
A Framework for Studying Communication Pathways in Machine
Learning-Based Agent-to-Agent Communication
Sathish Purushothaman, Michael Granitzer, Florian Lemmerich and Jelena Mitrovic
University of Passau, Germany
{sathish.purushothaman, michael.granitzer, florian.lemmerich, jelena.mitrovic}@uni-passau.de
Keywords:
Multi-Agent Learning, Deep Neural Networks, Language Emergence.
Abstract:
The rise of Large Language Models (LLMs) has increased the relevance of agent-to-agent communication, par-
ticularly in systems where agents learn from their interactions. However, current LLMs offer limited insights
into the communication dynamics among multiple agents, especially in large-scale settings when multiple
agents are involved. Particularly training LLMs - in contrast to in-context learning - becomes nearly infeasible
without large-scale computing infrastructure. In our work we present a machine-learning based agent frame-
work to investigate the role of different communication pathways for studying language emergence between
machine learning-based agents. We designed a transformer-based image auto-encoder as the agent architec-
ture. A Gumbel SoftMax layer encodes images in form of symbols forming the language between agents.
We study two pathways: In the first pathway, the sender reads an image and sends a message to the receiver.
The receiver uses the message to reconstruct the sender’s image. In the second pathway, the sender and re-
ceiver read an image and minimize the distance between the generated symbols. In the first pathway, language
emerges with the Levenshtein distance of ≤ 2 for 96% of messages. In the second pathway, no language
emerges with the Levenshtein distance of ≤ 2 for 3% of messages.
1 INTRODUCTION
In the deep learning era, the study of emergent com-
munication (Lazaridou and Baroni, 2020) explores
how intelligent, machine learning-based agents in-
teract to address specific problems. Large language
models (LLMs) have demonstrated a form of agency
(Wu et al., 2023) and the ability to learn from one
another (Dubois et al., 2023). However, findings in
this area tend to be more anecdotal or algorithmi-
cally derived rather than conceptual. Moreover, the
expansive parameter space of LLMs constrains train-
ing updates, often relegating learning from commu-
nication to mere in-context adaptation. Additionally,
reliance on single models restricts the scope of insight
to various contexts of a single model, which may in-
volve interdependent contexts in contrast to engaging
multiple independent models with distinct separation
points. This limitation is particularly salient in study-
ing phenomena such as the emergence of languages
or the transfer of knowledge between agents through
language. Just as LLMs may not always convey their
”thoughts” explicitly (Turpin et al., 2023), it is plau-
sible that a singular, albeit very large, model does
not fully capture the emergent communication phe-
nomena. Thus, while LLMs exhibit the capability for
agency and inter-agent communication, they do not
constitute an ideal platform for systematically inves-
tigating agent-to-agent communication among a large
number of agents.
Therefore, we propose a small and scalable multi-
agent communication framework to study commu-
nication pathways and structures among multiple
agents. The framework consists of multiple agents,
communication pathways, and a world model defin-
ing perceptions and associations of images and asso-
ciated labels. A successful communication emerges
between two agents when a receiver agent can un-
derstand the sender agent’s message in the way the
sender intended based on the sender’s perception. A
message consists of a sequence of symbols used by
agents for communication. In our problem, we have
a set of images, their corresponding semantics, and
symbols learned by agents through communication.
In particular, two agents successfully communicate
with each other when a receiver agent can reconstruct
the image (or the semantics of the image) seen by
the sender through the sender’s message only. If both
agents can reconstruct the images using each other’s
symbols, we can conclude that a shared language be-
Purushothaman, S., Granitzer, M., Lemmerich, F. and Mitrovic, J.
A Framework for Studying Communication Pathways in Machine Learning-Based Agent-to-Agent Communication.
DOI: 10.5220/0012423500003636
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 16th International Conference on Agents and Artificial Intelligence (ICAART 2024) - Volume 1, pages 117-126
ISBN: 978-989-758-680-4; ISSN: 2184-433X
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
117
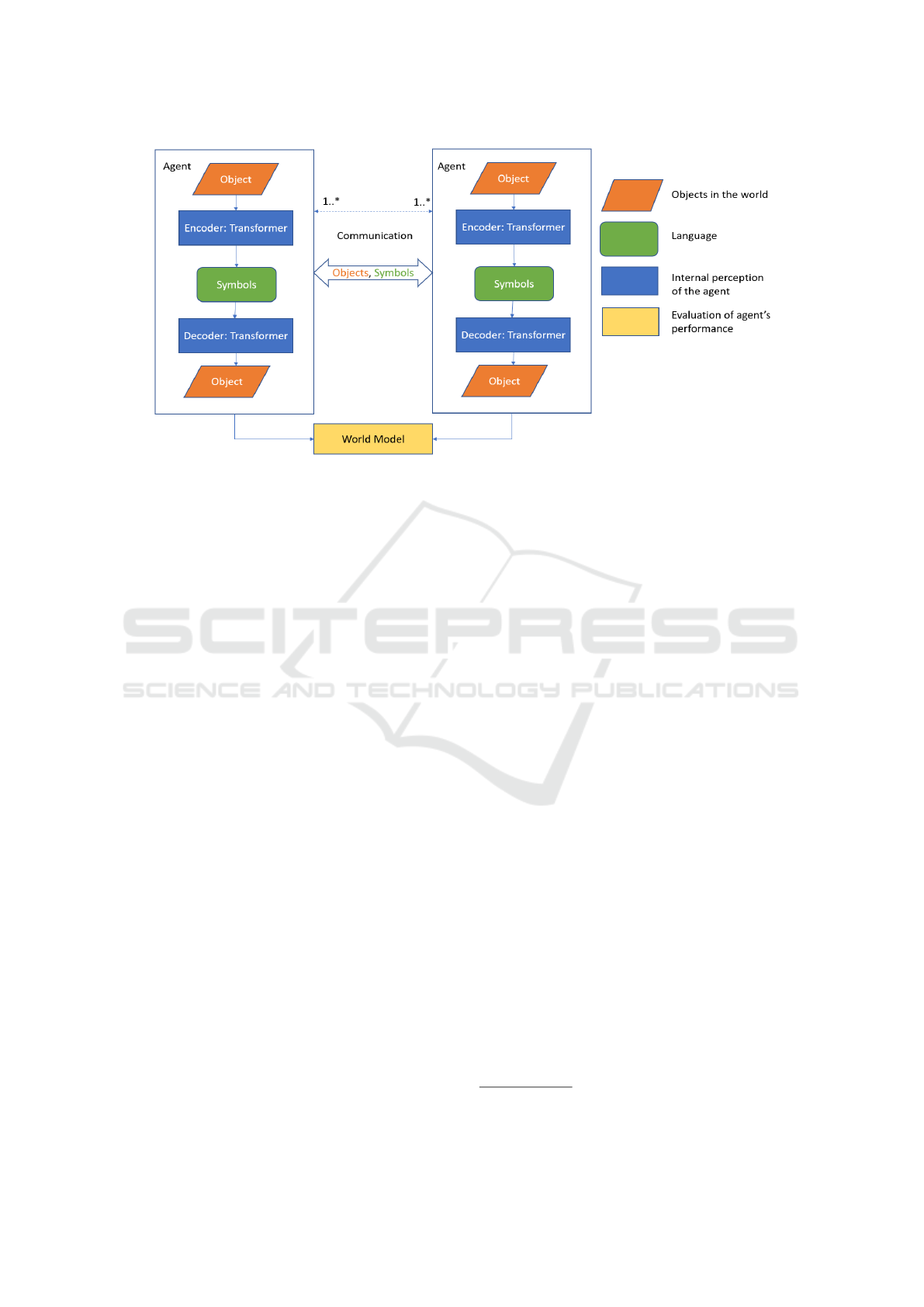
Figure 1: An agent is a transformer-based encoder-decoder architecture. The Gumbel SoftMax layer generates the symbols
of the language. Each agent can share an object and a message with another agent. The communication can be among many
agents. The communication framework allows us to study agent efficiency, convergence, and similarities under different
communication pathways.
tween the agents has emerged. We do not fix the sym-
bolic representation but let each agent learn it in an
auto-encoder-like setting.
We study two communication pathways given the
above setup. In the first communication pathway,
the agents pay attention to the receiver’s intention in-
stead of the symbol similarity. The receiver agent’s
objective is to reconstruct an image using only the
sender’s symbols. In the second communication path-
way, agents pay attention only to the similarity of
the symbols and not to the receiver’s intention. Each
agent’s objective is to develop a shared language rep-
resentation.
Given this setup, we conduct experiments to an-
swer the following research questions.
1. In the first communication pathway, does the suc-
cessful reconstruction of images based on sym-
bols shared between two agents lead to the emer-
gence of language?
2. In the second communication pathway, does the
sharing of symbols between two agents lead to the
emergence of language?
In our work, we create a transformer-based
multi-agent communication framework where mul-
tiple agents can communicate through symbols, as
shown in Figure 1. We designed the agents to rep-
resent what each agent sees in the world in a se-
quence of symbols (e.g., image to text) and represent
what it hears in objects in the world (e.g., text to im-
age). Symbols impose a discrete bottleneck in com-
munication. Agents reuse the same symbols to repre-
sent an infinite combination of objects in the world.
The agents communicate with each other through a
symbolic layer implemented using Gumbel SoftMax
(Jang et al., 2017). The objective function is to mini-
mize the mean squared error over the two agent mes-
sages and the binary cross entropy between the orig-
inal and reconstructed image. We provide a world
model which validates the performance of each agent.
Our results indicate that agents can develop a
shared language within the Levenshtein distance of
2. The receiver agent can reconstruct the image using
the symbols communicated by the sender agent. The
structural similarity index measure (SSIM) between
the sender’s perceived image and the receiver’s recon-
structed image is 0.60. Our shared code is located in
the github repository
1
.
2 RELATED WORK
The study of emergent language using deep learn-
ing in a multi-agent setup can be subdivided into re-
inforcement learning and iterative learning (Lazari-
dou and Baroni, 2020; Brandizzi, 2023). In a rein-
forcement learning setup, multiple agents communi-
cate with each other in a referential game or a recon-
struction game (Batali, 1998; Kottur et al., 2017). In a
referential game, a sender agent produces a message
that refers uniquely to a specific object. The receiver
agent gets the sender’s message and a mixture of ob-
jects containing the sender’s perceived image.
1
https://github.com/sathishpurushothamanin/transformer-
based-agent-communication-framework
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
118

The receiver agent should refer to the correct ob-
ject pointed by another agent among a group of dis-
similar objects. Both sender and receiver agents get
rewarded when the receiver agent can correctly iden-
tify the object pointed to by the sender.
In a reconstruction game, a sender agent produces
a message that refers uniquely to a specific object.
The receiver agent has to reconstruct the specific ob-
ject using the sender’s message. Both agents get re-
warded when there is a successful reconstruction of
the object.
In iterative learning (Rita et al., 2022; Li and
Bowling, 2019; Ren et al., 2020), a student agent
learns from a teacher agent or a population of agents
pass on knowledge over each generation.
Recently, there are a growing number of frame-
works proposed to study the multi-agent communica-
tion (Jinxin et al., 2023; Wu et al., 2023; Park et al.,
2023; Li et al., 2023).
To study compositionality, (Chaabouni et al.,
2019) and (Evtimova et al., 2018) used LSTM net-
work architecture with and without attention, (Słowik
et al., 2020) used a graph-based deep neural net-
work, recently (Ri et al., 2023) investigated the role
of attention-based deep neural networks.
3 TRANSFORMER-BASED
MULTI-AGENT
COMMUNICATION
FRAMEWORK
Humans use natural language to describe the world
using various word combinations with limited vocab-
ulary. As shown in Figure 1, we model the problem as
multiple agents interacting with each other without a
human in the loop. According to the information bot-
tleneck principle (Tishby et al., 2000), the communi-
cation bottleneck with limited communication capac-
ity forces agents to convey only the shortest informa-
tion possible. Each agent reuses the symbols in the
vocabulary to refer to novel objects.
3.1 Communication Pathways
The communication framework presents two key
challenges corresponding to different information
flows between the agents. The first challenge is the
ability of the receiver agent to recreate the image seen
only by the sending agent. The second challenge is
how the agents can develop a shared language effec-
tively.
Figure 2: Agent 1 shares its representation of the world with
Agent 2 using a symbolic message. Agent 2 decodes the
message to generate its perception of the world. The first
pathway allows us to study if two agents develop a shared
language when each agent recreates an image seen by the
other agent.
Figure 3: Both agents share their symbolic representation
of the world. The second pathway allows us to study if two
agents sharing symbols develop a shared language.
3.1.1 Communication Pathway 1: Semantic
Exchange
As shown in Figure 2, the sender agent can use the
encoder to convert the images into a sequence of sym-
bols and send them to the receiver. The challenge for
the sender is to convey only relevant semantic infor-
mation because of the limited discrete symbolic mes-
sage. The receiver can use the symbols to reconstruct
the images. The challenge for the receiver is to use
only the relevant semantic information to reconstruct
the image. Successful communication emerges when
the receiver can reconstruct the original image with-
out losing the semantic information.
3.1.2 Communication Pathway 2: Shared
Language
As shown in Figure 3, each agent perceives the im-
ages and generates a sequence of symbols. For in-
stance, if two humans look at the digit ’9’ image, they
may use the symbols ’9’ or ’nine’ or ’IX’ etc. The
agents may develop a shared language that may look
dissimilar to our natural language. Successful com-
munication emerges when both agents generate simi-
lar symbolic representations.
3.2 Agent Architecture
Our hypothesis is that languages evolved by paying
attention to various visual features. We introduce a
A Framework for Studying Communication Pathways in Machine Learning-Based Agent-to-Agent Communication
119

Transformer-based agent with skills to generate text
based on visual stimuli and to generate images based
on text stimuli. With this skill the agent is able to
share the message among each other various symbols
based on the stimuli present.
As shown in Figure 1, we designed the agent as
transformer-based encoder-decoder architecture with
a discrete latent space.
3.2.1 Transformer Encoder
The encoder transforms the given image into a se-
quence of symbols. Thus, the agent can speak about
what it sees in the world.
Unless we state otherwise, all the variables X, W,
etc., in the encoding process are real-continuous vari-
ables, that is (X,W ) ∈ R. As shown below, we follow
the feature transformation of the encoder from image
to symbols.
• We transform the image as a sequence of pixels.
• We add learned positional embedding to the se-
quence of pixels.
X
BHW
= X
BHW
+ POSITIONAL EMBEDDING
• We linearly transform the features into fixed hid-
den dimension size M.
X
BM
= X
BHW
W
• We apply dropout to improve learning. (optional)
X
BM
= Dropout(X
BM
, 0.5)
• We apply multi-headed attention.
X
BM
= MultiHeadedAttention(X
BM
)
• Finally, we apply layer normalization and linear
transformation to generate the symbolic message.
X
BM
= LayerNorm(X
BM
, 0.5)
X
BLC
= X
BM
W
3.2.2 Transformer Decoder
The decoder transforms a sequence of symbols into a
specific object. That is, the agent can generate images
using the symbols.
• We add learned positional embedding to the se-
quence of symbols.
X
BLC
= X
BLC
+ POSITIONAL EMBEDDING
• We transform the message into fixed feature di-
mension M.
X
BM
= X
BLC
W
• We apply multi-headed attention.
X
BM
= MultiHeadedAttention(X
BM
)
• We apply layer normalization and linear transfor-
mation to features. Finally, we use the Sigmoid
function to generate the image.
X
BM
= LayerNorm(X
BM
, 0.5)
X
BHW
= X
BM
W
X
BHW
= sigmoid(X
BHW
)
3.2.3 Gumbel SoftMax
We used Gumbel SoftMax distribution to overcome
the challenges concerning backpropagating through
discrete latent dimensions.
Traditional variational auto-encoders learn the
data distribution (mean, variance) through the re-
parameterization trick. During training, we draw the
samples from the data distribution learned parameters
(mean, variance) and some Gaussian random noise.
In our problem, we want to backpropagate through a
set of stochastic neurons, representing the hidden rep-
resentation. Ideally, we want the hidden representa-
tion to express a symbolic message. For this purpose,
we use Gumbel-SoftMax distribution, also known as
Concrete distribution. During training, the temper-
ature of Gumbel-SoftMax distribution is allowed to
anneal from 1 to close to 0. Slow annealing allows
the distribution to collapse to a categorical distribu-
tion gradually. We predefined K categories, that is, the
symbol sequence length. Thus, we learn the symbols
using the Gumbel SoftMax trick that enables indirect
differentiation through the discrete space.
3.3 Training Procedure
1. Get a batch of images, say X.
2. Generate batch of symbols S
i
using an agent i en-
coder: S
i
= encoder
i
(X).
3. Reconstruct the images using the agent’s decoder:
˜
X = decoder
i
(S
i
).
4. Calculate the reconstruction loss as a bi-
nary cross-entropy loss between the origi-
nal and the reconstructed images: L
BCE
=
binary-cross-entropy(
˜
X, X).
5. Calculate the shared language loss as the mean of
the squared error between both agent’s symbols:
L
MSE
= mean-squared-error(S
1
, S
2
).
6. As shown in Figure 4, we calculate the combined
loss by adding reconstruction loss and shared lan-
guage loss: L
combined
= L
MSE
+ L
BCE
.
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
120

7. Repeat the above till a fixed number of iterations
or the combined loss goes below a certain prede-
fined threshold.
Figure 4: Each agent minimizes the binary cross entropy
loss between the recreated and the original image. For
shared language to emerge, we minimize the mean squared
error between two agent’s languages.
3.4 World Model
To evaluate the reconstructed images of the agents,
we created a convolution-based classifier that acts as
a World Model. Detailed architecture of the World
Model is shown in Figure 5. The World Model re-
ceives a batch of images as input, passes through the
convolutional neural network, and outputs the classi-
fication of the digits.
World Model classifies the agents reconstructed
images. If the World Model can classify an agent-
reconstructed image correctly, we can learn that the
agent can communicate meaningful semantic infor-
mation through its symbols. Because we train the
World Model independently, we obtain an unbiased
performance estimate of the agent.
4 EXPERIMENTS
In all our experiments, we restrict the number of sym-
bols allowed to 2 (i.e., 0 or 1) and the communication
sequence length to 12. Thus, we use the terms bits
and symbols interchangeably.
4.1 General Configuration Settings
Following the guidelines of the reproducible experi-
ment, we fix the random seed of pytorch, cudnn, and
numpy. We initialize the Gumbel SoftMax function
with a temperature of 1. We gradually decrease the
temperature at a rate of 0.00003 per iteration. We
turn off the categorical representation by setting hard
to False during training. We turn on the categorical
representation by setting hard to True during the test.
In the transformer architecture, we fixed the number
of multi-headed attention blocks to 6 and the number
of heads to 8. We fixed the training and test batch
Figure 5: World Model architecture is an MNIST convolu-
tional neural network classifier.
sizes to 100. We repeat the training procedure for 200
epochs.
4.2 Evaluation Metrics
The agents communicate with each other by sharing
generated images and symbols. To assess the agent
reconstructed image, we use F1 metric (Davis and
Goadrich, 2006) and structural similarity index mea-
sure (Wang et al., 2003). We evaluate the shared arti-
ficial language using the Levenshtein distance.
F1 Metric. F1 Score in Equation 1 is the harmonic
mean of precision and recall.
f1-score = 2 ∗
precision ∗ recall
precision + recall
(1)
Structural Similarity Index Measure. SSIM mea-
sures the structural difference between any two given
images. SSIM values range from 0 to 1, where near 0
values indicate that the two images are not structurally
similar. The SSIM value near 1 indicates that the two
images are structurally similar. We compare SSIM
between the test image and the agent-recreated test
image. SSIM metric complements the World Model
classification metrics in quantitatively expressing how
far the agent captures the semantic and structural in-
formation.
A Framework for Studying Communication Pathways in Machine Learning-Based Agent-to-Agent Communication
121
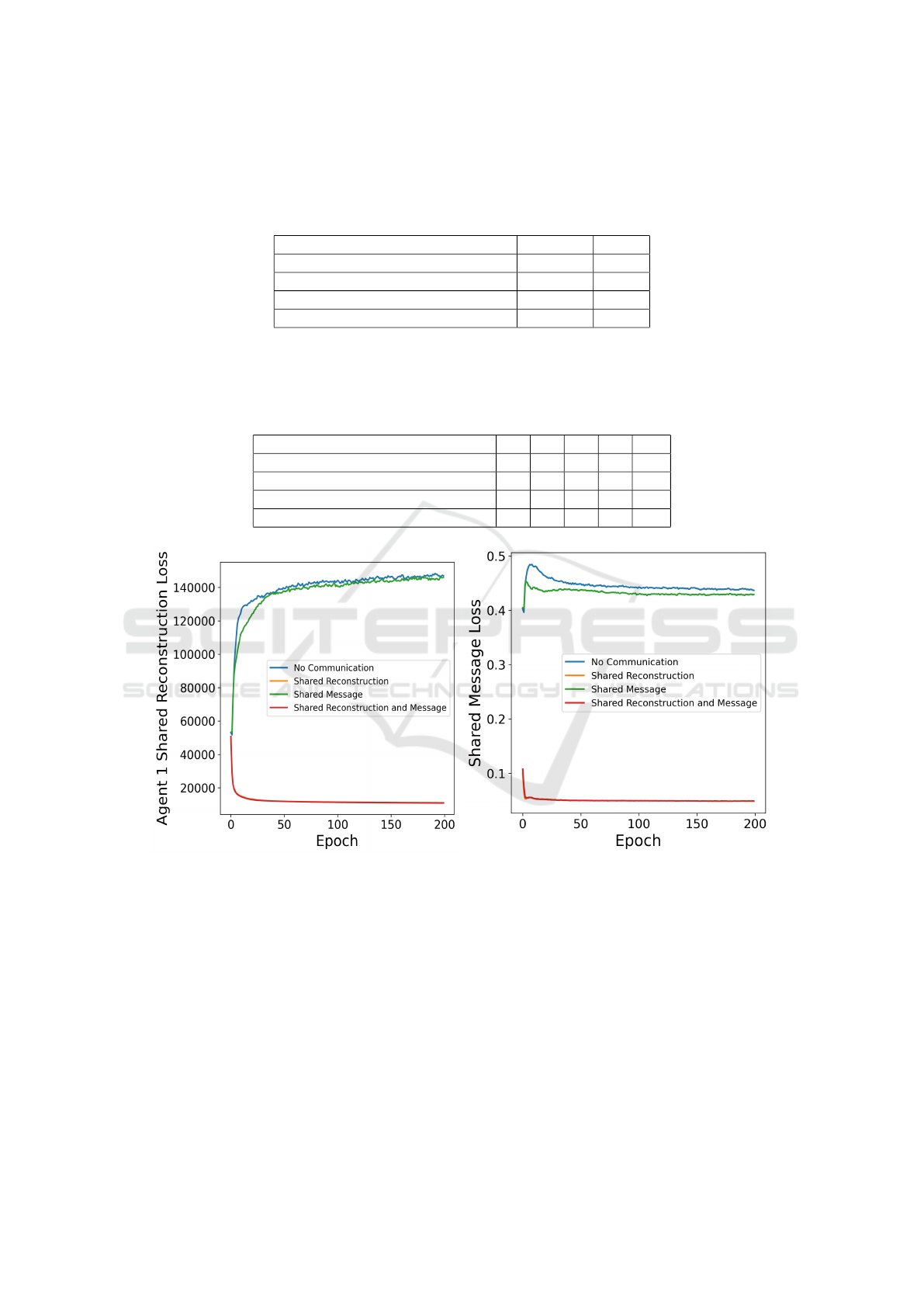
Table 1: We measure the World Model F1 score and the SSIM on the receiver agent reconstructed images under different
communication pathways. If there is no communication between agents or when the agents share messages alone, agents
cannot reconstruct an image using each other’s symbols. Thus, the reconstructed images have a low F1 score and SSIM.
When the receiver agent learns to reconstruct a sender-perceived image, the reconstructed images achieve an F1 score of circa
0.86 and an SSIM of 0.60.
Communication\Metrics F1 Score SSIM
No Communication 0.10 0.09
Shared Reconstruction 0.87 0.60
Shared Message 0.11 0.09
Shared Reconstruction and Message 0.86 0.60
Table 2: We measured the Levenshtein distance between two agents under different communication pathways. When there is
no communication between agents or when the agents share only messages, agents do not develop a shared language as the
Levenshtein distance between the sender and receiver agents is longer than 2 for all the test images. When the sender and
receiver agents learn to reconstruct the images using each other symbols, the sender and receiver develop a shared language
as the distance between the symbols is less than 2 for the majority of the test images.
Communication\Edit Distance 0 1 2 3 ≥4
No Communication 0 0 2 8 90
Shared Reconstruction 31 36 29 3 1
Shared Message 0 1 2 13 84
Shared Reconstruction and Message 28 43 23 6 0
Figure 6: Left: Agent 1 shared reconstruction loss measures the binary cross entropy loss between Agent 2 perceived image
and Agent 1 reconstructed image using the symbols. Right: Shared message loss measures the mean squared error between
two agent representations of the digits in the image. Throughout the training, the agent shared reconstruction and shared
message loss increase even if the agents optimize to generate a similar semantic mapping. The loss of the agents when they
share the symbols alone is comparable to the agent loss that does not communicate at all. Both shared reconstruction loss and
shared message loss converge when we train each agent to reconstruct the image using the other agent’s symbols.
Levenshtein Distance Metric. Levenshtein dis-
tance metric (Levenshtein et al., 1966; Hyyr
¨
o, 2001)
measures the least number of inserts, delete, and sub-
stitute operations required to change one string into
another string. Levenshtein metric allows us to mea-
sure how far apart the languages developed by each
agent in a multi-agent communication framework.
4.3 Communication Pathways
To answer our research questions, we created four
experiments. Each experiment studies the learning
behavior of the agents under four scenarios. For
each scenario, we measure the shared reconstruction
loss as the binary cross entropy loss between the
receiver-generated image and the perceived image of
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
122
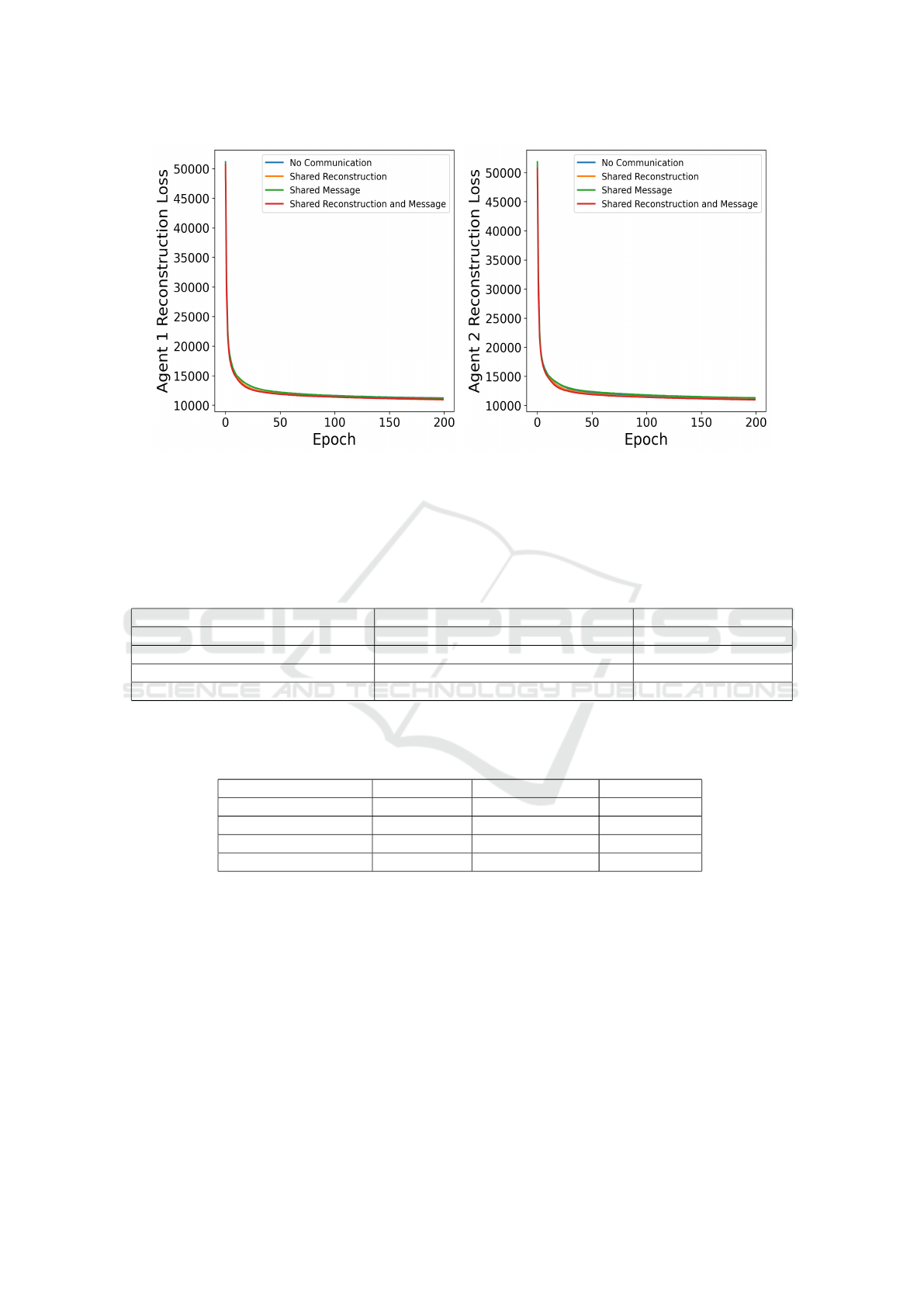
Figure 7: Left: Agent 1 reconstruction loss measure the binary cross entropy loss between the perceived and the reconstructed
image using the symbols. Right: Agent 2 reconstruction loss measure the binary cross entropy loss between the perceived and
the reconstructed image using the symbols. We measured the reconstruction loss for each agent under different communication
pathways. Our results show that the internal perception of the agents remains consistent throughout training.
Table 3: Mean loss of the last 50 epochs of different communication pathways repeated for ten random iterations. Overall,
the shared reconstruction loss and the shared message loss do not show more deviation. The results suggest that language
emergence in the first communication pathway and no language emergence in the second communication pathway are not due
to random variations in the training procedure.
Pathways\Metrics Agent 1 Shared Reconstruction Loss Shared Message Loss
No Communication 137019.29 +/- 9275.42 0.42 +/- 0.01
Shared Reconstruction 11159.43 +/- 63.15 0.05 +/- 0.00
Shared Message 138954.43 +/- 15739.21 0.43 +/- 0.03
Shared Reconstruction and Message 11538.64 +/- 0.0 0.08 +/- 0.00
Table 4: We conducted ablation studies on different architecture choices for the agents. We report the World Model F1 score
and the SSIM on the agent-reconstructed images on the test set. The transformer-based autoencoder architecture outperformed
the convolution-based and fully connected network-based auto-encoder architecture in all metrics.
Metric\Architecture Convolution Fully Connected Transformer
F1 Score 0.78 0.83 0.88
SSIM 0.40 0.46 0.61
Sequence Length 30 30 12
Number of Symbols 10 2 2
the sender agent. We measure the shared message loss
as the mean squared error between the first and the
second agent symbols.
1. No Communication. We train the agents to recon-
struct images using their language. Thus, a classic
encoder-decoder setting with a binary bottleneck
layer.
2. Shared Reconstruction. We train the agents to re-
construct images using their language. Then, each
agent reconstructs the image using the symbols of
another agent. The objective function minimizes
the shared reconstruction loss.
3. Shared Message. We train the agents to recon-
struct the images using their language. The objec-
tive function minimizes the shared language loss.
4. Shared Reconstruction and Shared Message. We
train the agents to reconstruct images using their
language. Then, each agent reconstructs the im-
age using the symbols of another agent. The ob-
jective function minimizes the shared reconstruc-
tion loss and shared message loss.
As shown in Figure 6, the shared language loss
goes down if and only if the shared reconstruction loss
goes down. As shown in Table 1, the agent-generated
A Framework for Studying Communication Pathways in Machine Learning-Based Agent-to-Agent Communication
123

images perform worse on the test set if we do not op-
timize for the shared reconstruction loss. The World
Model accuracy is circa 86, and SSIM is 0.60 only
when the model optimizes with the shared reconstruc-
tion loss. As shown in Table 2, the agents generate
similar symbols if the receiver agent can reconstruct
the sender images. To answer our first research ques-
tion, yes, the receiver agent can successfully recon-
struct an image perceived by the sender only when
the agents learn the symbols concerning the sender’s
image.
Even optimizing specifically for shared language
does not result in language emergence and follows the
loss trajectory of agents that do not communicate. A
similar effect is observed in the test set as shown in
Table 2. There exist no similar symbols even when
optimizing for shared messages. To answer our sec-
ond research question, no, agents sharing only the
symbols do not develop a shared language. Without
intention, the language can not emerge between two
agents. Optimizing the agents concerning symbols
but ignoring what those symbols represent results in
poor language learning.
Moreover, each agent has an internal perception
of the world. As shown in Figure 7, we measured
the reconstruction loss for each agent under different
communication pathways. Our results show that the
internal perception of the agents remains consistent
throughout training.
To better obtain confidence in the results, we re-
peated the experiment for ten random iterations for
each communication pathway, and the loss measure is
shown in Table 3. There is less variation when there
is no communication between agents and when the
agents share only the symbols.
4.3.1 Ablation Studies
We created a fully connected network-based and
convolution-based auto-encoder to benchmark
against our transformer-based agent architecture. The
architecture of fully connected network-based agent
architecture is shown in the Table 5 and 6 in the
Appendix. The convolution-based agent architecture
is shown in the Table 7 and 8 in the Appendix.
We increased the number of symbols and se-
quence length because the lower number of symbols
results in poor representation in fully connected and
convolution-based agents. As shown in Table 4, the
transformer-based network has learned better sym-
bolic representation and has a higher F1 score and
SSIM.
5 CONCLUSIONS
In this paper, we have introduced a framework for
studying the communication between transformer-
based deep learning agents. In our experiments, we
could observe the emergence of a shared language
between the agents if the receiver successfully recon-
structs the image using the message from the sender
agent. We have shown that two agents can develop a
shared language within the Levenshtein distance of 2.
The reconstructed images achieve a 0.87 F1-score ob-
tained from an independent World Model. We found
that agents focusing only on increasing the similar-
ity of symbols do not result in the emergence of lan-
guage.
In the current stage, we see several limitations
with our studies, which we will aim to address in fu-
ture work: First, we have only studied the framework
concerning agents cooperating to develop a shared
language, neglecting potential other relations between
models. Next, we assume agents to have a fixed vo-
cabulary throughout the training and test times. Nat-
ural language is variable in sequence length. Finally,
we experimented with only one pair of agents. An av-
enue for future work would be to expand the frame-
work to many agents interacting with each other.
REFERENCES
Batali, J. (1998). Computational simulations of the emer-
gence of grammar. Approaches to the Evolution of
Language-Social and Cognitive Bases-.
Brandizzi, N. (2023). Towards More Human-like AI Com-
munication: A Review of Emergent Communication
Research. arXiv e-prints, page arXiv:2308.02541.
Chaabouni, R., Kharitonov, E., Lazaric, A., Dupoux, E., and
Baroni, M. (2019). Word-order biases in deep-agent
emergent communication.
Davis, J. and Goadrich, M. (2006). The relationship be-
tween precision-recall and roc curves. In Proceed-
ings of the 23rd international conference on Machine
learning, pages 233–240.
Dubois, Y., Li, X., Taori, R., Zhang, T., Gulrajani, I., Ba, J.,
Guestrin, C., Liang, P., and Hashimoto, T. B. (2023).
Alpacafarm: A simulation framework for methods
that learn from human feedback.
Evtimova, K., Drozdov, A., Kiela, D., and Cho, K. (2018).
Emergent communication in a multi-modal, multi-
step referential game.
Hyyr
¨
o, H. (2001). Explaining and extending the bit-
parallel approximate string matching algorithm of my-
ers. Technical report, Citeseer.
Jang, E., Gu, S., and Poole, B. (2017). Categorical repa-
rameterization with gumbel-softmax.
Jinxin, S., Jiabao, Z., Yilei, W., Xingjiao, W., Jiawen, L.,
and Liang, H. (2023). CGMI: Configurable General
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
124

Multi-Agent Interaction Framework. arXiv e-prints,
page arXiv:2308.12503.
Kottur, S., Moura, J. M., Lee, S., and Batra, D. (2017).
Natural language does not emerge’naturally’in multi-
agent dialog. arXiv preprint arXiv:1706.08502.
Lazaridou, A. and Baroni, M. (2020). Emergent multi-
agent communication in the deep learning era. arXiv
preprint arXiv:2006.02419.
Levenshtein, V. I. et al. (1966). Binary codes capable of cor-
recting deletions, insertions, and reversals. In Soviet
physics doklady, volume 10, pages 707–710. Soviet
Union.
Li, F. and Bowling, M. (2019). Ease-of-teaching and lan-
guage structure from emergent communication.
Li, G., Hammoud, H. A. A. K., Itani, H., Khizbullin, D., and
Ghanem, B. (2023). Camel: Communicative agents
for ”mind” exploration of large scale language model
society.
Park, J. S., O’Brien, J. C., Cai, C. J., Morris, M. R., Liang,
P., and Bernstein, M. S. (2023). Generative agents:
Interactive simulacra of human behavior.
Ren, Y., Guo, S., Labeau, M., Cohen, S. B., and Kirby, S.
(2020). Compositional languages emerge in a neural
iterated learning model.
Ri, R., Ueda, R., and Naradowsky, J. (2023). Emergent
communication with attention.
Rita, M., Strub, F., Grill, J.-B., Pietquin, O., and Dupoux,
E. (2022). On the role of population heterogeneity in
emergent communication.
Słowik, A., Gupta, A., Hamilton, W. L., Jamnik, M.,
Holden, S. B., and Pal, C. (2020). Structural Inductive
Biases in Emergent Communication. arXiv e-prints,
page arXiv:2002.01335.
Tishby, N., Pereira, F. C., and Bialek, W. (2000). The infor-
mation bottleneck method.
Turpin, M., Michael, J., Perez, E., and Bowman, S. R.
(2023). Language models don’t always say what they
think: Unfaithful explanations in chain-of-thought
prompting. arXiv preprint arXiv:2305.04388.
Wang, Z., Simoncelli, E. P., and Bovik, A. C. (2003). Mul-
tiscale structural similarity for image quality assess-
ment. In The Thrity-Seventh Asilomar Conference on
Signals, Systems & Computers, 2003, volume 2, pages
1398–1402. Ieee.
Wu, Q., Bansal, G., Zhang, J., Wu, Y., Li, B., Zhu, E., Jiang,
L., Zhang, X., Zhang, S., Liu, J., Awadallah, A. H.,
White, R. W., Burger, D., and Wang, C. (2023). Au-
togen: Enabling next-gen llm applications via multi-
agent conversation.
Wu, Q., Bansal, G., Zhang, J., Wu, Y., Zhang, S., Zhu, E.,
Li, B., Jiang, L., Zhang, X., and Wang, C. (2023).
AutoGen: Enabling Next-Gen LLM Applications via
Multi-Agent Conversation Framework. arXiv e-prints,
page arXiv:2308.08155.
APPENDIX
Fully Connected Network-Based
Architecture
We created a simple fully connected network-based
auto-encoder architecture for the agents. As shown
in Table 5, the encoder agents receive an image with
a fixed image height and width. The encoder then
transforms the features into a series of fully connected
layers with a fixed hidden dimension size specified
in hidden dim. Finally, the encoder outputs the se-
quence of symbols via the Gumbel SoftMax layer.
As shown in Table 6, the decoder receives a se-
quence of symbols and outputs the image after pass-
ing through a series of fully connected layers with a
fixed hidden dimension of size hidden dim.
Convolution-Based Architecture
We created a convolution-based auto-encoder archi-
tecture for the agents. As shown in Table 7, the en-
coder agents receive an image with a fixed image
height and width. The first two convolutional layers
extract the features in the image using 2D convolu-
tion with a kernel size of 3. Next, we apply the Max-
Pool2D layer with a kernel size of 2. During train-
ing, the dropout function on the output feature with a
probability of 0.25. We flatten the features before ap-
plying the fully connected layer. Next, we apply two
fully connected layers with an optional dropout layer.
Finally, the encoder outputs the sequence of symbols
via the Gumbel SoftMax layer.
As shown in Table 8, The decoder receives a se-
quence of symbols and outputs the image after pass-
ing through a series of fully connected layers with a
fixed hidden dimension of size hidden dim and 9216.
A Framework for Studying Communication Pathways in Machine Learning-Based Agent-to-Agent Communication
125
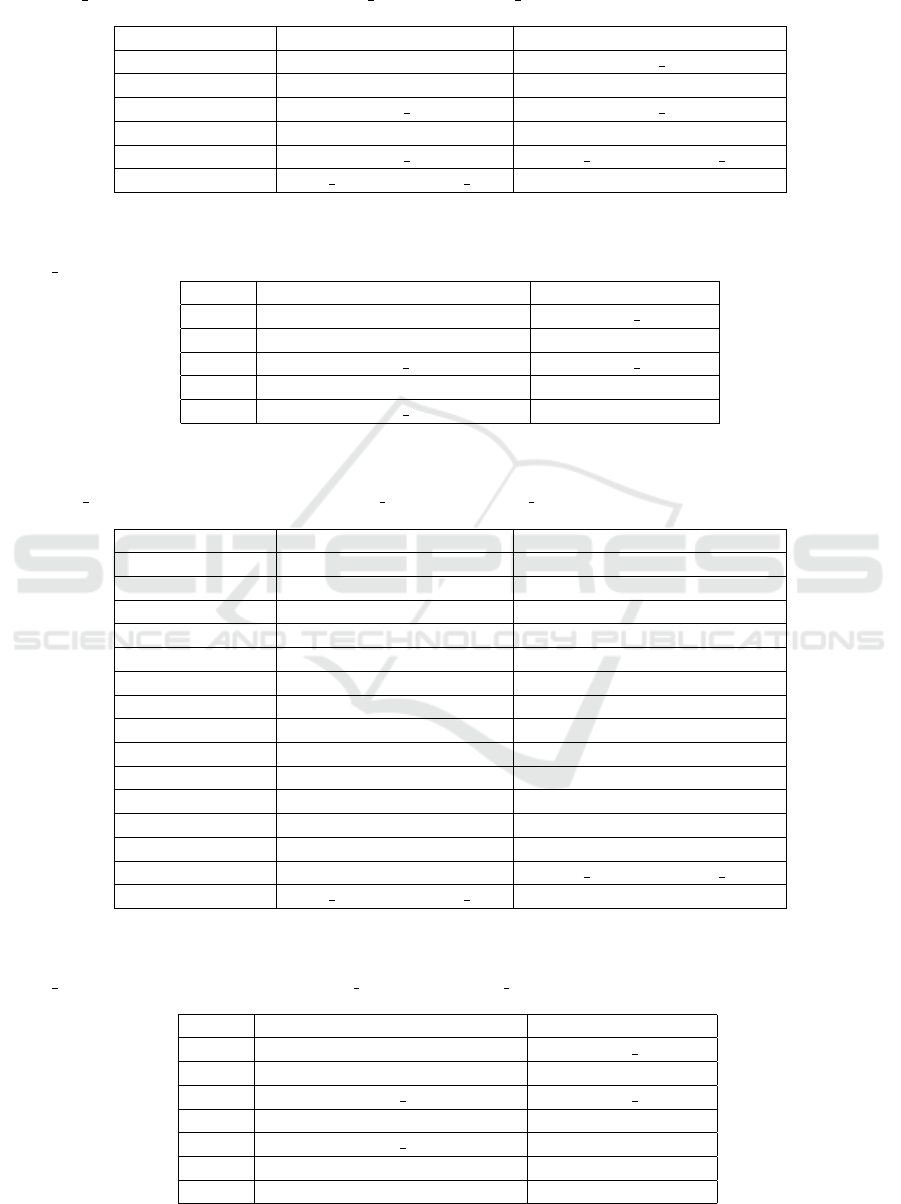
Table 5: We created a fully connected network-based encoder to test various choices for the multi-agent communication
framework. ’-’ denotes that there are no trainable parameters in that layer. The height and width represent the image size,
and hidden dim is the hidden dimension size. laten dim and categorical dim represent the sequence length and the number of
symbols.
Layer Input Output
Linear image: height*width hidden dim
ReLU - -
Linear hidden dim hidden dim
ReLU - -
Linear hidden dim laten dim*categorical dim
Gumbel SoftMax laten dim*categorical dim language: sequence of symbols
Table 6: We created a fully connected network-based decoder to test various choices for the multi-agent communication
framework. ’-’ denote that there are no trainable parameters in that layer. The height and width represent the image size, and
hidden dim is the hidden dimension size.
Layer Input Output
Linear language: sequence of symbols hidden dim
ReLU - -
Linear hidden dim hidden dim
ReLU - -
Linear hidden dim image: height*width
Table 7: We created a Convolution-based agent encoder architecture to test various choices for the multi-agent communication
framework. ’-’ denotes that there are no trainable parameters in that layer. The height and width represent the image size,
and hidden dim is the hidden dimension size. latent dim and categorical dim represent the sequence length and the number
of symbols.
Layer Input Output
Conv2D image: height*width 32
ReLU - -
Conv2D 32 64
ReLU - -
MaxPool2D - -
Dropout - -
Flatten - 9216
ReLU - -
Linear 9216 128
ReLU - -
Dropout - -
Linear 128 64
ReLU - -
Linear 64 laten dim*categorical dim
Gumbel SoftMax laten dim*categorical dim language: sequence of symbols
Table 8: We created a fully connected network-based agent to test various choices for the multi-agent communication frame-
work. ’-’ denotes that there are no trainable parameters in that layer. The height and width represent the image size, and
hidden dim is the hidden dimension size. latent dim and categorical dim represent the sequence length and the number of
symbols.
Layer Input Output
Linear language: sequence of symbols hidden dim
ReLU - -
Linear hidden dim hidden dim
ReLU - -
Linear hidden dim 9216
ReLU - -
Linear 9216 image: height*width
ICAART 2024 - 16th International Conference on Agents and Artificial Intelligence
126
