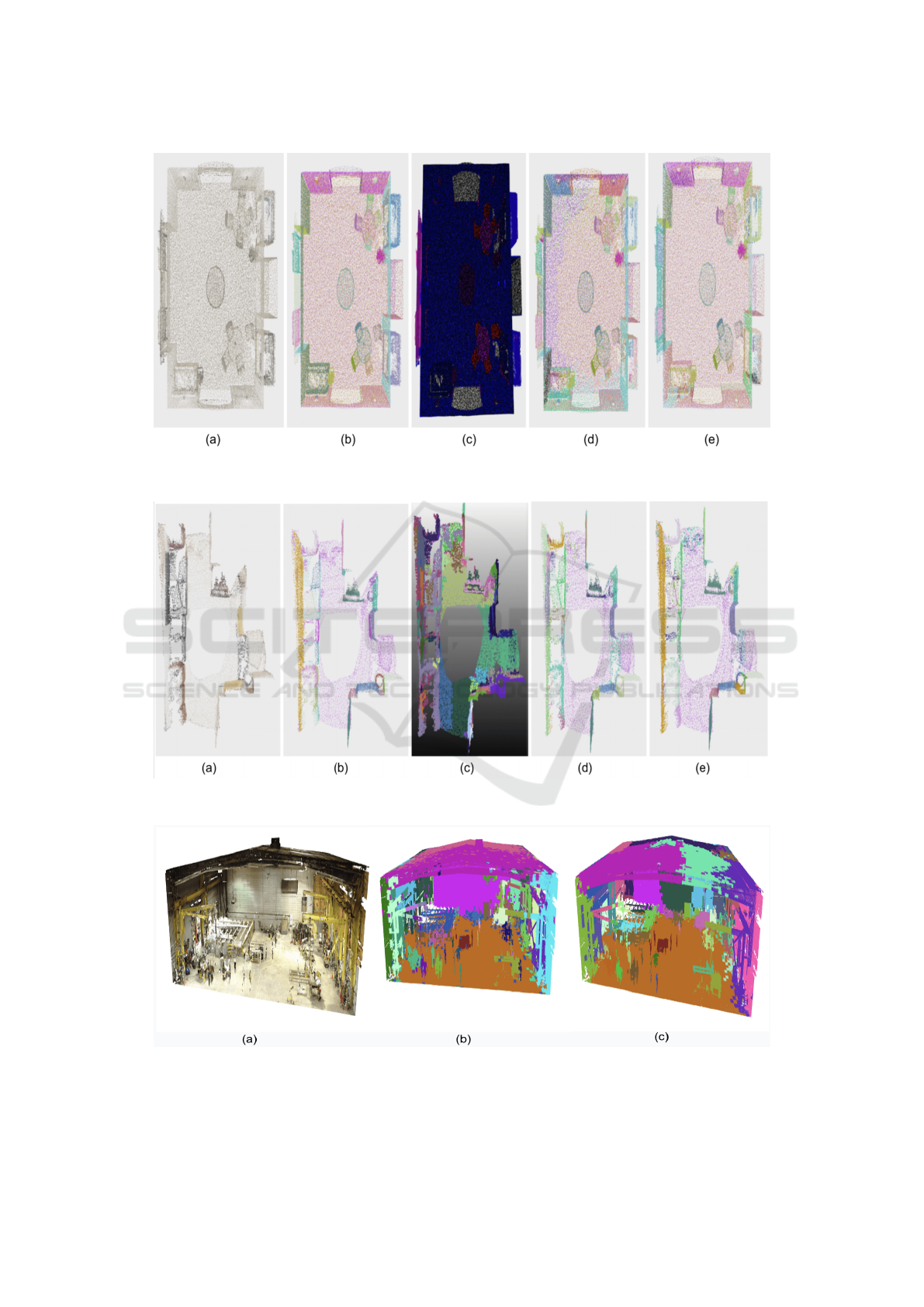
Figure 3: Object-agnostic segmentation results across Scannet a) Raw point cloud original visualization (b) Ground truth
original segmentation (c) PointNet++ segmentation (d) LRGNet segmentation (e) Region-Transformer (Our Method).
Figure 4: Object-agnostic segmentation results across S3DIS a)Raw point cloud original visualization (b) Ground-truth orig-
inal segmentation(c) PointNet++ segmentation (d) LRGNet segmentation (e) Region-Transformer (Our Method).
Figure 5: Object-agnostic Segmentation results on real-world, large-scale factory data a) Raw point cloud original visualiza-
tion (b) LRGNet segmentation (c) Region-Transformer (Our Method).
Region-Transformer: Self-Attention Region Based Class-Agnostic Point Cloud Segmentation
345
Table 1: Comparison between models using Scannet as training and S3DIS as test.
Type Method ARI AMI NMI Precision Recall mIoU
class-
dependent
PointNet (Qi et al., 2017a) 0.38 0.48 0.58 0.18 0.17 0.25
PointNet++ (Qi et al., 2017b) 0.40 0.56 0.62 0.15 0.22 0.31
3D-BoNet (Yang et al., 2019) 0.68 0.72 0.75 0.20 0.29 0.35
JSIS3D (Pham et al., 2019) 0.63 0.73 0.74 0.28 0.29 0.36
Point Transformer (Zhao et al., 2021a) 0.69 0.73 0.75 0.44 0.44 0.47
class-
independent
FPFH (Rusu et al., 2009) 0.39 0.60 0.62 0.14 0.25 0.32
Region growing 0.59 0.70 0.71 0.19 0.34 0.38
Rabbani et.al (Rabbani et al., 2006) 0.62 0.71 0.72 0.17 0.31 0.36
LRGNet (Chen et al., 2021a) 0.67 0.74 0.75 0.25 0.41 0.43
LRGNet+ local search (Chen et al., 2021a) 0.68 0.75 0.76 0.34 0.44 0.45
Region-Transformer 0.79 0.85 0.86 0.63 0.66 0.62
Table 2: Comparison between models using S3DIS as training and Scannet as test.
Type Method ARI AMI NMI Precision Recall mIoU
class-
dependent
PointNet (Qi et al., 2017a) 0.40 0.51 0.57 0.08 0.13 0.26
PointNet++ (Qi et al., 2017b) 0.47 0.57 0.63 0.15 0.21 0.32
3D-BoNet (Yang et al., 2019) 0.34 0.54 0.59 0.10 0.13 0.24
JSIS3D (Pham et al., 2019) 0.31 0.56 0.57 0.15 0.13 0.22
Point Transformer (Zhao et al., 2021a) 0.56 0.69 0.70 0.33 0.34 0.38
class-
independent
FPFH (Rusu et al., 2009) 0.28 0.51 0.53 0.10 0.14 0.26
Region growing 0.44 0.60 0.62 0.17 0.23 0.30
Rabbani et.al (Rabbani et al., 2006) 0.49 0.62 0.64 0.13 0.24 0.32
LRGNet (Chen et al., 2021a) 0.54 0.67 0.69 0.25 0.33 0.39
LRGNet+ local search (Chen et al., 2021a) 0.56 0.68 0.69 0.31 0.33 0.38
Region-Transformer 0.61 0.70 0.72 0.25 0.39 0.43
tion combined with a self-attention mechanism. This
approach was particularly effective compared to lo-
cal search techniques like those in LRGNet (Chen
et al., 2021a). The research underscores the advan-
tage of applying the self-attention mechanism in a
region-based, class-agnostic approach for point cloud
segmentation. Unlike methods trained with seman-
tic label information that showed diminished per-
formance when applied to a different dataset, the
Region-Transformer demonstrated robust generaliza-
tion capabilities.
Regarding specific evaluation metrics, the Nor-
malized Mutual Information(NMI) metric assesses
the similarity between two clusters, with a value
range of 0 to 1. A high NMI score for the Region-
Transformer indicates a reduction in the entropy of
instance labels and an improvement in the under-
segmentation of instance labels. The method’s high
NMI is attributed to its ability to predict pure clusters
that closely match the ground truth. Similar to NMI
but adjusted for random chance, AMI ranges from -1
to 1. The Region-Transformer scored high on AMI,
signifying its efficiency in creating pure clusters and
solving over-segmentation problems. AMI accounts
for the number of clusters and dataset size, discount-
ing chance normalization. From -1 to 1, ARI is re-
lated to accuracy in measuring the percentage of cor-
rect predictions. It corrects for a change from the rand
index and is particularly useful for considering unbal-
anced clustering.
The paper emphasizes that while NMI and AMI
are effective for evaluating clustering purity and sim-
ilarity, they have limitations. For instance, NMI can
increase with the number of clusters regardless of ac-
tual mutual information. Similarly, AMI might be bi-
ased towards unbalanced clustering solutions. Hence,
including ARI as a metric provides a more compre-
hensive and balanced evaluation.
In the qualitative evaluation, the Region-
Transformer demonstrates marked improvements
in segmenting indoor scenes, as shown in Figures
3 and 4. It effectively resolves under-segmentation
on smooth surfaces like floors and accurately distin-
guishes objects of varying shapes and sizes. However,
challenges arise in wall segmentation due to uneven
surfaces and corner over-segmentation. Despite
these issues, its performance in differentiating unique
instances in environments like the S3DIS indoor
scenes is notable.
The model’s adaptability to large-scale scenes is
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
346

Table 3: Computation Time analysis (seconds).
Method Minimum Average Maximum
Region growing 0.4 4.8 18.6
PointNet (Qi et al., 2017a) 0.1 0.6 2.5
PointNet++ (Qi et al., 2017b) 0.1 0.9 3.5
Rabbani et.al (Rabbani et al., 2006) 0.3 4.6 18.3
3D-BoNet (Yang et al., 2019) 1.5 14.1 69.3
FPFH (Rusu et al., 2009) 0.5 4.6 17.8
LRGNet (Chen et al., 2021a) 0.8 64.9 620.9
JSIS3D (Pham et al., 2019) 1.0 539.2 16713.9
Region-Transformer 1.5 57.4 311.5
a key strength. Initially trained on homes and of-
fices, the Region-Transformer shows remarkable ca-
pability in segmenting larger environments, including
factories and large buildings, as illustrated in Figure
5. This is essential for applications in self-driving
cars and digital twinning, demonstrating its practical
utility in handling complex, large-scale environments
without prior object knowledge in general.
Furthermore, the Region-Transformer signifi-
cantly improves computational efficiency, particularly
in inference time, compared to other class-agnostic,
region-based segmentation approaches. Despite the
iterative nature of its process, it maintains better effi-
ciency, a finding supported by the average inference
time analysis of 50 S3DIS datasets presented in Table
3. This balance of accuracy and computational speed
makes it suitable for real-time applications, highlight-
ing its potential in accuracy and efficiency.
5 CONCLUSIONS
We propose a novel region-based transformer model
called Region-Transformer for performing class-
agnostic point cloud segmentation. Experiments
demonstrate that combining self-attention with an
iterative region-growing approach significantly im-
proves segmentation performance. Specifically, at-
tention mechanisms effectively capture local contex-
tual relationships between points missed by previous
region growth methods. Key advantages of the pro-
posed approach include:
• Attention on local point neighborhoods enables
capturing finer feature relationships versus global
context. This aids in precisely determining seg-
mentation boundaries.
• The region growth formulation allows flexible,
adaptive segmentation based on progressively
learned point neighborhood relationships, avoid-
ing strong assumptions.
• The method avoids dependence on semantic class
labels, enabling new object segmentation.
The promising performance and flexibility of
Region-Transformer represent an important step to-
ward practical point cloud segmentation without prior
knowledge. Potential real-world applications span
robotic perception, autonomous navigation, digital
twinning, and augmented reality.
Future avenues for improving Region-
Transformer include reducing training and inference
times via model compression techniques tailored for
transformers. New spatial attention operators could
also be designed to capture geometric relationships
in point clouds. An exciting research direction
involves extending the approach to perform video
segmentation on dynamic point cloud sequences
containing moving objects.
ACKNOWLEDGEMENTS
This project is supported in part by NSF grant OIA-
1946231 and NASA. We are grateful to Mr. Marc
Aubanel for his feedback and providing data for this
research.
REFERENCES
Ahn, P., Yang, J., Yi, E., Lee, C., and Kim, J. (2022).
Projection-based point convolution for efficient point
cloud segmentation. IEEE Access, 10:15348–15358.
Armeni, I., Sax, A., Zamir, A. R., and Savarese, S. (2017).
Joint 2d-3d-semantic data for indoor scene under-
standing. ArXiv e-prints.
Asao, Y. and Ike, Y. (2022). Curvature of point clouds
through principal component analysis.
Chen, J., Kira, Z., and Cho, Y. K. (2021a). Lrgnet: Learn-
able region growing for class-agnostic point cloud
segmentation. IEEE Robotics and Automation Letters,
6(2):2799–2806.
Region-Transformer: Self-Attention Region Based Class-Agnostic Point Cloud Segmentation
347

Chen, S., Liu, B., Feng, C., Vallespi-Gonzalez, C., and
Wellington, C. (2021b). 3d point cloud processing and
learning for autonomous driving: Impacting map cre-
ation, localization, and perception. IEEE Signal Pro-
cessing Magazine, 38(1):68–86.
Dai, A., Chang, A. X., Savva, M., Halber, M., Funkhouser,
T., and Nießner, M. (2017). Scannet: Richly-
annotated 3d reconstructions of indoor scenes. In
Proc. Computer Vision and Pattern Recognition
(CVPR). IEEE.
Dimitrov, A. and Golparvar-Fard, M. (2015). Segmentation
of building point cloud models including detailed ar-
chitectural/structural features and mep systems. Au-
tomation in Construction, 51(C):32–45. Publisher
Copyright: © 2014 Elsevier B.V. All rights reserved.
Engelmann, F., Kontogianni, T., Schult, J., and Leibe, B.
(2019). Know what your neighbors do: 3d semantic
segmentation of point clouds, page 395–409. Springer
International Publishing.
Gumhold, S., Wang, X., and Macleod, R. (2001). Feature
extraction from point clouds. In International Mesh-
ing Roundtable Conference.
Guo, Y., Bennamoun, M., Sohel, F., Lu, M., Wan, J., and
Kwok, N. (2015). A comprehensive performance
evaluation of 3d local feature descriptors. Interna-
tional Journal of Computer Vision, 116.
Guo, Y., Wang, H., Hu, Q., Liu, H., Liu, L., and Ben-
namoun, M. (2020). Deep learning for 3d point
clouds: A survey.
Gyawali, D. (2023). Lrtransformer: Learn-region trans-
former for object-agnostic point cloud segmentation.
Master’s thesis, Louisiana State University.
Hu, P., Held, D., and Ramanan, D. (2019). Learning to
optimally segment point clouds.
Kang, C. L., Wang, F., Zong, M. M., Cheng, Y., and Lu,
T. N. (2020). Research on improved region growing
point cloud algorithm. The International Archives of
the Photogrammetry, Remote Sensing and Spatial In-
formation Sciences, XLII-3/W10:153–157.
Ling, C. F., Dang, S. W., Zhang, C. Y., and Chen, Y. (2021).
Research and application of semantic point cloud on
indoor robots. In 2021 5th International Conference
on Communication and Information Systems (ICCIS),
pages 108–113.
Mirzaei, K., Arashpour, M., Asadi, E., et al. (2022). Auto-
matic generation of structural geometric digital twins
from point clouds. Sci Rep, 12:22321.
Nguyen, A. and Le, B. (2013). 3d point cloud segmentation:
A survey. In 2013 6th IEEE Conference on Robotics,
Automation and Mechatronics (RAM), page 225–230.
Nunes, L., Chen, X., Marcuzzi, R., Osep, A., Leal-Taixe,
L., and Stachniss, C. (2022). 3d point cloud clustering
with learnable robust geometric constraints.
Pham, Q.-H., Nguyen, D. T., Hua, B.-S., Roig, G., and
Yeung, S.-K. (2019). Jsis3d: Joint semantic-instance
segmentation of 3d point clouds with multi-task point-
wise networks and multi-value conditional random
fields.
Placitelli, A. P. and Gallo, L. (2011). Low-cost augmented
reality systems via 3d point cloud sensors. In 2011
Seventh International Conference on Signal Image
Technology & Internet-Based Systems, pages 188–
192.
Qi, C. R., Su, H., Mo, K., and Guibas, L. J. (2017a). Point-
net: Deep learning on point sets for 3d classification
and segmentation.
Qi, C. R., Yi, L., Su, H., and Guibas, L. J. (2017b). Point-
net++: Deep hierarchical feature learning on point sets
in a metric space.
Rabbani, T., van den Heuvel, F., and Vosselman, G. (2006).
Segmentation of point clouds using smoothness con-
straints. In Maas, H. and Schneider, D., editors, IS-
PRS 2006 : Proceedings of the ISPRS commission V
symposium, volume 35, pages 248–253. International
Society for Photogrammetry and Remote Sensing (IS-
PRS). ISPRS commission V symposium : image.
Rusu, R. B., Blodow, N., and Beetz, M. (2009). Fast point
feature histograms (fpfh) for 3d registration. In 2009
IEEE International Conference on Robotics and Au-
tomation, pages 3212–3217.
Sharma, A., Khan, N., Sundaramoorthi, G., and Torr, P.
(2020). Class-agnostic segmentation loss and its ap-
plication to salient object detection and segmentation.
Vaswani, A., Shazeer, N., Parmar, N., Uszkoreit, J., Jones,
L., Gomez, A. N., Kaiser, L., and Polosukhin, I.
(2023). Attention is all you need.
Wang, L. and Yuan, B. (2010). Curvature and density
based feature point detection for point cloud data. In
IET 3rd International Conference on Wireless, Mo-
bile and Multimedia Networks (ICWMNN 2010), page
377–380.
Xiao, A., Huang, J., Guan, D., Zhang, X., Lu, S., and Shao,
L. (2023). Unsupervised point cloud representation
learning with deep neural networks: A survey. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, pages 1–20.
Xie, C., Xiang, Y., Mousavian, A., and Fox, D. (2021). Un-
seen object instance segmentation for robotic environ-
ments.
Yang, B., Wang, J., Clark, R., Hu, Q., Wang, S., Markham,
A., and Trigoni, N. (2019). Learning object bounding
boxes for 3d instance segmentation on point clouds.
Zhao, H., Jia, J., and Koltun, V. (2020). Exploring self-
attention for image recognition.
Zhao, H., Jiang, L., Jia, J., Torr, P., and Koltun, V. (2021a).
Point transformer.
Zhao, N., Chua, T.-S., and Lee, G. H. (2021b). Few-shot 3d
point cloud semantic segmentation.
Zhao, R., Pang, M., Liu, C., and Zhang, Y. (2019). Robust
normal estimation for 3d lidar point clouds in urban
environments. Sensors, 19(5).
Zhou, J., Jin, W., Wang, M., Liu, X., Li, Z., and Liu, Z.
(2021). Fast and accurate normal estimation for point
cloud via patch stitching.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
348
