
Curriculum for Crowd Counting: Is It Worthy?
Muhammad Asif Khan
1 a
, Hamid Menouar
1 b
and Ridha Hamila
2 c
1
Qatar Mobility Innovations Center, Qatar University, Doha, Qatar
2
Department of Electrical Engineering, Qatar University, Doha, Qatar
Keywords:
Crowd Counting, Curriculum Learning, CNN, Density Estimation.
Abstract:
Recent advances in deep learning techniques have achieved remarkable performance in several computer vi-
sion problems. A notably intuitive technique called Curriculum Learning (CL) has been introduced recently
for training deep learning models. Surprisingly, curriculum learning achieves significantly improved results
in some tasks but marginal or no improvement in others. Hence, there is still a debate about its adoption as
a standard method to train supervised learning models. In this work, we investigate the impact of curriculum
learning in crowd counting using the density estimation method. We performed detailed investigations by con-
ducting 112 experiments using six different CL settings using eight different crowd models. Our experiments
show that curriculum learning improves the model learning performance and shortens the convergence time.
1 INTRODUCTION
Crowd counting is an interesting problem in com-
puter vision research (Khan et al., 2022; Fan et al.,
2022; Gouiaa et al., 2021). Though several methods
(Li et al., 2008; Topkaya et al., 2014; Chen et al.,
2012; Chan and Vasconcelos, 2009) have been pro-
posed earlier to estimate crowd in an image, the de-
facto state-of-the-art approach for crowd counting is
using density estimation. Density estimation employs
a deep learning model such as a convolution neural
network (CNN) to estimate the crowd density in an
image. The ground truths to train the model are den-
sity maps of crowd images. A density map is gener-
ated from the dot annotation map where each dot (rep-
resenting the head position of a person) is convolved
with a Gaussian function.
Over the years, several models have been pro-
posed to improve the accuracy performance over
benchmark datasets. Notably, CrowdCNN was the
first CNN-based model proposed in (Zhang et al.,
2015). CrowdCNN is a single-column 6-layer CNN
network using density map prediction. Due to the sin-
gle column, CrowdCNN does not capture the scale
variations present in head sizes in crowd images.
CrowdNet (Boominathan et al., 2016) and MCNN
a
https://orcid.org/0000-0003-2925-8841
b
https://orcid.org/0000-0002-4854-909X
c
https://orcid.org/0000-0002-6920-7371
(Zhang et al., 2016) propose multi-column architec-
tures to cope with the scale variations. The CrowdNet
model uses a shallow and a deep network to predict
different crowd densities. The MCNN model used
three columns of CNN layers with different sizes of
convolution kernels in each layer to efficiently cap-
ture the scale variations. Though, these multi-column
networks achieve better accuracy, their performance
is poor on highly congested scenes mainly due to two
reasons. First, the model’s ability to capture scale
variations is limited by the number of columns. Sec-
ond, these shallow models become quickly saturated
due to the small number of neurons. To solve the scale
variation problem, improved model architectures such
as encoder-decoder e.g., TEDnet (Jiang et al., 2019),
SASNet (Song et al., 2021), and pyramid structure us-
ing multi-scale modules e.g., MSCNN (Zeng et al.,
2017), SANet (Cao et al., 2018) are proposed. For
crowd estimation in highly congested scenes, mod-
els using transfer learning from pre-trained models
such as VGG-16 (Simonyan and Zisserman, 2015),
ResNet (He et al., 2016), MobileNet (Sandler et al.,
2018), and Inception (Szegedy et al., 2015) achieved
best results. Few notable models using transfer learn-
ing include CSRNet (Li et al., 2018), C-CNN (Shi
et al., 2020), BL (Ma et al., 2019) (VGG), Mo-
bileCount (Gao et al., 2019) (MobileNet), MMCNN
(Peng et al., 2020), MFCC (Gu and Lian, 2022)
(ResNet), SGANet (Wang and Breckon, 2022) (In-
ception) etc.
Khan, M., Menouar, H. and Hamila, R.
Curriculum for Crowd Counting: Is It Worthy?.
DOI: 10.5220/0012414700003660
Paper published under CC license (CC BY-NC-ND 4.0)
In Proceedings of the 19th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2024) - Volume 3: VISAPP, pages
583-590
ISBN: 978-989-758-679-8; ISSN: 2184-4321
Proceedings Copyright © 2024 by SCITEPRESS – Science and Technology Publications, Lda.
583

Recently, Curriculum Learning (CL) has gained
significant attention as an alternative method to im-
prove performance in various deep-learning tasks.
Curriculum learning refers to the set of techniques to
train deep learning models by imitating human cur-
ricula. In a CL strategy, the training samples are or-
ganized in a specific order (typically by increasing or
decreasing difficulty) before feeding to the model. CL
was first formalized in (Bengio et al., 2009) inspired
by the fact that humans learn better when the tasks
are presented in a meaningful order i.e., typically in
the order of increasing complexity (or difficulty). CL
potentially brings two benefits: (i) faster convergence
and (ii) improved accuracy.
CL has been applied in several supervised learning
applications including object localization (Ionescu
et al., 2016; Shi and Ferrari, 2016; Tang et al., 2018),
object detection (Chen and Gupta, 2015; Li et al.,
2017; Sangineto et al., 2019) and machine translation
(Kocmi and Bojar, 2017; Platanios et al., 2019; Wang
et al., 2019). CL has also been successfully applied
in reinforcement learning (Narvekar et al., 2020). Al-
though CL applied in several problems achieved im-
proved training, faster convergence, and performance
gains; authors in (Wu et al., 2021) show CL could not
benefit the accuracy performance of image classifica-
tion on CIFAR10 dataset (Krizhevsky, 2009). Some
recent works also applied CL in crowd density esti-
mation (Khan et al., 2023b).
This paper aims to perform a rigorous evaluation
of CL in yet another important task in computer vi-
sion i.e., crowd counting. Crowd counting employs
density estimation using pixel-wise regression from
crowd images. Recently, very few works have ap-
plied CL in crowd density estimation reporting poten-
tial benefits in some scenarios. As the results reported
in these works are only incremental, this paper aims
to extensively investigate the potential of CL in crowd
density estimation. The contribution of this paper is
as follows:
• We conducted ∼ 112 experiments using eight
mainstream crowd-counting models and six dif-
ferent CL settings over two benchmark crowd
datasets.
• The models’ performance is evaluated using two
widely used metrics for crowd counting and re-
sults are compared to understand when and to
which extent CL outperforms standard learning.
• Conclusions are drawn for prospective researchers
in the area of crowd counting.
2 BACKGROUND
Curriculum learning (CL) is defined as ”training cri-
teria C over T training steps: C =< Q
1
,...Q
t
,...Q
T
>
such that each criterion Q
t
is a reweighting of the tar-
get training distribution P(z)”:
Q
t
(z) = W
t
(z)P(z) ∀z ∈ training set D (1)
In eq: 1, (i) the entropy of P(z) gradually increases
i.e., H(Q
t
) < H(Q
t+1
), (ii) the weight of any example
increases i.e., W
t
(z) ≤ W
t+1
(z), or (iii) Q
T
(z) = P(z)
(Wang et al., 2022b).
A formal description of the curriculum learning
method is presented in Algorithm 1.
Algorithm 1: Curriculum Learning.
Require: pacing function g, scoring function f , data X
Result: mini-batches [B
1
,B
2
,...B
M
]
1: results = sort X using f
2: for i = 1, · · · M do
3: size ← g(i)
4: X
i
= X[1,...,size]
5: uniformly sample B
i
to results
6: append B
i
to result
7: end for
8: return results
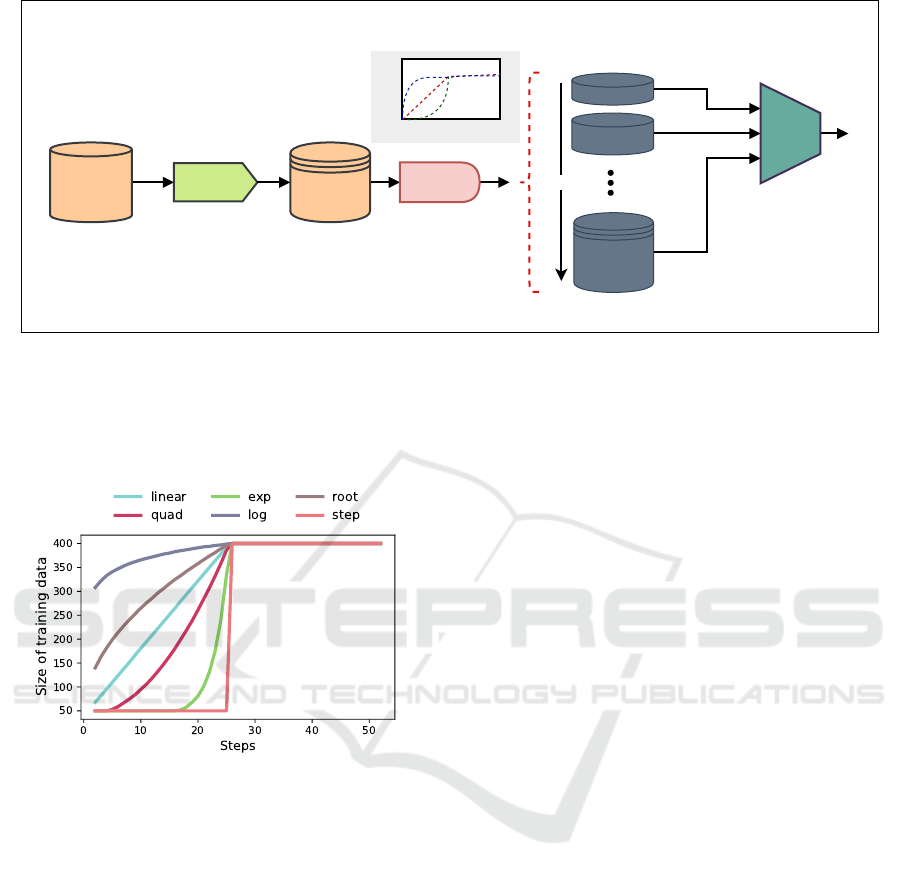
There are two main parts of curriculum learning,
a scoring function, and a pacing function. The scor-
ing function is used to organize the training samples
in a specific meaningful order while the pacing func-
tion samples the amount of data exposed to the model
in each training step. Fig. 1 depicts the curriculum
learning process.
2.1 Scoring Function
A scoring function ( f ) is a function that sorts the
training data in the order of increasing or decreas-
ing difficulty (in curriculum versus anti-curriculum
learning, respectively). For a given scoring function
f : X → R, (x
i
,y
i
) is more difficult than (x
j
,y
j
) if
f (x
,
y
i
) > f (x
j
,y
j
). A scoring function can be defined
in two ways; (i) self-taught, or (ii) transfer-scoring.
In self-taught scoring function, the network is trained
on uniformly-sampled (randomly ordered) batches to
compute the score (difficulty) for each training sam-
ple. In transfer-scoring function, a pre-trained model
is used to compute the score for each training sample.
2.2 Pacing Function
A pacing function g is a function that determines a
subset of training data fed to the model in a particular
iteration. For training data X of size N, g : [M] → [N]
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
584
Scoring
function
Full Dataset
(sorted)
Pacing
function
Minibatches
Full Dataset
(sorted)
Minibatches
Full Dataset
(unsorted)
1
st
iteration
2
nd
iteration
N
th
iteration
Model
curriculum
OR
anti-curriculum
Iterations
training data
Difficulty
Figure 1: Curriculum learning framework.
finds subsets X
1
,X
2
,...X
M
⊂ X. From each X, mini-
batches {B
i
}
M
i=1
are uniformly sampled. Fig. 2 de-
picts six different pacing functions used in curriculum
learning.
Figure 2: Various pacing functions applied to ShanghaiTech
Part B dataset with a total number of samples (N) = 400 and
batch size = 8.
In the more native form of CL, the training ex-
amples are organized in order of increasing difficulty.
However, some works suggest anti-curriculum, in
which the training examples are organized in the or-
der of decreasing difficulty.
3 RELATED WORK
Recently, curriculum learning has been adopted in a
few crowd-counting works. In (Li et al., 2021), au-
thors propose TutorNet to improve density estimation
in crowd counting. A main network that generates
density maps for crowd images is supervised at the
training stage by a TutorNet network. The network
produces a weight map of the same shape as the den-
sity map. Each value in the weight map then rep-
resents the per-pixel learning rate of the model er-
ror. Thus, this weight map is used as a curriculum
to train the main network. TutorNet uses ResNet as
a frontend to extract features. The work also uses
scaling of the density map pixel values. TutorNet
is evaluated over ShanghaiTech (Zhang et al., 2016)
and Fudan-ShanghaiTech dataset (FDST) (Fang et al.,
2019). The results show major improvement using
density map scaling with further improvement using
TutorNet (pixel-level curriculum). The work did not
consider TutorNet alone, hence providing little intu-
ition on the efficacy of CL. The authors in (Wang
et al., 2022a) followed a similar approach to imple-
ment CL in crowd-counting tasks. A weight is as-
signed to each pixel in a crowd image which indi-
cates the per-pixel difficulty. More specifically, a
region-aware density map (RAD) is first generated
through an average pooling operation and then the
Gaussian function is applied to RAD to produce an at-
tention map. In the attention maps, the simple pixels
are assigned higher weights. A modified loss func-
tion is proposed to use the attention maps during the
model training. The learning performance is eval-
uated on ShanghaiTech (Zhang et al., 2016), UCF-
QNRF (Idrees et al., 2018), WorlExpo’10 (Zhang
et al., 2015), and GCC (Qi et al., 2020) datasets.
The computation of pixel-wise curricula can be a
more expensive task as compared to sample-wise cur-
ricula in many works on CL. A recent study (Khan
et al., 2023a) on curriculum learning integrated with
dataset pruning to improve the learning performance
and convergence time supports the efficacy of sample-
wise curriculum learning.
A review of the aforementioned works provides
limited hints on the efficacy of curriculum learning in
crowd-counting tasks. However, whether the perfor-
mance gains in these works are the results of the cur-
Curriculum for Crowd Counting: Is It Worthy?
585

riculum learning, the underlying crowd model, or of
both together? Whether curriculum learning can im-
prove the performance of any kind of crowd models
e.g., shallow, deep, multi-column, encoder-decoder,
and multi-scale, with and without transfer learning?
This work aims to further investigate to answer these
questions.
4 EXPERIMENTS AND
EVALUATION
We conducted more than 112 experiments using eight
(8) mainstream crowd models and two well-known
datasets to investigate the efficacy of curriculum
learning in crowd counting.
4.1 Datasets
The two datasets chosen are ShanghaiTech Part A
and ShanghaiTech Part B datasets, both published in
(Zhang et al., 2016). The datasets contain cross-scene
crowd images with varying crowd densities and have
been extensively used for benchmarking in numerous
studies on crowd counting and density estimation.
4.2 Baseline Crowd Models
We choose eight (8) different crowd models to use in
our experiments. These include MCNN (Zhang et al.,
2016), CMTL (Sindagi and Patel, 2017), MSCNN
(Zeng et al., 2017), CSRNet (Li et al., 2018), SANet
(Cao et al., 2018), TEDnet (Jiang et al., 2019), Yang
et al. (Yang et al., 2020), and SASNet (Song et al.,
2021). The eight crowd models are chosen such that
they vary in terms of model size, complexity, and de-
sign.
4.3 Curriculum Settings
We consider six different types of pacing functions:
linear, quadratic, exponential, root, logarithmic, and
step. These pacing functions are calculated using Eq.
2.
g =
Nb + aNb (linear)
Nb + N
1−b
aT
t
P
− p = 1/2,1,2 (quad)
Nb +
N(1−b)
e
10
−1
exp
10t
aT
− 1
(exp)
Nb + N (1 − b)
1 +
1
10
log
t
aT
+ e
−10
(log)
Nb + N
x
aT
(step)
(2)
For each dataset, we kept the value of b fixed,
while choosing the value of a = [0.2,0.4, 0.6,0.8].
Thus, in each experiment, we take a fraction (b) of full
training data and incrementally add batches according
to the pacing function (with parameter a). The pacing
functions used are plotted in Fig. 2.
4.4 Evaluation Metrics
We used two commonly used metrics to test the per-
formance in the crowd-counting task i.e., mean ab-
solute error (MAE) and mean squared error (MSE).
MAE and MSE can be calculated using Eq. 3 and Eq.
4, respectively.
MAE =
1
N
N
∑
1
(e
n
− g
n
) (3)
MSE =
1
N
N
∑
1
(e
n
− g
n
) (4)
where N represents the total number of examples
in the dataset, g
n
is the actual count of people in the
n
th
crowd image, and e
n
is the estimated count (com-
puted as the sum of pixel values in the predicted den-
sity map for the same image). Other less frequently
used metrics are grid average mean error (GAME)
for more localized counting, structural similarity in-
dex (SSIM), and peak signal-to-noise ratio (PSNR)
for the quality of the predicted density maps.
4.5 Training Details
Each crowd model is trained first on the Shang-
haiTech Part B dataset using standard training. The
same model is trained (from scratch) using curricu-
lum learning with a single pacing function. Since
there are six pacing functions used in this study, the
same model is trained six times with a different pac-
ing function. In each experiment, we carefully se-
lected the pacing function parameter α to define rea-
sonable subsets in each iteration by examining the rel-
ative performance over a few epochs (Fig. 3). Thus,
we conduct a total of seven (7) complete training for
a single model and an overall 56 experiments on the
ShanghaiTech Part B dataset. The same number of ex-
periments are then repeated for the ShanghaiTech Part
A dataset. All models are trained using the PyTorch
framework on two RTX-8000 GPUs. In all experi-
ments, we use Adam optimizer with an initial learning
rate of 1 × 10
−2
and a ReduceLROnPlateau learning
rate decay function based on MAE values.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
586
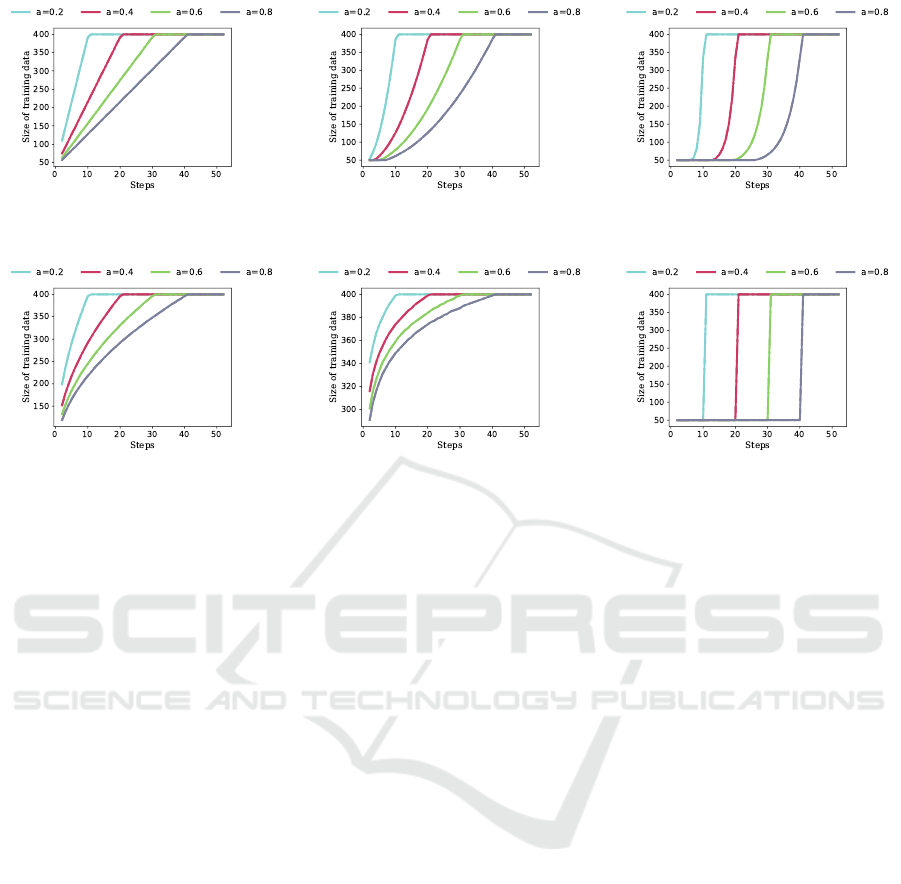
(a) Linear pacing function (b) Quadratic pacing function (c) Exponential pacing function
(d) Root pacing function (e) Log pacing function (f) Step pacing function
Figure 3: Pacing functions used in our experiments.
5 RESULTS AND ANALYSIS
The trained model in each experiment is evaluated
over the two metrics (i.e., MAE and MSE). We care-
fully chose the values of parameters a and b in the
pacing functions to achieve reasonable subsets of
training data in curriculum learning settings. In stan-
dard training, the batches are uniformly sampled from
the full training dataset. The best-achieved results in
each experiment are depicted in Table 1 and 2.
We note several interesting observations in the re-
sults. First, curriculum learning clearly brings signif-
icant improvements in some cases. For instance, on
the ShanghaiTech Part B dataset, the MAE for MCNN
was reduced from 26.4 to 19.2 using the linear pacing
function (best case) and 21.4 using the quadratic pac-
ing function (second best case). Similarly, the MAE
for CSRNet was reduced from 10.6 to 7.8 using the
linear pacing function. On the ShanghaiTech Part A
dataset, the MAE for MCNN was reduced from 110.2
to 102.4 (linear pacing function), and for CSRNet the
MAE was reduced from 68.2 to 58.4.
Second, curriculum learning brings marginal im-
provement in most cases. This is evident from the
MAE values of all models for several selections of
pacing functions. Third, curriculum learning could
not improve or underperforms the standard training
in some cases (indicated with red font color in both
tables). This observation highlights the importance
of the pacing function as an important hyperparam-
eter in curriculum learning. Fourth, the benefit of
curriculum learning is evident for all models on both
datasets. However, the level of improvement varies
among the models which raise the logical question of
what makes curriculum learning outperform standard
training. The last observation is that the benefits of
each pacing function have been consistent to a certain
level. For instance, the best results were produced
by linear function for MCNN (Zhang et al., 2016),
CSRNet (Li et al., 2018), and TEDnet (Jiang et al.,
2019) on both datasets. Similarly, SASNet (Song
et al., 2021) produces better results using the log pac-
ing function on both datasets. The Step function al-
most underperformed all other pacing functions ex-
cept for SANet (Cao et al., 2018) and TEDnet (Jiang
et al., 2019).
Besides the potentially significant results dis-
cussed previously, Fig. 4 depicts the clear benefit
of curriculum learning in terms of convergence time.
The y-axis shows the MSE loss of the model during
the training phase, whereas the top and bottom x-axes
show the number of samples seen by the model during
the curriculum learning and standard training settings.
The loss drops too quickly in curriculum learning as
compared to standard training highlighting the faster
convergence of curriculum learning.
Curriculum for Crowd Counting: Is It Worthy?
587
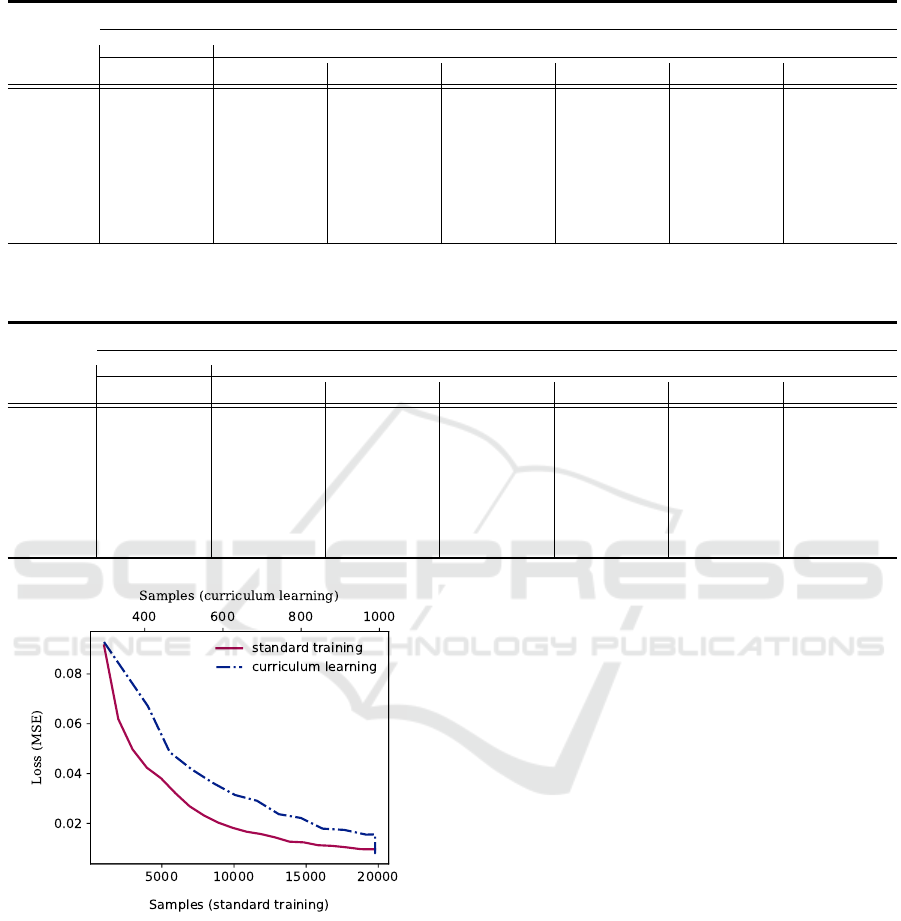
Table 1: A comparison of standard training versus curriculum learning (using six different pacing functions) over Shang-
haiTech Part B dataset using two metrics (MAE and MSE). The bold text shows the lowest error values.
Model
Standard Curriculum Learning
Random Linear Log Quadratic Exponential Step Root
MAE MSE MAE MSE MAE MSE MAE MSE MAE MSE MAE MSE MAE MSE
MCNN 26.4 41.3 19.2 32.2 23.8 38 21.4 33.8 23.1 37.4 23.4 37.4 22.8 37.1
CMTL 20.0 31.1 19.6 30.6 19.8 30.7 18.8 30.4 20.0 31.6 20.2 32.0 19.4 30.5
MSCNN 17.7 30.2 16.9 29.2 17.6 29.9 17.2 29.4 17.8 30.2 17.8 30.1 16.8 28.8
CSRNet 10.6 16.0 7.8 14.2 10.2 16 8.2 14.6 9.4 15.3 9.8 15.8 8.6 14.9
SANet 8.4 13.6 8.4 13.5 8.8 14.0 8.1 13.3 8.5 13.8 8.2 13.4 8.6 13.7
TEDnet 8.2 12.8 7.6 12.2 8.2 12.7 8.3 13 7.7 12.4 8.1 12.6 7.8 12.4
Yang et al. 12.3 21.2 11.8 20.4 11.4 20.0 10.6 18.3 12.2 21.4 12.6 21.6 12.0 20.8
SASNet 6.4 9.9 6.6 10 6.3 9.6 6.8 10.5 7.2 11.2 6.9 10.6 6.4 9.8
Table 2: A comparison of standard training versus curriculum learning (using six different pacing functions) over Shang-
haiTech Part A dataset using two metrics (MAE and MSE). The bold text shows the lowest error values.
Model
Standard Curriculum Learning
Random Linear Log Quadratic Exponential Step Root
MAE MSE MAE MSE MAE MSE MAE MSE MAE MSE MAE MSE MAE MSE
MCNN 110.2 173.2 102.3 150.8 109.6 172.4 108.8 170.6 106.7 169.0 112.4 177.6 102.4 151.2
CMTL 101.3 152.4 96.7 142.4 100.6 151.8 98.2 149.2 103.5 156.2 105.4 160.3 100.2 150.4
MSCNN 83.8 127.4 82.3 122.6 83.4 128.3 82.6 125.8 83.8 129.2 85.8 133.5 81.2 120.8
CSRNet 68.2 115.0 58.4 102.5 62.0 105.4 60.6 105.2 62.2 106.1 62.0 105.5 62.3 106.4
SANet 67.0 104.5 66.9 103.8 68.4 105.4 66.2 100.8 66.4 101.2 70.2 118.4 67.2 105.0
TEDnet 64.2 109.1 60.2 102.9 65.8 114.2 66.4 115.2 65.0 111.3 63.4 106.4 63.8 106.9
Yang et al. 104.6 145.2 102.3 139.0 104.4 143.7 98.4 134.2 104.8 145.8 105.6 147.2 99.1 134.8
SASNet 53.6 88.4 51.2 81.0 51.4 81.4 52.8 86.2 53.2 87.0 55.8 90.4 52.3 84.6
Figure 4: Illustration of model convergence using standard
training versus curriculum learning.
6 CONCLUSIONS
This article presents a detailed experimental analysis
of curriculum learning in crowd-counting. Although
curriculum learning has been effective in reinforce-
ment learning, its efficacy in supervised learning is
not fully evident due to the lack of detailed inves-
tigations. We performed an extensive set of exper-
iments on eight mainstream crowd-counting models
to evaluate the performance of curriculum learning.
The results show significant improvements in some
cases, marginal improvements in most cases with no
improvement in a few cases. Through the detailed
analysis of the results, we conclude that curriculum
learning can potentially improve the performance of
deep learning models by carefully choosing the pac-
ing function and its parameters. Moreover, given the
short training time budget, curriculum learning is a
good choice to cut the convergence time. For future
work, we suggest extending the investigation to other
computer vision tasks using large datasets and differ-
ent scoring functions appropriate to the task.
ACKNOWLEDGEMENT
This publication was made possible by the PDRA
award PDRA7-0606-21012 from the Qatar National
Research Fund (a member of The Qatar Foundation).
The statements made herein are solely the responsi-
bility of the authors.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
588

REFERENCES
Bengio, Y., Louradour, J., Collobert, R., and Weston, J.
(2009). Curriculum learning. In Proceedings of the
26th Annual International Conference on Machine
Learning, ICML ’09, page 41–48, New York, NY,
USA. Association for Computing Machinery.
Boominathan, L., Kruthiventi, S. S. S., and Babu, R. V.
(2016). Crowdnet: A deep convolutional network for
dense crowd counting. Proceedings of the 24th ACM
international conference on Multimedia.
Cao, X., Wang, Z., Zhao, Y., and Su, F. (2018). Scale aggre-
gation network for accurate and efficient crowd count-
ing. In ECCV.
Chan, A. B. and Vasconcelos, N. (2009). Bayesian poisson
regression for crowd counting. In 2009 IEEE 12th
International Conference on Computer Vision, pages
545–551.
Chen, K., Loy, C. C., Gong, S., and Xiang, T. (2012). Fea-
ture mining for localised crowd counting. In BMVC.
Chen, X. and Gupta, A. K. (2015). Webly supervised learn-
ing of convolutional networks. 2015 IEEE Interna-
tional Conference on Computer Vision (ICCV), pages
1431–1439.
Fan, Z., Zhang, H., Zhang, Z., Lu, G., Zhang, Y., and Wang,
Y. (2022). A survey of crowd counting and density es-
timation based on convolutional neural network. Neu-
rocomputing, 472:224–251.
Fang, Y., Zhan, B., Cai, W., Gao, S., and Hu, B. (2019).
Locality-constrained spatial transformer network for
video crowd counting. In 2019 IEEE International
Conference on Multimedia and Expo (ICME), pages
814–819.
Gao, C., Wang, P., and Gao, Y. (2019). Mobilecount:
An efficient encoder-decoder framework for real-time
crowd counting. In Pattern Recognition and Computer
Vision: Second Chinese Conference, PRCV 2019,
Xi’an, China, November 8–11, 2019, Proceedings,
Part II, page 582–595. Springer-Verlag.
Gouiaa, R., Akhloufi, M. A., and Shahbazi, M. (2021). Ad-
vances in convolution neural networks based crowd
counting and density estimation. Big Data Cogn.
Comput., 5:50.
Gu, S. and Lian, Z. (2022). A unified multi-task learning
framework of real-time drone supervision for crowd
counting. ArXiv, abs/2202.03843.
He, K., Zhang, X., Ren, S., and Sun, J. (2016). Deep resid-
ual learning for image recognition. 2016 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 770–778.
Idrees, H., Tayyab, M., Athrey, K., Zhang, D., Al-Maadeed,
S. A., Rajpoot, N. M., and Shah, M. (2018). Compo-
sition loss for counting, density map estimation and
localization in dense crowds. ArXiv, abs/1808.01050.
Ionescu, R. T., Alexe, B., Leordeanu, M., Popescu, M. C.,
Papadopoulos, D. P., and Ferrari, V. (2016). How hard
can it be? estimating the difficulty of visual search in
an image. 2016 IEEE Conference on Computer Vision
and Pattern Recognition (CVPR), pages 2157–2166.
Jiang, X., Xiao, Z., Zhang, B., Zhen, X., Cao, X., Doer-
mann, D. S., and Shao, L. (2019). Crowd counting
and density estimation by trellis encoder-decoder net-
works. 2019 IEEE/CVF Conference on Computer Vi-
sion and Pattern Recognition (CVPR), pages 6126–
6135.
Khan, M. A., Hamila, R., and Menouar, H. (2023a). Clip:
Train faster with less data. In 2023 IEEE International
Conference on Big Data and Smart Computing (Big-
Comp), pages 34–39. IEEE.
Khan, M. A., Menouar, H., and Hamila, R. (2022). Revisit-
ing Crowd Counting: State-of-the-art, Trends, and Fu-
ture Perspectives. arXiv preprint arXiv:2209.07271.
Khan, M. A., Menouar, H., and Hamila, R. (2023b). LCD-
net: a lightweight crowd density estimation model for
real-time video surveillance. Journal of Real-Time Im-
age Processing, 20:29.
Kocmi, T. and Bojar, O. (2017). Curriculum learning and
minibatch bucketing in neural machine translation. In
RANLP.
Krizhevsky, A. (2009). Learning multiple layers of features
from tiny images. Technical report.
Li, M., Zhang, Z., Huang, K., and Tan, T. (2008). Estimat-
ing the number of people in crowded scenes by mid
based foreground segmentation and head-shoulder de-
tection. In 2008 19th International Conference on Pat-
tern Recognition, pages 1–4.
Li, S., Zhu, X., Huang, Q., Xu, H., and Kuo, C.-C. J. (2017).
Multiple instance curriculum learning for weakly su-
pervised object detection. ArXiv, abs/1711.09191.
Li, W., Cao, Z., Wang, Q., Chen, S., and Feng, R. (2021).
Learning error-driven curriculum for crowd count-
ing. 2020 25th International Conference on Pattern
Recognition (ICPR), pages 843–849.
Li, Y., Zhang, X., and Chen, D. (2018). Csrnet: Dilated
convolutional neural networks for understanding the
highly congested scenes. 2018 IEEE/CVF Conference
on Computer Vision and Pattern Recognition, pages
1091–1100.
Ma, Z., Wei, X., Hong, X., and Gong, Y. (2019). Bayesian
loss for crowd count estimation with point supervi-
sion. In 2019 IEEE/CVF International Conference
on Computer Vision (ICCV), pages 6141–6150, Los
Alamitos, CA, USA.
Narvekar, S., Peng, B., Leonetti, M., Sinapov, J., Taylor,
M. E., and Stone, P. (2020). Curriculum learning for
reinforcement learning domains: A framework and
survey. J. Mach. Learn. Res., 21:181:1–181:50.
Peng, T., Li, Q., and Zhu, P. F. (2020). Rgb-t crowd count-
ing from drone: A benchmark and mmccn network. In
ACCV.
Platanios, E. A., Stretcu, O., Neubig, G., P
´
oczos, B., and
Mitchell, T. M. (2019). Competence-based curricu-
lum learning for neural machine translation. ArXiv,
abs/1903.09848.
Qi, W., Gao, J., Wei, L., and Yuan, Y. (2020). Pixel-wise
crowd understanding via synthetic data. International
Journal of Computer Vision, 129:225–245.
Sandler, M., Howard, A., Zhu, M., Zhmoginov, A., and
Chen, L.-C. (2018). Mobilenetv2: Inverted residu-
Curriculum for Crowd Counting: Is It Worthy?
589

als and linear bottlenecks. In 2018 IEEE/CVF Con-
ference on Computer Vision and Pattern Recognition,
pages 4510–4520.
Sangineto, E., Nabi, M., Culibrk, D., and Sebe, N. (2019).
Self paced deep learning for weakly supervised object
detection. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 41:712–725.
Shi, M. and Ferrari, V. (2016). Weakly supervised
object localization using size estimates. ArXiv,
abs/1608.04314.
Shi, X., Li, X., Wu, C., Kong, S., Yang, J., and He, L.
(2020). A real-time deep network for crowd count-
ing. ICASSP 2020 - 2020 IEEE International Con-
ference on Acoustics, Speech and Signal Processing
(ICASSP), pages 2328–2332.
Simonyan, K. and Zisserman, A. (2015). Very deep convo-
lutional networks for large-scale image recognition. In
3rd International Conference on Learning Represen-
tations, ICLR 2015, San Diego, CA, USA, May 7-9,
2015, Conference Track Proceedings.
Sindagi, V. A. and Patel, V. M. (2017). Cnn-based cascaded
multi-task learning of high-level prior and density es-
timation for crowd counting. In 2017 14th IEEE In-
ternational Conference on Advanced Video and Signal
Based Surveillance (AVSS), pages 1–6, Los Alamitos,
CA, USA. IEEE Computer Society.
Song, Q., Wang, C., Wang, Y., Tai, Y., Wang, C., Li, J., Wu,
J., and Ma, J. (2021). To choose or to fuse? scale
selection for crowd counting. In AAAI.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S. E.,
Anguelov, D., Erhan, D., Vanhoucke, V., and Rabi-
novich, A. (2015). Going deeper with convolutions.
2015 IEEE Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 1–9.
Tang, Y., Wang, X., Harrison, A. P., Lu, L., Xiao, J., and
Summers, R. M. (2018). Attention-guided curriculum
learning for weakly supervised classification and lo-
calization of thoracic diseases on chest radiographs.
ArXiv, abs/1807.07532.
Topkaya, I. S., Erdogan, H., and Porikli, F. (2014). Count-
ing people by clustering person detector outputs. In
2014 11th IEEE International Conference on Ad-
vanced Video and Signal Based Surveillance (AVSS),
pages 313–318.
Wang, Q. and Breckon, T. (2022). Crowd counting via seg-
mentation guided attention networks and curriculum
loss. IEEE Transactions on Intelligent Transportation
Systems.
Wang, Q., Lin, W., Gao, J., and Li, X. (2022a). Density-
aware curriculum learning for crowd counting. IEEE
Transactions on Cybernetics, 52:4675–4687.
Wang, W., Caswell, I., and Chelba, C. (2019). Dynamically
composing domain-data selection with clean-data se-
lection by “co-curricular learning” for neural machine
translation. In ACL.
Wang, X., Chen, Y., and Zhu, W. (2022b). A survey on
curriculum learning. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 44(9):4555–4576.
Wu, X., Dyer, E., and Neyshabur, B. (2021). When do cur-
ricula work? ArXiv, abs/2012.03107.
Yang, Y., Li, G., Wu, Z., Su, L., Huang, Q., and Sebe,
N. (2020). Weakly-supervised crowd counting learns
from sorting rather than locations. In Computer Vision
– ECCV 2020: 16th European Conference, Glasgow,
UK, August 23–28, 2020, Proceedings, Part VIII, page
1–17, Berlin, Heidelberg. Springer-Verlag.
Zeng, L., Xu, X., Cai, B., Qiu, S., and Zhang, T. (2017).
Multi-scale convolutional neural networks for crowd
counting. 2017 IEEE International Conference on Im-
age Processing (ICIP), pages 465–469.
Zhang, C., Li, H., Wang, X., and Yang, X. (2015). Cross-
scene crowd counting via deep convolutional neural
networks. 2015 IEEE Conference on Computer Vision
and Pattern Recognition (CVPR), pages 833–841.
Zhang, Y., Zhou, D., Chen, S., Gao, S., and Ma, Y. (2016).
Single-image crowd counting via multi-column con-
volutional neural network. In 2016 IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 589–597.
VISAPP 2024 - 19th International Conference on Computer Vision Theory and Applications
590
