
Deep Learning Model Compression for Resource Efficient Activity
Recognition on Edge Devices: A Case Study
Dieter Balemans
1,3
, Benjamin Vandersmissen
2
, Jan Steckel
3
, Siegfried Mercelis
1
, Phil Reiter
2
and Jos
´
e Oramas
2
1
Faculty of Applied Engineering, University of Antwerp - imec - IDLab, Sint-Pietersvliet 7, 2000 Antwerp, Belgium
2
Faculty of Science, University of Antwerp - imec - IDLab, Sint-Pietersvliet 7, 2000 Antwerp, Belgium
3
Faculty of Applied Engineering, University of Antwerp - CoSysLab, Groenenborgerlaan 171, 2020 Antwerp, Belgium
Keywords:
Activity Recognition, Model Compression, Pruning, Quantization, Edge Computing.
Abstract:
This paper presents an approach to adapt an existing activity recognition model for efficient deployment on
edge devices. The used model, called YOWO (You Only Watch Once), is a prominent deep learning model.
Given its computational complexity, direct deployment on resource-constrained edge devices is challenging.
To address this, we propose a two-stage compression methodology consisting of structured channel pruning
and quantization. The goal is to significantly reduce the model’s size and computational needs while main-
taining acceptable task performance. Our experimental results, obtained by deploying the compressed model
on Raspberry Pi 4 Model B, confirm that our approach effectively reduces the model’s size and operations
while maintaining satisfactory performance. This study paves the way for efficient activity recognition on
edge devices.
1 INTRODUCTION
Activity recognition is a crucial task in various in-
dustries, including unmanned aerial vehicle monitor-
ing, autonomous driving, and urban security systems.
However, one of the challenges in this field is the
computational complexity associated with large deep
learning models. This, makes it infeasible to deploy
these models on edge devices, where resources are
generally limited. Nevertheless, the recent push to-
ward making decisions at the edge extends to the field
of activity recognition. For example, activity recogni-
tion is being used on remote construction sites for on-
site progress monitoring (IMEC, 2023)(Braun et al.,
2020). Deploying complex algorithms on edge de-
vices offers several benefits. Firstly, it reduces sys-
tem latency since data does not need to be sent to the
cloud for processing. This also enhances the security
and privacy of the system as data does not leave the
device. Lastly, it decreases the cost of the system, as it
removes the need for a powerful server to process the
data. Therefore, we aim to investigate the feasibility
of deploying deep learning-based activity recognition
on edge devices. More specifically, we will explore
how to adapt existing deep learning models to make
them suitable for edge deployment.
This paper focuses on the YOWO (You Only
Watch Once) model proposed by K
¨
op
¨
ukl
¨
u et
al. (K
¨
op
¨
ukl
¨
u et al., 2019). YOWO is a widely used
convolutional neural network architecture for activity
recognition. However, due to its size and complexity,
it is not initially suitable for edge deployment. The
goal is to adapt this model an make it more suitable
for edge computing, by reducing its size and opera-
tions. The target device is the Raspberry Pi 4 Model
B. We aim for the model to maintain high enough per-
formance while fitting within an applications require-
ments. These requirements can be a time (latency)
constraint, a memory constraint or an energy con-
straint. To achieve this, we propose a two-stage com-
pression approach: structured channel pruning and
quantization.
In the first stage, structured channel pruning, our
goal is to decrease the size of the model and the num-
ber of operations needed to execute the model, with-
out affecting its accuracy. This technique selectively
removes channels from convolutional layers, result-
ing in a smaller and faster model. This is because ten-
sors can be reduced in size without the need for spe-
cialized hardware. Moreover, we merge pruning with
quantization to further shrink the model’s size by rep-
resenting the weights and activations with fewer bits.
Balemans, D., Vandersmissen, B., Steckel, J., Mercelis, S., Reiter, P. and Oramas, J.
Deep Learning Model Compression for Resource Efficient Activity Recognition on Edge Devices: A Case Study.
DOI: 10.5220/0012423300003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 4: VISAPP, pages
575-584
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
575

We present our compression approach in combi-
nation with a sensitivity analysis to determine the im-
pact of pruning the model and to find the optimal pa-
rameters for scheduling the pruning. We assess the
effectiveness of our approach by deploying the com-
pressed YOWO model on the Raspberry Pi 4 Model
B. We then measure its latency, energy consumption,
and memory usage. The results show that we can con-
siderably decrease the latency and memory consump-
tion of the YOWO model while keeping task perfor-
mance at an acceptable level.
In the next section we provide an overview of
related work in the field of activity recognition and
deep learning model compression. Section 3.1 de-
scribes the YOWO model and its training process.
Sections 3.2 and 3.3 explain the compression tech-
niques used in this work. Section 4 describes the
experimental setup and presents the results. Finally,
Section 5 concludes the paper and discusses future
work.
2 RELATED WORK
Activity Recognition. Activity recognition is the task
of recognizing activities from a sequence of frames.
In other words, it is the spatiotemporal localization
of activities in observations. Numerous approaches
have been proposed to solve this task. A common ap-
proach is to use a sliding window to extract features
from the observations and use these features to clas-
sify the activity. The features can be extracted using
a variety of methods, such as hand-crafted features,
or deep learning. Earlier deep learning methods, rely
on a two-stream convolutional neural network (CNN)
to extract spatial and temporal features separately and
fuse them to classify the activity (Simonyan and Zis-
serman, 2014)(Feichtenhofer et al., 2016). However,
these methods are computationally expensive and can
be very time-consuming. More recently, the use of
3D CNNs has become more popular. Its is able to
learn both spatial and temporal features simultane-
ously. These models are proven to perform better on
the activity recognition task (Qiu et al., 2017)(Tran
et al., 2017)(Feichtenhofer et al., 2018)(Tran et al.,
2014). However, these models are even more expen-
sive in terms of size and operations. 3D convolutions
have much more parameters and require more opera-
tions than 2D convolutions. This makes them difficult
to deploy on edge devices. Therefore, in this work,
we investigate the possibility of compressing a 3D
CNN for activity recognition. We choose the YOWO
model proposed by K
¨
op
¨
ukl
¨
u et al. (K
¨
op
¨
ukl
¨
u et al.,
2019) as base model. This model is a unified, single-
stage architecture which consist of 2 two branches.
The YOWO model is the fastest model for activity
recognition, however, it is still too large for edge de-
ployment. We provide more details about the model
in Section 3.1.
Compression. Neural network compression is a field
of research that aims to reduce the size and operations
of a neural network. There are several techniques that
can be used to achieve this. Techniques like pruning
and quantization are among the most popular ones,
and often used in combination. Pruning is the pro-
cess of removing weights, neurons or channels from a
neural network. In the field there are numerous tech-
niques, all which differ in the way to determine the
importance of connections (i.e. where to remove con-
nections), the granularity (i.e. which connections to
remove) and the scheduling (i.e. when to remove con-
nections). Generally, pruning is done by removing the
connections and neurons that have the smallest im-
pact on the network’s output. This paved the way to
pruning methods based on weights (Han et al., 2016),
activations (Georgiadis, 2018) and gradients (Liu and
Wu, 2019). For instance, Lee et al. (Lee et al., 2018)
use a saliency-based criterion consisting of the lowest
absolute value of the normalized gradient multiplied
by the weight magnitude for a given set of mini-batch
inputs.
For the granularity, there are two main types
of pruning: unstructured (Frankle and Carbin,
2018)(Tanaka et al., 2020) and structured pruning (Li
et al., 2016)(He et al., 2017). Unstructured prun-
ing removes individual connections from the network.
This means the weight tensor of the network will be
very sparse and highly irregular. These methods allow
for the highest compression rates with the lowest im-
pact on accuracy. However, this sparsity is (currently)
not suitable for hardware acceleration. On the other
hand, structured pruning removes entire block-like
structures from the network (Crowley et al., 2018).
For example, in channel pruning, entire channels of a
convolutional layer are removed. This allows for the
weight tensors to be actually smaller by removing the
entire row or column of the channel, removing a lot
of OPs (operations). On current hardware, and espe-
cially on CPU only devices, this is the most suitable
type of pruning. One drawback of structured pruning
is that it is less flexible than unstructured pruning, and
has a much bigger impact on the network’s perfor-
mance. In this work we focus on structured pruning,
more specifically channel pruning.
In this work we combine pruning with quantiza-
tion. We follow the philosophy of the work of Han
et al. (Han et al., 2016) where pruning is combined
with quantization. They show that quantizing after
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
576
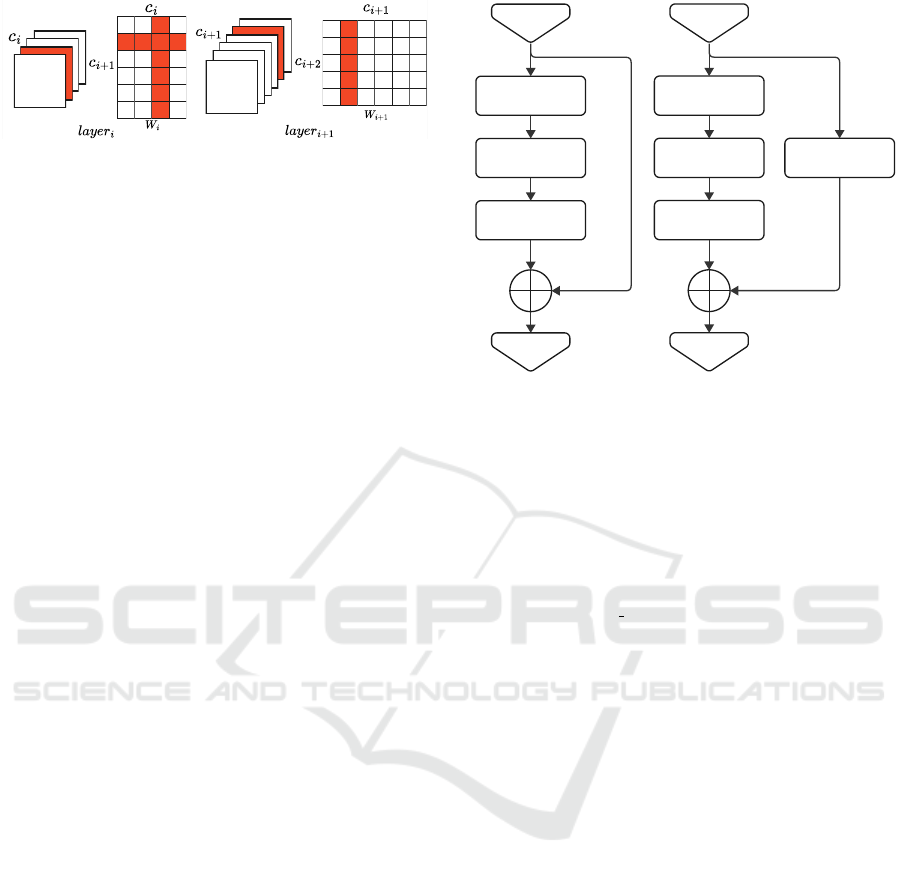
Figure 1: Overview of the structured channel pruning pro-
cess. Here we show the removal of one channel from layer i
and one channel from layer i + 1. The effect of the removal
is visible in red.
pruning is possible without losing accuracy. There-
fore, we propose a similar approach in this work for
compression of large activity recognition models.
3 METHODOLOGY
3.1 Activity Recognition
As mentioned previously, we use the You Only Watch
Once (YOWO) model (K
¨
op
¨
ukl
¨
u et al., 2019) as our
baseline model. YOWO is a single-stage architecture
which consist of 2 two branches to extract temporal
and spatial information from video frames. Specifi-
cally, the 2D backbone is a YoloV2 model (Darknet-
19) (Redmon and Farhadi, 2016). The 3D backbone
is a ResNext-101 model (Xie et al., 2016). Ultimately,
the model predicts the activity class and the bounding
box of the activity in the video frame. Note that there
are variation of the YOWO model with different 2D
and 3D backbone configurations. For this paper we
only use the standard (Darknet-19 and ResNext-101)
configuration. The goal is the evaluate the compres-
sion of this standard configuration.
This configuration makes the model altogether a
fairly large model, with over 121 million parame-
ters and 43 billion operations, making it difficult for
deployment on edge devices with limited resources.
Therefore, we investigate the possibility of compress-
ing the YOWO model to enable inference and analysis
on the edge device. In the next section we will discuss
the compression techniques that we use to compress
the model.
In this work we perform post-training compres-
sion. This means we train the YOWO model before-
hand, and use it as a starting point for the compression
process. We provide more details about the training
and evaluation in section 4.
3.2 Neural Network Pruning
In this work we employ neural network pruning to re-
duce the size and amount of operations of the YOWO
conv1: 3x3, 128
conv2: 1x1, 64
conv3: 3x3, 128
input
128- d
output
128- d
conv1: 3x3, 128
conv2: 1x1, 64
conv3: 3x3, 128
input
256- d
output
128- d
conv_down: 3x3, 128
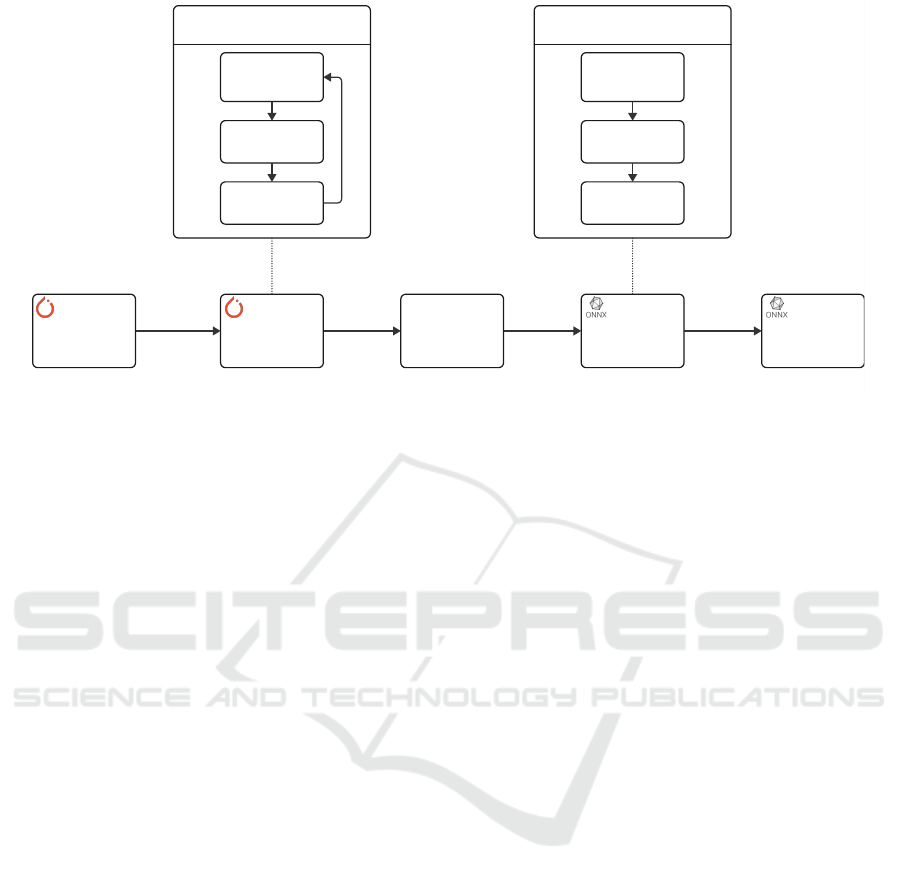
Figure 2: Sample of bottleneck blocks as used in the YOWO
model. (Left) An example of a bottleneck block with-
out downsampling layer. The block takes in 128 channels.
In this block, the addition operation creates a dependency
between the channels of the third convolution operation
(conv3: 3x3, 128), the first convcolution operation (conv1:
1x1, 128) and the input. (Right) An example of a bottle-
neck block with downsampling layer. The block takes in
256 channels. In this block, the addition operation creates a
dependency between the channels of the third convolution
operation (conv3: 3x3, 128), the downsampling convolu-
tion operation (conv down: 3x3, 128), the fist convcolution
operation (conv1: 1x1, 128) and the input.
model. We use a structured iterative channel prun-
ing technique (Wen et al., 2016) to remove unim-
portant channels from the convolutional layers of the
YOWO model. The YOWO model has both 2D and
3D convolutional layers. In both cases we use the
same pruning technique. In order to estimate the im-
portance of each channel, we use two different cri-
teria: weight magnitude (Han et al., 2016) and ac-
tivation (Georgiadis, 2018). The weight magnitude
criterion is based on the magnitude of the connection
weights. We utilize the l
1
-norm of the weights to de-
termine the importance of each channel. The activa-
tion criterion is based on the activation of the neu-
rons. We follow the same approach to estimate the
importance of each channel, using the l
1
-norm, but
this time using the output activations instead of the
weights. We compare the results of both criteria in
Section 4.
The pruning process itself is scheduled in an itera-
tive fashion. In each iteration, we prune a certain per-
centage of the channels from the layers. This is fol-
lowed by a fine-tuning step, where we fine-tune the
model to recover the performance lost during prun-
ing. As we will see in our sensitivity analysis re-
sults in Section 4, the pruning process can be quite
Deep Learning Model Compression for Resource Efficient Activity Recognition on Edge Devices: A Case Study
577
Train Model
Prune
Model
Model Pruning
Importance
Calculation
Channel
masking
Fine Tuning
Quantize Model
(optional)
Quantization
Fuse Layers
Calibration
using test data
Static
Quantization
Export to
ONNX
Deploy
Figure 3: Overview of the full compression pipeline. The pipeline starts with training the model in PyTorch. Then we prune
the model using structured channel pruning. After pruning, we export the model to the ONNX format. Next, we quantize the
model using static post-training quantization. Finally, the model can be deployed on the target device.
aggressive. Especially when pruning both the 2D and
3D backbone simultaneously. Therefore, we split the
pruning process into two phases. In the first phase,
we prune the 2D backbone and fine-tune the model.
In the second phase, we prune the 3D backbone and
fine-tune the model. This way, we can have finer con-
trol of the pruning and prevent the performance drop
from becoming unrecoverable.
As explained before, we opted for a structured
pruning technique, as opposed to unstructured prun-
ing. This because structured pruning is more suitable
for deployment on edge devices. Unstructured prun-
ing techniques, such as magnitude-based pruning as
used in the Lottery Ticket Hypothesis (Frankle and
Carbin, 2018), are very effective in creating sparse
models that maintain performance very well. How-
ever, since the tensors are sparse in a very irregular
fashion, it is difficult to take advantage of this sparsity
in the inference phase. Therefore, we use structured
pruning techniques, such as channel pruning, which
create sparse models in a structured fashion. This
structure allows us to take advantage of the sparsity
in the inference phase. Using channel pruning we can
remove entire channels from the convolutional layers,
resulting in physically smaller tensors. This is shown
in Figure 1. This results in smaller models, that re-
quire less operation and gain a speedup natively from
the sparsity. It is important to note that due to the
models architecture, not all channels can be pruned.
We have to make sure the model matrix operations re-
main valid. For example, this is the case when we use
bottleneck blocks (shown in Figure 2) where the num-
ber of input channels needs to be equal to the number
of output channels, since we add the input to the out-
put. These dependencies between channels are taken
into account when pruning the model.
3.3 Quantization
We use quantization to further reduce the size of the
YOWO model. Quantization involves representing
the weights and/or activation with fewer bits. The
original model uses 32-bit floating point numbers to
represent the weights and activations. In this work
we use static post-training quantization (PTQ) (Kr-
ishnamoorthi, 2018). We quantize the model after
training and pruning. This method is static because
the quantization parameters are calculated once and
are fixed. The goal is that after quantization both the
weights and activations are represented with 8-bit in-
tegers. This allows for a significant reduction in size
for storing the model, and depending on hardware and
software support, a reduction in latency as well.
This process is performed in two steps. The first
step is a calibration step where we collect statistics
of the weights and activations. In our case we collect
the minimum and maximum values of the weights and
activations. These values are subsequently used for a
range-based linear quantization (Jacob et al., 2017).
This is done by running the model on a representative
test dataset. The second step is the actual quantization
step. Here the actual weights and model operations
are replaced with the quantized counterparts.
It is important to note that after quantization
various hardware and software limitations arise.
We perform the quantization in the ONNX frame-
work (ONNX, 2023). This makes deployment of the
compressed model easier, since the ONNX frame-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
578

work is supported by many platforms, including the
Raspberry Pi 4 Model B. However, currently, the
ONNX framework (and its execution providers) does
not support all operation types in quantized form on
our target device. This means that, though the mod-
els weights are quantized, the operations are still per-
formed in floating point depending on hardware sup-
port. This means the main benefit of quantization in
this work is storage, not latency.
3.4 Full Compression Pipeline
In this section, we provide an overview of the full
compression pipeline. In Figure 3, we show the com-
plete pipeline. We begin with the original YOWO
model trained in PyTorch. Then, we prune the model
using the structured channel pruning technique de-
scribed in Section 3.2. After pruning, the model is
exported to the ONNX format. Next, we quantize the
model using the post-training quantization technique
described in Section 3.3. As mentioned the main ben-
efit of quantization is storage reduction, not latency
improvement. Therefore, this quantization step is op-
tional if the model is already small enough. Finally,
the model can be deployed on the target device, which
in our case is the Raspberry Pi 4 Model B. We utilize
the ONNX runtime for inference of the model on the
device. Once all of these steps are completed, we can
measure the latency, energy consumption, and mem-
ory usage of the model on the device. The results of
these measurements are presented in Section 4.3.
4 EXPERIMENTS AND RESULTS
In this section we describe the experiments we per-
formed to evaluate the performance of the proposed
compression pipeline. The experiments involve using
the originally trained activity recognition model as
described in Section 3.1. The compression is, just as
the performance evaluation, task dependent. There-
fore, before we propose an actual pruning schedule
for the full compression stack, we perform a sensi-
tivity analysis on the model. A sensitivity analysis
is a common technique used to determine the impact
of pruning the model, and allows us to find the opti-
mal parameters for scheduling the pruning. In this pa-
per we perform experiments using the YOWO model
trained on two different datasets. The JHMDB-21
dataset (Jhuang et al., 2013) is a subset of the HMDB-
51 dataset (Kuehne et al., 2011) and contains 928
short videos of 21 different activities. Each video has
a single action across all frames. The actions in this
dataset include human actions and poses. The UCF-
24 dataset is a subset of the UCF-101 dataset (Soomro
et al., 2012) and contains 3207 videos of 24 differ-
ent activities. In this dataset multiple instances of the
same activity can occur in a single video. The actions
in this dataset are more related to sports activities.
The YOWO model is trained on both datasets sepa-
rately and each model is used as a starting point for
the compression process. The models are trained us-
ing standard gradient descent with the AdamW opti-
mizer (Loshchilov and Hutter, 2017). More informa-
tion about the training of these baseline models, such
as the used hyperparameters, can be found in Sec. 5.
The compression itself was computed on a Nvidia
Tesla V100-SXM2-32GB GPU. The resource con-
sumption was measured on a Raspberry Pi 4 Model B.
We assess model compression in two ways: by eval-
uating resource consumption and task performance.
For the resource consumption, we focus on the com-
putational complexity and measurements on a target
device. This is done by measuring a range of met-
rics, including: (i) the number of parameters, (ii) the
number of operations (FLOPs or OPs), (iii) the model
file size (quantized and unquantized), (iv) the models
compression ratio ((Eq. I)
size
original
size
compressed
), (v) the mod-
els theoretical speedup ((Eq. II)
#OPs
original
#OPs
compressed
), (vi) the
models latency measured on a target device, (vii) the
models runtime memory usage measured on a tar-
get device, (viii) and the models energy consumption
measured on a target device. The task performance is
evaluated by measuring the performance of the model
on the on a validation dataset. For this we use the
mean Average Precision (mAP) metric. More specifi-
cally we use the frame-mAP metric. This metric mea-
sures the area under the precision-recall curve of de-
tection for each frame. The mAP is calculated using
a IoU threshold of 0.5.
In the next section, we show the results for the
performed sensitivity analysis on the YOWO model.
Afterwards, we use the results of this analysis to
set up a pruning schedule for the full compression
pipeline. We show results of the full compression
pipeline using multiple different schedules. Finally, in
section 4.3 results of the resource consumption mea-
surements on the Raspberry Pi 4 Model B are shown.
4.1 Sensitivity Analysis
As mentioned, we utilize a sensitivity analysis to
make an informed decision regarding the pruning cri-
terion to be employed in the full compression stack.
This analysis entails pruning the network using a spe-
cific criterion and measuring its performance as the
level of sparsity increases. The objective is to deter-
Deep Learning Model Compression for Resource Efficient Activity Recognition on Edge Devices: A Case Study
579
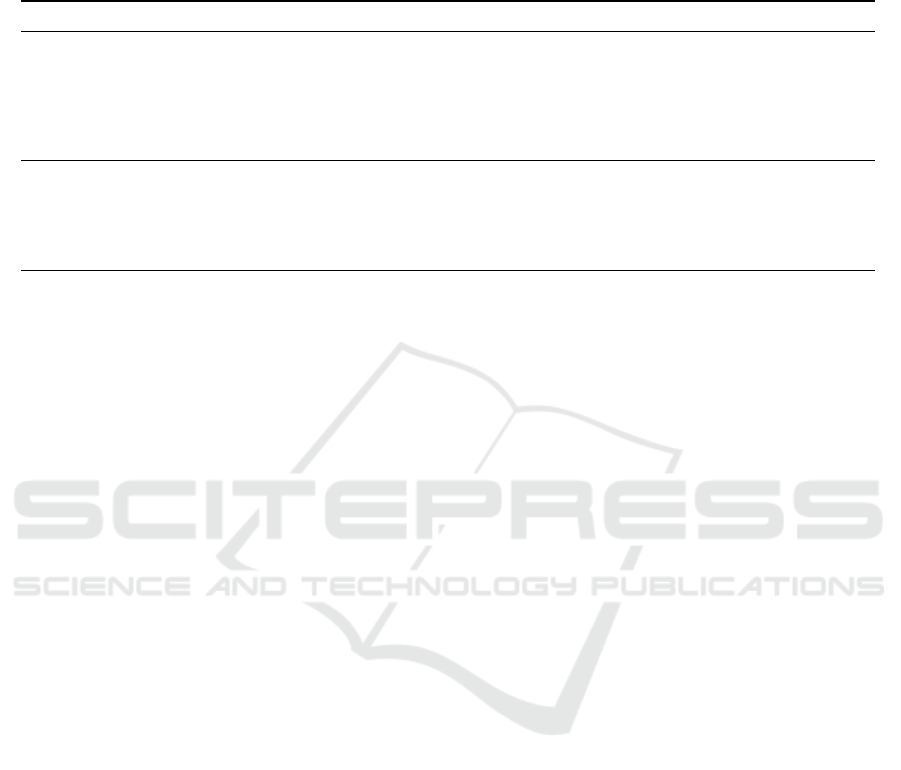
Table 1: Results of the full compression pipeline (pruning and quantization). The models are labeled using an ID. This ID
is used in the following tables to refer to the models. Results are shown for the JHMDB-21 and UCF-24 datasets. The mAP
and Q. mAP are the mean average precision of the original and quantized models, respectively. The Params and OPs are
the number of parameters and operations of the models. The Size and Q. Size are the size of the compressed and quantized
models. The Speedup is the calculated theoretical speedup (Eq. II) of the compressed model compared to the original model.
ID Dataset Attribution mAP / Q. mAP (%) Params OPs Size / Q. Size (MB) Speedup
0 JHMDB-21 — 67.54 / 66.76 1.21e+08 4.34e+10 462.00 / 121.61 1.00
1 JHMDB-21 weight 62.77 / 62.08 7.02e+07 2.06e+10 282.45 / 70.90 2.10
2 JHMDB-21 weight 56.66 / 55.30 6.74e+07 1.59e+10 271.04 / 68.05 2.73
3 JHMDB-21 activation 71.51 / 71.10 7.02e+07 3.54e+10 282.25 / 70.86 1.23
4 JHMDB-21 activation 60.69 / 59.07 6.88e+07 1.87e+10 276.66 / 69.46 2.32
5 JHMDB-21 activation 32.23 / 32.17 5.95e+07 1.37e+10 239.30 / 60.12 3.16
6 UCF-24 — 75.87 / 75.80 1.21e+08 4.34e+10 462.00 / 121.63 1.00
7 UCF-24 weight 75.61 / 75.53 1.01e+08 1.05e+10 404.07 / 101.30 4.15
8 UCF-24 weight 73.63 / 72.03 8.31e+07 9.09e+09 333.56 / 83.68 4.78
9 UCF-24 activation 75.85 / 73.43 8.48e+07 7.73e+09 340.39 / 85.38 5.62
10 UCF-24 activation 71.94 / 71.43 6.83e+07 6.58e+09 274.31 / 68.86 6.60
mine which criterion enables the model to maintain
the highest performance while achieving the highest
level of sparsity. In this research, we compare two
different criteria. Specifically, we utilize the com-
monly used weight magnitude method, as well as an
activation magnitude method. As mentioned earlier,
both methods are used for structured channel pruning,
which involves pruning entire neurons in dense layers
and entire channels in convolution layers. This ap-
plies to both the 2D and 3D backbone of the YOWO
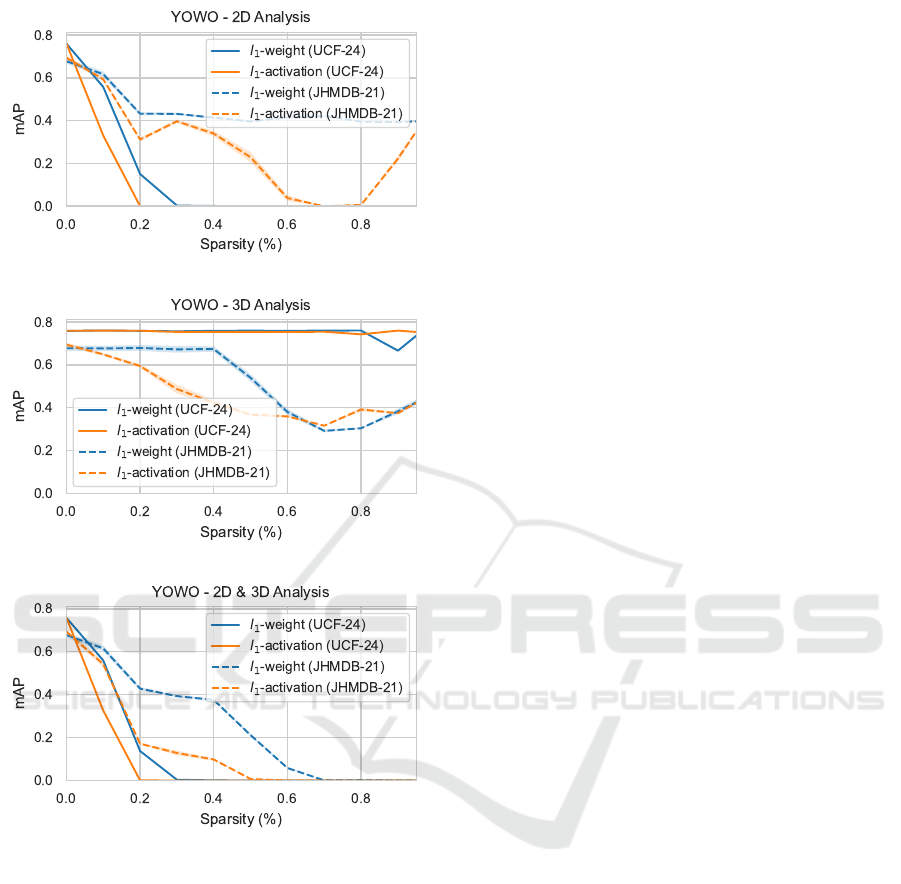
model. In the Figure 4c, we present the results of
the global sensitivity analysis after pruning both the
2D and 3D backbone of the model. It is evident that
the model is significantly affected by structured prun-
ing, resulting in a noticeable decrease in performance
to a suboptimal level. Therefore, retraining will be
necessary to achieve higher sparsity levels. Addition-
ally, using the same level of sparsity for both may
be a naive approach. Therefore, we also conducted
a sensitivity analysis for each backbone separately. It
is important to note that in this setting, we leave the
other backbone untouched and still measured the per-
formance of the entire model. The results are shown
in Figure 4a and Figure 4b.
These graphs, confirm our hypothesis that using
the same pruning ratio for both backbones is not opti-
mal. Both backbones react differently to the pruning.
Overall we see that the 2D backbone is more sensi-
tive to pruning than the 3D backbone. This is logical
as the 2D backbone will generally be used for the lo-
calization of the activity instance.
Additionally, we observe that the 3D backbone is
less affected by low sparsity levels. This is partly due
to the architecture used in this backbone (ResNext-
101), which employs channel grouping in its convo-
lutional layers. Channel grouping divides the input
channels into groups and performs separate computa-
tions on each group using separate kernels. For ex-
ample, if a layer has 128 input channels and grouping
is set to 32, the layer will use only four sets of ker-
nels. This means the number of channels to remove is
very limited and will have a significant impact on the
model. The model is only impacted when the prun-
ing ratios are high enough, for example at least 25%
in this example. Therefore, for pruning the 3D back-
bone, we use higher pruning ratios than for the 2D
backbone.
Finally, we observe a significant difference in sen-
sitivity between datasets. In our experiments, the
model trained on UCF-24 is barely impacted when
we prune the 3D backbone. However, with the model
trained on JHMDB-21, we see a noticeable decrease
in performance. We believe this disparity is due to
the nature of the datasets. As such, a separate pruning
schedule will be needed for each dataset.
In the next section, we will use these results to
make an informed decision on setting up a pruning
schedule for compressing the model.
4.2 Combined Compression Results
In this section we show the results of the com-
bined (pruning and quantization) compression of the
YOWO model. As mentioned previously, we use an
iterative pruning schedule with fine-tuning to prune
the model. We prune the YOWO model in two sep-
arate stages: the first stage involves pruning the 2D
backbone, while the second stage involves pruning
the 3D backbone. After each iteration within each
stage, a fine-tuning step is performed. This fine-
tuning is done using the same hyperparameters as the
original training, except for the number of epochs.
From the sensitivity analysis (4.1), we conclude that
pruning the network separately has less impact on the
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
580
(a)
(b)
(c)
Figure 4: The graphs demonstrate the impact of pruning by
assessing the model’s (frame) mAP with increasing sparsity.
(a) displays the sensitivity analysis when pruning the 2D
backbone. (b) displays the sensitivity analysis when prun-
ing the 3D backbone. (c) displays the sensitivity analysis
when pruning both the 2D and 3D backbone.
model’s performance. Using the results of the sensi-
tivity analysis, we set up a pruning schedule for the
full compression pipeline. This schedule is then fur-
ther tuned experimentally. We show the results of the
compression using different pruning schedules. The
schedule is defined by the pruning ratio per step and
for each backbone, the number of steps for each back-
bone and the number of epochs used for fine-tuning.
The different scheduling settings used for the results
presented in this section can be found in section 5 in
the appendix.
The compression results can be found in Table 1.
This table contains the results for the pruning and
quantization of the YOWO model on the JHMDB-21
dataset and the UCF-24 dataset. We show the results
for different pruning schedules with their quantized
counterparts.
These results show a considerable reduction of the
model size and number of operations are achieved.
Overall we are able to generate the smallest models
using the activation based pruning. However, this is
very dataset/task dependent. For the UCF-24 dataset,
we are able to maintain the mAP very well using both
pruning criteria. However, for this dataset the activa-
tion based pruning is able to generate slightly smaller
and faster models. For the JHMDB-21 dataset, we see
a bigger drop in mAP, as this model is more sensitive
to pruning. For this dataset we are not able to com-
press as aggressively. For the results on the JHMDB-
21 we targeted a theoretical speedup of at least two,
while maintaining an acceptable mAP. For the UCF-
24 dataset we targeted a theoretical speedup of at least
four.
Please note that this does not apply to the
JHMDB-21 model with ID 3. For this model we see
an increase of the mAP when pruning the 2D back-
bone using the activation based criterion. In this case,
the model was not pruned too aggressively, which, in
combination with the fine-tuning, resulted in a bet-
ter performing model. This also follows the results
of (Bartoldson et al., 2020) who show that pruning
can be used during training to improve generalization.
Overall, we managed to speed up the model by at
least a factor of two while maintaining an acceptable
mAP score. For the UCF-24 dataset, we (theoreti-
cally) speed up the model by a factor of 6.6, reducing
the mAP by only about 4%. Observing the combined
pruned and quantized results, we found that the gener-
ated models are approximately six times smaller than
the original model. This significant size reduction is
highly beneficial for edge deployment. The small-
est models were achieved for the JHMDB-21 dataset.
We can conclude that the most substantial size im-
pact occurs when pruning the 2D backbone more ag-
gressively, as demonstrated by the JHMDB-21 mod-
els. The largest impact on speedup is achieved when
pruning the 3D backbone, as shown by the UCF-24
pruned models.
4.3 Resource Consumption on the
Raspberry Pi 4 Model B
In this section, we present the results of resource
consumption measurements from running the com-
pressed model on the Raspberry Pi 4 Model B. The re-
Deep Learning Model Compression for Resource Efficient Activity Recognition on Edge Devices: A Case Study
581

Table 2: Results of the resource consumption measurements on the Raspberry Pi 4 Model B. We show the results of the
original model trained on the UCF-24 dataset, the activation pruned model (ID: 9) and the quantized version of the activation
pruned model. The latency is the average time it takes to process a single iteration. The runtime memory is the average
memory usage of the model during inference. The energy consumption is the total energy consumption of the model during
inference during the measurement period. The results are gathered by running each model for 100 iterations and measuring
the resource consumption during this period. The average power consumption is measured by running each model at a fixed
framerate of 3.2.
Pruned Quantized Latency (ms) Runtime Memory (MB) Energy Consumption (J) Avg. Power Consumption (W)
✗ ✗ 4381.91 678.13 2032.20 4.19
✓ ✗ 1345.98 450.46 638.27 2.70
✓ ✓ 8583.75 408.16 2774.22 3.04
source consumption is assessed by measuring latency,
memory usage, energy consumption, and power con-
sumption when running inference of the models. We
then compare these results with those of the uncom-
pressed model. Latency and memory usage are mea-
sured using built-in Python tools, while energy con-
sumption is measured with a JouleScope JS110. The
JouleScope measures current and voltage to compute
power and energy. The findings are summarized in
Table 2.
We measure a model’s latency, memory usage and
energy consumption by running the model for a fixed
number of iterations. It’s important to note that the
duration of this experiment can vary, as compressed
models operate faster than their uncompressed coun-
terparts. The CPU operates at full capacity continu-
ously, which means there is no difference in power
consumption between models when working in this
mode. It is due to the lower number of operations that
the compressed models are faster and consume less
energy. In a real-world scenario, the models would
run in a fixed number of iterations per second (or
framerate) mode. In this case, compressed models
would idle the CPU for extended periods, resulting
in power and energy savings. We evaluated the to-
tal energy consumption, average latency, and average
memory usage of the model over 100 iterations with-
out a limitation on the framerate. The average power
consumption was measured in a separate experiment
by running each model at a fixed framerate of 3.2 for
the same number of iterations.
We observe that pruning has the most significant
impact on the models. It significantly reduces the en-
ergy consumption by 69% and power consumption by
36%, while making the model 3.3 times faster. How-
ever, there’s a notable difference between the theoret-
ical speedup (5.62) and the actual measured speedup.
We attribute this discrepancy to factors like the sched-
uler, memory access delays, and general background
tasks of the operating system.
Additionally, while quantization does improve
memory, it unfortunately worsens latency and energy
consumption. This is primarily due to the software
limitations of the Raspberry Pi. Currently, the used
ONNX runtime and its execution providers do not
support 3D convolutions in quantized mode. This
could be improved in future work.
5 CONCLUSION AND FUTURE
WORK
In this work, we investigate the feasibility of deep
learning-based activity recognition on edge devices.
More specifically, we investigate the compression the
YOWO model proposed by (K
¨
op
¨
ukl
¨
u et al., 2019).
This model has a single-stage architecture consist-
ing of two branches: a 2D backbone and a 3D back-
bone. This architecture is very large, consisting of
millions of parameters and requiring billions of op-
erations, making it too large and complex for edge
deployment.
We propose a two-stage compression approach:
structured channel pruning and quantization. By ap-
plying iterative structured channel pruning, we aim to
reduce the size and the number of operations of the
YOWO model while maintaining its accuracy. This
pruning technique removes the least important chan-
nels from the network. We compare two importance
criteria, namely, the weight magnitude and the acti-
vation magnitude. Additionally, we combine prun-
ing with quantization, further reducing the size of
the model by representing the weights and activations
with fewer bits.
To evaluate the effectiveness of our approach, we
deploy the compressed YOWO model on the Rasp-
berry Pi 4 Model B and measure its latency, mem-
ory usage, energy and power consumption. The
compressed models were generated after a sensitiv-
ity analysis to determine the impact of pruning the
YOWO models and to find the optimal parameters
for scheduling the pruning. The results of the com-
bined pruning and quantization approach show that
we can significantly reduce the size and operations
of the YOWO model while maintaining task perfor-
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
582

mance. For the UCF-24 dataset, we are able to speed
up (theoretically) the model by a factor of 6.6 while
only reducing the mAP by about 4%.
This result can also be observed in the energy con-
sumption, where there’s a reduction by a factor of
3.2. This significant decrease is especially vital con-
sidering energy consumption is a crucial factor for
edge deployment, enabling the model to be utilized on
battery-powered devices. By examining the memory
usage and latency of the deployed models, it’s clear
that the compressed models are more suitable for edge
deployment.
For future work, other pruning criteria and
scheduling methods can be investigated. Currently,
we used sensitivity analysis to determine a pruning
schedule. However, this is not the optimal way to de-
termine the schedule. This could potentially be au-
tomated, as done in the field of AutoML. For exam-
ple, in the work of (He et al., 2018), a reinforcement
learning approach is used. Furthermore, we used a
static post-training quantization method. In future
work, we could investigate the use of quantization-
aware training. Finally, the quantization results can
also be improved by better software support, as dis-
cussed in Section 3.3.
ACKNOWLEDGEMENT
This research is partly supported by the FWO
SBO Fellowship 1SA8124N ”Knowledge Based Neu-
ral Network Compression: Context-Aware Model
Abstractions” and by the Flanders Innovation En-
trepreneurship (VLAIO) IMEC.ICON project no.
HBC.2021.0658 BoB.
REFERENCES
Bartoldson, B., Morcos, A., Barbu, A., and Erlebacher, G.
(2020). The generalization-stability tradeoff in neu-
ral network pruning. In Larochelle, H., Ranzato,
M., Hadsell, R., Balcan, M. F., and Lin, H., editors,
Advances in Neural Information Processing Systems,
volume 33, pages 20852–20864. Curran Associates,
Inc.
Braun, A., Tuttas, S., Borrmann, A., and Stilla, U.
(2020). Improving progress monitoring by fusing
point clouds, semantic data and computer vision. Au-
tom. Constr., 116:103210.
Crowley, E. J., Turner, J., Storkey, A., and O’Boyle, M.
(2018). A closer look at structured pruning for neural
network compression. pages 1–12.
Feichtenhofer, C., Fan, H., Malik, J., and He, K. (2018).
SlowFast networks for video recognition.
Feichtenhofer, C., Pinz, A., and Zisserman, A. (2016). Con-
volutional Two-Stream network fusion for video ac-
tion recognition.
Frankle, J. and Carbin, M. (2018). The lottery ticket hypoth-
esis: Finding sparse, trainable neural networks. pages
1–42.
Georgiadis, G. (2018). Accelerating Convolutional Neu-
ral Networks via Activation Map Compression. Pro-
ceedings of the IEEE Computer Society Conference
on Computer Vision and Pattern Recognition, 2019-
June:7078–7088.
Han, S., Mao, H., and Dally, W. J. (2016). Deep compres-
sion: Compressing deep neural network with pruning,
trained quantization and huffman coding. In 4th In-
ternational Conference on Learning Representations,
ICLR 2016, San Juan, Puerto Rico, May 2-4, 2016,
Conference Track Proceedings.
He, Y., Lin, J., Liu, Z., Wang, H., Li, L.-J., and Han, S.
(2018). AMC: AutoML for model compression and
acceleration on mobile devices.
He, Y., Zhang, X., and Sun, J. (2017). Channel pruning for
accelerating very deep neural networks. In 2017 IEEE
International Conference on Computer Vision (ICCV),
volume 2017-Octob, pages 1398–1406. IEEE.
IMEC (2023). imec.icon project - BoB. https://www.
imec-int.com/en/research-portfolio/bob. Accessed:
2023-11-13.
Jacob, B., Kligys, S., Chen, B., Zhu, M., Tang, M., Howard,
A., Adam, H., and Kalenichenko, D. (2017). Quan-
tization and training of neural networks for efficient
Integer-Arithmetic-Only inference.
Jhuang, H., Gall, J., Zuffi, S., Schmid, C., and Black, M. J.
(2013). Towards understanding action recognition. In
2013 IEEE International Conference on Computer Vi-
sion, pages 3192–3199. IEEE.
K
¨
op
¨
ukl
¨
u, O., Wei, X., and Rigoll, G. (2019). You only
watch once: A unified CNN architecture for Real-
Time spatiotemporal action localization.
Krishnamoorthi, R. (2018). Quantizing deep convolutional
networks for efficient inference: A whitepaper.
Kuehne, H., Jhuang, H., Garrote, E., Poggio, T., and Serre,
T. (2011). HMDB: A large video database for human
motion recognition. In 2011 International Conference
on Computer Vision, pages 2556–2563. IEEE.
Lee, N., Ajanthan, T., and Torr, P. H. S. (2018). SNIP:
single-shot network pruning based on connection sen-
sitivity. CoRR, abs/1810.02340.
Li, H., Kadav, A., Durdanovic, I., Samet, H., and Graf,
H. P. (2016). Pruning Filters for Efficient ConvNets.
5th International Conference on Learning Represen-
tations, ICLR 2017 - Conference Track Proceedings,
(2016):1–13.
Liu, C. and Wu, H. (2019). Channel pruning based on
mean gradient for accelerating Convolutional Neural
Networks. Signal Processing, 156:84–91.
Loshchilov, I. and Hutter, F. (2017). Decoupled weight de-
cay regularization.
ONNX (2023). Open neural network exchange. https://
onnx.ai/. Accessed: 2023-11-13.
Deep Learning Model Compression for Resource Efficient Activity Recognition on Edge Devices: A Case Study
583

Qiu, Z., Yao, T., and Mei, T. (2017). Learning Spatio-
Temporal representation with Pseudo-3D residual net-
works.
Redmon, J. and Farhadi, A. (2016). YOLO9000: Better,
faster, stronger.
Simonyan, K. and Zisserman, A. (2014). Two-Stream con-
volutional networks for action recognition in videos.
Soomro, K., Zamir, A. R., and Shah, M. (2012). UCF101:
A dataset of 101 human actions classes from videos in
the wild.
Tanaka, H., Kunin, D., Yamins, D. L. K., and Ganguli, S.
(2020). Pruning neural networks without any data by
iteratively conserving synaptic flow.
Tran, D., Bourdev, L., Fergus, R., Torresani, L., and Paluri,
M. (2014). Learning spatiotemporal features with 3D
convolutional networks.
Tran, D., Wang, H., Torresani, L., Ray, J., LeCun, Y., and
Paluri, M. (2017). A closer look at spatiotemporal
convolutions for action recognition.
Wen, W., Wu, C., Wang, Y., Chen, Y., and Li, H. (2016).
Learning structured sparsity in deep neural networks.
Xie, S., Girshick, R., Doll
´
ar, P., Tu, Z., and He, K. (2016).
Aggregated residual transformations for deep neural
networks.
A Appendix
A.1 Scheduling Hyperparameters
In Table 3 the different scheduling hyperparameters used for
the pruning experiments are shown. These settings where
chosen based on the results of the sensitivity analysis and
experimentally tuned.
A.2 Training Hyperparameters
In this section the different training hyperparameters used
for the experiments are shown. We utilized two different
datasets to train the base models for compression. Table 4
lists the hyperparameters used for training these base mod-
els.
Table 4: Training Hyperparameters for UCF-24 and
JHMDB-21 datasets.
Dataset UCF-24 JHMDB-21
Parameter
Downsample 1 1
Temporal Downsample 2 1
Clip Length 16 16
Confidence Threshold 0.3 0.3
NMS Threshold 0.5 0.5
Confidence Threshold (Validation) 0.005 0.005
NMS Threshold (Validation) 0.5 0.5
Freeze 2D Backbone False False
Freeze 3D Backbone False False
Batch Size 8 4
Test Batch Size 8 8
Accumulate 16 16
Optimizer adamw adamw
Momentum 0.9 0.9
Weight Decay 0.0005 0.0005
Max Epoch 5 5
Base Learning Rate 0.0001 0.0001
Learning Rate Decay Ratio 0.5 0.5
Warmup Strategy linear linear
Warmup Factor 0.000667 0.000667
Warmup Iterations 500 500
Table 3: Different scheduling hyperparamters used for the pruning for the in the full compression pipeline.
ID Dataset Attribution 2D Iterations 3D Iterations 2D Pruning Ratio 3D Pruning Ratio Fine-tuning Epochs
0 JHMDB-21 — — — — — —
1 JHMDB-21 weight 1 4 0.90 0.60 6
2 JHMDB-21 weight 5 8 0.50 0.80 5
3 JHMDB-21 activation 5 0 0.50 — 5
4 JHMDB-21 activation 1 4 0.90 0.60 6
5 JHMDB-21 activation 5 2 0.50 0.80 5
6 UCF-24 — — — — — —
7 UCF-24 weight 0 12 0.00 0.90 6
8 UCF-24 weight 1 12 0.20 0.90 6
9 UCF-24 activation 0 12 0.00 0.90 6
10 UCF-24 activation 1 12 0.20 0.90 6
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
584
