
Multi-Server Queue, with Heterogeneous Service Valuations Induced by
Travel Costs
Itzhak Moshkovitz
1
, Irit Nowik
2 a
and Yair Shaki
2
1
Department of Applied Mathematics, Ariel University, Ariel, Israel
2
Department of Industrial Engineering and Management,
Jerusalem College of Technology, Jerusalem, Israel
Keywords:
Queuing, Travel Costs, Observable Queue, Social Welfare, Nash Equilibrium.
Abstract:
This work presents a variation of Naor’s strategic observable model (Naor, 1969) for a loss system M/G/2/2,
with a heterogeneous service valuations induced by the location of customers in relation to two servers, A,
located at the origin, and B, located at M. Customers incur a “travel cost” which depends linearly on the
distance of the customer from the server. Arrival of customers is assumed to be Poisson with a rate that is the
integral of a nonnegative intensity function. We find the Nash equilibrium threshold strategy of the customers,
and formulate the conditions that determine the optimal social welfare strategy. For the symmetric case (i.e.,
both servers have the same parameters and the intensity function is symmetric), we find the socially optimal
strategies; Interestingly, we find that when only one server is idle, then under social optimality, the server also
serves far away consumers, consumers whom he would not serve if he was a single server (i.e., in M/M/1/1).
1 INTRODUCTION
Customers of a service system often have heteroge-
neous service valuations, and this heterogeneity may
be caused by various reasons. In this paper, we study
a model with two servers, each located at a differ-
ent site, therefore a consumer (in general) incures
different “travel costs” when arriving at each service
site. In such circumstances, customers need to decide
whether to arrive for service, and if so, to what service
point to arrive. A realistic example may be that of a
network of public schools, hospitals, etc., from which
an individual needs to choose. Of course “location”
may refer to a geographic location or it may serve as
a metaphoric way expressing different preferences on
the ideal type of service.
The performance of service systems with strate-
gic customers has attracted much attention in recent
years (see, for example, Hassin & Haviv, 2003; Has-
sin, 2016). Naor (1969), was the first to introduce a
queueing model that describes customer rational de-
cisions. The model considers an FCFS M/M/1 sys-
tem with homogeneous customers, a fixed reward as-
sociated with service completion, and linear waiting
costs. The Nash equilibrium solution in Naor’s model
a
https://orcid.org/0000-0002-9257-8349
is simple since there exists a dominant pure threshold
strategy n
e
, such that an arriving customer joins the
queue if and only if the observed queue upon arrival
is shorter than n
e
. This strategy maximizes the indi-
vidual’s expected welfare regardless of the strategies
adopted by the others. The socially-optimal behavior
is also characterized by a pure threshold strategy n
∗
,
such that n
∗
≤ n
e
.
Naor assumes that customers are homogeneous
with respect to service valuation, and much of the
literature on observable queues (i.e., assuming cus-
tomers know the queue length before joining it) fol-
low this assumption. Some exceptions are described
in Section 2.5 of Hassin & Haviv (2003). For ex-
ample, Larsen (1998) assumes that the service value
is a continuous random variable and proves that the
profits and social welfare are unimodal functions of
the price. For the case of a loss system (where cus-
tomers join iff the server is idle), Larsen proves that
the profit-maximizing fee exceeds the socially opti-
mal fee. Miller and Buckman (1987) consider an
M/M/s/s loss system with heterogeneous service val-
ues and characterize the socially optimal fee.
Some authors investigated the price of anarchy
(PoA) in various service systems (see, for example,
Koutsoupias & Papadimitriou, 1999; Mavronicolas
& Spirakis, 2001; Hassin, 2016). The price of an-
Moshkovitz, I., Nowik, I. and Shaki, Y.
Multi-Server Queue, with Heterogeneous Service Valuations Induced by Travel Costs.
DOI: 10.5220/0012419100003639
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 13th International Conference on Operations Research and Enterprise Systems (ICORES 2024), pages 133-145
ISBN: 978-989-758-681-1; ISSN: 2184-4372
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
133

archy measures the inefficiency of selfish behavior.
It is defined as the ratio of the social welfare un-
der optimum to the Social welfare in equilibrium.
In Gilboa-Freedman, Hassin and Kerner (2014), the
PoA in Naor’s model is shown to have an odd behav-
ior. It increases sharply (from 1.5 to 2) as the arrival
rate comes close to the service rate and becomes un-
bounded exactly when the arrival rate is greater than
the service rate, which is odd since the system is al-
ways stable.
Most relevant to our work is the work of Hassin,
Nowik and Shaki (2018), in which heterogeneity in
service valuation is introduced through a Hotelling-
type model where customers reside in a “linear city”
and incur “transportation costs” from their locations
to the location of the server. Similar models have
been investigated (e.g. D’aspremont & Jaskold,
1979; Dobson & Stavrulaki, 2007; Economides,
1986; Gallay, Olivier and Max-Olivier Hongler, 2008;
Hotelling, 1929; Kwasnica & Euthemia, 2008; Pang-
burn & Stavrulaki, 2008; Ray & Jewkes, 2004; §6.7
and §7.5 in Hassin, 2016) but they all assume a con-
stant density (possibly restricted to an interval). In
contrast, Hassin, Nowik and Shaki allow non-uniform
distributions of customer locations, and the potential
arrival of customers with distances less than x from
the service facility is assumed to be distributed ac-
cording to Poisson with rate λ(x) =
R
x
0
h(y)dy < ∞,
where h(y) is a nonnegative “intensity” function of
the distance y. The definition of λ(x) by an integral is
natural since the customers accumulate from location
0, to location x. The intensity function and (linear)
travel costs jointly generate the distribution of cus-
tomer service valuations. A simple example is a two-
dimensional city, in which the arrival of customers is
uniform. In this case the intensity function can be de-
fined as h(x) = 2πx, and so the arrival of customers
with distances less than x is assumed to be a Poisson
process with rate λ(x) =
R
x
0
2πydy = πx
2
. In a loss
system M/G/1/1, Hassin, Nowik and Shaki (2018) de-
fine the threshold Nash equilibrium strategy x
e
and the
socially-optimal threshold strategy x
∗
. They investi-
gate the dependence of the PoA on the parameter x
e
and the intensity function h. They develop an explicit
formula to calculate lim
x
e
→∞
PoA(h,x
e
) when it exists.
As in Gilboa-Freedman, Hassin and Kerner
(2014), the number 2 arrises repeatadely in several
results of Hassin, Nowik and Shaki (2018), relating
to the limit of PoA when x
e
, goes to infinity. For
instance, if h converges to a positive constant then
PoA converges to 2; if h increases (decreases) then
the limit of PoA is at least (at most) 2. In a system
with a queue they prove that PoA may be unbounded
already in the simplest case of uniform arrival.
The goal of this work is to extend Hassin, Nowik
and Shaki’s model to the case of two servers (instead
of a single server), where server A is located at the
origin and server B is located at a point denoted as
M. If the servers’ points are distsnce from each other
then the system is just a combination of two single-
server systems. It becomes more interesting when the
servers are closer, creating a dilemma for some con-
sumers regarding what service point to arrive at.
The value of information sharing between service
providers lies in its capacity to enhance coordination,
optimize resource allocation, and improve overall sys-
tem efficiency. When service providers have common
knowledge about each other’s status, they can collab-
orate more effectively, leading to a better distribution
of workloads and resources. This coordination of-
ten results in increased efficiency, reduced response
times, and improved service quality. The ability to
access real-time information about the status of other
providers allows for more informed decision-making,
enabling adaptive strategies that respond dynamically
to changing conditions. Ultimately, the value of such
information is reflected in its power to streamline op-
erations, enhance service delivery, and contribute to
a more resilient and responsive system. Think for
example of Air Traffic Control Towers; In a situa-
tion where two air traffic control towers manage ad-
jacent airspaces and are aware of each other’s work-
load, they can coordinate and optimize the allocation
of incoming flights. If one tower is busy, the other
can efficiently handle additional aircraft to maintain
smoother air traffic operations. Another example is
of a hospital with two emergency rooms, if each ER
is aware of the patient load and occupancy status of
the other, medical staff can coordinate patient assign-
ments. Deo and Gurvich (2011) consider a routing
problem motivated by the diversion of ambulances to
neighboring hospitals. These examples illustrate situ-
ations where the level of information sharing between
service providers can significantly impact their abil-
ity to optimize resource allocation and overall system
efficiency.
2 THE M/G/1/1 MODEL:
NOTATIONS AND
FUNDEMENTAL RESULTS
In the model of one server, for all x ≥ 0, customers
with distances less than x, arrive to the system accord-
ing to a Poisson process with rate λ(x) =
x
R
0
h(y)dy,
where h(y) is an intensity function. The service dis-
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
134

tribution is general with average rate µ and the benefit
from a service is R. There is a waiting cost c
w
per
unit time while in the system and a traveling cost of
c
t
per unit distance. The optimal (individual) strategy
of a customer located at a distance x from the origin,
is to enter service if the server is idle and the utility
is positive, namely: R ≥
c
w
µ
+ c
t
x. This implies that
under individual optimization, a consumer located at
a distance x from the origin, is to enter service iff the
server is idle and
x ≤
R − c
w
/µ
c
t
.
Denote v =
R−c
w
/µ
c
t
. (Note that the optimal individ-
ual threshold strategy is denoted in Hassin, Nowik
and Shaki (2018), as x
e
, and in this paper as v.).
Hence there is a unique individual optimal strategy
(i.e., Nash equilibrium): v =
R−c
w
/µ
c
t
. Under this strat-
egy, a customer located at a distance x, enters service
iff the server is idle and x ≤ v.
The utility of a customer entering service from lo-
cation x is: R − c
w
/µ − c
t
x = c
t
(v − x). The balance
equation for the probability π
0
(x), of an idle server
satisfies:
π
0
(x)λ(x) = (1 − π
0
(x))µ.
This implies that:
π
0
(x) =
1
1 + ρ(x)
=
1
1 +
1
µ
x
R
0
h(y)dy
,
where ρ(x) = λ(x)/µ.
The expected social benefit per unit of time asso-
ciated with threshold x satisfies
S
1
(x) = c
t
Z
x
0
(v − y)h(y)π
0
(x)dy =
c
t
R
x
0
(v − y)h(y)dy
1 +
1
µ
R
x
0
h(y)dy
.
(1)
Let x
∗
be the threshold strategy that maximizes social
welfare. Under this strategy, only consumers with dis-
tances less than x
∗
, will enter the system. It is shown
in Hassin, Nowik and Shaki (2018), that;
x
∗
< v,
and that given v, the optimal threshold strategy x
∗
is
unique and satisfies,
v =
1
µ
Z
x
∗
0
(x
∗
− y)h(y)dy + x
∗
, (2)
(see Proposition 3.1 in Hassin, Nowik and Shaki
(2018)).
3 THE M/G/2/2 MODEL
3.1 Model Description
We consider two servers A and B on the interval
[0,M]. A is located at the origin, and B is located at
a point M. The model makes the following assump-
tions:
1. All customers reside on the interval [0,M].
2. The arrivals to the servers follow a Poisson
process with rates defined according to a given
‘intensity function’ h, defined over the inter-
val [0,M]. For any x, if consumers from in-
terval [0, x], turn to server A, then the arrival
rate from that interval is λ
A
(x) =
R
x
0
h(y)dy.
Similarily, for any x, if consumers from inter-
val [x,M], turn to server B, then the arrival rate
from that interval is λ
B
(x) =
R
M
x
h(y)dy.
3. The intensity function h may be any nonnega-
tive function for which
1
R
0
h(y)dy is finite for all
x ≥ 0.
4. Customers know their distance from each of
the two servers.
5. The status of the servers is observable.
6. Customers are risk neutral, maximizing ex-
pected net benefit.
7. The service distribution of servers A and B,
is exponentially with rate µ
A
, and µ
B
, respec-
tively. The system is a loss system.
8. The benefit from a completed service is R.
9. The waiting cost is c
w
per unit time (while in
the system).
10. The traveling cost to servers A and B are c
A
t
and
c
B
t
, respectively, per unit distance, and travel-
ing is instantaneous.
11. All processes are mutually independent.
12. The decision of the customer is whether to en-
ter to service and if so then which of the servers
to turn to.
The states of the system are denoted with (i, j), i, j ∈
{0,1}, where i = 0 means that server A is free, and
i = 1 means that Server A is busy. The same for j and
server B.
For State (0,0), let x
A00
, and x
B00
, be the arrival
thresholds, for servers A and B respectively. Namely,
if both servers are idle, then consumers with loca-
tions closer to the origin than x
A00
, (i.e., with loca-
tions x, s.t., x ≤ x
A00
), turn to server A, and similar-
ily, consumers with locations closer to M than x
B00
,
Multi-Server Queue, with Heterogeneous Service Valuations Induced by Travel Costs
135

(i.e., with locations x, s.t., x ≥ x
B00
), turn to server
B. For State (0,1), let x
A01
be the arrival threshold,
from which we allow consumers to arrive to Server A,
when Server B is busy, and similarly for state (1,0),
let x
B10
be the arrival threshold, from which we al-
low consumers to arrive to Server B, when Server A
is busy.
Every strategy is described by 4-dimensional vec-
tor
−→
x = (x
A00
,x
A01
,x
B00
,x
B10
).
For the strategy to be well defined, it is necessary
that,
x
A00
≤ x
B00
, (3)
since if x
B00
< x
A00
, then when both servers are idle,
consumers that are located between x
B00
and x
A00
,
should turn to server A according to x
A00
, but accord-
ing to x
B00
they should turn to server B.
Given
−→
x , denote π
i j
(
−→
x ), i, j ∈ {0,1}, as the
probability that the system is in state (i, j), i, j ∈
{0,1}.
In the following sections, we consider individual
and socially optimal strategies.
4 INDIVIDUAL OPTIMIZATION
Assume for the moment that only one server is idle
(i.e., state (0, 1) or state (1, 0)). Then the optimal
strategy of a customer located at a distance x from
server A (at a distance M − x from server B), is to ar-
rive to server A (server B) if server A (server B) is idle
and R ≥
c
w
µ
A
+ c
A
t
x (R ≥
c
w
µ
B
− c
B
t
(M − x
B
e
)). In other
words, the threshold strategies are:
v
A
=
R − c
w
/µ
A
c
A
t
, and v
B
= M −
R − c
w
/µ
B
c
B
t
. (4)
For state (0,0), we need to relate separately to two
cases; v
A
≤ v
B
, (case 1), and v
A
> v
B
, (case 2).
4.1 Case 1. v
A
≤ v
B
In this case, which is illustrated by Figure 1, every
customer between the origin and v
A
will turn to server
A, if he is idle, and every customer between v
B
and M
will turn to server B, if he is idle. The customers be-
tween v
A
and v
B
will not turn to any server (as their
utility is negative when turning to either server). In
fact, since the intervals [0,v
A
] and intervals [v
B
,M]
are disjoint, our system is equivalent to two indepen-
dent service systems. Therefore, the individual opti-
mal strategy (i.e., Nash equilibrium) is:
−→
x
E
= (x
A00
,x
A01
,x
B00
,x
B10
) = (v
A
,v
A
,v
B
,v
B
).
Server A
0
v
A
v
B
Server B
M
Figure 1: v
A
≤ v
B
.
4.2 Case 2. v
A
> v
B
In this case, which is illustrated by Figure 2, if only
server A is idle, consumers located between the ori-
gin and v
A
will turn to server A. If only server B is
idle consumers located between v
B
and M will turn
to server B. However, if both servers are idle, con-
sumers located between the origin and v
B
will turn to
server A, and customers located between v
A
and M
will turn to server B. But customers located in the in-
terval [v
B
,v
A
] may potentially go to either server A or
B, (since the utility by going to either server, is posi-
tive). Thus, the optimizing individual strategy would
be turnning to the server which yields the greatest util-
ity for the consumer.
Server A
0
v
B
v
A
Server B
M
Figure 2: v
B
< v
A
.
If the customer turns to A, his benefit will be
R −
c
w
µ
A
+ c
A
t
x = c
A
t
(v
A
− x), whereas if he turns to B,
his benefit will be R −
c
w
µ
B
− c
B
t
(M − x) = c
B
t
(x − v
B
).
Consequently, if
c
B
t
(x − v
B
) < c
A
t
(v
A
− x), (5)
the customer will turn to A. The above is equivalent
to
x <
(c
A
t
v
A
+ c
B
t
v
B
)
(c
A
t
+ c
B
t
)
. (6)
Substituting v
A
and v
B
, from (4), in (6), we get
x <
c
B
t
M + c
w
1
µ
B
−
1
µ
A
(c
A
t
+ c
B
t
)
.
Denote v
T
=
c
B
t
M+c
w
1
µ
B
−
1
µ
A
(c
A
t
+c
B
t
)
, then a customer lo-
cated at x, and observes that the two servers are idle,
will turn to A if his location x, satisfies x < v
T
, and
otherwise, will turn to B. Hence, the individual opti-
mal strategy in this case is,
−→
x
E
= (x
A00
,x
A01
,x
B00
,x
B10
) = (v
T
,v
A
,v
T
,v
B
).
Note that in the special case, in which c
A
t
= c
B
t
, and
µ
A
= µ
B
, then the individual optimal strategy is:
−→
x
E
= (
M
2
,v
A
,
M
2
,M − v
A
). (7)
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
136
5 SOCIALLY OPTIMAL
STRATEGY
Under social optimality, the mutual influences of ac-
tions chosen by the players must be taken into con-
sideration. These influences are not trivial. For exam-
ple, given
−→
x = (x
A00
,x
A01
,x
B00
,x
B10
), if we increase
x
A00
, to include consumers that are further away from
server A but still have positive utility (namely their
location x, satisfies x
A00
< x < v
A
), then, on one hand
it may increase the social welfare function since con-
sumers that are further away from server A will now
get service. But on the otherhand, we may lose some
of the closer, (thus more valuable), consumers that
may find the server busy more often than before and
this may reduce the social welfare function.
Recall that the arrivals to server A from [0,x] fol-
low a Poisson process with rate of λ
A
(x) =
R
x
0
h(y)dy,
and the arrivals to server B from [x,M] follow a Pois-
son process with rate of λ
B
(x) =
R
M
x
h(y)dy, where h
is the intensity function. Also recall that π
i j
(
−→
x ), is
the probability that the system is in state (i, j) when
−→
x = (x
A00
,x
A01
,x
B00
,x
B10
). Given
−→
x , the transition
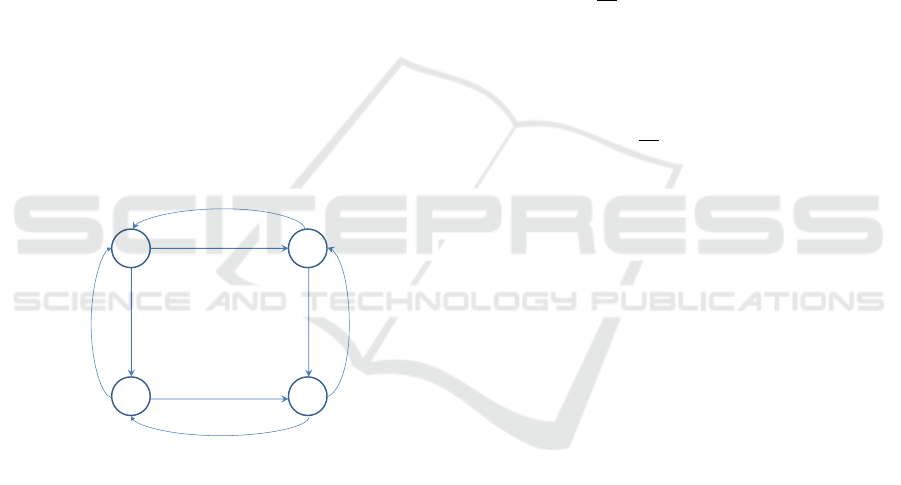
diagram is presented in Figure 3.
0,1
1,1
0,0 1,0
𝜆
B
ሺ
𝑥
B00
ሻ
B
B
𝜆
𝐴
ሺ
𝑥
𝐴00
ሻ
A
𝜆
B
ሺ
𝑥
B10
ሻ
A
𝜆
𝐴
ሺ
𝑥
A01
ሻ
Figure 3: Transition Diagram.
In order to find the steady-state probabilities, we
need to solve the following balance equation system:
1) µ
B
π
01
+ µ
A
π
10
= [λ
A
(x
A00
) + λ
B
(x
B00
)]π
00
2) µ
B
π
11
+ λ
A
(x
A00
)π
00
= [λ
B
(x
B10
) + µ
A
]π
10
3) λ
B
(x
B10
)π
10
+ λ
A
(x
A01
)π
01
= [µ
A
+ µ
B
]π
11
4) π
00
+ π
10
+ π
01
+ π
11
= 1.
(8)
Let S(
−→
x ) = S(x
A00
,x
A01
,x
B00
,x
B10
) denote the social
welfare function. We have
S(
−→
x ) = π
00
(
−→
x )
Z
x
A00
0
c
A
t
(v
A
− y)h(y)dy+
π
01
(
−→
x )
Z
x
A01
0
c
A
t
(v
A
− y)h(y)dy+
π
00
(
−→
x )
Z
M
x
B00
c
B
t
(y − v
B
)h(y)dy+
π
10
(
−→
x )
Z
M
x
B10
c
B
t
(y − v
B
)h(y)dy.
(9)
We wish to find:
−→
x
∗
= (x
∗
A00
,x
∗
A01
,x
∗
B00
,x
∗
B10
) that
maximizes the social Welfare function S. Recall first
the model with a single server (see Section 2). Ac-
cording to (2), if server A was a single server, located
at the origin, then the optimal threshold strategy x
∗
A
is
unique and satisfies,
v
A
=
1
µ
A
Z
x
∗
A
0
(x
∗
A
− y)h(y)dy + x
∗
A
. (10)
Similarly, if server B was a single server, located at
M, then the optimal threshold strategy x
∗
B
is unique
and satisfies,
v
B
= x
∗
B
−
1
µ
B
Z
M
x
∗
B
(y − x
∗
B
)h(y)dy. (11)
The values of x
∗
A
and x
∗
B
depend on the parameters
of the model and on the intensity function h. Under
some conditions, x
∗
A
≤ x
∗
B
, (Case A), and under other
conditions, x
∗
A
> x
∗
B
, (Case B).
As we show in the sequal, x
∗
A
and x
∗
B
, although
originated in the single server mode, nevertheless play
a significant role in the model with two servers.
For simplicity, we assume from now on that
servers have the same capacity. Additionally, We nor-
malize all other parameters according to this common
capacity hence
µ
A
= µ
B
= 1.
Lemma 5.1. For all 0 < x < v,
• If x < x
∗
A
, then
R
x
0
(v − y)h(y)dy < (λ
A
(x) + 1)(v − x)
• If x = x
∗
A
, then
R
x
0
(v − y)h(y)dy = (λ
A
(x) + 1)(v − x)
• If x > x
∗
A
, then
R
x
0
(v − y)h(y)dy > (λ
A
(x) + 1)(v − x)
Proof. Note that,
Z
x
0
(v − y)h(y)dy =
Z
x
0
(v − x + x − y)h(y)dy =
(v − x)λ
A
(x) +
Z
x
0
(x − y)h(y)dy.
(12)
Multi-Server Queue, with Heterogeneous Service Valuations Induced by Travel Costs
137

It follows that,
Z
x
0
(v − y)h(y)dy =
(v − x)λ
A
(x) − x +
h
x +
Z
x
0
(x − y)h(y)dy
i
. (13)
By (10), x
∗
A
satisfies,
v = x
∗
A
+
Z
x
∗
A
0
(x
∗
A
− y)h(y)dy. (14)
Thus, substituting x = x
∗
A
in (13), we get:
Z
x
∗
A
0
(v − y)h(y)dy = (v − x
∗
A
)λ
A
(x
∗
A
) − x
∗
A
+ v
= (λ
A
(x
∗
A
) + 1)(v − x
∗
A
), (15)
proving the second statement of the lemma. Note that
x +
R
x
0
(x − y)h(y)dy, appearing in the square brackets
at the right hand side of (13) is increasing in x, hence
it follows from (14) that:
• For x < x
∗
A
,
Z
x
0
(v − y)h(y)dy < (v − x)λ
A
(x) − x + v
= (λ
A
(x) + 1)(v − x), (16)
and,
• For x > x
∗
A
,
Z
x
0
(v − y)h(y)dy < (v − x)λ
A
(x) − x + v
= (λ
A
(x) + 1)(v − x), (17)
proving the first and last statements of the lemma.
A similar lemma, regarding server B is:
Lemma 5.2. For all v < x < M,
• If x < x
∗
B
, then
R
M
x
(y − v)h(y)dy > (λ
B
(x) + 1)(x − v).
• If x = x
∗
B
, then
R
M
x
(y − v)h(y)dy = (λ
B
(x) + 1)(x − v).
• If x > x
∗
B
, then
R
M
x
(y − v)h(y)dy < (λ
B
(x) + 1)(x − v).
5.1 Socially Optimal Strategies in the
Symmetric Case
In this section we assume that the model is completely
symmetric with regards to the two servers. We will
show that in case A (namely when x
∗
A
≤ x
∗
B
), con-
sumers with distances that are less than x
∗
A
from server
A, turn to server A in any case (wheather server B
is avilable or not). Similarly, consumers with dis-
tances that are less than x
∗
A
from server B (i.e., their
location is M − x
∗
A
and beyond) turn to server B. In
Case B (namely when x
∗
A
> x
∗
B
), we will show that
if both servers are available, then server A serves
consumers with locations between 0 and M/2, and
server B serves consumers from that point on (until
the end of the interval [0,M]). Interestingly, if only
one server is available, say server A, then she serves
consumers with distances that are beyond x
∗
A
, which
was the service-threshold when server A was the only
server in a single-server system.
We assume that,
• A1. h(M − y) = h(y), ∀0 ≤ y ≤ M.
• A2. c
A
t
= c
B
t
, thus travel cost is simply c
t
.
The following 4 properties follow,
• P1. v
B
= M − v
A
. We denote v = v
A
.
• P2. x
∗
B
= M − x
∗
A
.
• P3. x
∗
B10
= M − x
∗
A01
.
• P4. x
∗
B00
= M − x
∗
A00
.
Recall that in all cases (including the general non-
symmetric case), x
A00
≤ x
B00
, (see (3)). This together
with P4 above gives in the symmetric case
x
∗
A00
≤
M
2
. (18)
Lemma 5.3. In the symmetric case, for all 0 ≤ x ≤ M,
λ
B
(M − x) = λ
A
(x).
Proof. By A1,
λ
B
(M − x) =
Z
M
M−x
h(u)du =
Z
x
0
h(M − u)du =
Z
x
0
h(u)du = λ
A
(x). (19)
Denote a = 1 + λ
A
(x
A00
)(2 + λ
A
(x
A01
)).
Proposition 5.4. In the symmetric case,
π
00
=
1
a
, π
01
= π
01
=
λ
A
(x
A00
)
a
,
and,
π
11
=
λ
A
(x
A00
)λ
A
(x
A01
)
a
.
The proof follows from Lemma 5.3, Assumptions
A1-A3 and Properties P1-P4 above.
Proposition 5.5. In the symmetric case,
S(
−→
x ) =
2c
t
a
Z
x
A00
0
(v − y)h(y)dy + λ
A
(x
A00
Z
x
A01
0
(v − y)h(y)dy
(20)
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
138

Proof. By Proposition 5.4, the assumptions and prop-
erties, we obtain by (9) that:
S(
−→
x ) =
1
a
Z
x
A00
0
c
t
(v
A
− y)h(y)dy+
λ
A
(x
A00
)
a
Z
x
A01
0
c
t
(v
A
− y)h(y)dy+
+
1
a
Z
M
M−x
A00
c
t
(y − M + v
A
)h(y)dy+
λ
A
(x
A00
)
a
Z
M
M−x
A01
c
t
(y − M + v
A
)h(y)dy.
(21)
Now, by A1 and by substituting t = M − y in
R
M
M−x
A00
c
t
(y − M + v
A
)h(y)dy, we obtain
Z
M
M−x
A00
c
t
(y−M +v
A
)h(y)dy =
Z
x
A00
0
c
t
(v
A
−t)h(t)dt.
(22)
Similarly,
Z
M
M−x
A01
c
t
(y−M +v
A
)h(y)dy =
Z
x
A01
0
c
t
(v
A
−t)h(t)dt.
(23)
Substituting (22) and (23) in (21) gives
S(
−→
x ) =
1
a
Z
x
A00
0
c
t
(v
A
− y)h(y)dy+
λ
A
(x
A00
)
a
Z
x
A01
0
c
t
(v
A
− y)h(y)dy+
1
a
Z
x
A00
0
c
t
(v
A
− y)h(y)dy+
λ
A
(x
A00
)
a
Z
x
A01
0
c
t
(v
A
− y)h(y)dy =
2c
t
a
Z
x
A00
0
(v
A
− y)h(y)dy + λ
A
(x
A00
)
Z
x
A01
0
(v
A
− y)h(y)dy
.
(24)
As Propositions 5.4 and 5.5 show, because of the
symmetry, S(
−→
x ) can be presented as a function of the
parameters of server A only, namely; x
A00
and x
A01
.
The values of x
B00
and x
B10
are then derived according
to properies P1-P4 above. Hence in this section we
abbreviate the notations so that
v = v
A
, x
00
= x
A00
, x
01
= x
A01
,
λ
00
= λ
A
(x
A00
), λ
01
= λ
A
(x
A01
).
In the new notations, we obtain from Proposi-
tion 5.5:
S(x
00
,x
01
) =
2c
t
1
a
Z
x
00
0
(v − y)h(y)dy +
λ
00
a
Z
x
01
0
(v − y)h(y)dy
.
(25)
We wish to find (x
∗
00
,x
∗
01
), that maximizes
S(x
00
,x
01
). (x
00
,x
01
)
∗
must satisfy that both deriva-
tives of S, (with respect to x
00
, and x
01
) equal zero.
Recall that x
∗
A
is the socially optimal strategy in the
case of a single server A (see Section 2). We wish to
prove first that (x
∗
A
,x
∗
A
) is the unique maximum point
of S(x
00
,x
01
).
Proposition 5.6. Given x
00
> 0, the ˜x
01
= ˜x
01
(x
00
),
that satisfies
∂
∂x
01
S(x
00
,x
01
) = 0,
is the unique local maximum point of S(x
00
,•). If
x
00
̸= x
∗
A
, then ˜x
01
(x
00
) > x
∗
A
.
Proof. Note that the derivatives of π
00
and π
01
with
respect to x
01
are,
π
′
00
= −
λ
00
h(x
01
)
(1 + λ
00
(2 + l
01
))
2
= −
λ
00
h(x
01
)
a
2
, (26)
and,
π
′
01
= −
λ
2
00
h(x
01
)
(1 + λ
00
(2 + λ
01
))
2
= −
λ
2
00
h(x
01
)
a
2
. (27)
It follows from (25), (26) and (27) that
∂
∂x
01
S(x
00
,x
01
) =
λ
00
h(x
01
)
a
2
{−
Z
x
00
0
(v −y)h(y)dy + (v − x
01
)(1 +λ
00
(2 +λ
01
))−
λ
00
Z
x
01
0
(v − y)h(y)dy} (28)
Thus, for a given x
00
, the ˜x
01
= ˜x
01
(x
00
) for which
∂
∂x
01
S(x
00
,x
01
) = 0, solves:
−
Z
x
00
0
(v−y)h(y)dy+(v−x
01
)(1+λ
00
(2+λ
01
))−
λ
00
Z
x
01
0
(v − y)h(y)dy = 0, (29)
where λ
01
=
R
x
01
0
h(y)dy.
Now, if we differentiate the left hand side of (29)
with respect to x
01
, we arrive at
− λ
00
(v − x
01
)h(x
01
) − (1 + λ
00
(2 + λ
01
))+
λ
00
(v − x
01
)h(x
01
) = −a < 0. (30)
Hence the left hand side of (29) is decreasing in
x
01
. It follows that,
∂
∂x
01
S(x
00
,x
01
) > 0, ∀x
01
< ˜x
01
,
∂
∂x
01
S(x
00
,x
01
) = 0, for x
01
= ˜x
01
,
Multi-Server Queue, with Heterogeneous Service Valuations Induced by Travel Costs
139

and
∂
∂x
01
S(x
00
,x
01
) < 0, ∀x
01
> ˜x
01
.
Thus, ˜x
01
is indeed the unique local maximum of
S(x
00
,•).
Denote λ
∗
A
= λ
A
(x
∗
A
) =
R
x
∗
A
0
h(y)dy. For any given
x
00
, (29) presents the condition for
∂
∂x
01
S(x
00
,x
01
) =
0. Subtituting x
01
= x
∗
A
in the left hand side of (29)
gives
−
Z
x
00
0
(v − y)h(y)dy−
λ
00
Z
x
∗
A
0
(v − y)h(y)dy + (v − x
∗
A
)(1 + λ
00
(2 + λ
∗
A
))
= −
Z
x
00
0
(v − x
∗
A
+ x
∗
A
− y)h(y)dy−
λ
00
Z
x
∗
A
0
(v − y)h(y)dy + (v − x
∗
A
)(1 + λ
00
(2 + λ
∗
A
)) =
− (v − x
∗
A
)λ
00
−
Z
x
00
0
(x
∗
A
− y)h(y)dy−
λ
00
Z
x
∗
A
0
(v − y)h(y)dy+
(v − x
∗
A
)(1 + 2λ
00
+ λ
00
λ
∗
A
).
(31)
By (12),
Z
x
∗
A
0
(v −y)h(y)dy = (v −x
∗
A
)λ
∗
A
+
Z
x
∗
A
0
(x
∗
A
−y)h(y)dy.
Substituting this in (31) gives
− (v −x
∗
A
)λ
00
−
Z
x
00
0
(x
∗
A
− y)h(y)dy−
λ
00
(v − x
∗
A
)λ
∗
A
+
Z
x
∗
A
0
(x
∗
A
− y)h(y)dy
+ (v −x
∗
A
)(1 + 2λ
00
+ λ
00
λ
∗
A
) = (v − x
∗
A
)(−λ
00
− λ
00
λ
∗
A
+
1 + 2λ
00
+ λ
00
λ
∗
A
) + (−λ
00
− 1 +1)
Z
x
∗
A
0
(x
∗
A
− y)h(y)dy−
Z
x
00
0
(x
∗
A
− y)h(y)dy =
(32)
= (λ
00
+ 1)
v −
x
∗
A
+
Z
x
∗
A
0
(x
∗
A
− y)h(y)dy
+
Z
x
∗
A
x
00
(x
∗
A
− y)h(y)dy.
Note that by (10), the expression in the square brakets
above equals 0, hence we get
Z
x
∗
A
x
00
(x
∗
A
− y)h(y)dy, (33)
which is positive for all x
00
̸= x
∗
A
, as now explained:
For x
∗
A
≥ x
00
this is obvious. For x
∗
A
< x
00
, the left
hand side of (33) equals
−
Z
x
00
x
∗
A
(x
∗
A
− y)h(y)dy =
Z
x
00
x
∗
A
(y − x
∗
A
)h(y)dy > 0.
So we proved that for x
00
̸= x
∗
A
, the left hand side
of (29), is positive for x
01
= x
∗
A
. Now, in comparis-
sion to that, if we substitute x
01
= ˜x
01
(x
00
) in the left
hand side of (29), then by definition of ˜x
01
(x
00
), this
equals 0. Earlier (see (30)) we showed that the left
hand side of (29) is decreasing in x
01
. Hence it fol-
lows that ˜x
01
(x
00
) > x
∗
A
.
Similarly,
Proposition 5.7. Given x
01
> 0, the ˜x
00
= ˜x
00
(x
01
),
that satisfies
∂
∂x
00
S(x
00
,x
01
) = 0,
is unique and it is the local maximum point of
S(•,x
01
). If x
01
̸= x
∗
A
, then ˜x
00
(x
01
) < x
∗
A
.
The proof of Proposition 5.7 is very similar to
the proof of Proposition 5.6. and involves proving
that for a given x
01
, the ˜x
00
= ˜x
00
(x
01
) for which
∂
∂x
00
S(x
00
,x
01
) = 0, solves:
− (2 + λ
01
)
Z
x
00
0
(v − y)h(y)dy+
Z
x
01
0
(v − y)h(y)dy + (v − x
00
)a = 0. (34)
Theorem 5.8. The point (x
∗
A
,x
∗
A
) is the unique global
maximum point of S(x
00
,x
01
), and it satisfies that
S(x
∗
A
,x
∗
A
) = 2c
t
(v − x
∗
A
).
Proof. Substituting x
00
= x
01
= x
∗
A
in (20) and uti-
lizing Lemma 5.1 indeed gives 2c
t
(v − x
∗
A
). In order
to prove that (x
∗
A
,x
∗
A
) is the unique global maximum
point of S(x
00
,x
01
), we first, prove that (x
∗
A
,x
∗
A
) is
the only point in which both derivatives of S(x
00
,x
01
),
(with respect to x
00
and with respect to x
01
), equal 0.
A point in which both derivatives equal 0, must satisfy
both (29) and (57).
Recall that, Equation (29) is:
−
Z
x
00
0
(v−y)h(y)dy+(v−x
01
)(1+λ
00
(2+λ
01
))−
λ
00
Z
x
01
0
(v − y)h(y)dy = 0, (35)
and Equation (57) is:
− (2 + λ
01
)
Z
x
00
0
(v − y)h(y)dy+
Z
x
01
0
(v − y)h(y)dy + (v − x
00
)a = 0. (36)
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
140

From (29) we have:
Z
x
00
0
(v − y)h(y)dy = (v − x
01
)a − λ
00
Z
x
01
0
(v − y)h(y)dy.
Subtituting this in (57) gives:
−(2+λ
01
)
(v − x
01
)a − λ
00
Z
x
01
0
(v − y)h(y)dy
+
Z
x
01
0
(v − y)h(y)dy + (v − x
00
)a = 0. (37)
This implies that:
a
v − x
00
− (2 + λ
01
)(v − x
01
)
+
1 + λ
00
(2 + λ
01
)
Z
x
01
0
(v − y)h(y)dy = 0, (38)
which is equivalent to:
a
v − x
00
− (2 + λ
01
)(v − x
01
)
+
a
Z
x
01
0
(v − y)h(y)dy = 0. (39)
From this we arrive at:
x
01
− x
00
+
h
Z
x
01
0
(v − y)h(y)dy − (1 + λ
01
)(v − x
01
)
i
= 0. (40)
We first show that x
00
must equal x
∗
A
: If on the con-
trary, x
00
̸= x
∗
A
, then we proved in Proposition 5.6 that
˜x
01
(x
00
) > x
∗
A
. But in that case, by Lemma 5.1, the ex-
pression in the square brackets above is positive. Ad-
ditionally, x
01
− x
00
> 0, (since, x
00
≤ M/2 < x
∗
A
<
˜x
01
(x
00
)). Thus the left hand side of (40) is strictly
positive and thus cannot satisfy (40). Hence,
x
00
= x
∗
A
. (41)
Now, if ˜x
01
̸= x
∗
A
, then by Proposition 5.7, x
00
< x
∗
A
,
which contradicts (41), thus,
˜x
01
(x
∗
A
) = x
∗
A
. (42)
Hence, we proved that (x
∗
A
,x
∗
A
) is the only point
in which both derivatives of S equal 0. To prove that
(x
∗
A
,x
∗
A
) is also the unique global maximum point, we
need to check the value of S at the borders, namely
at the boundaries of the rectangular [0,M/2] ×[0, M] :
If x
00
= 0, then λ
00
= 0. Hence by Proposition 5.4,
π
01
= π
01
=
λ
00
a
= 0.
Hence from the the balance equation for state
(1,1) (see equation 3 in the balance equation system
appearing in (8)), we get:
0 = [µ
A
+ µ
B
]π
11
,
which implies that π
11
= 0, hence π
00
= 1. Thus the
service-system is always empty and thus S(0,x
01
) =
0, which is smaller than S(x
∗
A
,x
∗
A
) = 2c
t
(v − x
∗
A
).
If x
01
= 0, then (25) gives
S(x
00
,0) = 2c
t
1
1 + 2λ
00
Z
x
00
0
(v − y)h(y)dy
,
which implies:
S(x
00
,0) < 2c
t
1
1 + λ
00
Z
x
00
0
(v − y)h(y)dy
. (43)
Recall that in M/G/1/1, (see Section 2), the prob-
ability that the system is empty when the service-
threshold is x
00
, (and µ = 1), is
π
0
(x
00
) =
1
1 + λ
00
.
In M/G/1/1, we denoted the social welfare function,
when the service-threshold is x, as S
1
(x). By (1):
S
1
(x) = c
t
Z
x
0
(v − y)h(y)π
0
(x)dy. (44)
Thus it follows from (43) that:
S(x
00
,0) < 2c
t
Z
x
00
0
(v − y)h(y)π
0
(x
00
)dy =
2S
1
(x
00
) < 2S
1
(x
∗
A
) = 2c
t
Z
x
∗
A
0
(v − y)h(y)π
0
(x
∗
A
)dy
= 2c
t
Z
x
∗
A
0
(v − y)h(y)
1
1 + λ
∗
A
dy =
2c
t
1 + λ
∗
A
Z
x
∗
A
0
(v − y)h(y)dy. (45)
By Lemma 5.1, the right hand side of (45) equals
2c
t
(v − x
∗
A
), which by Theorem 5.8 equals S(x
∗
A
,x
∗
A
).
Hence,
S(x
00
,0) < S(x
∗
A
,x
∗
A
).
For the cases of x
00
= M/2, or x
01
= M, we can
use the symmetry of the model with regards to the
servers, and thus, for example, x
00
= M, implies that
for server B, x
B00
= M, as well (see (3)) which yields
λ
B00
= 0, and from that point to continue like in the
case where λ
00
= 0.
Corollary 5.9. Given x
00
,
S(x
00
, ˜x
01
(x
00
)) = 2c
t
(v − ˜x
01
(x
00
)).
Proof. By (25) we have:
S(x
00
, ˜x
01
(x
00
)) =
2c
t
a
Z
x
00
0
(v − y)h(y)dy + λ
00
Z
˜x
01
(x
00
)
0
(v − y)h(y)dy
.
(46)
Multi-Server Queue, with Heterogeneous Service Valuations Induced by Travel Costs
141

Additionally, ˜x
01
(x
00
) satisfies (29), implying
that:
λ
00
Z
˜x
01
(x
00
)
0
(v − y)h(y)dy =
−
Z
x
00
0
(v − y)h(y)dy + a
v − ˜x
01
(x
00
)
. (47)
Subtituting (47) in (46), gives:
S(x
00
, ˜x
01
(x
00
)) =
2c
t
a
h
Z
x
00
0
(v − y)h(y)dy−
Z
x
00
0
(v − y)h(y)dy + a(v − ˜x
01
(x
00
))
i
= 2c
t
(v − ˜x
01
(x
00
)). (48)
Recall that Case A is defined by x
∗
A
≤ x
∗
B
, and
Case B is defined by x
∗
A
> x
∗
B
. Theorem 5.10 ahead
claims that under social optimality, in Case A, each
server serves consumers that are x
∗
A
or less, away
from the servic point, and that in Case B: When both
servers are idle, then each server serves consumers
that are M/2 or less, away from the service point.
In case only one server is available, then she serves
consumers with distance that exceeds x
∗
A
, where the
service- threshold is determined according to (49)
ahead.
Formally, going back to our earlier notations; re-
call that x
00
was an abbreviation for x
A00
the service-
threshold of server A when both servers are idle, and
x
B00
was the service-threshold of server B when both
servers are idle. Similarly, x
A01
( x
B10
) was the service
threshold of A, (B) when only he was available.
Theorem 5.10. In the symmetric model, the strat-
egy
−→
x
∗
= (x
∗
A00
,x
∗
A01
,x
∗
B00
,x
∗
B10
) that maximizes so-
cial welfare S(
−→
x ), is the following
• Case A, namely when x
∗
A
≤ x
∗
B
, then:
(x
∗
A00
,x
∗
A01
,x
∗
B00
,x
∗
B10
) = (x
∗
A
,x
∗
A
,M − x
∗
A
,M − x
∗
A
),
and S = 2c
t
(v − x
∗
A
).
• Case B, namely when x
∗
A
> x
∗
B
,
1. If both servers are available then (x
∗
A00
,x
∗
B00
) =
(M/2,M/2), and S = 2c
t
(v − M/2).
2. If only server A is available then, x
∗
A01
=
˜x
01
(M/2), and if only server B is available
then, x
∗
B10
= M − ˜x
01
(M/2). In both cases, S =
2c
t
(v − ˜x
01
(M/2)), where ˜x
01
(M/2), is the
unique solution for:
Z
M
2
0
(v − y)h(y)dy −
(v − x
01
)
1 + λ
A
(M/2)(2 + λ
01
)
+ λ
A
(M/2)
Z
x
01
0
(v − y)h(y)dy = 0. (49)
Proof. Because of the symmetry between servers A
and B, we have by properties P3 and P4, that x
∗
B10
=
M − x
∗
A01
, and x
∗
B00
= M − x
∗
A00
, hence we only need
to prove the theorem for server A. Recall that in the
symmetric case x
A00
must satisfy
x
∗
A00
≤
M
2
,
(see (18)). Now, by Theorem 5.8, (x
∗
00
,x
∗
01
) = (x
∗
A
,x
∗
A
)
is the unique global maximum of the social welfare
function S, hence whenever this solution is possible
(i.e., x
∗
A
≤ M/2), then this will be the strategy of
server A. This proves the statement of the theorem
regarding case A, (since in that case, x
∗
A
≤ M/2.).
In Case B, x
∗
A
> M/2, hence x
∗
A
is not an option
for x
∗
00
which must satisfy x
∗
A00
≤
M
2
.
Recall that (29) defines ˜x
01
(x
00
) for a given x
00
,
where (29) is
−
Z
x
00
0
(v − y)h(y)dy + (v − x
01
)(1 + λ
00
(2 + λ
01
))
− λ
00
Z
x
01
0
(v − y)h(y)dy = 0. (50)
Define the left hand side of (29), as a function
f (x
00
,x
01
). By definition of ˜x
01
(x
00
),
f (x
00
, ˜x
01
(x
00
)) = 0. (51)
We showed, (see (30)), that f (x
00
,x
01
) is decreasing
in x
01
.
Below we show that f (x
00
,x
01
) is also decreasing
in x
00
for all x
00
̸= x
∗
A
. This implies that ˜x
01
(x
00
) is
decreasing as a function of x
00
, since if we increase
x
00
to x
00
+ ε then since f (x
00
,x
01
) is decreasing in
x
00
, then f (x
00
+ ε, ˜x
01
(x
00
)) < f (x
00
, ˜x
01
(x
00
)) = 0,
and since f is also decreasing in x
01
, then f (x
00
+
ε, ˜x
01
(x
00
+ ε)) = 0 implies that ˜x
01
(x
00
+ ε) <
˜x
01
(x
00
).
To see that indeed f (x
00
,x
01
) is decreasing in x
00
,
for all x
00
̸= x
∗
A
, note that the derivative of f with
respect to x
00
, is:
− (v − x
00
) + (v − x
01
)(2 + λ
01
)h(x
00
)
− h(x
00
)
Z
x
01
0
(v − y)h(y)dy, (52)
which equals:
h(x
00
)
h
(1 + λ
01
)(v − x
01
) −
Z
x
01
0
(v − y)h(y)dy
i
−
x
01
h(x
00
). (53)
By Lemma 5.1, the expression in the square brackets
is negative, (since by Proposition 5.6, if x
00
̸= x
∗
A
, then
˜x
01
(x
00
) > x
∗
A
).
Now, by Corollary 5.9, S(x
00
, ˜x
01
(x
00
)) = 2c
t
(v −
˜x
01
(x
00
)), which is maximized for the smallest
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
142

˜x
01
(x
00
). Since we showed that ˜x
01
(x
00
) is decreas-
ing as a function of x
00
, then 2c
t
(v − ˜x
01
(x
00
)) is
maximized for the largest x
00
possible, which is M/2,
(see (18)). Thus x
00
= M/2 and x
01
= ˜x
01
(M/2).
The value of S in case A and case B1 in Theo-
rem 5.10, follow from (25). The value of S in case B2
follow from Corollary 5.9.
6 CONCLUSIONS
In this study we establish that if the model is sym-
metric with regards to the servers, then under social
optimality, when the service points are distant from
each other, each server behaves as he would if he was
the sole server. But when the service points are within
close proximity, then when only one server is idle, so-
cial optimality dictates that the available server also
caters to distant customers, a behavior it would not
exhibit if it were the sole server in the service sys-
tem (i.e., in M/M/1/1). These results apply when
both servers are informed about each other’s status
(idle/busy). While sharing information about server
status is beneficial, there are situations where it is not
feasible. Take, for instance, two ride-sharing drivers
operating in the same area without real-time knowl-
edge of each other’s current ride status. In this sce-
nario, each driver independently accepts ride requests
without knowing whether the other is currently occu-
pied. This lack of information may lead to subop-
timal resource allocation as both drivers might end
up serving nearby locations simultaneously, poten-
tially reducing overall efficiency. For future research,
comparing between the two models; the model where
servers are informed about each other’s status to the
model where servers are ignorant of each other’s sta-
tus would be intriguing. How significant is this infor-
mation? If there is a substantial difference between
the outcomes, it may warrant consideration for inter-
vention by authorities.
REFERENCES
C. D’aspremont, J. Jaskold Gabszewicz, J.F. Thisse, (1979)
”On Hotelling’s ’Stability in Competition’,” Econo-
metrica 47, 1145-1150.
S. Deo, and I. Gurvich, (2011) ”Centralized vs. decentral-
ized ambulance diversion: a network perspective”,
Management Science 57(7), 1300-1319.
G. Dobson, E. Stavrulaki, (2007) ”Simultaneous price, loca-
tion, and capacity decisions on a line of time-sensitive
customers,” Naval Research Logistics 54, 1-10.
N. Economides, (1986), ”Minimal and maximal product
differentiation in Hotelling’s duopoly,” Economics
Letters 21, 67-71.
G. Gilboa-Freedman, R. Hassin, Y. Kerner, (2014) ”The
price of anarchy in the Markovian Single server
Queue,” IEEE Transactions on Automatic Control 59,
455-459.
Gallay, Olivier and Max-Olivier Hongler, (2008) ”Market
sharing dynamics between two service providers,” Eu-
ropean Journal of Operational Research 190, 241-254.
R. Hassin, M. Haviv, (2003) ”To Queue or Not to Queue:
Equilibrium Behavior in Queuing Systems,” KluWer
International Series.
R. Hassin, I. Nowik, Y. Shaki, (2018) ”On the price of
anarchy in a single server queue with heterogeneous
service valuations induced by travel costs,” European
Journal of Operational Research (EJOR) 265, 580-
588.
R. Hassin, (2016) ”Rational Queuing,” CRC press.
H. Hotelling, (1929) ”Stability in competition,” The Eco-
nomic Journal, 39, 41-57.
A.M Kwasnica, and S. Euthemia, (2008) ”Competitive lo-
cation and capacity decisions for firms serving time-
sensitive customers,” Naval Research Logistics 55(7),
704-721.
E. Koutsoupias and C. Papadimitriou, (1999) ”Worst-Case
Equilibria,” Computer Science Review 3, 65-69.
C. Larsen, (1998) ”Investigating sensitivity and the impact
of information on pricing decisions in an M/M/1/1
queueing model,” International Journal of Production
Economics 56-57, 365-377.
B.L. Miller, and A.G. Buckman, (1987) ”Cost allocation
and opportunity costs,” Management Science 33, 626-
639.
M. Mavronicolas M, and P. Spirakis, (2001) ”The price
of selfish routing,” Proceedings of the Thirty-Third
Annual ACM Symposium on Theory of Computing
(STOC).
P. Naor, (1969) ”The regulation of queue size by levying
tolls,” Econometrica 37, 15-24.
M.S. Pangburn, E. Stavrulaki, (2008) ”Capacity and price
setting for dispersed, time-sensitive customer seg-
ments,” European Journal of Operational Research
184, 1100-1121.
S. Ray, E.M. Jewkes, (2004) ”Customer lead time manage-
ment when both demand and price are lead time sensi-
tive,” European Journal of Operational Research 153,
769-781.
Multi-Server Queue, with Heterogeneous Service Valuations Induced by Travel Costs
143

APPENDIX
Proof of Proposition 5.7
Proof. Note that the derivatives of π
00
and π
01
with
respect to x
00
are,
π
′
00
=
1
a
′
=
1
1 + λ
00
(2 + λ
01
)
′
= −
(2 + λ
01
)h(x
00
)
(1 + λ
00
(2 + λ
01
))
2
= −
(2 + λ
01
)h(x
00
)
a
2
,
(54)
and,
π
′
01
=
λ
00
a
′
=
λ
00
1 + λ
00
(2 + λ
01
)
′
=
h(x
00
)(1 + λ
00
(2 + λ
01
)) − λ
00
h(x
00
)(2 + λ
01
)
(1 + λ
00
(2 + λ
01
))
2
=
h(x
00
)(1 + 2λ
00
+ λ
00
λ
01
− 2λ
00
− λ
00
λ
01
)
(1 + λ
00
(2 + λ
01
))
2
=
h(x
00
)
(1 + λ
00
(2 + λ
01
))
2
=
h(x
00
)
a
2
.
(55)
It follows from (54), (55) and (25), that
∂
∂x
00
S(x
00
,x
01
) = 2c
t
h(x
00
)
a
2
[−(2 + λ
01
)
Z
x
00
0
(v − y)h(y)dy + (v − x
00
)a+
Z
x
01
0
(v − y)h(y)dy]. (56)
Thus, for a given x
01
, the ˜x
00
= ˜x
00
(x
01
) for which
∂
∂x
00
S(x
00
,x
01
) = 0,
solves:
− (2 + λ
01
)
Z
x
00
0
(v − y)h(y)dy+
Z
x
01
0
(v − y)h(y)dy + (v − x
00
)a = 0, (57)
where λ
00
=
R
x
00
0
h(y)dy, and a = 1 + λ
00
(2 + λ
01
).
Now, if we differentiate the left hand side of (57)
with respect to x
00
, we arrive at
− (2 + λ
01
)(v − x
00
)h(x
00
) − (1 + λ
00
(2 + λ
01
))+
(2 + λ
01
)(v − x
00
)h(x
00
) = −a < 0. (58)
It follows that,
∂
∂x
00
S(x
00
,x
01
) > 0, ∀x
00
< x
∗
00
,
∂
∂x
00
S(x
00
,x
01
) = 0, for x
00
= x
∗
00
,
and
∂
∂x
00
S(x
00
,x
01
) < 0, ∀x
00
> x
∗
00
.
We now prove that if x
01
̸= x
∗
A
, then x
∗
00
(x
01
) <
x
∗
A
.
Recall that λ
∗
A
= λ
A
(x
∗
A
) =
R
x
∗
A
0
h(y)dy. For
any given x
01
, (57) presents the condition for
∂
∂x
00
S(x
00
,x
01
) = 0. Subtituting x
00
= x
∗
A
in the left
hand side of (57) gives
− (2 + λ
01
)
Z
x
∗
A
0
(v − y)h(y)dy+
Z
x
01
0
(v − y)h(y)dy + (v − x
∗
A
)(1 + λ
∗
A
(2 + λ
01
)).
(59)
By Lemma 5.1:
− (2 +λ
01
)
Z
x
∗
A
0
(v − y)h(y)dy +
Z
x
01
0
(v − y)h(y)dy+
(v − x
∗
A
)(1 + λ
∗
A
(2 + λ
01
)) =
− (2 +λ
01
)
(v − x
∗
A
)λ
∗
A
+
Z
x
∗
A
0
(x
∗
A
− y)h(y)dy
+
Z
x
01
0
(v − x
∗
A
+ x
∗
A
− y)h(y)dy + (v − x
∗
A
)(1 + λ
∗
A
(2 + λ
01
))
= −(2 + λ
01
)
(v − x
∗
A
)λ
∗
A
+
Z
x
∗
A
0
(x
∗
A
− y)h(y)dy
+
(v − x
∗
A
)λ
01
+
Z
x
01
0
(x
∗
A
− y)h(y)dy+
(v − x
∗
A
)(1 + λ
∗
A
(2 + λ
01
)) =
(v − x
∗
A
)(−2λ
∗
A
− λ
01
λ
∗
A
+ λ
01
+ 1 +2λ
∗
A
+ λ
01
λ
∗
A
)
− (1 +λ
01
+ 1)
Z
x
∗
A
0
(x
∗
A
− y)h(y)dy+
Z
x
01
0
(x
∗
A
− y)h(y)dy =
(1 + λ
01
)
v −
x
∗
A
+
Z
x
∗
A
0
(x
∗
A
− y)h(y)dy
−
Z
x
∗
A
x
01
(x
∗
A
− y)h(y)dy.
(60)
Note that by (10), the expression in the square
brakets above equals 0, hence we get that
−
Z
x
∗
A
x
01
(x
∗
A
− y)h(y)dy,
which is negative for all x
00
̸= x
∗
A
.
Now, in comparission to that, if we substitute
x
00
= ˜x
00
(x
01
) in the left hand side of(57), then by
definition of ˜x
00
(x
01
), this equals 0. Earlier (see (58))
we showed that the left hand side of (57) is decreasing
in x
00
. Hence it follows that ˜x
00
(x
01
) < x
∗
A
.
ICORES 2024 - 13th International Conference on Operations Research and Enterprise Systems
144

Proof of Lemma 5.2
Proof. Note that,
Z
M
x
(y − v)h(y)dy = (x − v)λ
B
(x) + x−
h
x −
Z
M
x
(y − x)h(y)dy
i
. (61)
It follows from (61) and (11) that for x = x
∗
B
,
Z
M
x
∗
B
(y − v)h(y)dy = (x
∗
B
− v)λ
∗
B
+ x
∗
B
− v =
(x
∗
B
− v)(λ
∗
B
+ 1), (62)
proving the second statement of the lemma. Note that
x −
R
M
x
(y− x)h(y)dy, appearing in the square brackets
at the right hand side of (61) is increasing in x, hence
it follows from (62) that:
• If x < x
∗
B
, then
R
M
x
(y−v)h(y)dy > (x−v)λ
B
(x)+
x − v = (λ
B
(x) + 1)(x − v),
• If x > x
∗
B
, then
R
M
x
(y−v)h(y)dy < (x−v)λ
B
(x)+
x − v = (λ
B
(x) + 1)(x − v),
proving the first and last statements of the lemma.
Multi-Server Queue, with Heterogeneous Service Valuations Induced by Travel Costs
145
