
Visualization of the Basis for Decisions by Selecting Layers Based on
Model's Predictions Using the Difference Between Two Networks
Takahiro Sannomiya
a
and Kazuhiro Hotta
b
Meijo University, Nagoya, Japan
Keywords: Explainable AI, Neural Network Interpretability, Class Activation Map.
Abstract: Grad-CAM and Score-CAM are methods to improve the interpretation of CNNs whose internal behaviour is
opaque. These methods do not select which layer to use, but simply use the final layer to visualize the basis
of the decision. However, we wondered whether this was really appropriate, and wondered whether there
might be important information hidden in layers other than the final layer in making predictions. In the
proposed method, layers are selected based on the prediction probability of the model, and the basis of
judgment is visualized. In addition, by taking the difference between the model that has been trained slightly
to increase the confidence level of the model's output class and the model before training, the proposed method
performs a process to emphasize the parts that contributed to the prediction and provides a better quality basis
for judgment. Experimental results confirm that the proposed method outperforms existing methods in two
evaluation metrics.
1 INTRODUCTION
In recent years, deep learning has made dramatic
progress and is being actively studied around the
world. AlexNet based on Convolutional Neural
Networks (CNNs) was a pioneer in this field. Since
AlexNet was introduced, research has been conducted
on image classification, object detection, and image
generation using CNNs. However, CNNs are opaque
in their internal operation, making it difficult to
interpret the basis for the model's decisions.
Understanding the basis for model’s decisions is
essential for achieving better accuracy and for making
important decisions such as pathological diagnosis
and object detection.
Various methods have been proposed to solve this
problem. For example, CAM weights the feature map
obtained by Global Average Pooling (GAP) to make
it easier to see the points that the CNN is focusing on.
However, this method is not applicable to models that
do not use GAP. Therefore, Grad-CAM was proposed
which substitutes the weights with the gradient.
Score-CAM was also proposed in which the weights
are obtained from the prediction probabilities. Both
methods eliminate model constraints, but they use
a
https://orcid.org/0009-0005-3644-381X
b
https://orcid.org/0000-0002-5675-8713
only the final layer to visualize the basis for decisions,
and do not take into account the presence of important
information in other layers that may be relevant to
predictions.
In this paper, the layers are selected based on the
model's prediction probability, and the basis of
judgment is visualized. In addition, by taking the
difference between the model before training and the
model that has been trained slightly to increase the
confidence level of the model's output class, we
perform a process to emphasize the parts that
contributed to the prediction and provide a better
quality basis for judgment.
In our experiments, we evaluated and discussed
the results on 3,000 images randomly selected from
the validation dataset in ImageNet, which consists of
1,000 classes of animals and vehicles, etc. We
evaluated the results using Insertion and Deletion,
and our method achieved better accuracy than the
conventional methods on both measures. The
accuracy of our method is higher than that of
conventional methods.
The paper is organized as follows. Section 2
describes related works. Section 3 describes the
details of the proposed method. Section 4 shows
370
Sannomiya, T. and Hotta, K.
Visualization of the Basis for Decisions by Selecting Layers Based on Model’s Predictions Using the Difference Between Two Networks.
DOI: 10.5220/0012419300003654
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2024), pages 370-377
ISBN: 978-989-758-684-2; ISSN: 2184-4313
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
experimental results. Section 5 describes the ablation
study. Section 6 is for conclusions and future works.
2 RELATED WORKS
In this section, we discuss related works. Section 2.1
describes Grad-CAM, and Section 2.2 describes
Score-CAM.
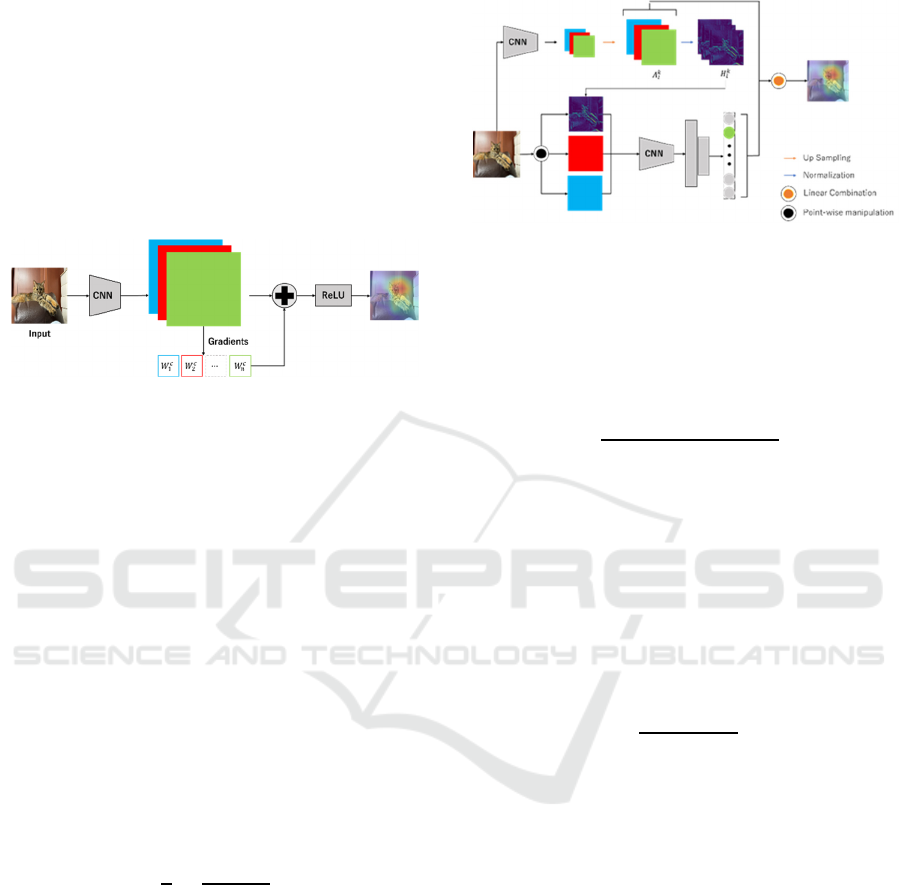
2.1 Grad-CAM
Figure 1: Overview of Grad-CAM.
Grad-CAM is a method in which the weighting
method for feature maps is replaced by gradients so
that the basis of judgment can be visualized even in
models that do not include Global Average Pooling.
An overview of Grad-CAM is shown in Figure 1.
Grad-CAM uses the gradient calculated from the
feature maps at the last layer to visualize the basis for
decisions. The blue-red-green maps in Figure 1
represent different feature maps, and the gradient is
calculated from each feature map. Grad-CAM is
computed as follows.
𝐿
𝑅𝑒𝐿𝑈𝛼
𝐴
(1)
where 𝐴
,
represents the feature map 𝐴
in the kth
channel and position 𝑖,𝑗. 𝛼
is calculated from the
gradient as follows.
𝛼
1
𝑍
𝜕𝑆
𝜕
𝑓
𝑥,𝑦
,
(2)
where Z is the normalization constant and 𝑆
represents the prediction probability of class 𝑐. 𝛼
represents how much 𝑆
changed when the pixel at
coordinate 𝑖,𝑗 in feature map 𝑘 changed. Thus, the
coordinates 𝑖,𝑗 with large 𝛼
have positive effect
on the prediction. In addition, the 𝑅𝑒𝐿𝑈 function in
equation (1) is used to cut off the negative component,
making the basis for the decision easier to understand.
However, Grad-CAM only uses information from the
final layer, so it cannot take into account the presence
of important information in other layers.
2.2 Score-CAM
Figure 2: Overview of Score-CAM.
Score-CAM is a method that replaces the weighting
of feature maps with predictive probabilities. If an
image 𝑋 is fed into the CNN and the feature map of
the 𝑘 th channel in layer 𝑙 is 𝐴
, the normalized
feature map 𝐻
is calculated as follows.
𝐻
𝐴
𝑚𝑖𝑛
𝐴
𝑚𝑎𝑥
𝐴
min
𝐴
(3)
Next, the input image multiplied by 𝐻
is fed into
the CNN, and 𝑆
is calculated from the difference
with the original image. If the predicted probability of
class 𝑐 is 𝑓
when the image is fed into the CNN,𝑆
is computed as follows.
𝑆
𝑓
𝑋 ∘ 𝐻
𝑓
𝑥 (4)
We normalize the obtained 𝑆
so that the sum is 1,
and 𝛼
is computed as follows.
𝛼
exp
𝑆
∑
exp 𝑆
(5)
By multiplying the 𝛼
to the feature map, a heat map
is obtained as shown in the following equation.
𝐿
𝑅𝑒𝐿𝑈𝛼
𝐴
(6)
Score-CAM has the same problem as Grad-CAM
because it only uses information from the final layer.
Therefore, the proposed method takes the difference
between the two networks and emphasizes the
locations that had a positive impact on the prediction
probability. It then selects a layer based on the
model's prediction probability and visualizes the basis
for the decision.
Visualization of the Basis for Decisions by Selecting Layers Based on Model’s Predictions Using the Difference Between Two Networks
371
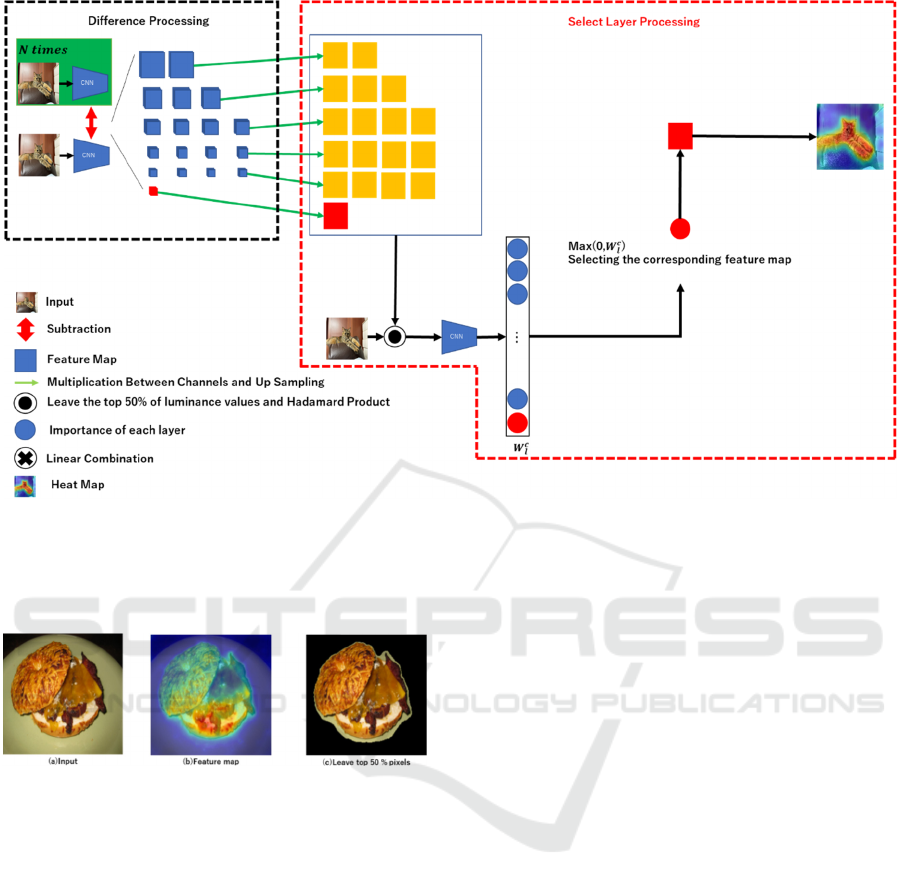
Figure 3: Overview of the proposed method.
3 PROPOSED METHOD
Figure 4: Example of top 50% of the importance W.
Figure 3 shows an overview of the proposed method.
The proposed method consists of “difference
processing” and “select layer processing”. In
difference processing, at first, an image is fed into
network, which has already been trained on the
ImageNet, and it is trained 𝑁 times so that the
probability for the predicted class increases (The area
shown as green in the upper left of Figure 3). After
that, we take the difference 𝑑
(the blue map in Figure
3) between network trained 𝑁 times and the original
network for each channel at all layers. Next, the
differenced feature map is resized to 224 224
pixels so that the image size is the same as the input
image. Although it would be desirable to consider the
relationship between channels at each layer, the
computational complexity would be enormous, so
here we summed the channels at all layers.
By this process, the yellow and red maps in Figure
3 are obtained. However, for clarity, the feature map
obtained from the final output is colored red here.
In Select Layer Processing, only the pixels in the
top 50% of the feature map values of the feature map
are kept in each layer as shown in Figure 3. They are
multiplied with the original image. This is then input
to the original network and the importance of each
feature map is calculated. If the predicted probability
of class 𝑐 is 𝑌
when the original image is input, and
the predicted probability of class 𝑐 is 𝑌
when an
image in which only the top 50% of the feature map
in layer 𝑙 is retained and multiplied with the original
image is input, the importance 𝑊
is as follows.
where 1 is added to 𝑊
to prevent the importance
from being negative.
𝑊
1𝑌
𝑌
(7)
Example of this process is shown in Figure 4.
Figure 4 (a) is an input image and (b) is the image
obtained by summing the feature maps at a certain
layer across channels. Figure 4 (c) shows the image
obtained by leaving the top 50% of the feature map
values and multiplying them with the input image.
The importance 𝑊
is obtained by creating the image
with all outputs, and it is fed into network.
Finally, only the feature map with the highest
importance 𝑊
calculated from the prediction
probability is used as the basis for the final decision.
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
372

This method allows us to take into account
information outside of the final layer while
emphasizing the areas that contributed to the
predicted probability.
4 EXPERIMENTS
4.1 Experimental Settings
In the following experiments, we used 3,000
randomly selected images from the validation set in
the ImageNet dataset. However, those images are the
same for all methods. The images were resized to
224 224 pixels and fed into the network. In this
paper, we use VGG16 as the network. In this paper,
VGG16 is used in the experiments because related
works also used it. The structure of VGG16 and
definition of “Layer” is shown in Fig.7. We define
that the first layer is layer 1 and the final layer is layer
18, and one of those layers is used for visualization.
Next, we describe the evaluation metrics. We use
Insertion and Deletion. Insertion is an evaluation
metric that measures the increase in the model's
prediction probability when pixels are inserted in the
order of the magnitude in the visualization image.
This metric measures the increase in the model's
predictive probability as more pixels are inserted,
with a higher AUC (area under the probability curve)
indicating a more adequate explanation.
Deletion is a metric that measures the degree to
which the model's predictive probability decreases as
pixels are removed from the visualization image in
order of increasing high value of visualization image.
This metric measures the decrease in the model's
predictive probability as more pixels are removed.
Lower AUC curve indicates a better explanation.
4.2 Experimental Results
Table1: Comparison results.
Metho
d
Insertion [%] Deletion [%]
Grad-CAM 36.00 5.43
Score-CAM 36.69 5.21
Ours 40.21 4.79
Comparison results between Grad-CAM, Score-
CAM, and the proposed method are shown in Table
1. The best results are shown in red. We see that the
proposed method improves the accuracy of Insertion
by 4.21% and 3.52% compared to Grad-CAM and
Score-CAM. In Deletion, the proposed method
improves accuracy by 0.64% and 0.42%,
Figure 5: Definition of "Layer" of VGG16 in this paper.
respectively. We will discuss the factors behind the
improvement in accuracy using the visualization
results. Figure 6 and 7 shows an example of
visualization results and the Insertion Curve and
Deletion Curve for the visualization results to confirm
whether the basis for judgment can be visualized.
Here, "Layer" under "Ours" indicates the number of
the layer used. The definition of “Layer” is already
shown in Figure 5. As shown in Figure 6 and 7, we
see that from (a) to (e) provide better quality
visualization than the other methods. In particular, (a)
and (e) show an earlier increase in prediction
probability for the Insertion Curve and an earlier
decrease in prediction probability for the Deletion
Curve compared to the other methods. The
visualization results show that the model is more
successful than the other method. This can be
attributed to the fact that the layer selection was
performed based on the prediction probability, after
taking the difference between the two networks and
highlighting the areas that had a positive impact on
the prediction probability. The relationship between
difference processing and accuracy is discussed in the
Section 5.
5 ABLATION STUDY
In this section, we investigate the utilization rate of
each layer and the validity of the difference of two
networks as an Ablation Study.
5.1 Effectiveness of Difference
Table 2: Comparison of accuracy w/o the difference.
Metho
d
Insertion [%] Deletion [%]
Score-CAM 36.69 5.21
Score-CAM
w/ difference
39.04 5.00
Ours w/o
difference
36.51 4.83
Ours 40.21 4.79
This section investigates whether the difference of
two networks contributes to improve the accuracy.
Visualization of the Basis for Decisions by Selecting Layers Based on Model’s Predictions Using the Difference Between Two Networks
373
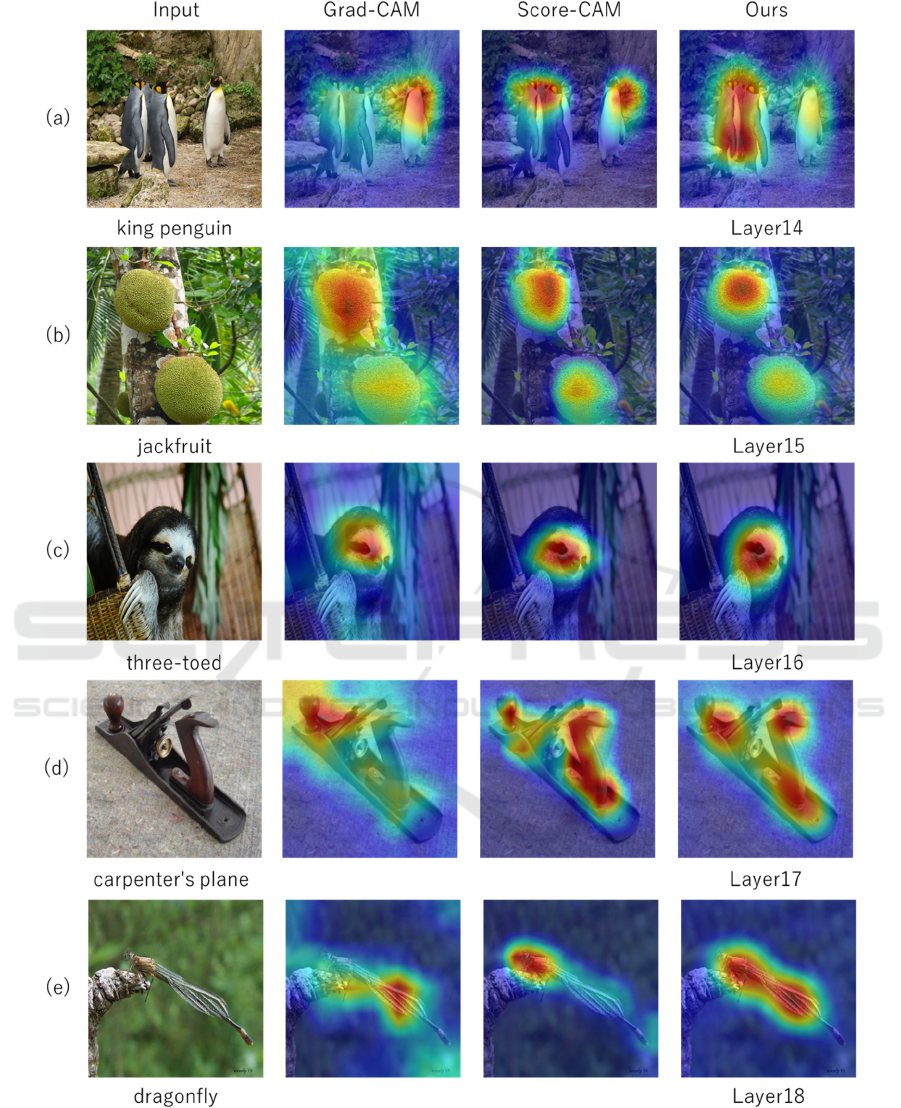
Figure 6: Visualization results by each method.
The results are shown in Table 2. Table 2 shows the
results of the proposed method with and without the
difference of two networks. When the difference
processing is eliminated from the proposed method,
the accuracy of Insertion and Deletion decreases by
3.7% and 0.04%. This shows the effectiveness of the
difference of two networks.
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
374
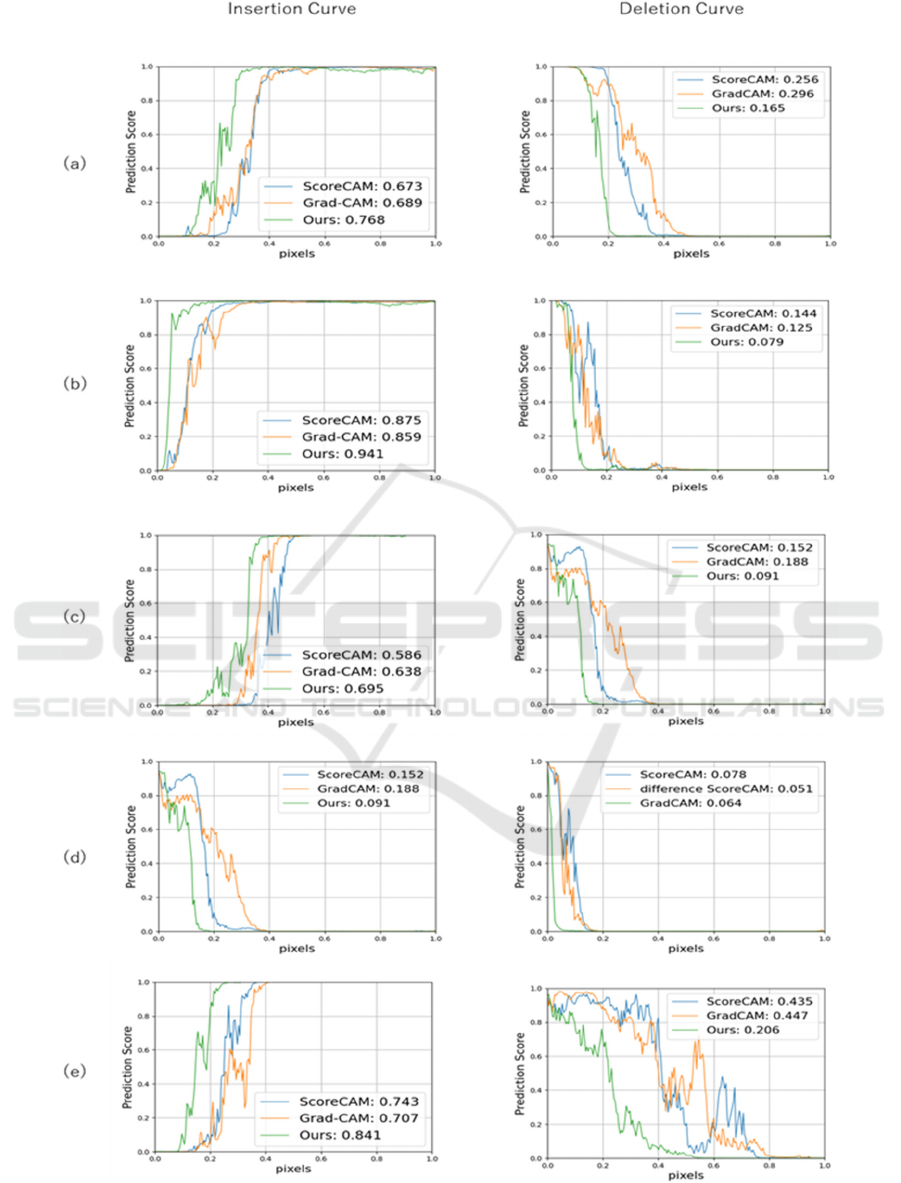
Figure 7: Insertion curve and Deletion curve by each method.
Visualization of the Basis for Decisions by Selecting Layers Based on Model’s Predictions Using the Difference Between Two Networks
375
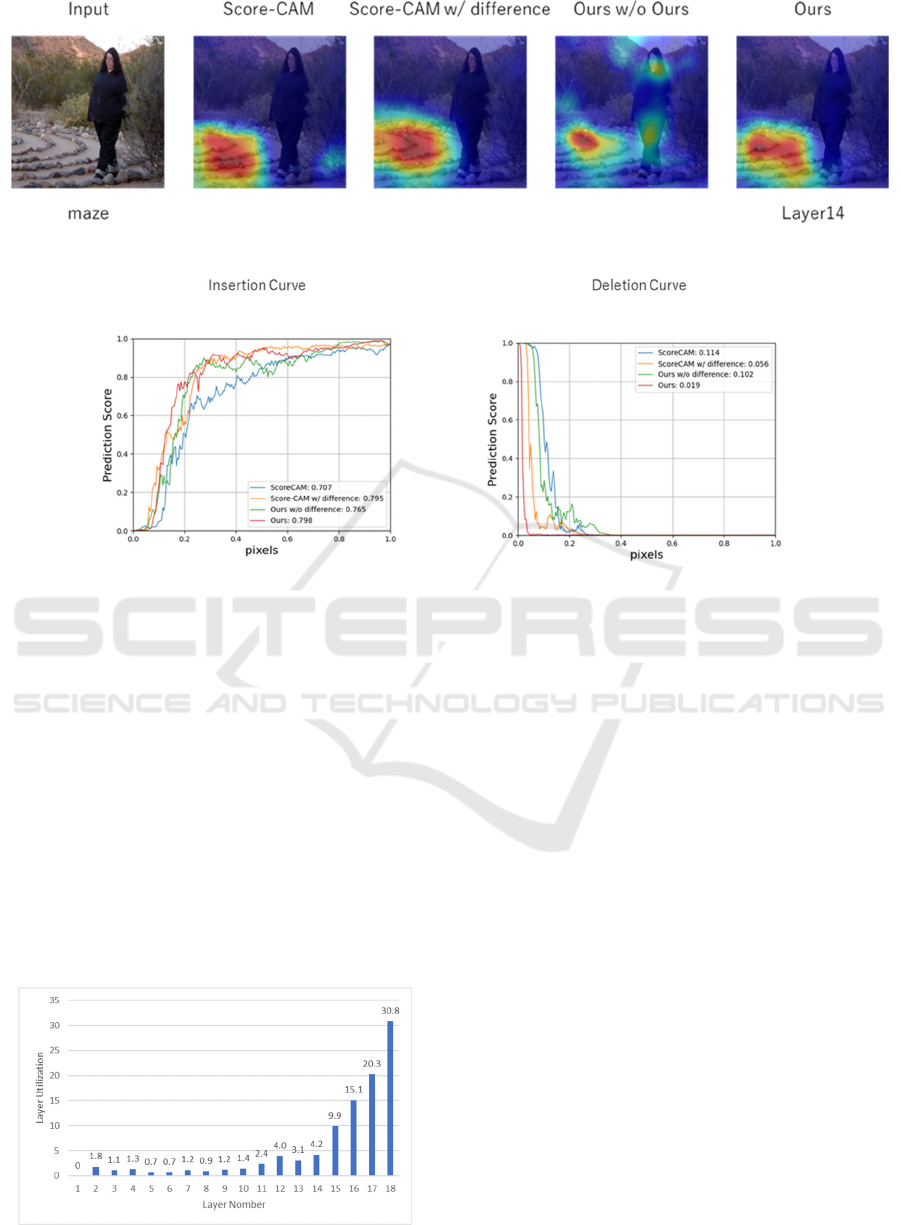
Figure 8: Comparison of accuracy with and without difference.
Figure 9: Comparison of Insertion Curve and Deletion Curve with and without difference.
We also show the accuracy of Score-CAM with
and without the difference. When difference
processing is applied to Score-CAM, the accuracy
improved by 2.35% for Insertion and 0.21% for
Deletion. respectively. This is because the difference
between two networks can emphasize the points that
contribute to classification.
Figure 8 and 9 also shows that difference
processing improved the quality of the visualization
by preventing the heatmap from going to locations
other than the objects predicted by the model.
Therefore, we see that difference of two networks
contributes to improve the accuracy.
5.2 Utilization Rates of Each Layer
Figure 10: Utilization rates of each layer.
In this section, we investigate the utilization of each
layer. The same 3,000 images from the ImageNet
validation set as section 4 are used to show the
utilization of each layer. Figure 10 shows that layers
other than the final layer are also used. Note that the
definition of “Layer” is shown in Figure 5. Figure 10
indicates that the important information for prediction
is not always in the final layer. Conventional methods
such as Grad-CAM and Score-CAM used the
information from only the final layer, but the
proposed method selects layers based on prediction
probability rather than only the final layer, and this
derived better visualization results.
6 CONCLUSIONS
Conventional methods for visualization of the basis
for decision making use only the final layer for
visualization, and they do not take into account
important information hidden in other layers that are
relevant to classification. In this paper, we propose a
method to take into account important information
hidden in layers other than the final layer by selecting
layers based on the prediction probability of the
model, while highlighting the parts that contributed to
the prediction by taking the difference between the
ICPRAM 2024 - 13th International Conference on Pattern Recognition Applications and Methods
376

original model and the model that was trained slightly
to increase the confidence level of the output class.
As a result, we achieved the accuracy improvement in
two evaluation measures. The visualization results
also confirmed that the visualization of the basis for
decision-making was of better quality than that of
existing methods.
ACKNOWLEDGEMENTS
This research is partially supported by JSPS
KAKENHI Grant Number 22H04735.
REFERENCES
Krizhevsky, A., Sutskever, I., & Hinton, G. E. (2012).
Imagenet classification with deep convolutional neural
networks. Advances in Neural Information Processing
Systems, pp. 1097-1105.
LeCun, Y., Boser, B., Denker, J. S., Henderson, D.,
Howard, R. E., Hubbard, W., & Jackel, L. D. (1989).
Backpropagation Applied to Handwritten Zip Code
Recognition. Neural Computation, 1(4), pp. 541-551.
Wang, F., Jiang, M., Qian, C., Yang, S., Li, C., Zhang, H.,
... & Tang, X. (2017). Residual Attention Network for
Image Classification. In Proceedings of The IEEE
Conference on Computer Vision and Pattern
Recognition, pp. 3156-3164.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S.,
Anguelov, D., ... & Rabinovich, A. (2015). Going
Deeper with Convolutions. In Proceedings of The IEEE
Conference on Computer Vision and Pattern
Recognition, pp. 1-9.
Liu, W., Anguelov, D., Erhan, D., Szegedy, C., & Reed, S.,
(2016) SSD: Single Shot Multibox Detector.
In Proceedings of European Conference on Computer
Vision, pp. 21-37.
Redmon, J., Divvala, S., Girshick, R., & Farhadi, A. (2016).
You only look once: Unified, Real-Time Object
Detection. In Proceedings of The IEEE Conference on
Computer Vision and Pattern Recognition, pp. 779-788.
Redmon, J., & Farhadi, A. (2017). YOLO9000: Better,
Faster, Stronger. In Proceedings of The IEEE
Conference on Computer Vision and Pattern
Recognition, pp. 7263-7271.
Girshick, R., Donahue, J., Darrell, T., & Malik, J. (2014).
Rich feature hierarchies for accurate object detection
and semantic segmentation. In Proceedings of The
IEEE Conference on Computer Vision and Pattern
Recognition, pp. 580-587.
Girshick, R. (2015). Fast R-CNN. In Proceedings of The
IEEE International Conference on Computer Vision, pp.
1440-1448.
Goodfellow, I., Pouget-Abadie, J., Mirza, M., Xu, B.,
Warde-Farley, D., Ozair, S., ... & Bengio, Y. (2014).
Generative Adversarial Nets. Advances in Neural
sInformation Processing Systems, pp. 2672-2680.
Radford, A., Metz, L., & Chintala, S. (2015). Unsupervised
Representation Learning with Deep Convolutional
Generative Adversarial Networks. In Proceedings of
The International Conference on Learning
Representations.
Isola, P., Zhu, J. Y., Zhou, T., & Efros, A. A. (2017). Image-
to-Image Translation with Conditional Adversarial
Networks. In Proceedings of The IEEE Conference on
Computer Vision and Pattern Recognition, pp. 1125-
1134.
Zhou, B., Khosla, A., Lapedriza, A., Oliva, A., & Torralba,
A. (2016). Learning Deep Features for Discriminative
Localization. In Proceedings of The IEEE Conference
on Computer Vision and Pattern Recognition, pp.
2921-2929.
Selvaraju, R. R., Cogswell, M., Das, A., Vedantam, R.,
Parikh, D., & Batra, D. (2017). Grad-cam: Visual
Explanations from Deep Networks via Gradient-based
Localization. In Proceedings of The IEEE International
Conference on Computer Vision, pp. 618-626.
Wang, H., Wang, Z., Du, M., Yang, F., Zhang, Z., Ding,
S., ... & Hu, X. (2020). Score-CAM: Score-Weighted
Visual Explanations for Convolutional Neural
Networks. In Proceedings of The IEEE/CVF
Conference on Computer Vision and Pattern
Recognition Workshops, pp. 24-25.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh, S.,
Ma, S., ... & Fei-Fei, L. (2015). Imagenet Large Scale
Visual Recognition Challenge. International Journal of
Computer Vision, Vol.115, pp. 211-252.
Visualization of the Basis for Decisions by Selecting Layers Based on Model’s Predictions Using the Difference Between Two Networks
377
