
Hierarchical Bitmask Implicit Grids for Efficient Point-in-Volume
Queries on the GPU
Julius Ikkala
a
, Tuomas Lauttia
b
, Pekka J
¨
a
¨
askel
¨
ainen
c
and Markku M
¨
akitalo
d
Tampere University, Tampere, Finland
fi
Keywords:
Computer Graphics, Real-Time Rendering, Ray Tracing, Data Structures.
Abstract:
We propose “Hierarchical Bitmask Implicit Grids”, a novel, memory-efficient spatial index data structure
for querying bounding volumes based on a contained point, targeting real-time use cases on GPUs. Like
grid structures based on 3D arrays, implicit grids allow for nearly array-like direct lookups of cells without
traversal through a spatial tree structure. However, the space complexity of this structure is O(n) with respect
to resolution as opposed to O(n
3
), which allows for dramatically higher resolutions than would be feasible
with a 3D array. We demonstrate the effectiveness of this data structure by applying it to two example use
cases: light culling and decal rendering. We measure both cases with ray tracing and multi-view rendering.
We show that with tens of thousands of entries, our data structure can be built in 0.1–0.2 milliseconds, being
∼2.9x faster than the compared state-of-the-art decal method and orders of magnitude faster than dense 3D
arrays, while delivering at least similar or even up to doubled rendering performance.
1 INTRODUCTION
Looking up overlapping volumes for a point in space
is a common problem in real-time computer graphics.
Two typical examples of this encountered in modern
video games are light culling, i.e. figuring out which
limited set of lights are taken into account when shad-
ing a surface; and decals, which modify the mate-
rial data at a surface in order to add things like bul-
let holes and puddles, often dynamically. (Akenine-
M
¨
oller et al., 2018)
These problems are typically solved with highly
efficient screen-space structures (Olsson and Assars-
son, 2011; Geffroy et al., 2020). However, the screen-
space domain does not include points outside of the
view frustum, which are commonly encountered with
ray tracing, as rays can freely bounce within the
scene. For multi-view displays, screen-space struc-
tures would be calculated for each view separately,
multiplying their build time by however many views
are needed. For example, the Looking Glass Portrait
display usually takes between 48–100 separate views
in its ”quilt” (Looking Glass Factory, Inc., 2023).
Even a 0.1 ms build time for a single view can there-
a
https://orcid.org/0000-0002-5373-3190
b
https://orcid.org/0000-0003-3568-6316
c
https://orcid.org/0000-0001-5707-8544
d
https://orcid.org/0000-0001-8164-0031
fore balloon to 5 to 10 milliseconds, which is a signif-
icant portion of the 16 milliseconds available in a 60
Hz target framerate.
Both issues with ray tracing and multi-view dis-
plays can be alleviated by using a world-space data
structure. Several contemporary game engines are us-
ing grids based on 3D arrays (Unity Technologies,
2023; Kelly et al., 2021) to cull light sources for ray
tracing. These have fast lookup times: the lookup
is simply accessing an array, unlike tree structures,
which traverse through a hierarchy of nodes with data
dependencies between each step. The downside to 3D
arrays is the space complexity of O(n
3
), which makes
high-resolution or large-scale grids impractical. Vary-
ing grid cell sizes based on camera distance alleviates
this problem somewhat in practice (Kelly et al., 2021),
at the expense of precision at distance.
As an improvement over 3D arrays, we propose a
world-space data structure for querying a list of vol-
umes overlapping with a given point in space. It is
an implicit grid; the cells are only constructed during
lookup by combining per-axis information. The im-
plicit grid is sliced into slabs along each of the three
principal axes. The overlap status of each entry’s vol-
ume is stored in a bitmask with each slab. Given a
point, taking the bitwise AND of the bitmasks of cor-
responding slabs yields a set of overlapping volumes
with no false negatives.
Ikkala, J., Lauttia, T., Jääskeläinen, P. and Mäkitalo, M.
Hierarchical Bitmask Implicit Grids for Efficient Point-in-Volume Queries on the GPU.
DOI: 10.5220/0012421600003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 1: GRAPP, HUCAPP
and IVAPP, pages 285-292
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
285

The bitmasks are very sparse when there are thou-
sands of small volumes in a large scene. To take
advantage of this sparsity, we propose a hierarchical
layer which allows skipping over large empty portions
in the bitmasks, improving lookup time significantly.
With the bitmask sizes we suggest, just one layer of
hierarchy is effective for up to at least tens of thou-
sands of entries. We further increase the effectiveness
of this hierarchical structure by sorting the entry vol-
umes along the Z-order curve (Morton, 1966) before
building the acceleration structure.
In practice, we demonstrate that on contemporary
GPU hardware, this data structure is efficient to build
from scratch, even with up to tens of thousands of
entries. Further, we show that our data structure is
highly effective for its typical use cases: light culling
and decal lookup in multi-view rasterization and ray
tracing. In this article, we present the following con-
tributions:
• Application of implicit grids to light culling in ray
tracing and multi-view contexts.
• Application of implicit grids to decal rendering in
ray tracing and multi-view contexts.
• Addition of a hierarchical layer and Z-order curve
sorting to implicit grids for improving the lookup
performance.
2 RELATED WORK
Tiled Deferred Shading and Tiled Forward Shading
(Balestra and Engstad, 2008; Olsson and Assarsson,
2011) cull lights with a contribution below a given
threshold by dividing the screen into tiles and assign-
ing the kept lights to each tile. Clustered deferred and
forward shading (Olsson et al., 2012) improve on this
by presenting a method that also divides the tile frusta
into cells (called clusters) by depth. Compared to
tiled shading, this method lets fewer lights be handled
within screen-space tiles with great depth discontinu-
ities. Similar data structures have also been used for
decal rendering in forward pipelines (Geffroy et al.,
2020). However, these screen-space structures are
not generally applicable to ray tracing, as they only
cull data within the viewport, while bounced rays can
reach out-of-screen areas as well. Multi-view render-
ing would also require building these for each view-
point, making the build time of screen-space struc-
tures less than ideal in that case.
World-space light clustering methods have been
limited to naive dense grids in the industry (Unity
Technologies, 2023; Kelly et al., 2021). The cubic
space complexity of these grids forces them to be
quite low-resolution. (Kelly et al., 2021) uses varying
cell sizes in the grid structure, based on camera posi-
tion. We use uniform cell sizes, as the implicit data
structure allows for enough precision with a compact
memory footprint to simply increase resolution glob-
ally whenever precision is not high enough near the
camera.
(Bahnassi, 2021) present methods for finding de-
cals in world-space by placing their bounding vol-
umes in a Top-Level Acceleration Structure (TLAS)
and tracing effectively zero-length rays. Their most
performant variant that supports multiple overlapping
decals is based on using an any-hit shader to collect
a list of decals. They suggest using a small array for
this, e.g. 2-3 entries. Having more overlapping decals
than that will cause issues with this method, appear-
ing as unpredictable decal ordering and missing de-
cals. They also present a variant which does not have
this limitation, but it is an order of magnitude slower
according to their measurements.
Our proposed method has similarities to collision
detection methods: the sweep-and-prune algorithm
(also known as sort-and-sweep) (Baraff, 1992) uses a
similar approach in which objects are bound by over-
lapping slabs along axes. However, that method di-
vides the axes continuously and cannot do individ-
ual coverage lookups in constant time. The basic
bitmask-based implicit grid data structure itself is not
new: (Ericson, 2005) introduced a form of it for use
in collision detection (implicit grid using bit arrays).
Another data structure with similarities has been
proposed in the context of light culling for rasteriza-
tion by (Drobot, 2017). Their light clustering method
separates the Z axis from the X and Y axis with “Z-
binning” and also uses bitmasks. Based on this, a
blog post (Sylvan, 2017) suggested binning X and Y
axes as well. This would have resulted in a similar
data structure as the one described by (Ericson, 2005).
However, the author admits in the post that they did
not implement or evaluate the method.
To our knowledge, the implementation of this data
structure in this field and the hierarchical layer are
novel contributions. Compared to grids based on 3D
arrays, implicit grids improve on the space complex-
ity, from O(n
3
) to O(n) where n is the number of grid
cells along an edge. The hierarchical layer improves
iteration speed in situations with tens of thousands of
entries by allowing skipping large portions of the bit-
mask at once.
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
286
0
0
0
0 0 0 0
0
1
1
1 1
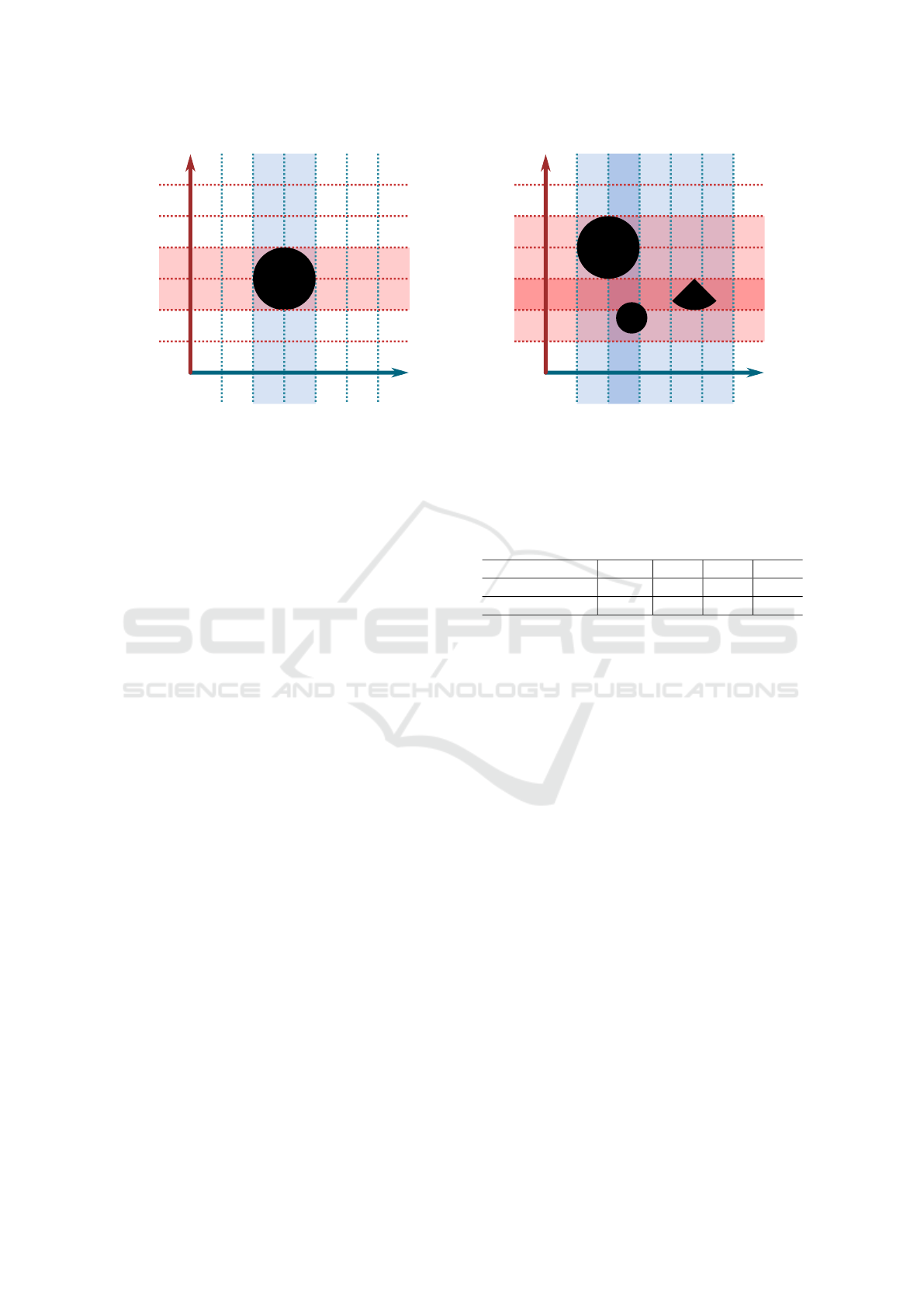
(a) One object. A set bit signals presence on a slab.
1
2
3
001
001
001
011
110
010
010 100 100000
000
000
(b) For multiple objects, there is one bit per object.
Figure 1: A 2D analog of the data structure. The bitmasks on each slab specify which objects overlap with the slab. The least
significant bit corresponds to object 1. The bitwise-AND of the bitmasks of two slabs corresponding to any grid cell results
in a bitmask representing the set of objects which potentially overlap with the cell.
3 IMPLICIT GRID
The proposed implicit grid data structure works by
storing the effective range of each object along three
axes. The axes are sliced into evenly spaced slabs.
Each slab is represented by a bitmask. A slab bit-
mask has one bit per object, which is set to 1 if the
object overlaps with this slab and 0 if not. To de-
termine which objects overlap with a given grid cell
in space, a bitwise AND of the bitmask of the cor-
responding slab on each axis is taken. The objects
which potentially overlap with the grid cell are set to
1 in the resulting bitmask. Due to the nature of us-
ing three perpendicular axes in this data structure, the
shape of the volume bounding an object is an axis-
aligned rectangular cuboid, so the structure will report
false positives if the true shape of the range is some-
thing else. Figure 1a visualizes the implicit grid with
a single object, while Figure 1b shows a multi-object
situation.
Compared to explicit grids, this method is both
cache friendly and memory efficient (Ericson, 2005);
the data needed to look up a grid cell is always near its
world-space neighbors in memory as well, due to each
axis being stored as a linear list of bitmasks. Addi-
tionally, the memory usage and build time is O(3mn)
instead of O(mn
3
), where m is the number of entries
and n is the number slabs on every axis. Both benefits
map well to modern GPU architectures as well.
In practice, we store the per-slab bitmask as an
array of 4-channel vectors of 32-bit unsigned inte-
gers. We selected this vector width by also testing
2-channel 32-bit vectors and 4-channel 64-bit vectors,
and found the 4-channel 32-bit approach fastest in our
Table 1: An example of a hierarchical bitmask layer, with
sector size of 4 bits. The hierarchical layer can be used to
quickly skip large portions of the full bitmask.
Entry indices 16-13 12-9 8-5 4-1
Full bitmask 0000 0000 1100 0101
Hierarchy layer 0 0 1 1
implementation, on an RTX 3090. Other sizes could
very well be optimal on some other hardware or use
cases. Since these parameters do not affect the output
image in any way, the optimal parameters can be cho-
sen by selecting whichever is fastest on the hardware
in question. A 4-channel vector of 32-bit integers has
128 bits, and can thus represent the presence of 128
entries. We call these vectors “bitmask sectors” going
forward.
3.1 Hierarchy
Once the number of entries is high enough (typically
in the tens of thousands), directly iterating through
all bitmask sectors becomes costly. Most of the bit-
mask sectors are usually empty, as entries generally
only cover a small portion of the entire scene. To re-
duce the number of reads needed to iterate through
the set bits of the bitmask, we use another bitmask as
a layer of hierarchy. The bits of this hierarchical bit-
mask layer represent each sector of the base bitmask.
A bit is set to 1 if any of the bits in the corresponding
sector is 1. This way, bitmask sectors fully consist-
ing of zero can be quickly skipped. Table 1 shows an
example case of this.
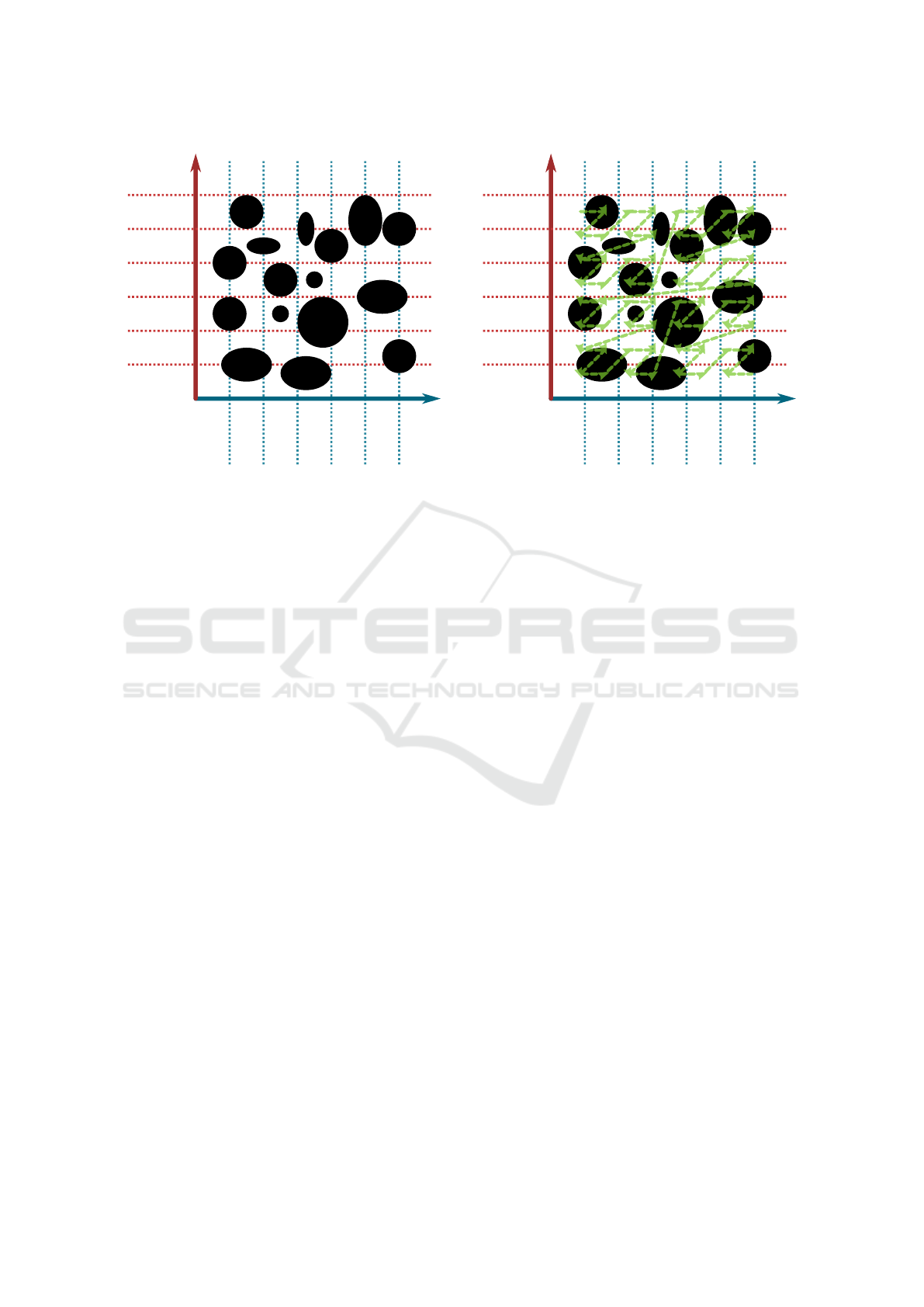
Even if the bitmasks are mostly sparse, if the order
of entries is random, the bits are spread throughout
Hierarchical Bitmask Implicit Grids for Efficient Point-in-Volume Queries on the GPU
287

the sectors uniformly, causing many bitmask sectors
to have just a few bits set. The hierarchy is most ef-
fective when as many sectors as possible are fully zero
and thus skippable, with the 1-bits mostly present to-
gether in individual sectors. Sorting the entries ac-
cording to the Z-order curve (Morton, 1966) before
building the implicit grid drastically improves the ef-
ficiency of the hierarchy, due to grouping nearby en-
tries in the same or nearby bitmask sectors. Figure 2
visualizes the effect of this sorting.
We calculate the Z-order curve inside the axis-
aligned bounding box (AABB) that contains the cen-
troids of all objects, and sort based on the centroid lo-
cation. We use 10-bit precision per axis in the curve,
as it was the maximum precision we could fit in a
32-bit index (3 axes times 10 bits). Lower precision
can also be used, but doing so can reduce the benefit
gained by sorting when the resolution of the Z-order
curve is lower than the density of slabs in the grid.
3.2 Building
The process of building the implicit grid consists of
the following steps:
1. (Optional) Sort volumes by centroid coordinate
along Z-order curve
2. Calculate applicable range of each volume along
each axis
3. For each bitmask sector of each slab of each axis,
find overlapping volume ranges and assign bits
4. (Optional) Build hierarchical bitmask layer based
on high-resolution bitmasks.
The building process can be fully implemented on
the GPU, and the steps past sorting are “embarrass-
ingly parallel”.
We implement step 1 using a Vulkan-based radix
sort implementation (The Fuchsia Authors, 2021). In
practice, we used a 30-bit Z-order curve, 10 bits per
axis. The curve is aligned to the AABB containing
the centroids of all volumes. The sorting is used to
roughly cluster lights with similar overlaps into suc-
cessive bits; this makes the hierarchical bitmask layer
more effective at skipping sectors due to more sectors
being completely zero. If the hierarchical layer is not
used, this specific benefit no longer applies and sort-
ing can thus be skipped without major performance
implications.
When handling step 2 in the light culling context,
the range of each light is initially estimated based on a
cut-off brightness parameter. During step 2, the struc-
ture can take visibility into account for a fairly low
additional cost. If shadow maps have been computed
for each light source, the ranges can be bounded by
the maximum AABB of the distances present in each
shadow map. Decals, on the other hand, are typically
already defined as Oriented Bounding Boxes (OBB);
the range step only needs to find the extents of the
OBB along each grid axis (i.e. find the AABB con-
taining the decal OBB).
For step 3, we use a workgroup geometry of
32×4, representing 32 slabs and the 4 32-bit unsigned
integers forming a sector. Each work item reads one
range into shared memory, corresponding to the 128
bits in the current sectors. This way, the range infor-
mation needed to build the bitmasks for 32 slabs can
be fetched at once. The rest of the step is trivial: on
each slab, go through the light ranges for the sector,
and write a 0 or 1 bit to the bitmask depending on if
the range overlaps with the bitmask’s slab.
Step 4, the hierarchical layer, is optional, and usu-
ally only beneficial when the number of entries is in
the thousands. It is built in a quite simple manner: for
each bit in the hierarchical layer, read the sector from
the full bitmask, and check if it is non-zero.
3.3 Iterating over Entries
First, the queried point’s coordinate is transformed
and quantized to the location and resolution of the im-
plicit grid. The resulting coordinates on each axis cor-
respond directly to the slab indices. When not utiliz-
ing the hierarchical layer, we then iterate through the
bitmasks of the selected slabs, calculate the bitwise
AND between them, and report the index of each set
bit as an overlap.
As a concrete example, in the decal rendering
case, if the queried point is the position of the surface
depicted in a given pixel, then the reported indices
correspond to decals which are potentially present at
the surface.
In the case with a hierarchy, we first iterate
through the hierarchy bitmask in a similar bitwise
AND fashion. Instead of reporting the index when a
set bit is encountered, we instead now visit the corre-
sponding sector in the underlying bitmask and calcu-
late the bitwise AND between those slabs and report
those indices.
4 EXPERIMENTAL SETUP
We apply the proposed hierarchical bitmask implicit
grid (HBIG) data structure to two different use cases:
decal rendering and light culling. In both situations,
we use a PBR version of the “Sponza” scene (The
Khronos Group, 2018) with added relevant elements,
as shown in Figure 3. We set our implicit grid imple-
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
288
2
12
16
15
13
3
14
5
11
4
9
10
1 6
7
8
0000 1000
0010 0011
0100
0011
0100
0010
0100
0010
0100
0000
0011
0001
0101
0000
1010
0000
1000
1001
1000
1000
1000
0100
0000
1100
0010
0100
0000
0100
0010
0100
1000 1011
0010 0001
0001 0010
0000 1100
0100
0000
1001 0100
0010 0100
1100 0000
0010 0100
0100 0000
(a) The objects are in random order.
2
12
15
13
3
14
16
5
11
4
9
10
1
6
7
8
0000 0000
1100 0101
0000 0000
1110 1110
0100 0001
0001 1000
0110 0110
0000 0000
1011 1000
0000 0000
1001 1000
0000 0000
0000
1010
0000
1000
0000
1010
0000
1011
0001
1100
0001
0010
0011
0001
0010
0100
0110
0000
0110
0000
1100
0000
1100
0000
1100
0000
1000
0000
(b) The new indices assigned along a Z-order curve.
Figure 2: A 2D analog of the data structure, showing bitmasks in a 16-object situation. In each bitmask, the top-left bit
corresponds to object 16, while the bottom-right corresponds to 1. (a) The objects are in random order. As the indices
for each bitmask are mostly uniformly distributed, it is rare for 4-bit sectors to be fully zero. (b) The indices have been
assigned along the Z-order curve. As ordering the objects according to their location also places them near each other in the
bitmask, they are more likely to appear in the same sector. This increases the number of empty sectors, which in turn lets the
hierarchical bitmask layer skip more entries.
mentation to start using the hierarchy layer and entry
sorting at 1024 entries, as they have little to no benefit
before that. In all cases, we use a resolution of 512
3
for all implicit grids.
For decal rendering, we measure performance by
spreading a range of 0 to 65536 decals across the sur-
faces of the test scene at random, as seen in Figure 3a.
In this case, the scene is lit by one bright light source.
We compare our method to a decal rendering method
based on using the Top-Level Acceleration Structure
(TLAS) for querying the bounding boxes of decal vol-
umes (Bahnassi, 2021).
The TLAS approach requires special care with
overlapping decals; to be performant, the maximum
number of allowed overlapping decals needs to be
fairly small. However, our test case has several re-
gions with lots of overlaps. We set the maximum
overlap count to 4 to not slow down the algorithm too
much but also allow it to deal with many of the over-
lapping decals, although several areas in the scene
still have some issues due to having 5 or more over-
laps.
For light culling, we spread 0 to 65536 point lights
randomly in the same scene, as seen in Figure 3b. The
lights are kept relatively dim so that for any point in
space, most lights can be culled. This is necessary to
demonstrate the efficiency of light culling algorithms.
We compare our method to 3D arrays with links to
light lists. Constant-size cells were used due to the
relatively constrained size of the scene. We present
two cases: 16
3
(A16) which is faster to build but
causes long light lists due to low granularity, and 32
3
(A32) which is slower to build but has more precision
to cull lights more accurately.
For both use cases, we measure two contexts:
multi-view rasterization and path tracing. For multi-
view rasterization, we render a 16 × 8 grid of views
at the resolution of 256 × 256, offset from each other
by 0.1 units. This setup is chosen to approximate the
needs of light field displays (Looking Glass Factory,
Inc., 2023) while keeping rendering performance in
the real-time territory. For ray tracing with decals, we
path trace one indirect bounce at 1920×1080. For the
light case, we instead calculate shadow rays to each
shaded light, but only if the light is within its range.
This approach limits the performance hit of false pos-
itives. We did not implement similar skipping in the
multi-view case, which thus also visualizes the false
positive rate differences more clearly.
In all cases, we measure the time taken to build
the corresponding data structure, as well as render-
ing time. Build times include sorting when it is be-
ing used, and rendering times include data structure
lookups along with rendering tasks like ray tracing
and rasterization. For each data point, we measure
the times for 100 frames and average them. The mea-
surements are run at increments of 128 entries. They
were run on a PC with an RTX 3090 GPU.
Hierarchical Bitmask Implicit Grids for Efficient Point-in-Volume Queries on the GPU
289
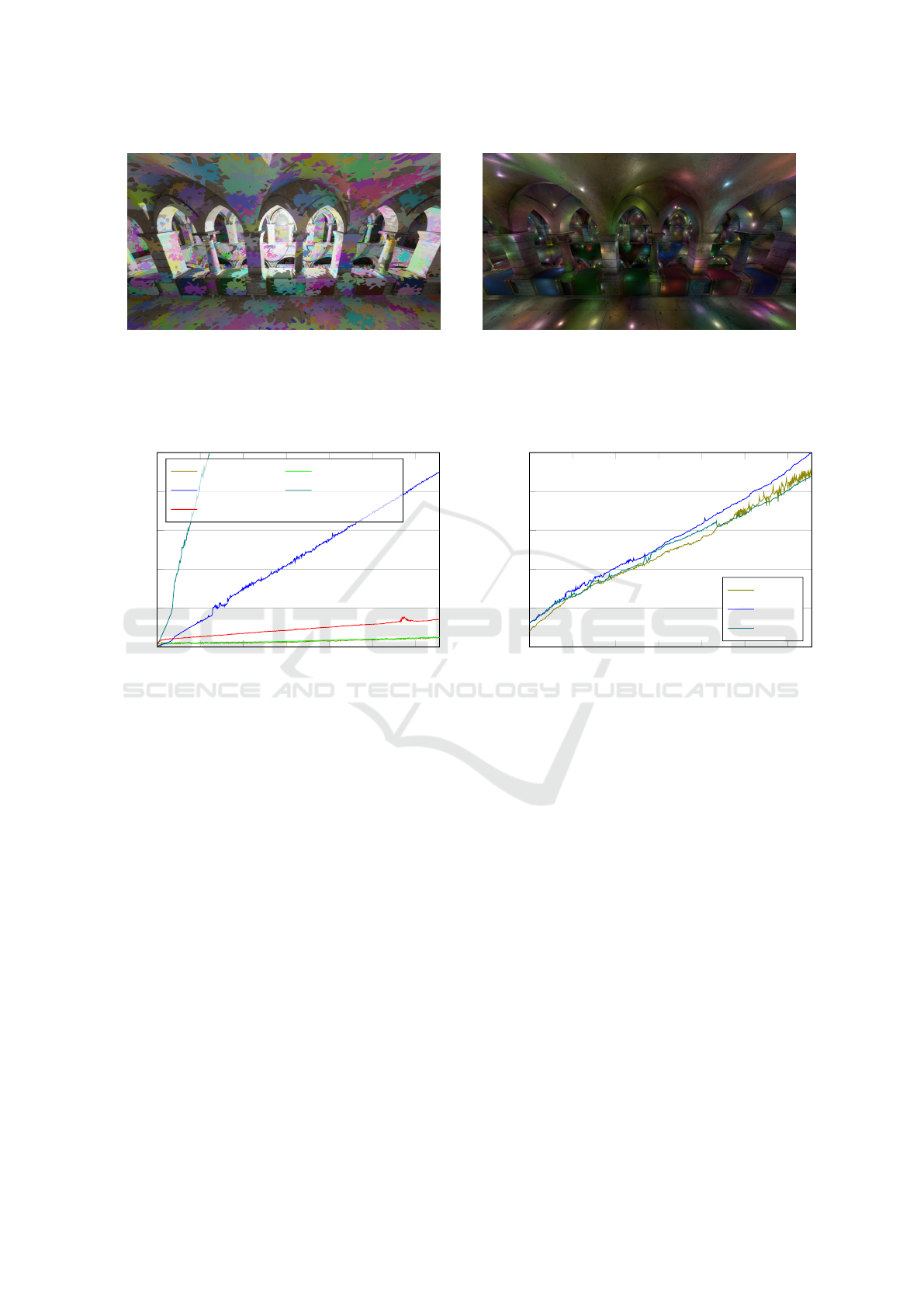
(a) Decal rendering with 65536 decals. (b) Light culling with 65536 lights.
Figure 3: We use the “Sponza” scene in our measurements of both example use cases of implicit grids. We vary the number
of entries from 0 to 65536. When the compared algorithms are functioning correctly, there are no differences in image quality
or contents.
0 1 2 3 4
5 6
·10
4
0
1
2
3
4
5
Item count
Time (ms)
Build performance
HBIG lights HBIG decals
A16 lights A32 lights
TLAS decals
Figure 4: Performance scaling of the build step of each
method as the number of entries changes.
5 RESULTS
Figure 4 shows the build time of each compared data
structure. The build times between ray tracing and
multi-view runs are essentially identical due to the
workload being the exact same, so we only present
the build times measured from the ray tracing runs.
At 65536 entries, implicit grids only took 0.24 ms to
build in both use cases. The 32
3
3D array took around
27 ms to build, while 16
3
took ∼4.5 ms. Building the
decal TLAS took ∼0.7 ms, which is around triple that
of the implicit grid method.
As shown in Figure 5, there are no big differences
in the rendering times between the methods when ray
tracing shadow rays, other than the 16
3
3D array be-
ing slightly slower at high light counts. This slow-
down is caused by light lists in each cell being larger
than necessary due to the limited precision, resulting
in poor culling. The differences between all of the
methods are small due to shadow rays being skipped
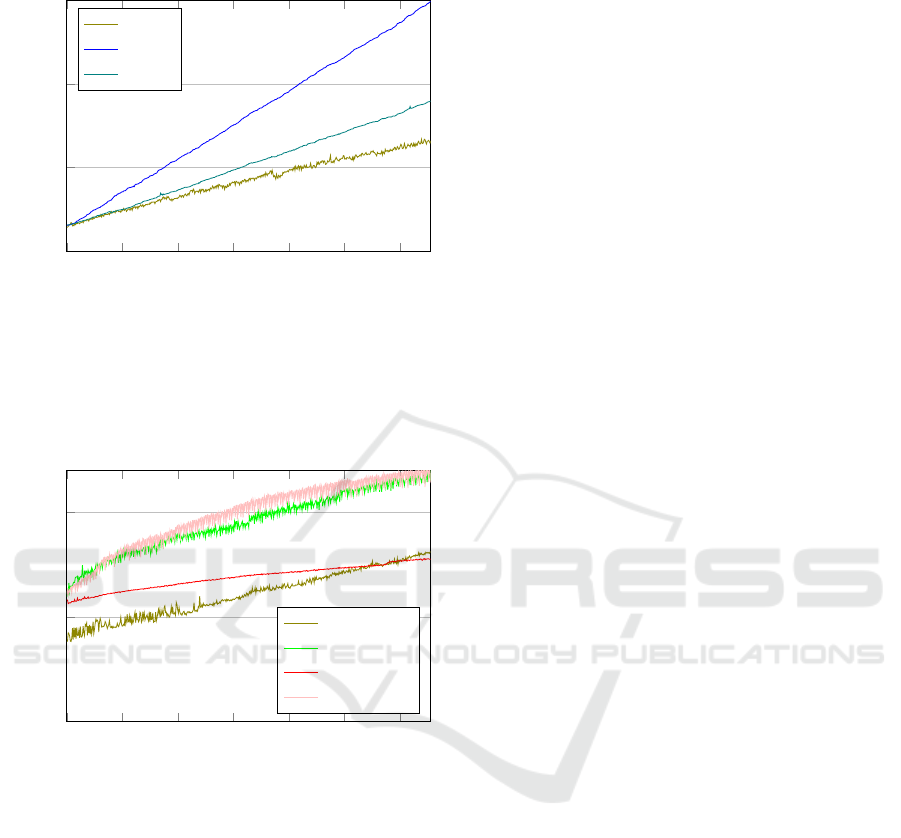
0 1 2 3 4
5 6
·10
4
0
2
4
6
8
10
Light count
Time (ms)
Rendering, RT light culling
HBIG
A16
A32
Figure 5: Performance scaling of rendering with each
method in the light culling use case in ray tracing. Dif-
ferences are diminished due to shadow rays being skipped
for false-positive lights.
for all “false-positives”; lights that are in range ac-
cording to the data structure but can still be culled
based on their range limit.
In the multi-view rasterization case, we only cull
lights based on the structures themselves, and do
not skip “false-positives” the same way as previ-
ously. Therefore, Figure 6 demonstrates the differ-
ences achieved by better culling precision much more
clearly; with high light counts, implicit grids are over
twice as fast as 16
3
3D grids and over 25% faster than
32
3
.
Figure 7 shows all decal rendering performance
curves. In the ray tracing use case, implicit grids have
a lower overhead at the low decal counts, but lose
out in the high end as the TLAS case has a shallower
slope. However, the TLAS method renders incorrect
images near the end of the range due to many regions
having more than 4 overlapping decals. This means
that because the implicit grid method is actually cor-
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
290
0 1 2 3 4
5 6
·10
4
0
20
40
60
Light count
Time (ms)
Rendering, MV light culling
HBIG
A16
A32
Figure 6: Performance scaling of rendering with each
method in the light culling use case in multi-view rasteri-
zation. False positives are not skipped in this case, which
shows the benefit of the higher precision achieved with the
implicit grid.
0 1 2 3 4
5 6
·10
4
0
5
10
Decal count
Time (ms)
Rendering, decals
HBIG RT
HBIG MV
TLAS RT
TLAS MV
Figure 7: Performance scaling of rendering with each
method in the decal rendering use case. The TLAS ap-
proach has disproportionately good results at high decal
counts due to only handling up to 4 overlapping decals cor-
rectly, the rest being skipped if more decals are encountered.
rectly handling all overlapping decals, it is blending
more decals together per pixel than TLAS, causing
more computation and memory accesses.
The multi-view decal case shows both methods
competing closely with each other in the low decal
counts, with implicit grids taking a lead near 2
14
de-
cals. At that point, stacks of over 4 overlapping de-
cals are rare. As the decal count increases, the TLAS
method catches up to implicit grids but also starts ren-
dering incorrect images for the same reason as in the
ray tracing case.
Table 2 shows building and rendering perfor-
mance differences when the hierarchy layer and sort-
ing of entries are toggled on and off. The order of
entries in the unsorted cases is random. There are
only minor differences between each variation in the
build times; this is expected as the workload of each
build step is the same if the step is present. Rendering
performance is significantly hindered if the hierarchy
layer or entry sorting are disabled.
Overall, implicit grids are much faster to build
than any of the other methods at practically every en-
try count. The rendering performance is also either
similar or better than the compared methods in each
situation. In total, the overall cost (build + render) of
implicit grids is lower even in the TLAS comparison
with ray tracing: even if we disregard TLAS’s over-
lap issue, the build time difference of 0.47 ms to the
implicit grid’s benefit is enough to beat TLAS’s ren-
dering time lead of 0.36 ms at 65536 decals.
6 FUTURE WORK
Using the X, Y and Z axes for the implicit grid results
in the bounding volumes being axis-aligned bounding
boxes. In order to get tighter bounds around volumes
which are not AABBs, more axes could be utilized,
each slicing away some false positives. This would
result in the bounding volumes being k-DOPs (dis-
crete oriented polytopes).
For importance sampling of lights, it could be in-
teresting to use an implicit-grid-like approach to rep-
resent importance trees with spatial variation. Essen-
tially, instead of a bitmask, each slab could contain
a tree structure. Then, when looking up an entry at
a given point, the importance for a tree node would
be dynamically constructed based on the node data in
each corresponding slab. However, our cursory exper-
iments suggest it may be challenging to find a method
to preserve the sampling benefits while decoupling
the tree data to slabs.
7 CONCLUSION
We presented “Hierarchical Bitmask Implicit Grids”,
a novel, memory-efficient spatial index data struc-
ture for querying bounding volumes based on a con-
tained point, targeting real-time use cases on GPUs.
We demonstrated the effectiveness of this data struc-
ture by applying it to both decal rendering and light
culling of up to tens of thousands of decals and lights.
We showed that the grid can be fully rebuilt from
scratch in 0.1–2 milliseconds even with tens of thou-
sands of entries, allowing for handling highly dy-
namic scenes. This build time is nearly three times
Hierarchical Bitmask Implicit Grids for Efficient Point-in-Volume Queries on the GPU
291
Table 2: Performance breakdown of the 65536 light culling case with ray tracing. To demonstrate the effectiveness of the
hierarchy layer and entry sorting, variations of the implicit grid data structure with and without these features are listed in the
table. The build time is split into 4 steps: “Sort”, “Range”, “Bitmask”, and “Hierarchy”. These refer to build steps 1, 2, 3,
and 4 as listed in Section 3.2. “Render” is the time spent in ray tracing, and “Total” is the sum of all build steps and rendering
time. All times are in milliseconds.
Sort Range Bitmask Hierarchy Render Total
Unsorted without hierarchy N/A 0.012 0.098 N/A 25.2 25.3
Unsorted with hierarchy N/A 0.012 0.096 0.023 30.2 30.3
Sorted without hierarchy 0.071 0.010 0.097 N/A 28.4 28.6
Sorted with hierarchy (proposed) 0.076 0.010 0.102 0.023 8.9 9.1
faster than the closest compared structure (the decal-
rendering TLAS), and orders of magnitude faster than
3D arrays.
Although there is more variation in the results of
our rendering performance measurements, we also
demonstrate that hierarchical bitmask implicit grids
can either match or exceed the compared methods
in performance: At its best, our method can deliver
over double the rendering performance, as seen in the
multi-view light culling measurements. In the decal
rendering case with ray tracing, our method gains an
edge over the TLAS method due to having higher per-
formance at lower decal counts and generating correct
output at higher decal counts by not imposing a limit
on overlapping decals.
Due to the positive results in the light culling and
decal rendering use cases, we believe that hierarchical
bitmask implicit grids could also be highly beneficial
in many other GPU applications, warranting further
research in various use cases.
ACKNOWLEDGEMENTS
This work was supported by the Academy of Finland
under Grant 325530 and Grant 351623.
REFERENCES
Akenine-M
¨
oller, T., Haines, E., and Hoffman, N. (2018).
Real-Time Rendering. A K Peters/CRC Press, 4th edi-
tion.
Bahnassi, W. (2021). Ray tracing decals. In Ray Trac-
ing Gems II: Next Generation Real-Time Rendering
with DXR, Vulkan, and OptiX, pages 427–440. Apress,
Berkeley, CA.
Balestra, C. and Engstad, P.-K. (2008). The technology of
Uncharted: Drake’s fortune. Game Developer Confer-
ence.
Baraff, D. (1992). Dynamic Simulation of Non-Penetrating
Rigid Bodies. PhD thesis.
Drobot, M. (2017). Improved Culling for Tiled and Clus-
tered Rendering. In ACM SIGGRAPH 2017 Advances
in Real-Time Rendering in Games course.
Ericson, C. (2005). Chapter 7 - spatial partitioning. In Er-
icson, C., editor, Real-Time Collision Detection, The
Morgan Kaufmann Series in Interactive 3D Technol-
ogy, pages 285–347. Morgan Kaufmann, San Fran-
cisco.
Geffroy, J., Gneiting, A., and Wang, Y. (2020). Render-
ing the Hellscape of Doom Eternal. In ACM SIG-
GRAPH 2020 Advances in Real-Time Rendering in
Games course.
Kelly, P., O’Donnell, Y., ter Elst, K., Ca
˜
nada, J., and Hart, E.
(2021). Ray tracing in Fortnite. In Marrs, A., Shirley,
P., and Wald, I., editors, Ray Tracing Gems II: Next
Generation Real-Time Rendering with DXR, Vulkan,
and OptiX, pages 791–821. Apress, Berkeley, CA.
Looking Glass Factory, Inc. (2023). Hologram 101 - quilts.
https://docs.lookingglassfactory.com/keyconcepts/
key-concepts#3.-quilts. Accessed: 2023-11-14.
Morton, G. M. (1966). A computer oriented geodetic data
base and a new technique in file sequencing.
Olsson, O. and Assarsson, U. (2011). Tiled shading. Jour-
nal of Graphics, GPU:235–251.
Olsson, O., Billeter, M., and Assarsson, U. (2012). Clus-
tered Deferred and Forward Shading. In Dachsbacher,
C., Munkberg, J., and Pantaleoni, J., editors, Euro-
graphics/ ACM SIGGRAPH Symposium on High Per-
formance Graphics. The Eurographics Association.
Sylvan, S. (2017). Thoughts on light culling for clustered
shading. https://www.sebastiansylvan.com/post/light
culling/. Accessed: 2023-11-14.
The Fuchsia Authors (2021). RadixSort/VK.
https://fuchsia.googlesource.com/fuchsia/+/refs/
heads/main/src/graphics/lib/compute/radix sort/.
Accessed: 2023-11-14.
The Khronos Group (2018). glTF Sample Models. Ac-
cessed: 2023-11-14.
Unity Technologies (2023). Unity manual: Ray tracing
light cluster. https://docs.unity3d.com/Packages/
com.unity.render-pipelines.high-definition@17.0/
manual/Ray-Tracing-Light-Cluster.html. Accessed:
2023-11-14.
GRAPP 2024 - 19th International Conference on Computer Graphics Theory and Applications
292
